В-6
СЛ
С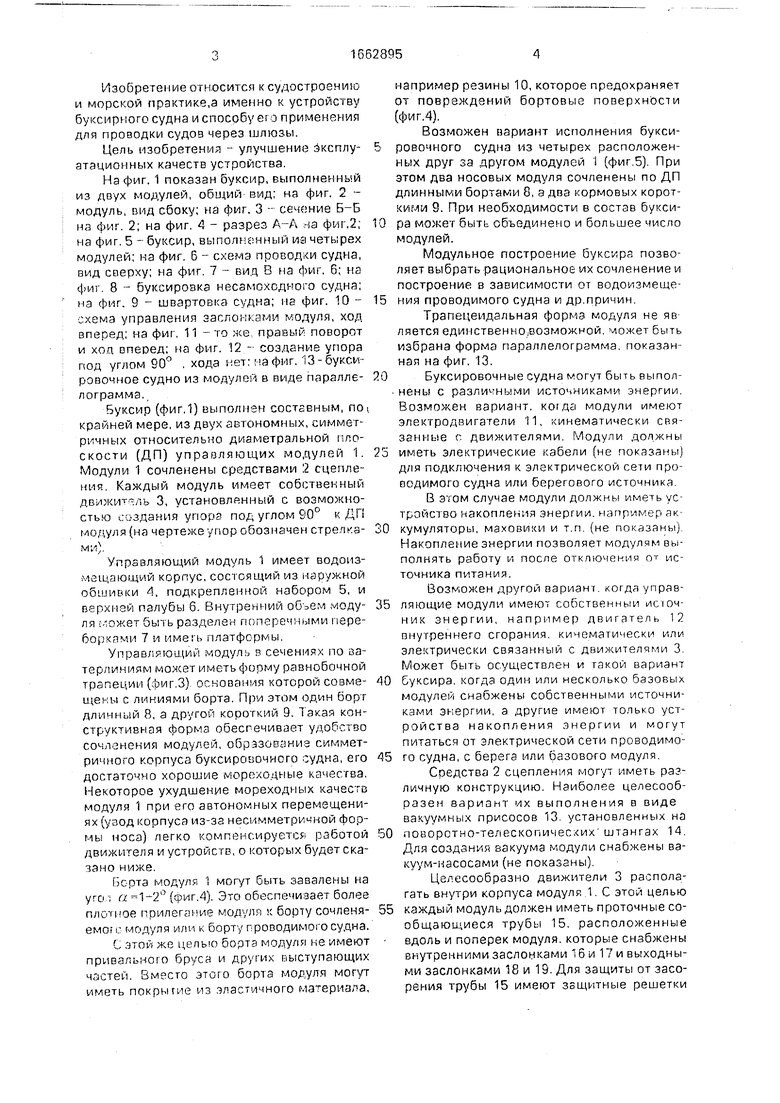

| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНО-ИНТЕГРАЛЬНЫЙ БАРЖЕ-БУКСИРНЫЙ СОСТАВ | 2012 |
|
RU2488512C1 |
| ТРАНСПОРТНОЕ СУДНО | 2007 |
|
RU2395426C2 |
| ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ РАБОТЫ ПРЕИМУЩЕСТВЕННО В МЕЛКОВОДНЫХ ЗАМЕРЗАЮЩИХ АКВАТОРИЯХ | 2013 |
|
RU2549739C1 |
| Ледокольное судно (варианты) | 2017 |
|
RU2655177C1 |
| РЕВЕРСИВНО-РУЛЕВОЕ УСТРОЙСТВО ВОДОМЕТНОГО ДВИЖИТЕЛЯ | 2019 |
|
RU2712408C1 |
| БЫСТРОХОДНОЕ СУДНО НА ВОЗДУШНОЙ КАВЕРНЕ | 2019 |
|
RU2714040C1 |
| МОРЕХОДНОЕ ЛЕДОКОЛЬНО-ТРАНСПОРТНОЕ СУДНО И ДВИЖИТЕЛЬНО-РУЛЕВОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2006 |
|
RU2321520C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| МОРСКОЕ САМОХОДНОЕ САМОПОДЪЕМНОЕ КРАНОВОЕ СУДНО | 2015 |
|
RU2603423C1 |
| СЦЕПНОЕ УСТРОЙСТВО ТОЛКАЧА С НЕСАМОХОДНЫМ СУДНОМ | 1997 |
|
RU2117601C1 |
Изобретение относится к судостроению, в частности к устройству буксирного типа для проводки судов через шлюзы, и служит для улучшения эксплуатационных качеств. Буксировочное судно содержит автономные буксиры, выполненные в виде модулей, имеющих в сечении по ватерлинии либо форму равносторонней трапеции, либо параллелограмма. Каждый буксир включает движитель 3, установленный в проточной трубе, снабженной заслонками 16, 17, 18 и 19, служащими для перекрытия проточной трубы и для создания упора под 90°. Буксиры могут подсоединяться у носовой и кормовой оконечностей по обоим бортам буксируемого судна. Движение по курсу обеспечивается движителями буксиров или судна, а управление маневрированием - движителями буксиров. Возможно выполнение буксировочного судна с четырьмя, шестью и более модулями. 5 з.п.ф-лы, 13 ил.
16
Фм.д
18
П
п
о о ю со ю
СЛ
Изобретение относится к судостроению и морской практике,а именно к устройству буксирного судна испосрбуего применения для проводки судов через шлюзы.
Цель изобретения - улучшение Эксплу- атационных качеств устройства.
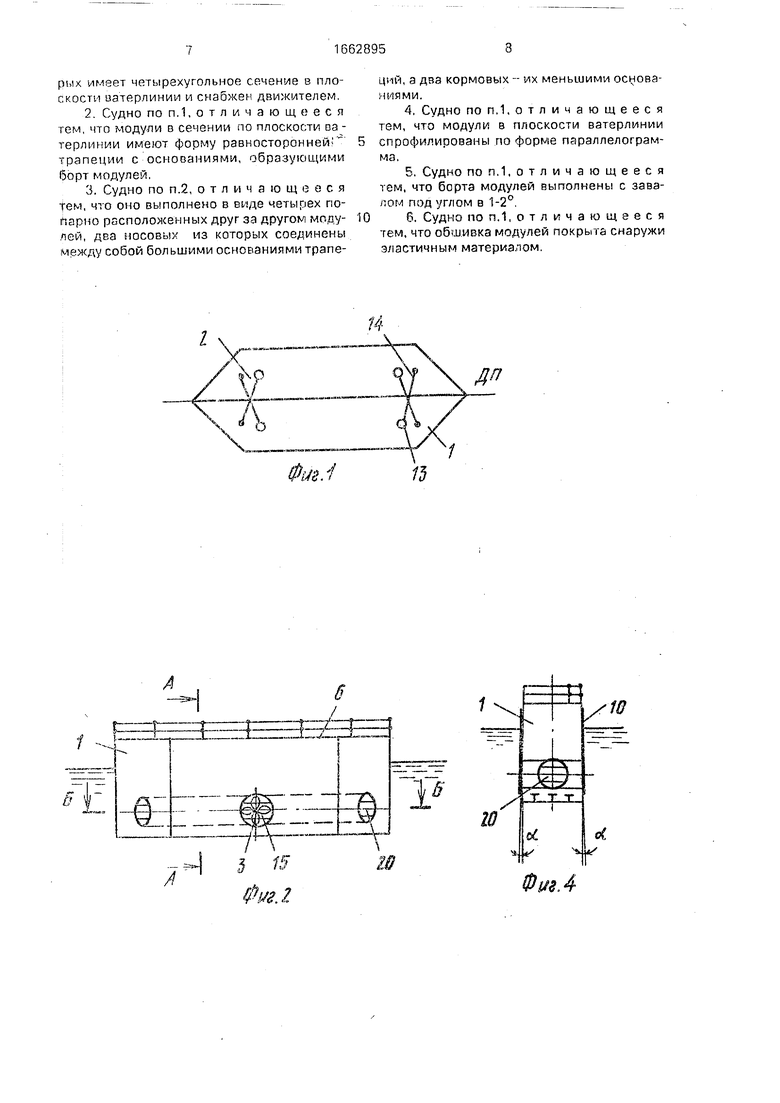
На фиг. 1 показан буксир, выполненной из двух модулей, общий вид; на фиг. 2 - модуль, вид сбоку; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - разрез А-А на фмг.2; на фиг. 5 - буксир, выполненный из четырех модулей; на фиг. 6 - схема проводки судна, вид сверху; на фиг. 7 - вид В на фиг, 6; на фиг. 8 - буксировка несамоходного судна; на фиг. 9 - швартовка судна; на фиг. 10 - схема управления заслонками модуля, ход вперед; на фиг. 11 - то же, правый поворот и ход вперед; на фиг. 12 - создание упора под углом 90° , хода нет; па фиг. 13-буксировочное судно из модулей в виде паралле- лограмма.
Буксир (фиг.1) выполнен составным, по крайней мере, из двух автономных, симметричных относительно диаметральной плоскости (ДП) управляющих модулей 1. Модули 1 сочленены средствами 2 сцепления. Каждый модуль имеет собственный движитель 3, установленный с возможностью создания упорз под углом 90° к ДП модуля {на чертеже упор обозначен стрелка-
ми}
Управляющий модуль 1 имеет водоиз- мещающий корпус, состоящий из наружной обшивки Л, подкрепленной набором 5, и верхней палубы 6. Внутренний объем моду- ля может быть разделен поперечными переборками 7 и иметь платформы.
Управляющий модуль в сечениях по ватерлиниям может иметь форму равнобочной трапеции {фиг.3) основания которой совме- щены с линиями борта. При этом один борг длинный В, а другой короткий 9. Такая конструктивная форма обеспечивает удобство сочленения модулей, образование симметричного корпуса буксировочного судна, его достаточно хорошие мореходные качества. Некоторое ухудшение мореходных качеств модуля 1 при его автономных перемещениях (увод корпуса из-за несимметричной формы носа) легко компенсируется работой движителя и устройств, о которых будет сказано ниже.
Борта модуля 1 могут быть завалены на «--1-2° (фиг.4). Это обеспечивает более плотное прилегание модуля к борту сочленя- емогг, модуля или к борту проводимого судна.
С этой же целью борта модуля не имеют привального бруса и других выступающих частей. Вместо этого борта модуля могут иметь покрытие из эластичного материала,
например резины 10, которое предохраняет от повреждений бортовые поверхности (фиг.4).
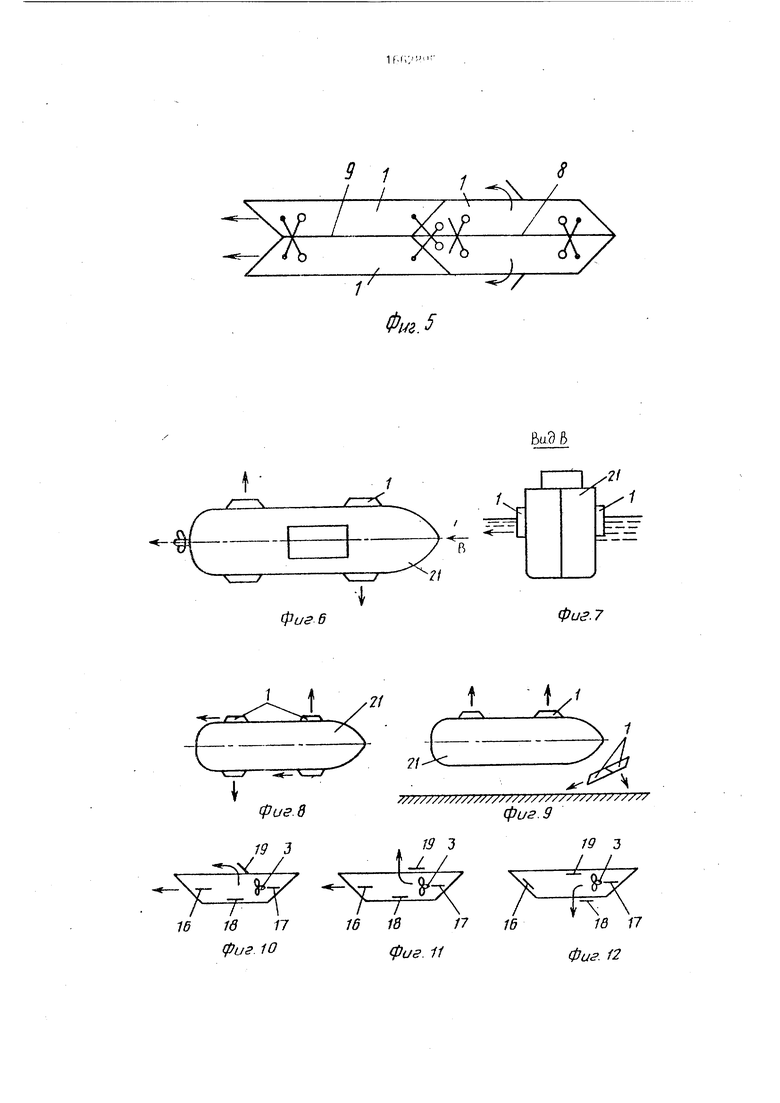
Возможен вариант исполнения буксировочного судна из четырех расположенных друг за другом модулей I (фиг.5). При этом два носовых модуля сочленены по ДП длинными бортами 8, а два кормовых короткими 9. При необходимости в состав буксира может быть объединено и большее число модулей.
Модульное построение буксира позволяет выбрать рациональное их сочленение и построение в зависимости от водоизмещения проводимого судна и др.причин.
Трапецеидальная форма модуля не является единственно.возможной, может быть избрана форма параллелограмма, показанная на фиг. 13.
Буксировочные судна могут быть выполнены с различными источниками энергии Возможен вариант, когда модули имеют электродвигатели 11, кинематически связанные с движителями. Модули должны иметь электрические кабели (не показаны) для подключения к электрической сети проводимого судна или берегового источника
В этом случае модули должны иметь устройство накопления энергии, например ак кумуляторы, маховики и т п (не показаны) Накопление энергии позволяет модулям выполнять работу и после отключения от источника питания.
Возможен другой вариант когда управляющие модули имеют собственный источник энергии, например двигатель 12 внутреннего сгорания, кинематически или электрически связанный с движителями 3 Может быть осуществлен и такой вариант Буксира, когда один или несколько базовых модулей снабжены собственными источниками энергии, а другие имеют только устройства накопления энергии и могут питаться от электрической сети проводимого судна, с берега или базового модуля.
Средства 2 сцепления могут иметь различную конструкцию. Наиболее целесообразен вариант их выполнения в виде вакуумных присосов 13. установленных на поворотно-телескопических штангах 14. Для создания вакуума модули снабжены вакуум-насосами (не показаны).
Целесообразно движители 3 располагать внутри корпуса модуля 1. С этой целью каждый модуль должен иметь проточные сообщающиеся трубы 15. расположенные вдоль и поперек модуля, которые снабжены внутренними заслонками 16 и 17 и выходными заслонками 18 и 19. Для защиты от засорения трубы 15 имеют защитные решетки
Движитель 3 (например, гребной винт) может быть расположен в продольной и (или) лопереииой части трубы 15. Выбор количества и мес га расположения движителей производится я соответствии с известными правилами проектирование судов.
Способ проводки судна с помощью бук сира состоит в следующем.
Буксир подходит к судну 21 и разделяется на отдельные автономные управляю- щие модули 1. Для этого отключ эют сакуум-насосы и отделяют присосы 13 от палуб 6 соседних модулей v. устанавливают с помощью поворотно-телескопических штанг 14 а штатное положение.
Под действием собственных движителей 3 каждый модуль 1 или группа модулей подходят х проводимому судну 21 и закрепляются вблизи от оконеччостей по правому и левому борту. Закрепление модулей в че- тырех крайних iочках судна 21 позволяет наиболее эффективно обеспечивать управление, повороты и удержание судно на курсе, так как создает наибо/u шии вращающий момент. Если мощности одиночных модулей недостаточно, то используют группы из двух и более модулей, закрепляемых а тех же местах судна
Перемещение судна 21 вдоль заданной траектории может быть обеспечено либо движителями модулей, либо собственными движителями судна 21. При этом в течение всего процесса проводки модули 1 сохраняют неизменным свое положение относительно судна 21.
В качестве средств крепления могут быть использованы вакуумные присосы 13.
Как известно, перемещение судов в гаванях, портах, через шлюзы при небольших глубинах может осуществляться только на малом ходу. Но рулевое устройство при малых ходовых скоростях неэффективно. Поэтому проводку судов осуществляют буксиры, которые не только тянут, но и управляют перемещением судна.
Для буксира предлагаемой конструкции возможны два случая использования. В первом случае перемещение вдоль заданной траектории судна 21 происходит под действием собственного движителя, удержание
на курсе и повороты - с помощью управляющих модулей 1. Так,поворот влево осуществляется за счет момента вращения, создаваемого упорами движителей (направляемых под углом 90° к ДП) правого носового и левого кормового модулей (фиг. 6. 7).
Во втором случае использования буксира (фиг.8) модули перемещают несамоходное судно вдоль траектории движения и обеспечивают повороты и удержание на курсе. Два модуля левого борта ведут швартовку судна 21 к причальной стенке, а два модуля правого борта открепились от судна 11, соединились и движутся вперед и налево для соединения с модулями левого борта.
Маневрирование одиночных модулей и буксира предлагаемой конструкции произ водится за счет оаботы движителей и управ пения заслонками 15-18. При этом в зависимости от вида маневра, имела движителей и места их расположения меняется характер управления заслонками 16-19.
Пример. Рассмотрим маневрирование одиночногс модуля, имеющего один движитель 3, установленный в продольной части трубы 15.
Для движения модуля вперед заслонки 16 и 17 должны быть открыты, заслонка 18 закрыта, заслонка 19 частично открыта для компенсации сноса вгево из-за несимметричности обводов носовой конечности модуля (фиг. 10).
. Для движения вперед с поворотом вправо заслонки 16, 17 и 19 должны быть открыты, заслонка 18 закрыта. Упор направлен под углом 90°С к ДП и в плоскости про - дольного перемещения (фиг 11)
Для создания бокового перемещения заслонки 16 и 19 должны быть закрыты, заслонки 17 и 18 открыты. Хода вперед нет (фиг.12).
Пример перемещения буксира, состоящего из четырех модулей, показан на фиг 5. При этом носовые модули создают упор в продольном направлении через приоткрытые бортовые заслонки 18, а кормовые - через открытые заслонки 16 и 17
Управление работой модулей при проводке судна осуществляется централизованно, например лоцманом, находящимся на мостике проводимого судна 21
Формула изобретения
6
А
7Ч 5 15 Фиг.1
0
ций, а два кормовых - их меньшими основаниями.
/да
-т
w
/
Т Т Т
&L t/
Фиг. 4
(pus 6
фиг 8
19 3 V /
фиг 9
А 3 t-/ /
/ff 3
/ /
-v;y -v
Г Т Л/ 7 / {л
/б Л5 7/5 /5/7/ /5 /7
Фиг Юфиг ffфиг
Vл
Фиг. 5
,/
г
Фие.7
21
If /
/фиг 9
/ff 3
/ /
фиг. 13
| Модульный многониточный толкаемый состав | 1982 |
|
SU1068331A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
