Изобретение относится к области измерения индукции магнитного поля с помощью (феррозондовых) трехкомпонентных магнитометров, в частности к прецизионным измерениям индукции.
Прецизионные измерения индукции магнитного поля основаны на выявлении и учете систематических погрешностей измерения. Одной из доминирующих составляющих основной погрешности является статическая погрешность.
Известно, что статическая погрешность определяется искажающей матрицей трехкомпонентного магнитометра (см. Г.А.Внучков и др., Угловые погрешности измерения магнитной индукции. В сб. Методы и средства исследования структуры геомагнитного поля. - М., ИЗМИРАН, 1989, с. 161-168). Там же предложен способ определения боковых элементов искажающей матрицы трехкомпонентного магнитометра с помощью трехкомпонентной меры магнитной индукции в условиях, когда магнитометр и мера неортогональны. Однако известный способ не дает возможности определить все элементы искажающей матрицы, а потому не дает возможности найти корректирующую матрицу по искажающей.
Известен также способ коррекции результатов измерения трехкомпонентным магнитометром (см. патент США №6130534, кл. G 01 R 35/00, G 01 R 33/02, 2000 г.), основанный на определении корректирующей матрицы. Этот способ по совокупности существенных признаков наиболее близок заявляемому и принят за прототип.
Известный способ включает размещение датчика трехкомпонентного магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, строгую ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля (например, поля Земли) в центре меры, поочередное воспроизведение известного значения магнитной индукции вдоль каждой оси меры, регистрацию выходных сигналов магнитометра по всем его компонентам, нормирование выходных сигналов компонент к соответствующему сигналу от меры, построение нормированной приборной квадратной матрицы из нормированных вектор-столбцов выходных сигналов, использование нормированной для нахождения корректирующей матрицы.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является практическая невозможность ориентации тройки неортогональных чувствительных осей магнитометра вдоль тройки неортогональных осей меры. В описании известного способа содержится следующая фраза: “Мы помещаем калибруемый (корректируемый) датчик трехкомпонентного магнитометра в центре образцовой меры магнитной индукции и тщательно ориентируем его так, чтобы оси магнитометра совпадали с осями меры”. При этом прототип не дает ответа на вопросы, как осуществить тщательную ориентацию при работе с неортогональным магнитометром и неортогональной мерой и какая степень тщательности ориентации допустима.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения корректирующей матрицы.
Технический результат, получаемый при осуществлении изобретения, - возможность определения корректирующей матрицы магнитометра без тщательной ориентации неортогонального магнитометра в неортогональной мере.
Указанный технический результат достигается тем, что в заявляемом способе определения корректирующей матрицы трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения магнитометром магнитного поля, воспроизводимого мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения корректирующей матрицы, в отличие от известного способа, предварительно, используя модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры  в собственной ортогональной системе координат меры, затем устанавливают трехкомпонентный магнитометр, после чего в центре меры воспроизводят магнитное поле
в собственной ортогональной системе координат меры, затем устанавливают трехкомпонентный магнитометр, после чего в центре меры воспроизводят магнитное поле  поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения всех компонент магнитометром, по которым определяют нормированную приборную матрицу
поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения всех компонент магнитометром, по которым определяют нормированную приборную матрицу  по формуле
по формуле

где  - результаты измерения магнитометром трех компонент магнитного поля, воспроизводимого мерой при положительной и отрицательной полярности;
- результаты измерения магнитометром трех компонент магнитного поля, воспроизводимого мерой при положительной и отрицательной полярности;
затем находят искажающую матрицу магнитометра в собственной системе координат меры по формуле

где  - искажающая матрица магнитометра в собственной системе координат меры;
- искажающая матрица магнитометра в собственной системе координат меры;  - обратная матрица
- обратная матрица 
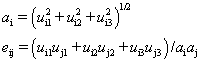
по которой определяют элементы  , диагональной матрицы
, диагональной матрицы  остаточных калибровочных коэффициентов магнитометра по формуле
остаточных калибровочных коэффициентов магнитометра по формуле
где  - элементы матрицы
- элементы матрицы  и неортогональности осей магнитометра по формуле
и неортогональности осей магнитометра по формуле

где  - неортогональность i-й и j-й магниточувствительных осей магнитометра,
- неортогональность i-й и j-й магниточувствительных осей магнитометра,
по которым строят матрицу осей магнитометра  в собственной ортогональной системе координат магнитометра, в которой находят искажающую матрицу магнитометра по формуле
в собственной ортогональной системе координат магнитометра, в которой находят искажающую матрицу магнитометра по формуле

а искомую корректирующую матрицу  определяют как обратную искажающей.
определяют как обратную искажающей.
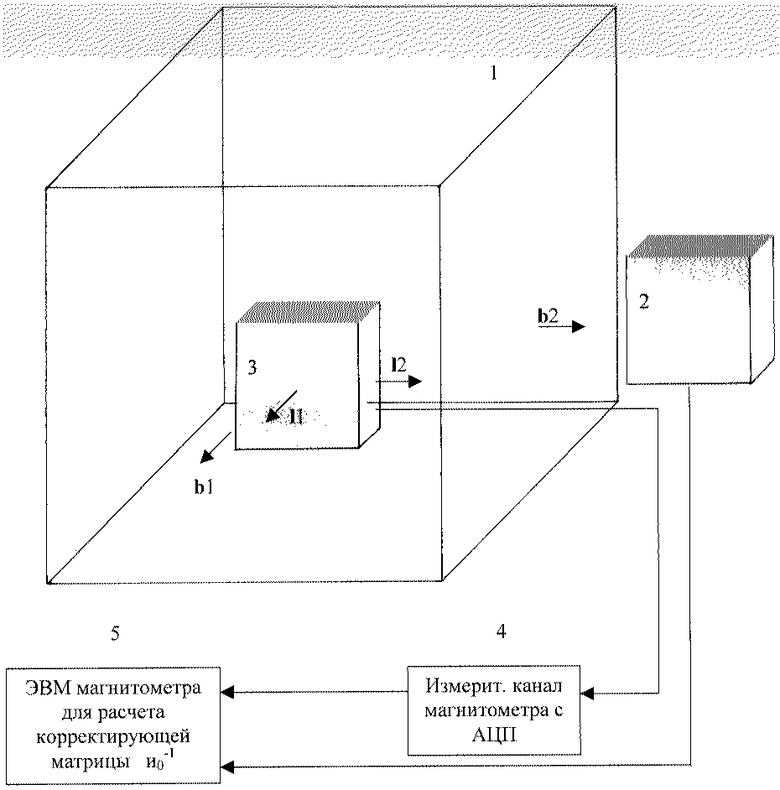
На чертеже изображена блок-схема реализации предлагаемого способа определения корректирующей матрицы трехкомпонентного магнитометра.
Блок-схема включает образцовую трехкомпонентную меру 1 магнитной индукции (МИ), в рабочей области которой вначале помещен модульный магнитометр 2 для определения неортогональностей меры, затем датчик 3 корректируемого трехкомпонентного магнитометра. Датчик 3 подключен к измерительному каналу магнитометра и аналого-цифровому преобразователю 4, выход которого связан с входом ЭВМ прибора 5 для расчета корректирующей матрицы трехкомпонентного магнитометра. Выход модульного магнитометра также связан с входом ЭВМ прибора.
Заявляемый способ определения корректирующей матрицы трехкомпонентного магнитометра осуществляется следующим образом.
В центральной зоне образцовой трехкомпонентной меры 1 магнитной индукции компенсируют магнитные поля Земли и других внешних источников. В рабочую зону меры 1 помещают модульный магнитометр 2 и создают мерой поочередно комбинации полей
модули которых измеряют прецизионным модульным магнитометром. Неортогональность меры 1 между ее осями 1 и 2 определяют (см. аналог Угловые погрешности измерения...) по формуле
Аналогично определяют остальные неортогональности Е13 по комбинации полей  и
и  и Е23 по комбинации
и Е23 по комбинации  и
и  .
.
Затем в рабочую зону помещают датчик 3 корректируемого трехкомпонентного магнитометра 4, оси которого ориентируют вдоль осей меры, после чего вдоль каждой оси меры 1 по очереди воспроизводят мерой точно известное значение магнитного поля  или
или  при положительной и отрицательной полярности, при этом измеряют магнитометром 4 соответствующие вектор-столбцы
при положительной и отрицательной полярности, при этом измеряют магнитометром 4 соответствующие вектор-столбцы

Результаты измерения модульным магнитометром 2 (или заранее определенные неортогональности меры 1  значения полей
значения полей  , воспроизводимые мерой, и соответствующие результаты измерения магнитометром 3, 4
, воспроизводимые мерой, и соответствующие результаты измерения магнитометром 3, 4  заносятся в ЭВМ прибора 5. ЭВМ осуществляет нормирование результатов измерения, построение нормированной приборной матрицы
заносятся в ЭВМ прибора 5. ЭВМ осуществляет нормирование результатов измерения, построение нормированной приборной матрицы

и вычисление по заданным нормированной матрице и неортогональностям меры искажающей  и корректирующей
и корректирующей  матриц магнитометра в выбранной собственной ортогональной системе координат магнитометра 4. На этом процесс определения корректирующей матрицы завершается. Впоследствии магнитометр 3, 4 вынимают из меры 1 и последующие результаты измерения
матриц магнитометра в выбранной собственной ортогональной системе координат магнитометра 4. На этом процесс определения корректирующей матрицы завершается. Впоследствии магнитометр 3, 4 вынимают из меры 1 и последующие результаты измерения  корректируют (исправляют) по одной из следующих схем:
корректируют (исправляют) по одной из следующих схем:
 или
или  или
или 
где  - уходы нуля магнитометра;
- уходы нуля магнитометра;  - динамическая погрешность измерения.
- динамическая погрешность измерения.
В первой схеме вносится поправка на статическую погрешность измерения, во второй - на статическую погрешность и уходы нулей, в третьей - на статическую погрешность, уходы нулей и динамическую погрешность. Во всех схемах основным объектом является корректирующая матрица магнитометра в собственной ортогональной системе координат магнитометра.
Процедура определения корректирующей матрицы в собственной ортогональной системе координат магнитометра по измеренным нормированной приборной матрице  и неортогональностям меры
и неортогональностям меры  неочевидна и нуждается в более подробных пояснениях. Рассмотрим модель искажений вначале для однокомпонентного магнитометра. Результат измерения однокомпонентным магнитометром
неочевидна и нуждается в более подробных пояснениях. Рассмотрим модель искажений вначале для однокомпонентного магнитометра. Результат измерения однокомпонентным магнитометром  , на некоторое единичное базовое направление
, на некоторое единичное базовое направление  , можно представить как проекцию измеряемого поля
, можно представить как проекцию измеряемого поля  на некоторую единичную ось магнитометра
на некоторую единичную ось магнитометра 
где коэффициент  учитывает отклонение от единицы в силу несовершенства настройки, нестабильности и несовершенства калибровки однокомпонентного магнитометра,
учитывает отклонение от единицы в силу несовершенства настройки, нестабильности и несовершенства калибровки однокомпонентного магнитометра,  - собственный уход нуля магнитометра по оси
- собственный уход нуля магнитометра по оси  . Другим источником погрешности является не строгое совпадение оси магнитометра
. Другим источником погрешности является не строгое совпадение оси магнитометра  с базовой осью
с базовой осью  .
.
Применяя эту однокомпонентную модель к трехкомпонентному магнитометру, получим, что вектор-столбцы результатов измерения  , измеряемой индукции
, измеряемой индукции  и собственного ухода нулей магнитометра
и собственного ухода нулей магнитометра  связаны некоторой искажающей матрицей
связаны некоторой искажающей матрицей 

т.е. искажающая матрица преобразует (“искажает”) по величине и направлению измеряемый вектор (истинная магнитная индукция) в другой вектор (результат измерения минус уход нуля).
Искажающая образуется из произведения диагональной матрицы калибровочных коэффициентов магнитометра  на матрицу
на матрицу  , составленную из вектор-строк единичных осей
, составленную из вектор-строк единичных осей  магнитометра
магнитометра
Очевидно, что элементы каждой оси  зависят от выбора системы координат (СК), соответственно матрица осей
зависят от выбора системы координат (СК), соответственно матрица осей  и искажающая
и искажающая  тоже зависят от выбора СК. В отличие от
тоже зависят от выбора СК. В отличие от  , матрица
, матрица  - диагональная и не зависит от выбора системы координат. Она зависит только от качества настройки, стабильности и калибровки магнитометра. Чем лучше настройка, стабильность и калибровка i-й компоненты, тем ближе калибровочный коэффициент
- диагональная и не зависит от выбора системы координат. Она зависит только от качества настройки, стабильности и калибровки магнитометра. Чем лучше настройка, стабильность и калибровка i-й компоненты, тем ближе калибровочный коэффициент  к единице. Однако даже строгое равенство
к единице. Однако даже строгое равенство  не гарантирует высокой точности измерения, т.к. в общем случае оси
не гарантирует высокой точности измерения, т.к. в общем случае оси  неортогональны между собой и не совпадают полностью с ортами базовой СК. Угловые отклонения осей магнитометра сказываются на точности. Чем ближе в целом
неортогональны между собой и не совпадают полностью с ортами базовой СК. Угловые отклонения осей магнитометра сказываются на точности. Чем ближе в целом  к единичной матрице, тем точнее магнитометр.
к единичной матрице, тем точнее магнитометр.
Если в соотношении  поле внешнего происхождения
поле внешнего происхождения  заменить на поле, воспроизводимое мерой
заменить на поле, воспроизводимое мерой  , вдоль ее i-й оси
, вдоль ее i-й оси  , т.е. в положительном направлении, то получим нормированный к модулю поля меры вектор-столбец
, т.е. в положительном направлении, то получим нормированный к модулю поля меры вектор-столбец  . Если поменять полярность поля меры вдоль ее i-й оси, то ее ось меняется на противоположную и
. Если поменять полярность поля меры вдоль ее i-й оси, то ее ось меняется на противоположную и  (модуль поля меры
(модуль поля меры  всегда остается со знаком плюс). Отсюда следует, что нормированная приборная матрица
всегда остается со знаком плюс). Отсюда следует, что нормированная приборная матрица

является (скалярным) произведением искажающей матрицы магнитометра  на матрицу из вектор-столбцов осей меры
на матрицу из вектор-столбцов осей меры  . При этом уходы нулей магнитометра и остаточное внешнее поле взаимокомпенсируются. Обе матрицы
. При этом уходы нулей магнитометра и остаточное внешнее поле взаимокомпенсируются. Обе матрицы  и
и  должны рассматриваться в одной и той же СК, они зависят от выбора СК, но их произведение
должны рассматриваться в одной и той же СК, они зависят от выбора СК, но их произведение  инвариантно к выбору СК.
инвариантно к выбору СК.
Очевидно, для того чтобы исправлять результаты измерений, корректирующая матрица должна быть  и только
и только
тогда как в прототипе в качестве корректирующей фигурирует  , что неправильно (к тому же в прототипе не учитываются и уходы нулей
, что неправильно (к тому же в прототипе не учитываются и уходы нулей  ). Для того чтобы получить истинную корректирующую,
). Для того чтобы получить истинную корректирующую,  следовало бы дополнительно умножить на
следовало бы дополнительно умножить на  слева
слева

Т.е., если бы матрица  была известна в некоторой СК, то при известной нормированной приборной
была известна в некоторой СК, то при известной нормированной приборной  корректирующая была бы определена в той же СК.
корректирующая была бы определена в той же СК.
Удобно выбрать такую ортогональную СК меры (ОСКМ), чтобы можно было бы упростить точное выражение всех элементов матрицы осей меры  через ее неортогональности
через ее неортогональности  . Выберем ОСКМ с ортами
. Выберем ОСКМ с ортами  , например, так, чтобы орт
, например, так, чтобы орт  ОСКМ совпал с осью меры
ОСКМ совпал с осью меры  , а ось меры
, а ось меры  лежала в плоскости ортов
лежала в плоскости ортов 
В выбранной ОСКМ, которую мы будем именовать собственной ОСКМ и обозначать через индекс “м”, вся матрица осей меры  следующим образом выражается через ее неортогональности
следующим образом выражается через ее неортогональности  :
: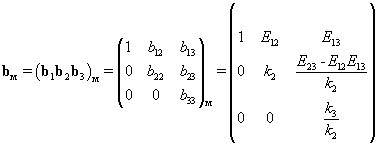
где 
Соотношения выше приведены в качестве примера. Собственную ОСКМ можно было бы выбрать, по крайней мере, девятью равноправными способами и получить похожие выражения матрицы осей через их неортогональности (шесть способов, когда матрица осей имеет три нулевых боковых элемента, и еще три способа, когда матрица осей имеет два нулевых элемента, а два ненулевых элемента, симметричных относительно главной диагонали, равны между собой). Т.е. любую тройку неортогональных осей можно выразить точно и просто в одной из 9-ти собственных ортогональных СК через неортогональности осей тройки.
Итак, по найденным неортогональностям меры строят матрицу осей  в одной из собственных ОСКМ и находят искажающую магнитометра в той же ОСКМ по формуле
в одной из собственных ОСКМ и находят искажающую магнитометра в той же ОСКМ по формуле

Матрицу  можно было бы использовать для коррекции в случае, если магнитометр выполнял бы последующие измерения в собственной ОСКМ, не меняя своей ориентации относительно меры. Но нас интересует возможность коррекции магнитометра, вынутого из меры и произвольно ориентированного, т.е. возможность коррекции в собственной ортогональной СК магнитометра (ОСКМАГ). Заметим, что по найденной искажающей в ОСКМ
можно было бы использовать для коррекции в случае, если магнитометр выполнял бы последующие измерения в собственной ОСКМ, не меняя своей ориентации относительно меры. Но нас интересует возможность коррекции магнитометра, вынутого из меры и произвольно ориентированного, т.е. возможность коррекции в собственной ортогональной СК магнитометра (ОСКМАГ). Заметим, что по найденной искажающей в ОСКМ  можно определить неизвестные элементы матрицы
можно определить неизвестные элементы матрицы  и неортогональности осей магнитометра
и неортогональности осей магнитометра  , поскольку названные величины не зависят от выбора СК
, поскольку названные величины не зависят от выбора СК
где  - элементы
- элементы  .
.
По аналогии с вышерассмотренным примером выражения матрицы осей меры  в одной из собственных ОСКМ выбирают одну из собственных ОСКМАГ и определяют в ней матрицу осей магнитометра
в одной из собственных ОСКМ выбирают одну из собственных ОСКМАГ и определяют в ней матрицу осей магнитометра  (нижний индекс “0” означает принадлежность к собственной ОСКМАГ) через найденные неортогональности осей магнитометра
(нижний индекс “0” означает принадлежность к собственной ОСКМАГ) через найденные неортогональности осей магнитометра  .
.
Например, выберем ортонормированный базис ОСКМАГ  на осях магнитометра так чтобы
на осях магнитометра так чтобы
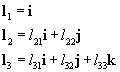
Откуда получают матрицу осей магнитометра в выбранной ОСКМАГ l0 через найденные неортогональности eij
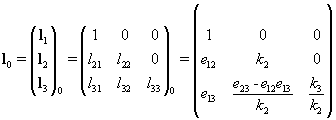
где 
Так находят искомые искажающую и ее обратную (т.е. корректирующую) матрицы

в выбранной собственной ОСКМАГ.
Рассмотренную выше процедуру повторяют на различных диапазонах измерения и соответственно для каждого диапазона находят свои искажающую и корректирующую матрицы в выбранной собственной ОСКМАГ.
В некоторых случаях дополнительно определяют и матрицу связи s между выбранными собственными ОСКМ и ОСКМАГ

Это соотношение вытекает из нижеследующего, еще раз поясняющего свойства всех упомянутых матриц


где  - транспонированная
- транспонированная  , поскольку матрица
, поскольку матрица  ортогональна, то
ортогональна, то 
Для проверки возможностей заявляемого способа в сравнении со способом-прототипом с помощью системы автоматизации расчетов MatLab вычислены точностные показатели коррекции в виде максимального элемента матриц

 - для способа-прототипа;
- для способа-прототипа;
 - для заявляемого способа
- для заявляемого способа
в условиях, характеризуемых максимальными элементами матриц: искажающей  осей меры
осей меры  и углового рассогласования между мерой и магнитометром
и углового рассогласования между мерой и магнитометром 
Результаты расчета приведены в таблице.
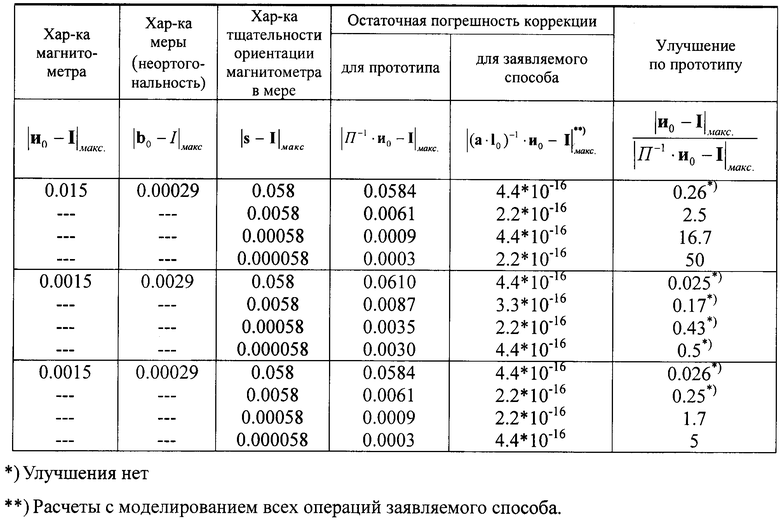
Можно показать, что неблагоприятные условия коррекции для способа-прототипа соответствуют неравенству

Как видно из данных таблицы, при неблагоприятных условиях коррекция по способу-прототипу не улучшает, а ухудшает точность корректируемого магнитометра. Вместе с тем данные свидетельствуют о значительных точностных преимуществах заявляемого способа при всех условиях. В частности, заявляемый способ дает возможность осуществлять точную коррекцию без тщательной ориентации неортогонального магнитометра в неортогональной мере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| Способ измерения приращения индукции магнитного поля дифференциальным магнитометром | 2021 |
|
RU2789143C2 |
| Способ калибровки трехкомпонентного магнитометра | 2017 |
|
RU2654073C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
Использование: изобретение относится к области измерения индукции магнитного поля трехкомпонентными магнитометрами, в частности к прецизионным измерениям индукции. Сущность: с помощью модульного магнитометра измеряют неортогональности осей трехкомпонентной меры магнитной индукции. Затем в меру помещают трехкомпонентный магнитометр, воспроизводят точное значение магнитной индукции поочередно вдоль каждой оси меры и составляют приборную матрицу из трех вектор-столбцов результатов измерения магнитометром, нормированных к соответствующему значению, воспроизводимому мерой. По измеренным неортогональностям осей меры строят матрицу ее осей в собственной ортогональной системе координат меры. По нормированной приборной матрице осей меры определяют корректирующую матрицу магнитометра в его собственной ортогональной системе координат. Технический результат: определение корректирующей без тщательной ориентации неортогонального магнитометра в неортогональной мере, повышение точности определения корректирующей матрицы. 1 табл., 1 ил.
Способ определения корректирующей матрицы трехкомпонентного магнитометра, включающий размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения магнитометром магнитного поля, воспроизводимого мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения корректирующей матрицы, отличающийся тем, что предварительно, используя модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры  в собственной ортогональной системе координат меры, затем устанавливают трехкомпонентный магнитометр, после чего в центре меры воспроизводят магнитное поле BMi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения всех компонент магнитометром, по которым определяют нормированную приборную матрицу П по формуле
в собственной ортогональной системе координат меры, затем устанавливают трехкомпонентный магнитометр, после чего в центре меры воспроизводят магнитное поле BMi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения всех компонент магнитометром, по которым определяют нормированную приборную матрицу П по формуле

где  - результаты измерения магнитометром трех компонент магнитного поля, воспроизводимого мерой при положительной и отрицательной полярности,
- результаты измерения магнитометром трех компонент магнитного поля, воспроизводимого мерой при положительной и отрицательной полярности,
затем находят искажающую матрицу магнитометра в собственной системе координат меры по формуле

где  - искажающая матрица магнитометра в собственной системе координат меры;
- искажающая матрица магнитометра в собственной системе координат меры;  - обратная матрица
- обратная матрица  ,
,
по которой определяют элементы  диагональной матрицы
диагональной матрицы  остаточных калибровочных коэффициентов магнитометра по формуле
остаточных калибровочных коэффициентов магнитометра по формуле
где  - элементы матрицы
- элементы матрицы  ,
,
и неортогональности осей магнитометра по формуле

где  - неортогональность i-й и j-й магниточувствительных осей магнитометра, по которым строят матрицу осей магнитометра l0 в собственной ортогональной системе координат магнитометра, в которой находят искажающую матрицу магнитометра по формуле
- неортогональность i-й и j-й магниточувствительных осей магнитометра, по которым строят матрицу осей магнитометра l0 в собственной ортогональной системе координат магнитометра, в которой находят искажающую матрицу магнитометра по формуле

а искомую корректирующую матрицу  определяют как обратную искажающей.
определяют как обратную искажающей.
| Устройство для калибровки магнитометра | 1978 |
|
SU779950A1 |
| Устройство для поверки магнитометров | 1989 |
|
SU1762283A1 |
| US 6130534, 10.10.2000 | |||
| US 5117375, 26.05.1992 | |||
| US 4109199, 22.08.1978. | |||

