Изобретение относится к области судовождения и может быть использовано для дистанционного управления группой полностью автономных буксиров-автоматов в процессе буксировки обеспечиваемого судна в порту.
Известны различные технические решения в рассматриваемой области.
Так, известен патент РФ на изобретение №2470828 (МПК В63Н 25/04, опублик. 27.12.2012). Способ управления траекторией движения буксируемого судна, основанный на определении координат расположенных в его диаметральной плоскости носовой и кормовой точек, заключающийся в том, что вычисляют отклонения носовой и кормовой точек буксируемого судна от линии диаметральной плоскости (ДП) буксирующего судна, при этом линия ДП проведена через носовую и кормовую точки буксирующего судна, по результатам вычислений определяют величину сигнала управления, в соответствии с его значением производят перекладку руля на буксируемом судне.
Известен также патент РФ на изобретение №2130622 (МПК G01S 5/12, опублик. 20.05.1999). Способ групповой навигации объектов путем приема и обработки радионавигационных сигналов спутниковой радионавигационной системы (СРНС) и корректирующей информации (КИ) контрольно-корректирующей станции (ККС), в котором вводят дополнительно два вспомогательных объекта навигации (ВОН) таким образом, чтобы основной объект навигации (ООН) находился внутри треугольника, образованного ККС и двумя ВОН, формируют на ККС управляющий радиосигнал, задающий номера только тех навигационных ИСЗ (НИСЗ) СРНС, которые одновременно находятся в зоне видимости ККС, ООН и ВОН, причем количество заданных НИСЗ выбирают не менее трех и не более числа измерительных каналов каждого из приемоиндикаторов ООН и ВОН, принимают управляющий радиосигнал на ООН и ВОН, осуществляют одновременно поиск, прием и обработку радионавигационных сигналов только заданных в управляющем радиосигнале НИСЗ, затем вычисляют на ООН и ВОН собственные координаты, формируют на ВОН дополнительную КИ (ДКИ), включающую известные и вычисленные координаты ВОН, затем передают ДКИ на ООН, где одновременно принимают КИ с ККС и ДКИ с ВОН, вычисляют коэффициенты d1, d2, d3 путем решения системы линейных уравнений.
Известен также патент РФ на изобретение №2662297 (МПК G05D 1/02, опублик. 25.07.2018). Способ группового вождения дорожных дронов, в котором периодически излучают электромагнитные, преимущественно радиочастотные, сигналы, излучают два рода акустических, преимущественно ультразвуковых, сигналов, первый из которых возбуждают одновременно с каждым электромагнитным сигналом, принимают электромагнитные и акустические сигналы, определяют расстояния от излучателя акустических сигналов до двух датчиков акустических сигналов по временным задержкам их приема относительно соответствующих электромагнитных сигналов и автоматически управляют курсом движения каждого дорожного дрона по предварительно формируемым сигналам рассогласования.
Известен также патент РФ на изобретение №2615714 (МПК Н04В 7/24, опублик. 07.04.2017). Способ группового управления мобильными наземными и воздушными робототехническими средствами, обеспечивающий управление роботами по радиоканалам и спутниковому каналу связи. За счет адаптации команд управления под оборудование робототехнических средств осуществляют управление робототехническими средствами с любого рабочего места оператора или с двух рабочих мест одновременно, где соответственно один оператор управляет базовым мобильным шасси робототехнического средства, а другой оператор технологическим оборудованием этого робототехнического средства, а также в зонах отсутствия радиовидимости в качестве внешних ретрансляторов радиоканала используют сами робототехнические средства, входящие в состав группировки.
Известен также патент РФ на изобретение №2794384 (МПК В63Н 25/04, G05D 1/02, G08G 3/02, В63В 35/66, H04L 67/00, опублик. 17.04.2023), являющийся по совокупности существенных признаков наиболее близким к предлагаемому решению, соответственно, принятый за прототип предлагаемого способа. Система управления движением буксира портового флота в режиме дистанционного пилотирования, характеризующаяся наличием обзорно-поисковой системы буксира ОПС, подсистемы внутрисудового наблюдения буксира ПВН, системы высокоточной проводки и швартовки буксира СВПШ, гидроакустической системы позиционирования буксира ГСП, автономной навигационной системы АНС буксира, системы координированного управления движением буксира СКУ, судовой интегрированной системы управления ИСУ технических средств ТС буксира, которые связаны с сетевым маршрутизатором буксира, система координированного управления движением буксира СКУ связана с преобразователем сигналов судовых исполнительных устройств буксира, который в свою очередь связан с судовой ИСУ ТС буксира, сетевой маршрутизатор буксира передает полученные данные от вышеупомянутых систем через криптошлюз буксира по основному и/или резервному каналам обмена данными с постом дистанционного управления ДУ через береговой криптошлюз в береговой сетевой маршрутизатор, который связан с сервером оптической системы анализа окружающей среды и состояния судна ОСА комплексного рабочего места КРМ удаленного капитана буксира, сервером автономной навигационной системы АНС КРМ удаленного капитана буксира, сервером системы детальной регистрации данных и подсистемы самодиагностики СДРПС, системы мониторинга доступности и контроля СМК, системы контроля и управления доступом СКУД, вычислителем СКУ, информационным сервером а-Навигации, картографическим сервером а-Навигации, гидрометеорологическим сервером а-Навигации КРМ удаленного капитана буксира, обеспечивающего дистанционное управление буксиром, связано с береговым сетевым маршрутизатором, который перенаправляет упомянутому КРМ все необходимые данные, при этом криптошлюз внешних источников информации ВИИ, связанный с береговым сетевым маршрутизатором, получает дополнительные данные по линии передачи данных от портовой системы управления движением судов СУДС и линии передачи данных глобальной сети INTERNET.
Известная система управления обеспечивает возможность дистанционного управления только одним буксиром, не предусматривает координированное управление группой буксиров и не учитывает взаимное расположение буксиров группы и буксируемого судна, характеристики буксируемого судна, определяющие его гидродинамические и аэродинамические свойства, а также гидрометеорологические условия проведения буксирно-кантовочной операции.
Главной технической проблемой в рассматриваемой сфере является отсутствие способа координированного управления группой буксиров, дистанционно управляемых с одного поста дистанционного управления (ПДУ), далее именуемых буксирами-автоматами (БА), предусматривающего автоматическое распределение между БА группы упоров, формируемых движительно-рулевыми устройствами каждого БА, с целью обеспечения требуемого линейного перемещения и вращения буксируемого судна с учетом гидрометеорологических условий. Предлагаемое техническое решение нацелено на решение названной проблемы.
Техническим результатом является улучшение характеристик способа дистанционного управления координированной групповой деятельностью буксиров-автоматов, а именно, обеспечение возможности автоматического распределения упоров буксиров-автоматов группы из двух БА.
При этом используемая эффективная мощность главных двигателей буксиров-автоматов соответствует минимально необходимой для обеспечения буксировки, швартовки и кантовки конкретного судна, находящегося в жесткой технологической сцепке с буксирами группы, в текущей гидрометеорологической обстановке.
Достигается технический результат тем, что в способе управления координированной групповой деятельностью буксиров-автоматов, основанном на взаимодействии берегового поста дистанционного управления с полностью автономными буксирами-автоматами, выполняющими буксировку и кантовку судна с характеристиками, неизвестными до начала буксирно-кантовочной операции и учитывающем гидрометеорологические условия ее проведения, согласно изобретению, один буксир-автомат в группе назначается ведущим, второй - ведомым, система координированного управления движением ведущего буксира по каналу обмена данными с поста дистанционного управления получает с операторской станции управляющие сигналы, которые обрабатываются в вычислительном устройстве системы координированного управления ведущего буксира-автомата. Далее вычисляются требуемые для заданного персоналом поста дистанционного управления линейного перемещения и вращения буксируемого судна направления и модули векторов сил, которые должны быть приложены к буксируемому судну каждым из буксиров группы. Вычисленные значения по внутрисудовой линии связи передаются в систему автоматического управления движением и маневрированием ведущего буксира, и по каналу обмена данными с постом дистанционного управления в систему автоматического управления движением и маневрированием ведомого буксира, сформированные системами автоматического управления движением и маневрированием буксиров группы управляющие сигналы передаются на движительно-рулевые устройства буксиров. При этом контроль соответствия направления и скорости линейного перемещения и вращения буксируемого судна требуемым значениям осуществляется внешним экипажем ведущего буксира-автомата с использованием данных, отображаемых на дисплее операторской станции поста дистанционного управления. В результате вычислений, выполняемых на ведущем буксире для буксиров группы, используемая эффективная мощность главных двигателей буксиров-автоматов соответствует необходимой для обеспечения буксировки, швартовки и кантовки судна с характеристиками, информация о которых становится известной непосредственно перед началом буксировочной/швартовной операции, находящегося в жесткой технологической сцепке с буксирами группы, в текущей гидрометеорологической обстановке. При этом обеспечивается автоматическое распределение между буксирами-автоматами группы упоров, формируемых движительно-рулевыми устройствами каждого буксира, с целью обеспечения требуемого линейного перемещения и вращения буксируемого судна.
Математическое объяснение предлагаемого способа:
Для управления линейным перемещением и вращением буксируемого судна буксиры группы создают суммарный вектор силы FS, которую необходимо приложить к буксируемому судну для его линейного перемещения, и момент MS, обеспечивающий требуемое вращение буксируемого судна. Распределение сил, обеспечиваемых упорами ведущего БА FT1 и ведомого БА FT2, и создающих требуемые значения FS и MS, между буксирами группы выполняется в СКУ ведущего буксира.
Вектор FS равен сумме векторов сил, развиваемых движительно-рулевыми устройствами ведущего БА FT1 и ведомого БА FT2:

Результирующая сила FS должна воздействовать на судно, смещая его в требуемом направлении COGSD.
Момент MS равен сумме векторных произведений радиус-векторов плеч LT1 и LT2 и векторов сил FT1 и FT2:

Модули радиус-векторов плеч определяются взаимным расположением буксиров группы и буксируемого судна и вычисляются по формулам (3) и (4):


где
Р1=ΔХ1 ⋅ cos(HDGS) + ΔY1 ⋅ sin(HDGS) - ΔХ'1 cos (HDGS+0,5⋅π)
Q1=ΔYX ⋅ cos(HDGS) - ΔХ1 ⋅ sin(HDGS) - ΔХ'1 ⋅ cos (HDGS+0,5⋅π)
Р2=ΔХ2 ⋅ cos(HDGS) + ΔY2 ⋅ sin(HDGS) - ΔХ'2 cos (HDGS+0,5⋅π)
Q2=ΔYX ⋅ cos(HDGS) - ΔХ2 ⋅ sin(HDGS) - ΔХ'2 ⋅ cos (HDGS+0,5⋅π)
HDGS - курс буксируемого судна
β1 - курсовой угол направления действия силы FT1, отсчитывается от диаметральной плоскости буксируемого судна, положительное значение соответствует правому борту, отрицательное - левому
β2 - курсовой угол направления действия силы FT2, отсчитывается от диаметральной плоскости буксируемого судна, положительное значение соответствует правому борту, отрицательное - левому


Δβ - половина угла между векторами F-n и Fx2
ΔХ1 - кратчайшее расстояние между диаметральной плоскостью буксируемого судна и опорной точкой ведущего буксира, положительное значение соответствует положению буксира у правого борта, отрицательное - у левого
ΔХ2 - кратчайшее расстояние между диаметральной плоскостью буксируемого судна и опорной точкой ведомого буксира, положительное значение соответствует положению буксира у правого борта, отрицательное - у левого
ΔX'1 - кратчайшее расстояние между диаметральной плоскостью буксируемого судна и точкой прикрепления ведущего буксира к борту с использованием магнитного швартовного устройства, положительное значение соответствует положению буксира у правого борта, отрицательное - у левого
ΔХ'2 - кратчайшее расстояние между диаметральной плоскостью буксируемого судна и точкой прикрепления ведомого буксира к борту с использованием магнитного швартовного устройства, положительное значение соответствует положению буксира у правого борта, отрицательное - у левого
ΔY1 - кратчайшее расстояние между плоскостью мидель-шпангоута буксируемого судна и опорной точкой ведущего буксира, положительное значение соответствует положению буксира впереди миделя, отрицательное - позади
ΔY2 - кратчайшее расстояние между плоскостью мидель-шпангоута буксируемого судна и опорной точкой ведомого буксира, положительное значение соответствует положению буксира впереди миделя, отрицательное - позади
Требуемое линейное перемещение и вращение буксируемого судна задается в ПДУ величинами ψ, γ, α и ε, при этом значение FS определяется величинами ψ и γ, а значение MS определяется величинами α и ε.
При дистанционном координированном управлении величины ψ, γ, α и ε задаются внешним экипажем ведущего буксира группы с использованием джойстика на панели управления операторской станции в ПДУ, при этом:
- величина ψ соответствует углу отклонения грифа джойстика от вертикальной оси и задает модуль вектора FS;
- величина γ соответствует направлению наклона грифа джойстика и задает направление вектора FS COGSD;
- величина α соответствует направлению поворота грифа джойстика вокруг вертикальной оси (вправо-влево) и задает направление вращения буксируемого судна, т.е. направление вектора момента силы MS;
- величина ε соответствует углу поворота грифа джойстика вокруг вертикальной оси и задает величину момента, вращающего буксируемое судно, т.е. модуль вектора момента силы MS.
Буксиры размещаются у борта буксируемого судна симметрично плоскости мидель-шпангоута, т.е. |ΔY1| = |ΔY2| и sgnΔY1 ≠ sgnΔY2.
Расчет векторов FT1 и FT2 состоит в определении их модулей FT1 и FT2 и направлений β1 и β2.
Расчет модулей векторов FT1 и FT2
Буксиры развивают одинаковые усилия, т.е. модули сил FT1 и FT2, обеспечиваемые упорами БА, равны. Величины этих модулей определяются соотношением углов наклона ψ и поворота ε джойстика и рассчитываются по формуле (5).

где
ψmax - максимальный угол отклонения грифа джойстика от вертикальной оси
εmax - максимальный угол поворота грифа джойстика вокруг вертикальной оси
FSD - значение модуля силы, которая должна быть приложена к буксируемому судну для преодоления гидродинамического сопротивления, обусловленного движением судна с требуемой скоростью, и аэродинамического воздействия ветра.
Расчет направлений FT1 и FT2
Для обеспечения движения буксируемого судна с требуемым путевым углом направления приложения сил β1 и β2 должны быть симметричны относительно требуемого вектора линейного перемещения судна (заданного путевого угла) COGSD и отстоять от него на величину ±Δβ.
β1=COGSD - HDGS+α⋅η⋅Δβ
β2=COGSD - HDGS - α⋅η⋅Δβ
Δβ1=p00



ΔX=ΔX1=ΔX2
ΔY=ΔY1=ΔY2
Расчет FSD
Величина FSD определяется как сумма модулей векторов гидродинамического сопротивления подводной части корпуса буксируемого судна, обусловленной линейным перемещением судна FHL и вращением судна FHR, и модулей векторов аэродинамической силы, обусловливающей линейное перемещение буксируемого судна FWL и его вращение FWR под воздействием ветра, умноженная на повышающий коэффициент kFSD, учитывающий неопределенность и неточность данных о характеристиках буксируемого судна kFSD∈(1,10;1,30): 

CX0 - коэффициент сопротивления воды движению судна при нулевом угле дрейфа, принимается значение CX0=0,037 [1]
CYβ=0,5Cβγβ sin2β cosβ+c2sin2β+c3sin42β

ρW - плотность воды
STWC - скорость буксируемого судна относительно воды, значение совпадает со скоростью ведущего буксира относительно воды, получаемой от навигационного оборудования ведущего буксира
ALб - приведенная площадь погруженной части диаметральной плоскости буксируемого судна.
LS - длина буксируемого судна по действующей ватерлинии
BS - ширина буксируемого судна по действующей ватерлинии
TMS - осадка буксируемого судна на миделе;


где LT1 и LT2 - модули радиус-векторов плеч, определяемые взаимным расположением буксиров группы и буксируемого судна и вычисляемые по формулам (3) и (4)

где
CMβ=m1 sin2β+m2sinβ+m3sin32β+m4sin62β

m3=0,022 - 0,0063δS

ROTC - текущая измеренная угловая скорость вращения судна относительно воды, значение совпадает со скоростью вращения ведущего буксира относительно воды, получаемой от навигационного оборудования ведущего буксира;
ALδ - приведенная площадь погруженной части диаметральной плоскости судна, рассчитывается с использованием следующего математического соотношения: ALδ = LSTMS δS, где δS - коэффициент общей полноты корпуса буксируемого судна.

где
CAX=0,3-0,19 |γR|, γR задается в радианах
CAY=1,05 |sin γR|
AVB - площадь проекции надводной части буксируемого судна на плоскость мидель-шпангоута;
AVL - площадь проекции надводной части буксируемого судна на диаметральную плоскость;
ρA - плотность воздуха;
νR - скорость кажущегося ветра

SOGC - текущая скорость ведущего буксира относительно грунта, получается от навигационного оборудования ведущего буксира
νWC - скорость истинного ветра, полученная от гидрометеорологического сервера а-Навигации
γWC - направление истинного ветра, полученное от гидрометеорологического сервера а-Навигации
γR - направление кажущегося ветра




η - относительное отстояние центра парусности боковой поверхности надводной части буксируемого судна от мидель-шпангоута, принимается положительной, если центр парусности располагается в нос от мидель-шпангоута, и отрицательной при расположении центра парусности в противоположном направлении:
Предложенный алгоритм определения величин и направлений приложения сил, развиваемых упорами буксиров группы для вращения и линейного перемещения буксируемого судна, обеспечивает адекватное реагирование на вращение и наклон грифа джойстика: направление вращения судна соответствует задаваемому, с увеличением угла поворота грифа модуль вращающего момента растет, направление перемещения судна соответствует задаваемому, с увеличением угла наклона грифа модуль силы растет.
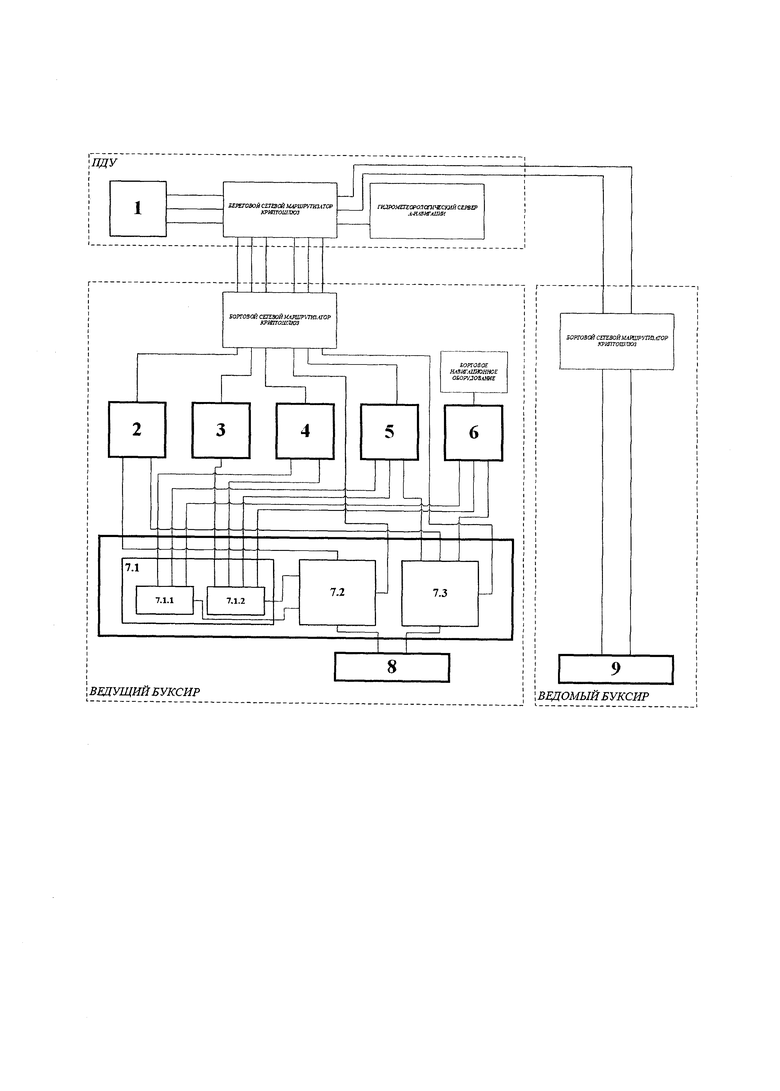
Сущность предлагаемого способа поясняется следующим графическим материалом, представленным на фиг., где:
1 - операторская станция, оснащенная манипулятором типа джойстик,
2 - блок приема данных положения джойстика,
3 - блок приема метеоданных,
4 - блок приема данных о судне,
5 - блок приема данных о взаимном положении ведущего и ведомого буксиров-автоматов и судна,
6 - блок приема навигационных данных,
7 - вычислитель системы координированного управления (СКУ) ведущего буксира,
7.1 - блок расчета FSD, включающий субблок расчета 7.1.1 векторов FHL и FHR и субблок расчета 7.1.2 векторов FWL и FWR,
7.2 - блок расчета FT1 и FT2,
7.3 - блок расчета β1 и β2,
8 - САУДиМ ведущего буксира,
9 - САУДиМ ведомого буксира.
С Операторской станции 1 по каналу обмена данными с постом дистанционного управления через береговой и бортовой сетевые маршрутизаторы передаются: на вход Блока приема данных о положении джойстика 2 данные о положении джойстика, задающие требуемые параметры перемещения и вращения буксируемого судна, на вход Блока приема данных о судне 4 данные о буксируемом судне, необходимые и достаточные для расчета величин развиваемых буксирами упоров, на вход Блока приема данных о взаимном положении БА и судна 5 данные о координатах буксиров относительно судна, из гидрометеорологического сервера а-навигации по каналу обмена данными с постом дистанционного управления через береговой и бортовой сетевые маршрутизаторы на вход Блока приема метеоданных 3 передаются данные о направлении и скорости истинного ветра, от бортового навигационного оборудования ведущего буксира на вход Блока приема навигационных данных 6 поступают параметры движения ведущего буксира, на первый вход субблока расчета FHL и FHR 7.1.1 из Блока 4 подаются данные о буксируемом судне, на второй вход субблока 7.1.1 из Блока 5 подаются данные о взаимном положении буксиров и судна, на третий вход субблока 7.1.1 из Блока 6 подаются текущие величины курса, скорости и путевого угла ведущего буксира, на первый вход субблока расчета FWL и FWR 7.1.2 из Блока 4 подаются данные о буксируемом судне, на второй вход субблока 7.1.2 из Блока 5 подаются данные о взаимном положении буксиров и судна, на третий вход субблока 7.1.2 подаются текущие величины курса, скорости и путевого угла ведущего буксира, на четвертый вход субблока 7.1.2 из Блока 3 подаются метеоданные, на первый вход Блока расчета FT1 и FT2 7.2 с выхода субблока 7.1.1 подаются результаты расчета FHL и FHR, на второй вход Блока 7.2 с выхода субблока 7.1.2 подаются результаты расчета FWL и FWR, на третий вход Блока 7.2 с выхода Блока 2 подаются данные об углах наклона и поворота грифа джойстика, на первый вход Блока расчета β1 и β2 7.3 с выхода Блока приема навигационных данных 6 подаются текущие величины курса, скорости и путевого угла ведущего буксира, на второй вход Блока 7.3 с выхода Блока 2 подаются данные об углах наклона и поворота грифа джойстика, на третий вход Блока 7.3 с выхода Блока 5 подаются данные о взаимном положении буксиров, с первого выхода Блока 7.2 на первый вход Блока 8 поступают результаты расчета модуля вектора силы, который должны обеспечить упоры ведущего буксира, с первого выхода Блока 7.3 на второй вход Блока 8 поступают результаты расчета направления вектора силы, который должны обеспечить упоры ведущего буксира, со второго выхода Блока 7.2 по каналу обмена данными с постом дистанционного управления через береговой и бортовые сетевые маршрутизаторы на первый вход Блока 9 поступают результаты расчета модуля вектора силы, который должны обеспечить упоры ведомого буксира, со второго выхода Блока 7.3 по каналу обмена данными с постом дистанционного управления через береговой и бортовые сетевые маршрутизаторы на второй вход Блока 9 поступают результаты расчета направления вектора силы, который должны обеспечить упоры ведущего буксира.
В способе один буксир-автомат в группе назначается ведущим, второй - ведомым, система координированного управления движением ведущего буксира по каналу обмена данными из поста дистанционного управления получает с операторской станции 1 управляющие сигналы, которые обрабатываются в вычислительном устройстве 7 системы координированного управления ведущего буксира-автомата, далее вычисляются требуемые для заданного линейного перемещения и вращения буксируемого судна направления и модули векторов сил, которые должны быть приложены к буксируемому судну каждым из буксиров группы, вычисленные значения по внутрисудовой линии связи передаются в систему 8 автоматического управления движением и маневрированием ведущего буксира (САУДиМ1) и по каналу обмена данными с ПДУ в систему 9 автоматического управления движением и маневрированием ведомого буксира (САУДиМ2), сформированные САУДиМ1 и САУДиМ2 управляющие сигналы передаются на движительно-рулевые устройства буксиров группы. Контроль соответствия направления и скорости линейного перемещения и вращения буксируемого судна требуемым значениям осуществляется внешним экипажем ведущего БА с использованием данных, отображаемых на дисплее операторской станции в ПДУ.
В результате вычислений, выполняемых на ведущем буксире для буксиров группы, используемая эффективная мощность главных двигателей буксиров-автоматов соответствует необходимой для обеспечения буксировки, швартовки и кантовки судна, находящегося в жесткой технологической сцепке с буксирами группы, при этом информация о характеристиках буксируемого судна может быть получена непосредственно перед началом буксировочной/швартовной операции, и является достаточной в текущей гидрометеорологической обстановке, при этом обеспечивается автоматическое распределение между буксирами-автоматами группы упоров, формируемых движительно-рулевыми устройствами каждого буксира, с целью обеспечения требуемого линейного перемещения и вращения буксируемого судна.
Таким образом, благодаря предлагаемому изобретению достигается возможность дистанционного координированного управления группой полностью автономных буксиров-автоматов в процессе выполнения буксирно-кантовочных операций, связанных с постановкой судна с априорно неизвестными гидродинамическими и аэродинамическими свойствами к причалу морского и речного порта и обеспечением отхода от причала, при этом эффективная мощность главных двигателей буксиров-автоматов рассчитывается в соответствии с характеристиками буксируемого судна и текущими гидрометеорологическими условиями.
Источники информации
1. Справочник по теории корабля. Под ред. Я.И. Войткунского. Том. 3. Ленинград: Судостроение. 1985.
2. Токарев П.А. Метод определения гидродинамических усилий на корпусе судна при произвольном плоском движении. Вестник ВГАВТ, выпуск 52, 2017 г., с. 191-205.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Система управления техническими средствами и движением МАНС | 2023 |
|
RU2825914C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ ПЕРЕДАЧИ КОММУНИКАЦИЙ НА АВАРИЙНЫЙ ПЛАВУЧИЙ ОБЪЕКТ ПРИ ПРОВЕДЕНИИ АВАРИЙНО-СПАСАТЕЛЬНЫХ РАБОТ В СЛОЖНЫХ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2023 |
|
RU2817156C1 |
| Способ управления движением буксирной системы | 2015 |
|
RU2615846C1 |
| ШВАРТОВНЫЙ ЗАХВАТНЫЙ МОДУЛЬ (варианты) | 2023 |
|
RU2808875C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ЛЬДА АЙСБЕРГОВ ДЛЯ ПОЛУЧЕНИЯ ПИТЬЕВОЙ ВОДЫ ИЗ НЕГО | 2004 |
|
RU2281878C2 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
Изобретение относится к способу управления координированной групповой деятельностью буксиров-автоматов. Для буксирно-кантовочной операции используются полностью автономные буксиры-автоматы под управлением берегового поста дистанционного управления с учетом гидрометеорологических условий ее проведения, при этом один буксир-автомат в группе назначается ведущим, второй – ведомым. С поста дистанционного управления передают управляющие сигналы, которые обрабатываются в вычислительном устройстве ведущего буксира-автомата для формирования соответствующих команд для его системы управления и маневрирования, а также для формирования и передачи соответствующих команд в систему управления и маневрирования ведомого буксира для обеспечения необходимых условий для буксировки, швартовки и кантовки судна. Обеспечивается улучшение характеристик способа дистанционного управления координированной групповой деятельностью буксиров-автоматов за счет обеспечения возможности автоматического распределения упоров буксиров-автоматов группы. 1 ил.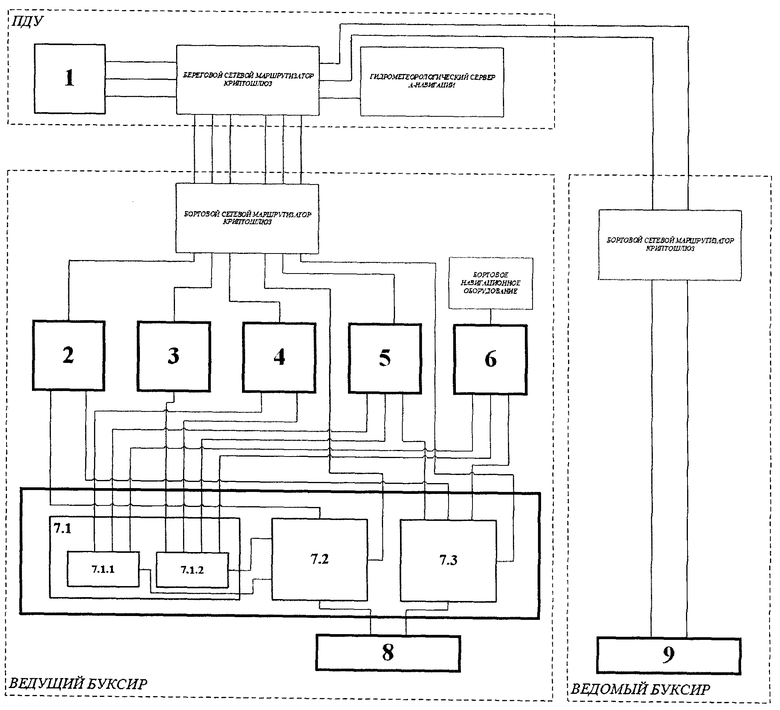
Способ управления координированной групповой деятельностью буксиров-автоматов, основанный на взаимодействии берегового поста дистанционного управления с полностью автономными буксирами-автоматами, выполняющими буксировку и кантовку судна с характеристиками, неизвестными до начала буксирно-кантовочной операции и учитывающими гидрометеорологические условия ее проведения, отличающийся тем, что один буксир-автомат в группе назначается ведущим, второй - ведомым, система координированного управления движением ведущего буксира по каналу обмена данными с поста дистанционного управления получает с операторской станции управляющие сигналы, которые обрабатываются в вычислительном устройстве системы координированного управления ведущего буксира-автомата, далее вычисляются требуемые для заданного персоналом поста дистанционного управления линейного перемещения и вращения буксируемого судна направления и модули векторов сил, которые должны быть приложены к буксируемому судну каждым из буксиров группы, вычисленные значения по внутрисудовой линии связи передаются в систему автоматического управления движением и маневрированием ведущего буксира и по каналу обмена данными с постом дистанционного управления в систему автоматического управления движением и маневрированием ведомого буксира, сформированные системами автоматического управления движением и маневрированием буксиров группы управляющие сигналы передаются на движительно-рулевые устройства буксиров, при этом контроль соответствия направления и скорости линейного перемещения и вращения буксируемого судна требуемым значениям осуществляется внешним экипажем ведущего буксира-автомата с использованием данных, отображаемых на дисплее операторской станции поста дистанционного управления, а в результате вычислений, выполняемых на ведущем буксире для буксиров группы, используемая эффективная мощность главных двигателей буксиров-автоматов соответствует необходимой для обеспечения буксировки, швартовки и кантовки судна с характеристиками, информация о которых становится известной непосредственно перед началом буксировочной/швартовной операции, находящегося в жесткой технологической сцепке с буксирами группы, в текущей гидрометеорологической обстановке, при этом обеспечивается автоматическое распределение между буксирами-автоматами группы упоров, формируемых движительно-рулевыми устройствами каждого буксира, с целью обеспечения требуемого линейного перемещения и вращения буксируемого судна.
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| EP 3647177 B1, 28.06.2023 | |||
| CA 3094572 A1, 31.10.2019 | |||
| EP 1177462 B1, 01.02.2006. | |||

