. rije -..„-.
,
Изобретение относится к подъемно- транспортному машиностроению, в частности к перемещению изделий по вертикали, и может быть использовано в машиностроительной, приборостроительной областях народного хозяйства.
Цель изобретения - повышение надежности.
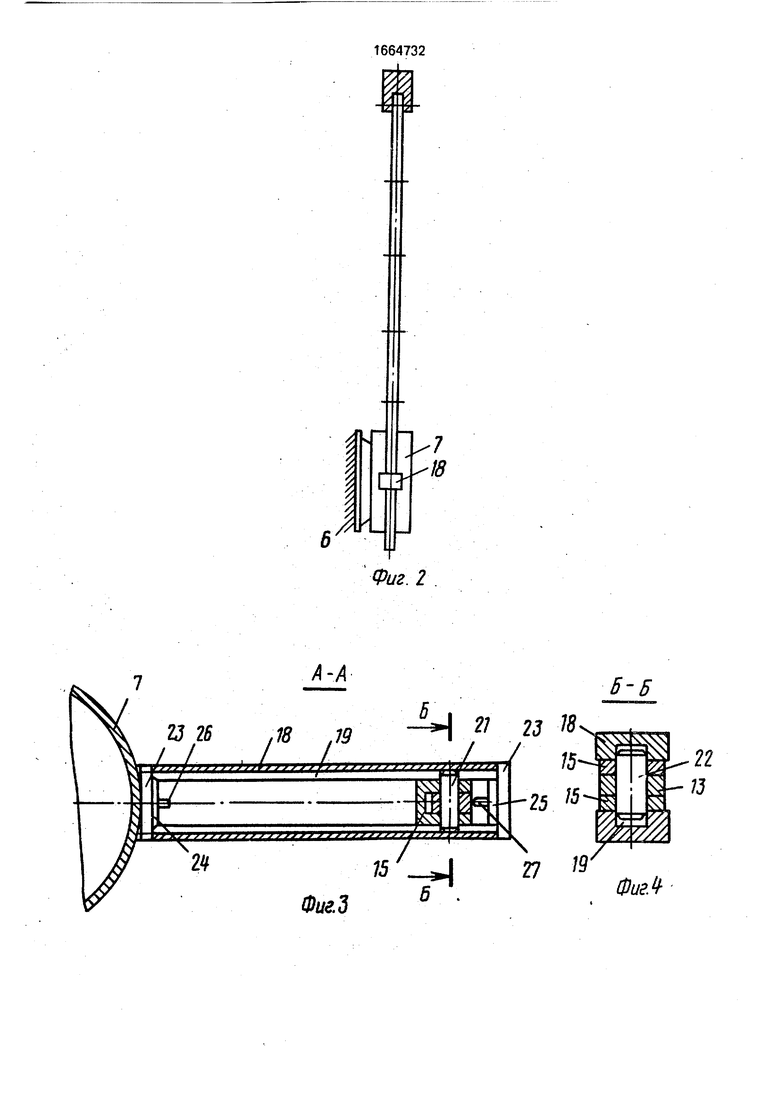
На фиг. 1 показан подъемник, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3.
Подъемник содержит систему шарнир- но-соединенных рычагов 4 типа нюрнбергских ножниц, расположенных в виде параллелограммов, установленную на вершине верхнего параллелограмма платформу 5, вертикально установленное основание 6, на котором закреплен привод, выполненный в виде силового цилиндра 7 с поршнями 8 и 9 и выдвижных штоков 10 и 11. Силовой цилиндр 7 размещен на основании 6 по диагонали параллелограмма, образованного рычагами 12 и 13, и дополнительными рычагами 14 и 15, а его штоки 10 и 11 соединены С1 центральными шарнирами 16 и 17 перекрещивающихся рычагов 12 и 13 и дополнительных рычагов 14 и 15. На корпусе силового цилиндра 7 закреплены горизонтальные направляющие, выполненные в виде параллельных пластин 18, на внутренней поверхности которых выполнены продольные пазы 19, в которых размещены шарниры 20ч-и 21 с осью 22. Направляющие расположены перпендикулярно штокам 10 и 11. В каждой направляющей установлены распределители 3 для подвода воздуха в силовой цилиндр, которые расположены в торцах этих направляющих и включают клапаны 24 и 25 со штоками 26 и 27.
Подъемник работает следующим образом.
Подают сжатый воздух в полость между поршнями силового цилиндра 7 через цт- верстие, выполненное в его корпусе. Поршни 8 и 9 перемещаются в направлении один от другого и перемещают штоки 10 и 11. Штоки 10 и 11 воздействуют на шарниры 16 и 17 соответственно и перемещают их в вертикальном направлении. При этом оси 22 шарниров 20 и 21 перемещаются по параллельным продольным пазам направляющим пластин 18. Все рычаги рычажного механизма поворачиваются вокруг шарниров и, в том числе, вокруг шарниров 16 и 17, 20 и 21 соответственно. Платформа 5 перемещается вверх. Затем шарниры 20 и 21 воздействуют на штоки 26 клапана 24 средства для подачи воздуха, при этом штоки
выполнены регулируемыми по длине. Клапан 24 отключает полость, расположенную между поршнями силового цилиндра 7 от источника сжатого газа, и соединяет ее с
атмосферой. Одновременно клапаны 24
подают сжатый воздух в полости, расположенные за поршнями силового цилиндра 7. Поршни 8 и 9 перемещаются навстречу друг к другу. Платформа 5 перемещается вниз и
в конце перемещения шарниры 20 и 21 воздействуют на штоки 27. Клапаны 25 отключают полости, расположенные за поршнями силового цилиндра, от сети сжатого воздуха и соединяют их с атмосферой, а полость,
расположенную между поршнями,-ссетью сжатого воздуха. Затем цикл повторяется.
При необходимости регулирования величины вертикального хода платформы 5 регулируют длину штоков 26 и 27.
Формула изобретения
1.Подъемник, содержащий основание, подъемную платформу, перекрещивающиеся рычаги, центральными шарнирами связанные со средними частями, одни концы рычагов смонтированы с возможностью поворота и перемещения в горизонтальных направляющих основания, а другие связаны с платформой, и привод перемещения рычагов, содержащий силовой цилиндр, корпус которого вертикально закреплен на основании, а выдвижной шток связан с центральным шарниром, отличающийся тем, что, с целью повышения надежности, он
снабжен двумя дополнительными рычагами, а в силовом цилиндре размещены два поршня с двумя штоками, перемещаемыми в противоположных направлениях вдоль оси его корпуса, при этом один шток силового цилиндра шарнирно связан с центральным шарниром рычагов, а другой - шарнирно связанными между сооой одними концами дополнительных рычагов, другие концы которых порознь шарнирно связаны с одними
концами рычагов.
2.Подьемник по п. 1, отличающий- с я тем, что, с цел ью автоматического управления процессом возвратно-поступательного перемещения подъемной платформы, в местах крайнего положения концов рычагов, перемещаемых в направляющих основания, смонтированы распределители со штоками для поочередной подачи текучей
среды в различные рабочие полости силового цилиндра, соответствующие подъему или опусканию подъемной платформы, путем силового взаимодействия штоков с указанными рычагами.
ю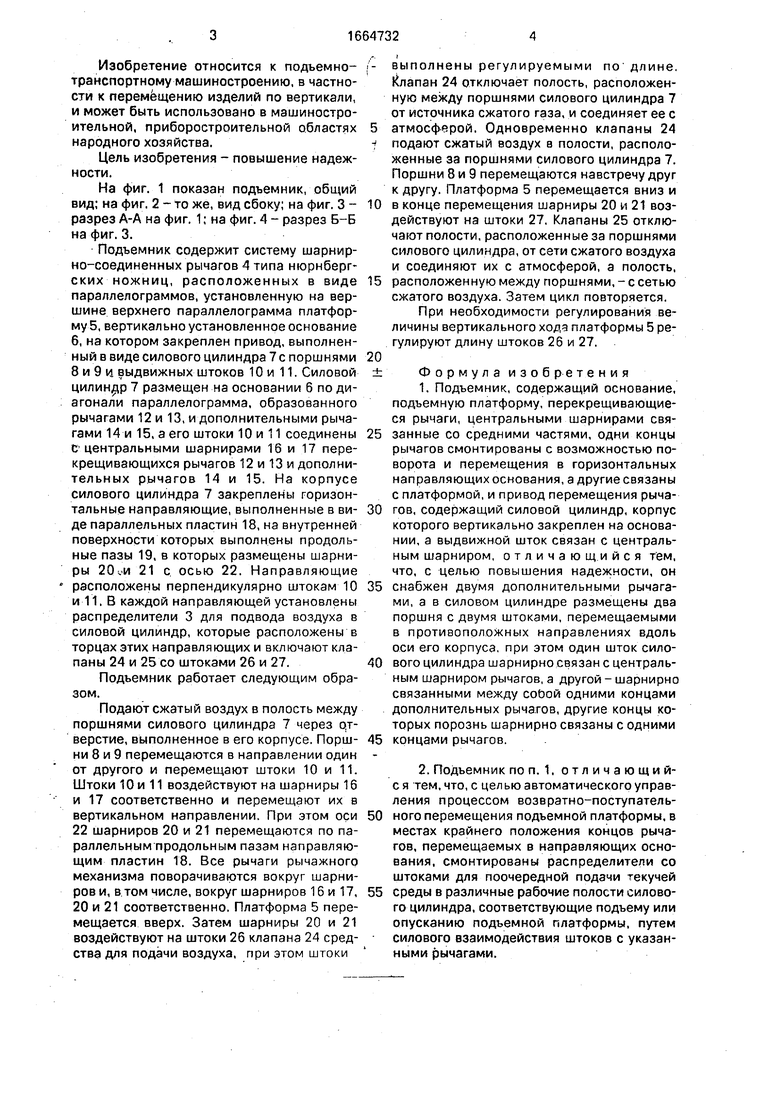
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2308412C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2004 |
|
RU2280007C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| Привод подъемника | 1987 |
|
SU1585285A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к перемещению изделий по вертикали, и может быть использовано в машиностроительной и приборостроительной отраслях народного хозяйства. Цель изобретения - повышение надежности подъемника. Подъемник содержит систему шарнирно-соединенных рычагов 1 - 4 типа нюрнбергских ножниц, расположенных в виде параллелограммов, установленную на вершине верхнего параллелограмма платформу 5, вертикально установленное основание 6, на котором закреплен привод, выполненный в виде силового цилиндра 7 с поршнями 8 и 9 и штоков 10 и 11. Силовой цилиндр 7 размещен на основании по диагонали параллелограмма, образованного рычагами 12 и 13 и дополнительными рычагами 14 и 15 а его штоки 10 и 11 соединены с противоположными шарнирами 16 и 17. На корпусе силового цилиндра закреплены горизонтальные направляющие 18 с пазами 19, в которых закреплены шарниры 20 и 21. В каждой направляющей установлены распределители 23 для подвода воздуха в силовой цилиндр 7. 2 з.п.ф-лы, 4 ил.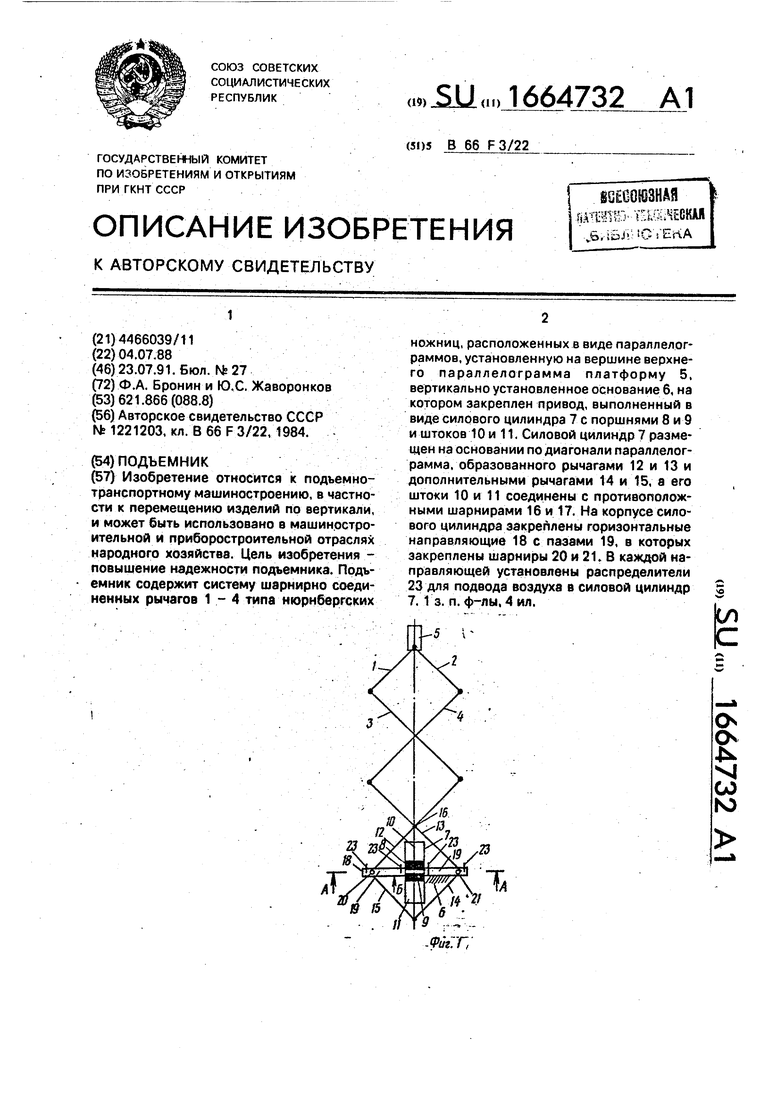
А-А
М
Фие.З
Фиг. 2
6-5
15
V W
Фиг. Ч
| Грузоподъемный стол | 1984 |
|
SU1221203A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
