Изобретение относится к вибрационной технике и может быть преимущественно использовано в качестве генератора плоских направленных механических колебаний в инерционно-импульсных движителях транспортных средств типа католет, в вибростолах, виброгрохотах, виброконвейерах и прочих виброустройствах, а также экспериментальных исследований свойств колебаний многомассовых систем со смещенными фазами колебаний масс,
Цель изобретения - расширение технологических возможностей вибровозбудителя за счет автоматического изменения фазы колебаний инерционных масс посредством реверса привода.
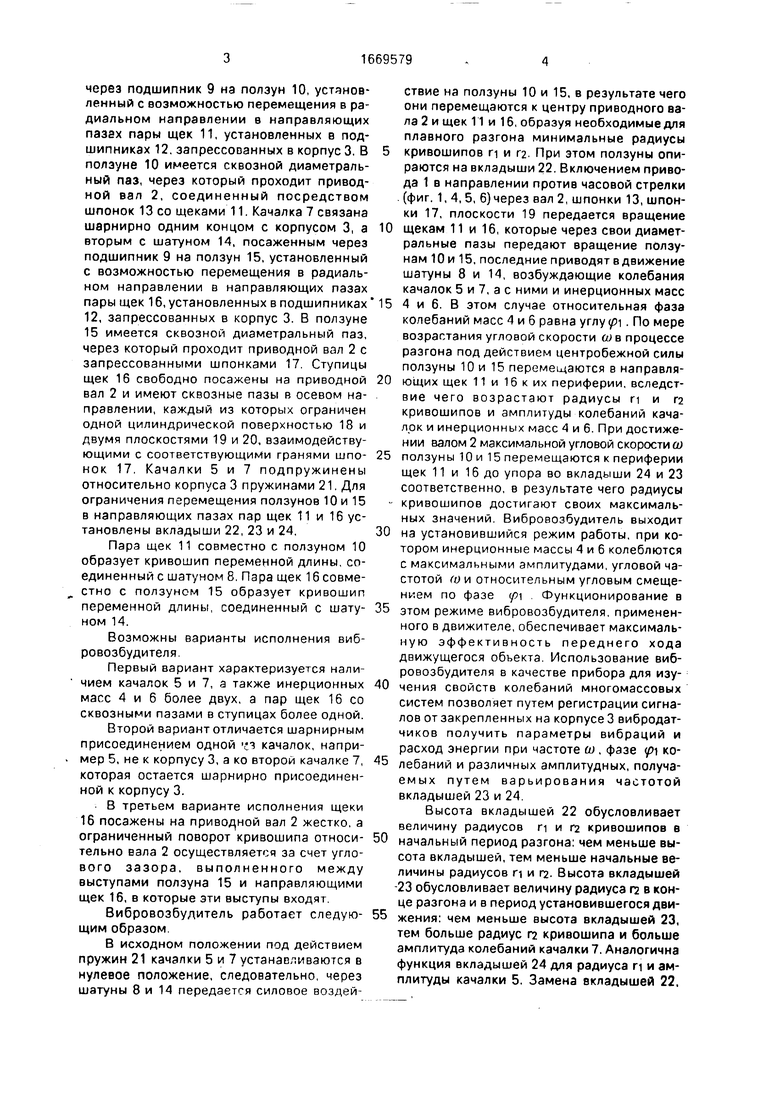
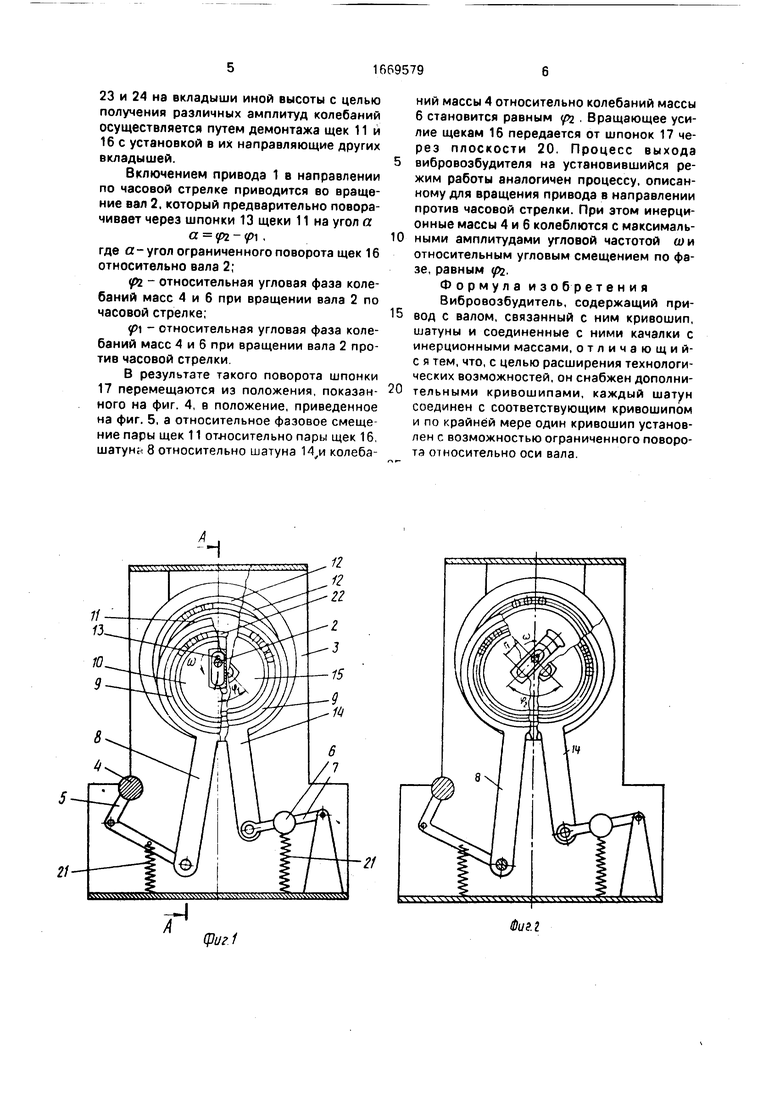
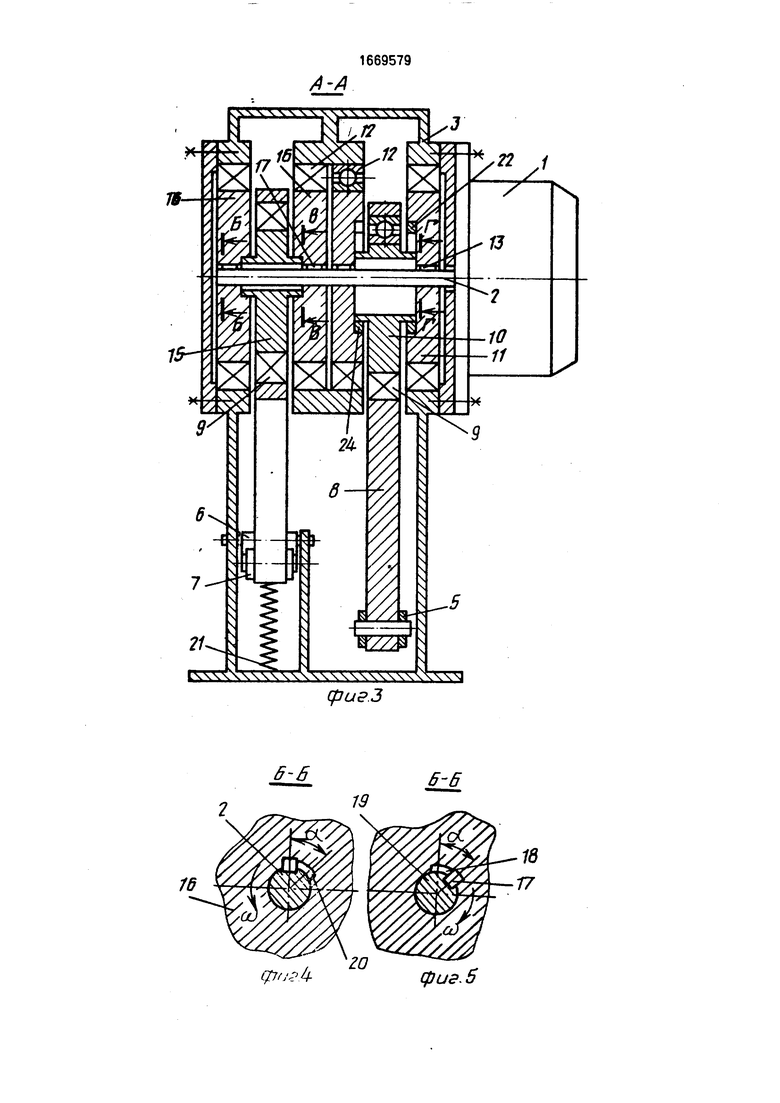
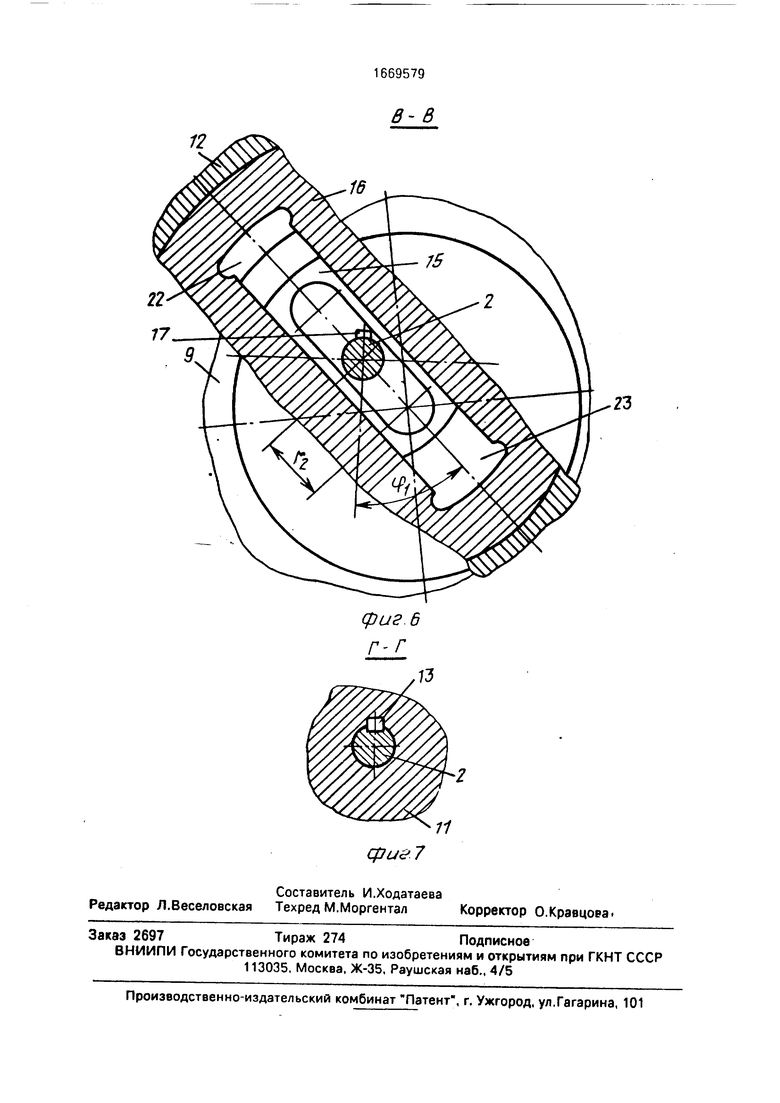
На фиг. 1 схематично изображен вибровозбудитель при вращении приводного вала протиз часовой стрелки, разрез; на фиг, 2 - то же, при вращении приводного вала по часовой стрелке; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3 при вращении приводного вала против часовой стрелки; на фиг. 5 - разрез Б-Б на фиг. 3 при вращении приводного вала по часовой стрелке; на фиг. 6 - разрез В-В на фиг. 3; на фиг. 7 - разрез Г-Г на фиг. 3.
Вибровозбудитель содержит привод 1 с валом 2, корпус 3, инерционную массу 4, закрепленную на качалке 5, и инерционную массу 6, закрепленную на качалке 7.Качалка 5 одним концом связана шарнирно с корпусом 3, а вторым с шатуном 8, посаженным
С
О
ю
СП
VI ю
через подшипник 9 на ползун 10, установленный с возможностью перемещения в радиальном направлении в направляющих пазах пары щек 11, установленных в подшипниках 12, запрессованных в корпус 3, В ползуне 10 имеется сквозной диаметральный паз, через который проходит приводной вал 2, соединенный посредством шпонок 13 со щеками 11. Качалка 7 связана шарнирно одним концом с корпусом 3, а вторым с шатуном 14, посаженным через подшипник 9 на ползун 15, установленный с возможностью перемещения в радиальном направлении в направляющих пазах пары щек 16, установленных в подшипниках 12, запрессованных в корпус 3. В ползуне
15имеется сквозной диаметральный паз, через который проходит приводной вал 2 с запрессованными шпонками 17. Ступицы щек 16 свободно посажены на приводной вал 2 и имеют сквозные пазы в осевом направлении, каждый из которых ограничен одной цилиндрической поверхностью 18 и двумя плоскостями 19 и 20, взаимодействующими с соответствующими гранями шпо- нок 17. Качалки 5 и 7 подпружинены относительно корпуса 3 пружинами 21, Для ограничения перемещения ползунов 10 и 15
в направляющих пазах пар щек 11 и 16 установлены вкладыши 22, 23 и 24,
Пара щек 11 совместно с ползуном 10 образует кривошип переменной длины, соединенный с шатуном 8. Пара щек 16 совместно с ползуном 15 образует кривошип переменной длины, соединенный с шату- ном 14.
Возможны варианты исполнения вибровозбудителя.
Первый вариант характеризуется наличием качалок 5 и 7, а также инерционных масс 4 и 6 более двух, а пар щек 16 со сквозными пазами в ступицах более одной.
Второй вариант отличается шарнирным присоединением одной гч качалок, например 5, не к корпусу 3, а ко второй качалке 7, которая остается шарнирно присоединенной к корпусу 3.
В третьем варианте исполнения щеки
16посажены на привозной вал 2 жестко, а ограниченный поворот кривошипа относи- тельно вала 2 осуществляется за счет углового зазора, выполненного между выступами ползуна 15 и направляющими щек 16, в которые эти выступы входят.
Вибровозбудитель работает следую- щим образом.
В исходном положении под действием пружин 21 качалки 5 и 7 устанавливаются в нулевое положение, следовательно, через шатуны 8 и 14 передается силовое воздействие на ползуны 10 и 15, в результате чего они перемещаются к центру приводного вала 2 и щек 11 и 16, образуя необходимые для плавного разгона минимальные радиусы кривошипов п и га. При этом ползуны опираются на вкладыши 22. Включением привода 1 в направлении против часовой стрелки (фиг. 1, 4,5, 6)через вал 2, шпонки 13, шпонки 17, плоскости 19 передается вращение щекам 11 и 16, которые через свои диаметральные пазы передают вращение ползунам 10 и 15, последние приводят в движение шатуны 8 и 14, возбуждающие колебания качалок 5 и 7, а с ними и инерционных масс 4 и 6. В этом случае относительная фаза колебаний масс 4 и 6 равна углу р-. По мере возрастания угловой скорости а) в процессе разгона под действием центробежной силы ползуны 10 и 15 перемещаются в направляющих щек 11 и 16 к их периферии, вследствие чего возрастают радиусы п и Г2 кривошипов и амплитуды колебаний качалок и инерционных масс 4 и 6. При достижении валом 2 максимальной угловой скорости ш ползуны 10 и 15 перемещаются к периферии щек 11 и 16 до упора во вкладыши 24 и 23 соответственно, в результате чего радиусы кривошипов достигают своих максимальных значений. Вибровозбудитель выходит на установившийся режим работы, при котором инерционные массы 4 и 6 колеблются с максимальными амплитудами, угловой частотой (о и относительным угловым смещением по фазе Функционирование в этом режиме вибровозбудителя, примененного в движителе, обеспечивает максимальную эффективность переднего хода движущегося объекта. Использование вибровозбудителя в качестве прибора для изучения свойств колебаний многомассовых систем позволяет путем регистрации сигналов от закрепленных на корпусе 3 вибродатчиков получить параметры вибраций и расход энергии при частоте ш , фазе колебаний и различных амплитудных, получаемых путем варьирования частотой вкладышей 23 и 24.
Высота вкладышей 22 обусловливает величину радиусов п и кривошипов в начальный период разгона: чем меньше высота вкладышей, тем меньше начальные величины радиусов п и гг. Высота вкладышей 23 обусловливает величину радиуса Г2 в конце разгона и в период установившегося движения: чем меньше высота вкладышей 23, тем больше радиус П2 кривошипа и больше амплитуда колебаний качалки 7. Аналогична функция вкладышей 24 для радиуса п и амплитуды качалки 5. Замена вкладышей 22.
23 и 24 на вкладыши иной высоты с целью получения различных амплитуд колебаний осуществляется путем демонтажа щек 11 и 16 с установкой в их направляющие других вкладышей.
Включением привода 1 в направлении по часовой стрелке приводится во вращение вал 2. который предварительно поворачивает через шпонки 13 щеки 11 на угол а
а рг - р,
где or- угол ограниченного поворота щек 16 относительно вала 2;
р2 - относительная угловая фаза колебаний масс 4 и 6 при вращении вала 2 по часовой стрелке;
р - относительная угловая фаза колебаний масс 4 и 6 при вращении вала 2 против часовой стрелки
В результате такого поворота шпонки 17 перемещаются из положения, показанного на фиг. 4, в положение, приведенное на фиг. 5, а относительное фазовое смещение пары щек 11 относительно пары щек 16, шатунг- 8 относительно шатуна 14,и колеба0
5
0
ний массы 4 относительно колебаний массы 6 становится равным де . Вращающее усилие щекам 16 передается от шпонок 17 через плоскости 20. Процесс выхода вибровозбудителя на установившийся режим работы аналогичен процессу, описанному для вращения привода в направлении против часовой стрелки. При этом инерционные массы 4 и 6 колеблются с максимальными амплитудами угловой частотой относительным угловым смещением по фазе, равным (pi.
Формула изобретения Вибровозбудитель, содержащий привод с валом, связанный с ним кривошип, шатуны и соединенные с ними качалки с инерционными массами, отличающий- с я тем, что, с целью расширения технологических возможностей, он снабжен дополнительными кривошипами, каждый шатун соединен с соответствующим кривошипом и по крайней мере один кривошип установлен с возможностью ограниченного поворота относительно оси вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибровозбудитель | 1988 |
|
SU1620158A1 |
| Вибровозбудитель | 1978 |
|
SU710660A1 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| СПОСОБ ДОБЫЧИ НЕФТИ С ИСПОЛЬЗОВАНИЕМ ШТАНГОВОГО ГЛУБИННОГО НАСОСА И СТАНОК-КАЧАЛКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2381383C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ С СИСТЕМОЙ КОМПЕНСАЦИИ ИНЕРЦИОННЫХ СИЛ (ВАРИАНТЫ) | 1998 |
|
RU2141043C1 |
| СТАНОК-КАЧАЛКА | 2004 |
|
RU2260713C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТАНОК-КАЧАЛКА | 2003 |
|
RU2265138C2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
| ПРИВОД СТАНКОВ-КАЧАЛОК | 2014 |
|
RU2557813C1 |
Изобретение относится к вибрационной технике. Цель изобретения - расширение технологических возможностей за счет автоматического изменения фазы колебаний инерционных масс. Вибровозбудитель содержит привод с приводным валом 2, корпус 3, инерционную массу 4, закрепленную на качалке 5, и инерционную массу 6, закрепленную на качалке 7. Качалки 5 и 7 соотвественно связаны с шатунами 8 и 14 и корпусом 3. Шатуны 8 и 14 через подшипники 9 посажены на ползуны 10 и 15 с возможностью перемещения в радиальном направлении в направляющих пазах пары щек. Ступицы одних щек свободно посажены на приводной вал 2 и имеют сквозные пазы в осевом направлении, каждый из которых ограничен одной цилиндрической поверхностью и двумя плоскостями, взаимодействующими с соответствующими гранями шпонок. Для ограничения перемещения ползунов 10 и 15 в направляющих пазах пар щек установлены вкладыши. Описанная конструкция позволяет моделировать два типа колебаний многомассовых систем, отличающихся фазой относительного смещения колебаний этих масс, и создает возможность ее эффективного применения в устройствах, основанных на колебаниях многомассовых систем. 7 ил.
фиг1
Фиг.г
О
r in
О) (О
to
Ч| ч
12
| Авторское свидетельство СССР № 928959, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
