Изобретение относится к аьтс татикр измерительной и вычислительной г- может быть использовано в КОНТРОЛЬ п ди агностических информаиипмнмх г не 4.413 например, для контроля дат и юв госттнич автоматизированной сипем безопасно сти обслуживаюицч го пррсотл и ьон поля загрязнения окружающей cpr-ды морских нефтегазопромысловнх
Цель изобретения - повышение доек- верности контроля чя ГЧРТ / ррднения ряемых параметров
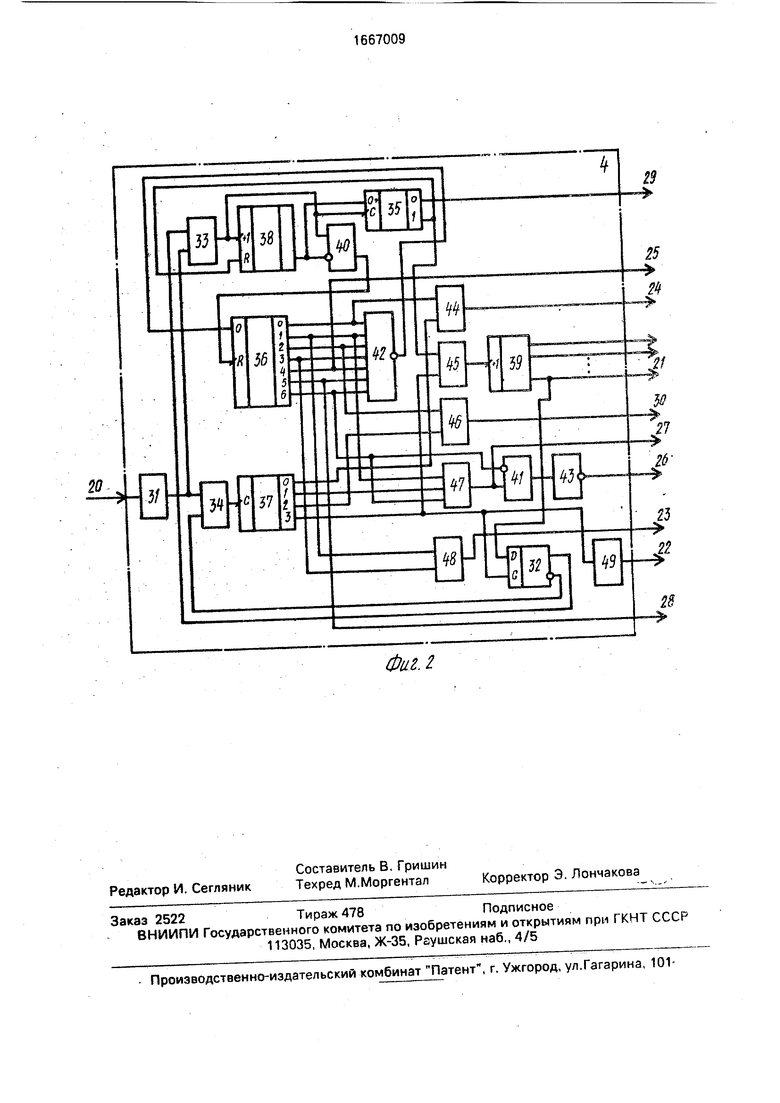
Нч фиг 1 изображена схема устройства }i онтроля параметров на фиг 2 - схема Ьп н ч управлении
Устройство для контроля параметров содержит (фиг 1) датчики 1, коммутатор 2, Гчок 3 памяти уставок блок 4 упрарпрнил пгпчни и и второй 6 регистры, первую 7 п вшрую 8 схемы сравнения, первый о и fn рои 10 магистральные передатчики, б шк 1 i элементов ИЛИ, бпок 12 элементен 1А nPF-T, сумматор-чычитатель 1. регистр 14 сдвига первый 15 и второй 16 блоки э
о
:сь
О
о
о
тов И. Устройство имеет установочный вход 17, выход 18, сигнализирующий о превышении единичного измерения параметра допустимого уровня, выход 19, сигнализирующий о превышении усредненной оценки параметра допустимого уровня. На фиг 1 также обозначены вход 20 запуска блока 4 управления и его первый 21, второй 22, третий 23, четвертый 24, пятый 25, шестой 26, седьмой 27, восьмой 28, девятый 29 и десятый 30 выходы.
Блок 4 управления (фиг. 2) содержит управляемый генератор 31 импульсов, триггер 32, первый 33 и второй 34 элементы И, первый 35, второй 36 и третий 37 распределители импульсов, первый 38 и второй 39 счетчики, первый 40 и второй 41 элементы ЗАПРЕТ, элемент ИЛИ-НЕ 42, элемент НЕ 43, первый 44, второй 45, третий 46, четвертый 47 и пятый 48 элементы ИЛИ, элемент 49 задержки.
Метод, реализованный в предлагаемом устройстве, подтверждается следующими теоретическими предпосылками.
Известно, что при выполнении измерительного процесса контролируемых парао
метров, случайные Аи систематические Ас погрешности проявляются одновременно
Д А + Дс.
о
Поскольку Л равна разности между отдельными результатом измерения и истинным значением измеряемой величины, ХИст неизвестно, так как . непосредственно определить невозможно. Необходимо за наиболее вероятное значение измеряемой величины X принимать такое ее значение А, при котором сумма квадратов абсолютных погрешностей минимальна.
Таким образом, для п измерений X и полученных значений ai, агап и исключенных систематических погрешностях. выражение для абсолютной погрешности записывается в виде
Ai - ai - XДп ап - X .
Отсюда, наиболее вероятное значение измеряемой величины определяется в соответствии с выражением:
A-j-i «-Х,
п,,
чср
Установление необходимого количества п (представительности выборки) измерений для повышения достоверности выработки информации и точности за счет приближения измеряемой величины к ее истинному значению производится при неизвестном значении среднего квадратического отклонения характеристики погрешности по формуле
N/(4b2 N+t2),(1)
где N - число измерительных каналов
(датчиков), составляющих генеральную совокупность; t - коэффициент Стьюдента, определяемый в зависимости от доверительной вероятности при нормальном законе распределения погрешности; b - допустимая погрешность репрезентативности, определяемая по данным опытной эксплуатации устройства в реальных условиях объекта или по данным заказчика.
Представленная группа измерительных
каналов рассматривается как самостоятельная генеральная совокупность. По данным эксплуатации погрешность репрезентативности должна гарантироваться с вероятностью ,954.
По заданной вероятности коэффициент Стьюдента t 2. Так как среднее квадратическое отклонение д неизвестно, в соответствии с формулой (1) находим необходимое количество представительной выборки измерений
50
33 .
4,0 -0.12 -50 +22 Данная выборка удовлетворительной Q степенью приближения хорошо реализуется в двоичной системе счисления разрядностью, равной 5, т.е. ,
Устройство для контроля параметров датчиков работает следующим образом. 5 Перед работой устройства производится начальная установка его элементов и узлов, в частности, очистка содержимого блока оперативной памяти, сброс всех регистров (цепи управления не показаны) и счет Q чика в блоке управления, причем исходное состояние счетчика соответствует первому адресу первого датчика.
Далее устройство для контроля параметров датчиков работает непрерывно в рее жимах калибровки датчиков (устранение аддитивной погрешности) и измерения, причем режимы выполняются последовательно и запускаются подачей сигнала с первого датчика на вход 20 запуска блока 4 п управления).
Рассмотрим работу устройства в каждом из режимов.
В режиме калибровки датчиков устройство работает следующим образом. 5 Сигнал с первого выхода 21 блока 4 управления инициирует первый адрес датчика 1, коммутатор 2 и блока 3 памяти уставок. Измеренное значение нулевого разбаланса первого датчика 1 (измерение в данном режиме производится в отсутствие рабочего
измеряемого параметра, т.е. при использовании, например, в качестве исследуемого параметра датчиков агрессивной среды при отсутствии самой агрессивной среды и т.д.) с его выхода поступает на информационный вход коммутатора 2, подключающего первый датчик 1 к информационному входу магистрального передатчика 9. Сигнал с выхода 24 блока управления вызывает запрет состояния высокого импеданса блока 9, разрешая прохождение цифрового кода измеренного значения нулевого разбаланса датчика 1 на вторые входы сумматора-вы- читателя 13, первые входы которого также обнулены. Блок 4 управления одновременно выдает с выходов 26 и 27 логические сигналы соответственно с О и 1, поступающие на первый и второй сигнальные входы сумматора-вычитателя 13 и инициирующие выполнение им операции вычитания. Результат вычитания с выходов сумматора-вычитателя 13 записывается в регистр 6, запись в который разрешается сигналом логической 1 с выхода 30 блока управления (в данном режиме регистр 6 служит для контрольной индикации оператору значений нулевого разбаланса датчика 1) Блоком 4 управления с выхода 22 выдается сигнал разрешения записи данных поступивших на вход сигнала данных блока 3 памяти уставок с датчика 1, по которому производится их запись в блок 3
На этом съем и обработка измеренной информации с первого датчика 1 прекращается и блок 4 управления с первого выхода 21 выдает адрес следующего датчика Далее цикл обработки данных в режиме повторяется. Таким образом, производится опрос всех датчиков 1 и установление значений нулевого разбаланса каждого датчика 1 с их записью в соответствующие ячейки блока 3 памяти уставок.
В режиме измерения устройство работает следующим образом.
Перед работой устройства производится предварительно запись в регистр 5 с установочного входа 17 устройства (цепи управления не показаны) максимального значения контролируемого датчиками параметра (граничного предела работг особ- ности датчика, выдачи сигнала аварийной ситуации и т.д.)
Блок 4 управления по первому выходу 21 инициирует адрес первого датчика 1. коммутатора 2 и блока 3 памяти уставок. Измеренное датчиком значение рабочего параметра через коммутатор 2 поступает на информационный вход магистрального передатчика 9, прохождение сигнала через который разрешается запретом состояния
высокого импеданса логической 1 с выхода 24 блока 4 управления. Блок 4 одновременно вы дает с выходов 26 и 27 логические сигналы соответственно О и 1, поступающие на соответствующие сигнальные входы сумматора-вычитателя 13 и подготавливающие выполнение им операции вычитания.
К этому времени значение нулевого раз0 баланса этого же датчика считывается из соответствующей ячейки блока 3 памяти уставок по сигналу с выхода 23 блока управления и, проходя через соответствующие элементы блока 11 элементов ИЛИ и
5 блока 12 элементов ЗАПРЕТ, подается на другой вход сумматора-вычитателя 13, который вычитанием производит определение нулевой точки отсчета сигнала по амплитуде с учетом значения нулевого разбаланса
0 датчика (установление динамического диапазона измерения). Затем после поступления разрешающего сигнала с выхода 30 блока управления производится запись разностной величины в регистр 6 с контрольной
5 индикацией ее оператору.
Блок 4 управления с выхода 23 выдает сигнал разрешения считывания информации из блока 3 памяти уставок и разрешает прохождение измеренного параметра через
0 блок 15 элементов И на соответствующий вход схемы 7 сравнения. На другой вход схемы 7 поступает с выхода регистра 5 максимальное значение контролируемого датчиками параметра. Схема 7 сравнения
5 производит сравнение поступивших величин и, в случае равенства либо превышения текущим значением рабочего параметра максимального значения на выходе схемы 7 появляется сигнал наличия аварийной си0 туации.
Таким образом, после появления соответствующего сигнала на выходе 23, блок управления выдачей сигнала с выхода 25 формирует режим параллельной обработки
5 информации: по рассмотренной ветви блока 15 и схемы 7 и ветви блоков 6, 10, 13, 14, 11, 12, 16 и схемы 8. Указанный сигнал в последнем случае вызывает запрет состояния высокого импеданса магистрального
0 передатчика 10, разрешая прохождение свободного от систематической погрешности измеренною значения параметра на одни входы сумматора-вычитателя 13.
В связи с произведенным предвари5 тельно обнулением содержимого регистра 14 сдвига, по сигналу с выхода 28 блока управления регистр 14 передает через соответствующие элементы блока 11 элементов ИЛИ и блока 12 элементов ЗАПРЕТ на другие входы сумматорэ-вычитателя фактически нулевое значение. Блок управления одновременно выдает с выходов 26 и 27 логические сигналы единиц, поступающих на сигнальные входы сумматора-вычитэ- теля 13 и инициирующих выполнение им операции сложения. Результат сложения записывается с выхода сумматора-вычита- теля 13 в регистр 14 при сохраненном сигнале на первом входе разрешения регистра, поступающим с выхода 28 блока управления.
Далее датчиком 1 по сохраненному адресу производится вновь измерение рабочего параметра, определение нулевой точки отсчета сигнала по амплитуде и запись в регистр 6 под управлением блока 4 идентично описанному ранее. Устройством для контроля параметров датчиков аналогично описанному производится также обработка сигналов блока 15 и схемой 7 с выдачей соответствующего тревожного сигнала по первому сигнальному выходу устройства и установка содержимого регистра 6 на одних входах сумматора-вычитателя 13.
Результат сложения (в данном случае первое слагаемое), хранимое в регистре 14 сдвига, под управлением блока 4 поступает на другие входы сумматора-вычитателя 13, которым производится очередное накапливание суммы значений измеренных за два такта рабочих параметров, свободных от систематических погрешностей. Результат сложения вновь записывается в регистр 14 сдвига,
Так происходит в течение заданного блоком управления количества тактов повторной обработки информации по адресу одного датчика (число выбранных тактов обусловлено количеством измерительных каналов, датчиков). После того как накопленная информация записана в регистре 14, блок 4 управления выдает с выхода 29 сигнал, поступающий на второй вход разрешения регистра 14 сдвига, по которому его содержимое сдвигается вправо на определенное число разрядов и поступает на первые входы элементов И блока 16 элементов И. (Для 50 датчиков сдвиг вправо осуществляется, например, на 5 разрядов). Этот же сигнал позволяет прохождение данных через блок 11 элементов И на первый вход схемы 8 сравнения, которым производится сравнение и, в случае равенства либо превышения значением приближенной оценки измеряемого датчиком параметра к ее истинному значению значения максимальной величины контролируемого датчиками параметра, по второму сигнальному выходу устройства для контроля параметров датчиков на внешнее устройство индикации и регистрации производится выдача тревожного сигнала.
Далее блок управления с выхода 21 выдает адрес следующего датчика 1.
Таким образом, устройство для контроля параметров датчиков с первого сигнального выхода выдает информацию о предварительной оценке уровня текущего значения контролируемого параметра на
0 фоне помех, со второго сигнального выхода - с результирующей приближенной к действительной оценке измеряемого параметра, по состоянию которой оператор окончательно судит о достоверности критической ситу5 ации.
Блок 4 у правления работает следующим образом.
В исходном состоянии счетчика 39 осуществляется выдача первого адреса датчи0 ков 1 на выходе 21 блока 4 управления. По сигналу с первого входа устройства, поступающему на пусковой вход 20 блока 4 управления, запускается управляемый генератор 31 импульсов, вырабатывающий последо5 вательность импульсов с частотой, определяемой распределителями импульсов Логическая 1 на инверсном выходе триггера 32 разрешает прохождение импульсов через элемент И 34 на вход распределителя
0 37 импульсов. С его первого выхода через элемент ИЛИ 44 единичный сигнал подается на выход 24 блока 4 со второго выхода через элемент ИЛИ 47 на выходе 27 и через элемент 41 ЗАПРЕТ и элемент НЕ 43 на
5 выходе 26 формируются соответственно логические сигналы 1
С третьего выхода распределителя 37 единичный сигнал через элемент ИЛИ 46 выдается на выходе 30 блока 4 управления,
0 на выходе 22 которого (четвертый выход распределителя импульсов 37) появляется через временную задержку, формируемую элементом 49 задержки Сигнал с этого же выхода распределителя 37 импульсов через
5 элемент ИЛИ 45 поступает на счетный вход счетчика 39, изменяя его содержимое на 1 и определяя тем самым следующий, второй адрес на выходе 21 блока 4 управления. Затем цикл операций повторяется и после
0 отработки последнего адреса датчиков с выхода старшего разряда счетчика 39 логическая 1 устанавливает триггер 32 в единичное состояние, тем самым закрывая элемент И 34 и отменяя режим калибровки
5 датчиков.
Этот же сигнал подготавливает элемент И 33, разрешая прохождение импульсов на счетный вход счетчика 38 Счетчик 39 находится в исходном состоянии. Через элемент 40 ЗАПРЕТ (на запрограммированное счетчиком 38 число тактов повторной обработки информации) циклически запускается распределитель 36 импульсов, с первого выхода которого через элемент ИЛИ 44 единичный сигнал поступает на выход 24 блока 4 управления. Со второго выход а распределителя 36 такой же сигнал через элемент ИЛИ 48 появляется на выходе 23 блока 4 и через элемент ИЛИ 47 - на выходе 27. одновременно формируя элементом 41 ЗАПРЕТ и элементом НЕ 43 нулевой сигнал на выходе 26 блока 4. Третий выход распределителя 36 через элемент ИЛИ 46 формирует единичный сигнал на выходе 30 блока 4, четвертый выход распределителя 36 дублирует появление через элемент ИЛИ 48 сигнала на выходе 23 блока 4, на выходах 25 и 28 которого логические 1 появляются последовательно с пятого и шестого выходов распределителя 36 импульсов. Его шестой выход управляет формированием через элементы ИЛИ 47, ЗАПРЕТ 41 и НЕ 43 единичных сигналов на выходах 26 и 27 блока 4.
Ко времени начала очередного цикла через элемент ИЛИ-НЕ 42 в распределитель 36 по его динамическому входу записывается вновь логическая 1. После завершения пересчета импульсов по счетному входу счетчиком 38 с его шестого разряда поступает логическая 1, запрещающая через элемент 40 ЗАПРЕТ работу распределителя 36 импульсов. Запускается распределитель 35 импульсов, с первого выхода которого единичный сигнал выдается на выход 29 блока управления. Второй выход распределителя 35 через элемент ИЛИ 45 управляет изменением содержимого счетчика 39 и адреса на выходе 21 блока 4 и обнулением счетчика 38. После опроса всех датчиков 1 согласно описанному цикл операций повторяется вновь с первого адреса по исходному состоянию счетчика 39.
Формула изобретения 1. Устройство для контроля параметров, содержащее блок памяти уставок, блок управления, первый и второй регистры, первую схему сравнения и коммутатор, информационные входы которого являются информационными входами устройства, вход запуска устройства подключен к входу запуска блока управления, первый выход которого соединен с адресными входами коммутатора и блока памяти уставок, вход разрешения записи которого подключен к второму выходу блока управления, третий выход которого соединен с входом разрешения считывания блока памяти усгавок, установочный вход устройства подключен к входу данных первого регистра, выход которого соединен с первым входом первой схемы сравнения, отличающееся тем, что,с целью повышения достоверности контроля за счет усреднения измеряемых параметров, в него введены два магистральных передатчика, блок элементов ИЛИ, блок элементов ЗАПРЕТ, сумматор-вычитатель, регистр сдвига, два блока элементов И и вторая схема сравнения, первый вход которой подключен к выходу первого регистра,
0 третий выход блока управления соединен с первым входом первого блока элементов И, выход которого подключен к второму входу первой схемы сравнения, выход которой является выходом сигнализации о превыше5 нии единичного измерения параметра допустимого уровня устройства, а выход сигнализации о превышении усредненной оценки параметра допустимого уровня устройства подключен к выходу второй схемы
0 сравнения, второй вход которой соединен с выходом второго блока элементов И, первый вход которого подключен к выходу регистра сдвига и соединен с первым входом блока элементов ИЛИ, второй вход которого
5 подключен к выходу блока памяти уставок, а выход - к первому входу блока элементов ЗАПРЕТ, выход которого соединен с первым входом сумматора-вычитателя, а второй вход - с выходами первого и второго
0 магистральных передатчиков, входы управления которых подключены соответственно к четвертому и пятому выходам блока управления, шестой и седьмой выходы которого соединены соответственно с первым и вто5 рым управляющим входами сумматора-вычитателя, выход которого подключен к второму входу первого блока элементов И, информационным входам регистра сдвига и второго регистра блока памяти, восьмой вы0 ход блока управления подключен к входу записи регистра сдвига, сдвиговый вход которого соединен с вторыми входами блока элементов ЗАПРЕТ и второго блока элементов И и подключен к девятому выходу блока
5 управления, десятый выход которого соединен с синхровходом второго регистра, выход которого подключен к информационному входу второго магистрального передатчика, выход коммутатора соединен с
0 информационным входом первого магистрального передатчика.
2. Устройство поп.1,отличающее- с я тем, что блок управления содержит триггер, два элемента И, три распределителя
5 импульсов, два счегчика, два элемента ЗАПРЕТ, элемент ИЛИ-НЕ, элемент НЕ, пять элементов ИЛИ, элемент задержки и управляемый генератор импульсов, управляющий вход которого является входом запуска блока, а выход подключен к первым входам
первого и второго элементов И, вторые входы которых соединены соответственно с прямым и инверсным выходами триггера, выход первого элемента И подключен к первому входу первого элемента ЗАПРЕТ и счетному входу первого счетчика, вход сброса которого соединен с вторым выходом первого распределителя импульсов, информационный вход которого подключен к выходу переполнения первого счетчика и второму входу первого элемента ЗАПРЕТ, выход которого соединен с тактовым входом второго распределителя импульсов, первый выход которого подключен к первым входам элемента ИЛИ-НЕ и первого элемента ИЛИ, второй выход первого распределителя импульсов соединен с первым входом второго элемента ИЛИ, второй вход которого подключен к входу элемента задержки, синхровходу триггера и четвертому выходу третьего распределителя импульсов, тактовый вход которого соединен с выходом второго элемента И, третий выход которого подключен к первому входу третьего элемента ИЛИ, второй вход которого соединен с третьим выходом второго распределителя импульсов и третьим входом элемента ИЛИ-НЕ, выход которого подключен к информационному входу второго распределителя импульсов, второй выход которого соединен с вторым входом элемента ИЛИ-НЕ и первыми входами четвертого и пятого элементов ИЛИ, вторые входы которых подключены к третьему выходу третьего распределителя импульсов и соответственно к четвертому выходу второго распределителя импульсов, соединенного с четвертым входом элемента ИЛИ-НЕ, выход второго элемента ИЛИ подключен к счетному входу второго счетчика, выходы разрядов которого являются первым выходом блока, выход старшего разряда второго счетчика соединен с первым входом триггера, выход элемента задержки является вторым выходом блока, третий выход которого подключен к выходу пятого элемента ИЛИ, первый выход третьего распределителя импульсов соединен с вторым входом первого элемента ИЛИ, выход которого является четвертым выходом блока, пятый выход которого подключен к пятому входу элемента ИЛИ-НЕ, соединенному с пятым выходом второго распределителя импульсов, шестой выход которого соединен с шестым
входом элемента ИЛИ-НЕ и является шестым выходом блока, седьмой выход которого подключен к выходу элемента НЕ, вход которого соединен с выходом второго элемента ЗАПРЕТ, первый вход которого объединен с третьим входом четвертого элемента ИЛИ и седьмым входом элемента ИЛИ-НЕ и подключен к седьмому выходу второго распределителя импульсов, выход четвертого элемента ИЛИ соединен с вторым входом второго элемента ЗАПРЕТ и является восьмым выходом блока, девятый и десятый выходы которого подключены соответственно к первому выходу первого распределителя импульсов и выходу третьего
элемента ИЛИ.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля температуры | 1988 |
|
SU1515176A1 |
| Устройство для контроля датчиков | 1986 |
|
SU1386966A1 |
| Устройство для разделения направлений передачи и приема | 1989 |
|
SU1734220A1 |
| Устройство для сигнализации | 1987 |
|
SU1462384A1 |
| Устройство для статистического анализа циклических процессов | 1984 |
|
SU1233171A1 |
| Устройство для контроля электропотребления | 1988 |
|
SU1566371A1 |
| Устройство для сигнализации | 1987 |
|
SU1429147A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ | 1983 |
|
SU1840568A1 |
| Устройство для контроля параметров | 1985 |
|
SU1277138A1 |
| Устройство для разделения направлений передачи в дуплексных системах связи | 1986 |
|
SU1332542A2 |
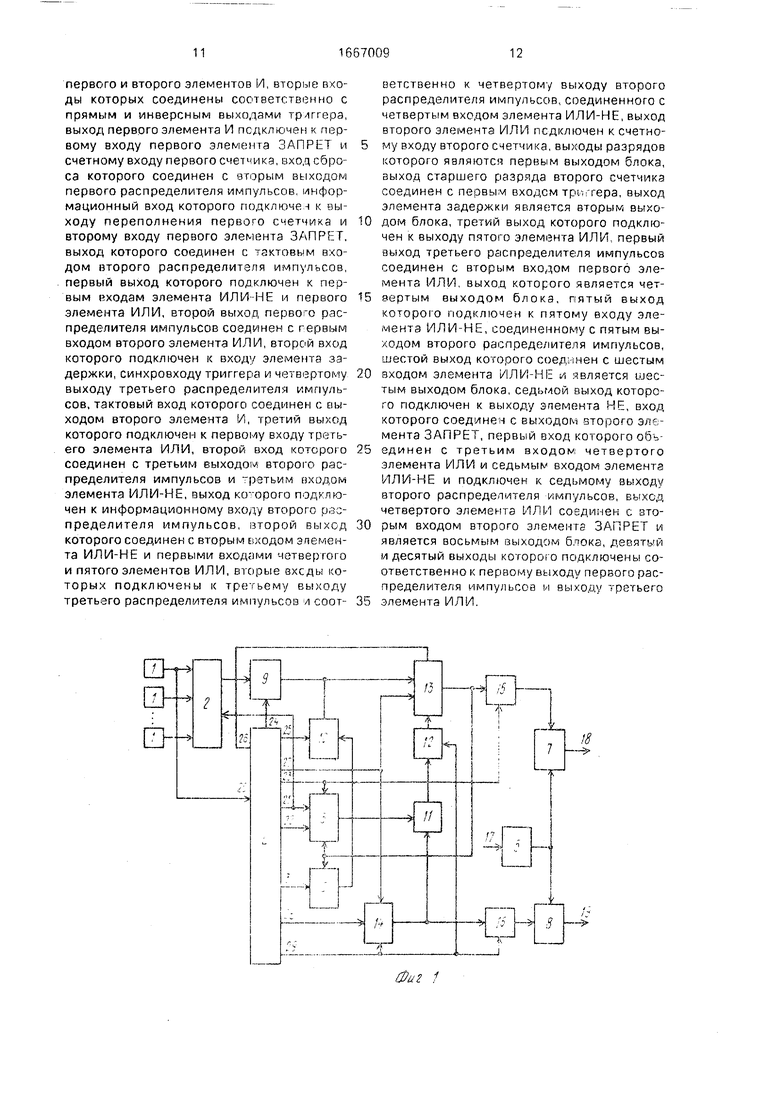
Изобретение относится к автоматике и предназначено для контроля датчиков состояния объектов в контрольно-диагностических информационных системах. Цель изобретения заключается в повышении достоверности контроля за счет усреднения измеряемых параметров. Цель достигается работой устройства в режимах калибровки датчиков и измерения. Устройство содержит датчики 1, коммутатор 2, блок 3 памяти, блок 4 управления, два регистра 5, 6, два блока сравнения 7, 8, два магистральных передатчика 9, 10, блок 11 элементов ИЛИ, блок 12 элементов ЗАПРЕТ, сумматор - вычитатель 13, регистр 14 сдвига. В указанных режимах измеренный сигнал проходит через коммутатор 2, магистральные передатчики 10 и 9, сумматор - вычитатель 13, проверяется в режимах блоками сравнения 7, 8 на соответствие допуску работоспособности, код граничного значения которого записан в регистре 5, с выдачей результатов сравнения на выходах 18, 19 устройства. В режиме измерения производится накопление сумматором - вычитателем 13 и регистром 14 измеренных значений рабочего параметра, индикация регистром 6 и после достижения заданной выборки приближение оценки измеряемой величины по адресу одного датчика 1 к ее действительной величине. Циклическая работа устройства осуществляется блоком 4 управления. 1 з.п. ф-лы, 2 ил.
Фиг 1
Фиг. 2
| Устройство для контроля состояния объектов | 1981 |
|
SU1015340A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
