се изготовления цилиндрического тела 1 из полимерных материалов.
Многоканальный регистратор 2 может быть выполнен, например, в виде электронно-вычислительной машины, имеющей возможность приема и обработки аналоговой информации, или по схеме, изображенной на фиг.2. Он содержит блоки 6-23 умножения, сумматоры 24 - 30, задатчик 31 координаты X, блок 32 вычисления косинуса, блок 33 индикации. Блоки 6-21 осуществляют умножение входной величины на постоянные коэффициенты, указанные в описании.
Если многоканальный регистратор 2 производит обработку информации в цифровой форме, то блоки 6, 7, 11 и 13 осуществляют также аналого-цифровое преобразование. Блоки 20 и 23 осуществляют перемножение поступающих на их входы величин. Сумматоры 24 - 30 производят суммирование поступающих на их входы величин . При помощи задатчика 31 производится задание координаты X точки, в которой необходимо определять деформации. Блок 32 производит вычисление косинуса от аргумента, который подается на его вход. Выходной величиной сумматора 30 является значение продольной деформации, а сумматора 29 - поперечной деформации
Задатчик 31 координаты X может быть выполнен, например, в виде входного блока клавиатуры или в виде потенциометра, выходной сигнал которого соответствует координате X с последующим аналого- цифровым преобразованием.
Блок 33 индикации может быть выполнен, например, в виде блока цифровой индикации или, если его входные сигналы представлены в аналоговой форме, в виде двухлучевого осциллографа.
Способ определения деформаций цилиндрических тел осуществляется следующим образом.
При деформировании тела 1 сигнал с каждого тенэометрического датчика представляет собой интегральную сумму локальных деформаций по всей длине тензометрического датчика, или ik
Uk /ЈkdSk,(1)
о
где Uk - сигнал, снимаемый с к-го тензометрического датчика;
Sk - криволинейная координата, совпадающая с продольной осевой линией к-го тензометрического датчика;
Ik - длина к-го тензометрического датчика;
Ek - локальные деформации вдоль координаты Sk.
Учитывая, что при осесимметричном на- гружении распределение деформаций не зависит от угла поворота вокруг продольной оси цилиндрического тела 1, а деформации сдвига равны нулю, принимая во внимание, что
dx
dSk
COS Ok
где х - координата, совпадающая с продольной осью цилиндрического тела 1;
Ok - угол наклона тензометрического датчика к образующей цилиндрической поверхности, параллельной оси X,
и выражая локальную деформацию е« через продольную и поперечную деформации в данной точке с учетом ориентации тензометрического датчика, из (1) находим:
I2
(Јxcos«k+f,-)dx,(2)
где I -длина цилиндрического тела 1:
Јх - продольная деформация; (-& поперечная деформация.
Для тенэометрического датчика 3 , поэтому
Uoi /Јx dx,
(3)
где Uoi - сигнал, снимаемый с тензометрического датчика 3, а для датчика 4«i const 0.откуда
Uo2-/(cosao2 + ) dx
COS «02
или
/ ц dx и 02
COS «02
- I
sin ao2
5
0
0
+ Uoi
cos 0:02
И)
Sin «02
где Uo2 - сигнал, снимаемый с тензометрического датчика 4;
о02 угол наклона тензометрического датчика 4 к образующей цилиндрической поверхности.
Представим продольную и поперечную деформации в виде разложения в функциональные ряды, например, в виде неполного разложения Фурье
Эо , V
е -ту- + 2 ат cos 2
т ях 1
(5)
.к
Ев -Ј + Ј bm cos
т ях
О Ј-1
т 1
(6)
где а0. bo, am, bm коэффициенты разложения
Исходя из выражения (3) и (4), находим.
, 2Uoi .
do ,
2 U 02 cos «02 , 2 U 01 cos2«o2
I
+
I
Sin GQ2 Sin «02
Остальные коэффициенты am. bm находим, задавая функциональные зависимости изменения угла наклона тензометрических датчиков к образующей цилиндрической поверхности для каждого тензометрического датчика. Например, задавая углы зависимостями
«k arccos е х
(выбраны исходя из возможностей минимизации объема вычислений), где (: - основание натурального логарифма;
ft- произвольная постоянная. и подставляя их совместно с выражениями (5) и (6) в выражение (2), приходим к системе п линейных уравнений с п неизвестными
a™ bm(m 1 2,. .. Р: Р -I ).
а° 2k/T
(е
- k р, л л , Ьо
- еЪ
П+2Т7(е
-k#
P/ X-Oni+J e.+1 f
E , P
(k/)2 ч-тгл
блока 7 К - т, для блока 8 Ке
для блока 9 Kg
/ , -,гп , f,W I - й Е ч -2
+ 2 bm .( (7)
(k/n:4(mff
где k принимает значения натурального ряда от Л до п.
Регистрируя непрерывно величину сигнала Uk с каждого тензометрического датчика при помощи многоканального регистратора 2. можно найти из системы уравнений (7) значения коэффициентов разложения ат, Ьт и по выражениям (5) и (6) определить продольные и поперечные деформации для заданной точки тела 1 в данный момент времени.
Блок-схема многоканального регистратора 2 представлена для случая, когда п 2.
Для блока 6 коэффициент Ке - 1 для
1,- „ ., е ft - 1
-- --р .
( (2/ У-Гф2
для блока 10 и блока 22 Кю «22
(тПЫМ; 1
/ц%,,,- « ,..« м-1) р, (,,., .2)
с....COS «02г- ,п
для блока 11 Кп j- - , для блока 12
I sin «02
КГ2
блока
К15-
- Р
14 Км
для блока 13 Ki3 cos ao2
1, для , для блока 15
-2f
- 1
2/Г
Tfr+e +2
0
-f()2
для
- & 1 +е Т
I Sin (702
, для блока 16 Kie , для блока 17 KI блока 18 KIB-
7Гч2
((т
, для блока 19 Kig
п Т
для
блока 21 «21 -ft
,+ 1
0
5
0
5
5
Многоканальный регистратор 2 работает следующим образом
С третьего входа многоканального регистратора 2 сигнал через блок б поступает на первый вход сумматора 24. Сигнал Uoi с первого входа многоканального регистратора 2 после прохождения через блоки 7 и 8 приобретает значение KyKsUoi на втром входе сумматора 24. На третий вход сумматора 24 поступает умноженная на коэффициент блока 12 сумма сигналов KnUoi с выхода блока 11 и Ki4Uo2 с выхода блока 14, входы которых соединены соответственно с первым и вторым входами многоканального регистратора 2. Таким образом, сигнал на выходе сумматора 24 составляет Ui + KyKsUoi+KiaCKnUoi KnUo2). а после прохождения через блок 9 он равен K9 Uit-K7K8Uoii-Ki2(KnUoi -KiiUo2), а на выходе блока 18 сигнал равен
0 + K7K8UoibKi2(KiiUoHKi4llo2).
На первый вход сумматора 27 подается
сигнал U2 с четвертого входа многоканального регистратора 2 через блок 13 аналого-цифрового преобразования. Сиг5 нал на выходе блока 7 составляет KyUoi, а на выходе блока 15 KyKisUoi. Сигнал на выходе блока 17составляет
Ki7(Ki4Uo2+KnUoi). Таким образом, выходной сигнал сумматора 27 равен
0 U2+Ki7Ki5Uoi+Ki7(Ki4Uo2-KnUoi). а после прохождения через блоки 16 и 21 становитсяравным соответственно
K16 U2+K7K15U01 + K17(KHUOZ+ Kl lUoi)И
K2l U2+K Kl5Uoi + Kl7(Kl4Uo24KnUoi).
После суммирования в сумматоре 25 и умножения в блоке 10 сигнал на первом входе блока 23 составляет
Kio{K9 Ui+ K7K8Uoi - Ki2(KnUoi +
+ K14U02)+ + K Kl5Uni + Ki7(Ki4Uo2 +
+KnUoi), а после прохождения сумматора 28 и блока 22 сигнал на втором входеблока20равен
K22{Kie Ui+K7KeUoi+Ki2(KiiUoi + Ki4Uo2) +
+K21 U2+K7K15U01+K17(K14U02+K11U01)}.
Координата X задается оператором при помощи задатчика 31 координаты X. На выходе блока 19 сигнал равен Kigx, блок 32 производит вычисление косинуса той величины и на первом входе блока 20 и втором входе блока 23 сигнал равен cos Kigx, а на выходах блоков 20 и 23 сигналы составляют соответственно
K22{K18 U1 + K7K8U01 + K12(K11U01 + + Kl4Uo2)+K2l U2-t-K7Kl5Uoi + Kl7(Kl4Uo2 + + K11U01)}COSK19X
и
Kio{K9 Ui + K7KeUoi + Ki2(KnUoi +
+ K14U02)+K16 U2+K7K15U01 + K17(K14U02 +
+KiiUoi)}cosKigx.
Окончательно после суммирования входных величин сумматором 30 его выходная величина, соответствующая продольной деформации и подаваемая на первый вход блока 33 индикации, равна
ex K7Uoi + Kio{Kg Ui + K7K8Uoi + +K12(K11U01 + K14U02) + K7K15U01 + +K17(K14U02+K11U01 }COSK19X,
или с учетом указанных значений коэффициентов
, «. И1ПН Н1Г
t ip(i.e «Cl)(( 1 .f- «.H 7(J(f f,. (n)
,f i Гц. . . P(«p).(ffr I U I l.U
с.««я „ П ,, e-W-,
. ( IT-
(й -|- 1 4-т
Выходная величина сумматора 29, соответствующая поперечной деформации и подаваемая на второй вход блока 33 индикации, равна
Efl KnUoi+Ki4Uo2+K22{Ki8 Ui+K7KaUoi+ -t-Ki2(KiiUoi + Ki4Uo2)+K2i{U2+K7Ki5Uoi
+ К 17(K14U02+K11U01)}COSK19X
или, подставляя значения коэффициентов,
U co.Ve,
е .-
fce f 5,.
PMD MI J
4|M(.« )(tl.s .«H/lfe .ille l. 7|.z)
I .
(iffe Г е (-i Г ТГ
u
Использование предлагаемого способа определения деформаций цилиндрических тел и устройства для его осуществления повышает информативность за счет возможности определения продольных и поперечных деформаций в любой заданной точке поверхности.
Формула изобретения Способ определения деформаций конструкций, заключающийся в том, что на конструкции размещают набор тензометри- ческих датчиков, длина которых соответствует длине исследуемой поверхности конструкции, и по их показаниям определяют деформацию конструкции, отличающийся тем, что, с целью повышения информативности при измерении деформации цилиндрических тел, тензометрические датчики размещают под углом к образующей цилиндрической поверхности так, что для двух датчиков эти углы постоянны по длине и различны между собой, а углы наклона остальных датчиков монотонно изме- няются в одну сторону и в любом поперечном сечении тела различны между собой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрическое устройство | 1990 |
|
SU1758414A1 |
| Тензометрическое устройство | 1991 |
|
SU1796890A1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ФОРМЫ ИМПУЛЬСОВ СВЕРХБОЛЬШИХ ТОКОВ | 1998 |
|
RU2158428C2 |
| Устройство координатного позиционирования | 1989 |
|
SU1695264A1 |
| Дробно-рациональный преобразователь код-фаза | 1989 |
|
SU1683043A1 |
| Устройство для контроля объемной плотности диэлектрических материалов | 1990 |
|
SU1784904A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ РАБОТЫ МАШИННО-ТРАКТОРНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2603815C1 |
| ОПОРНАЯ СИСТЕМА ТРУБОПРОВОДА | 2004 |
|
RU2249747C1 |
| Устройство для графической регистрации характеристик объекта при вибрационных испытаниях | 1972 |
|
SU478199A1 |
| Система управления | 1991 |
|
SU1792539A3 |
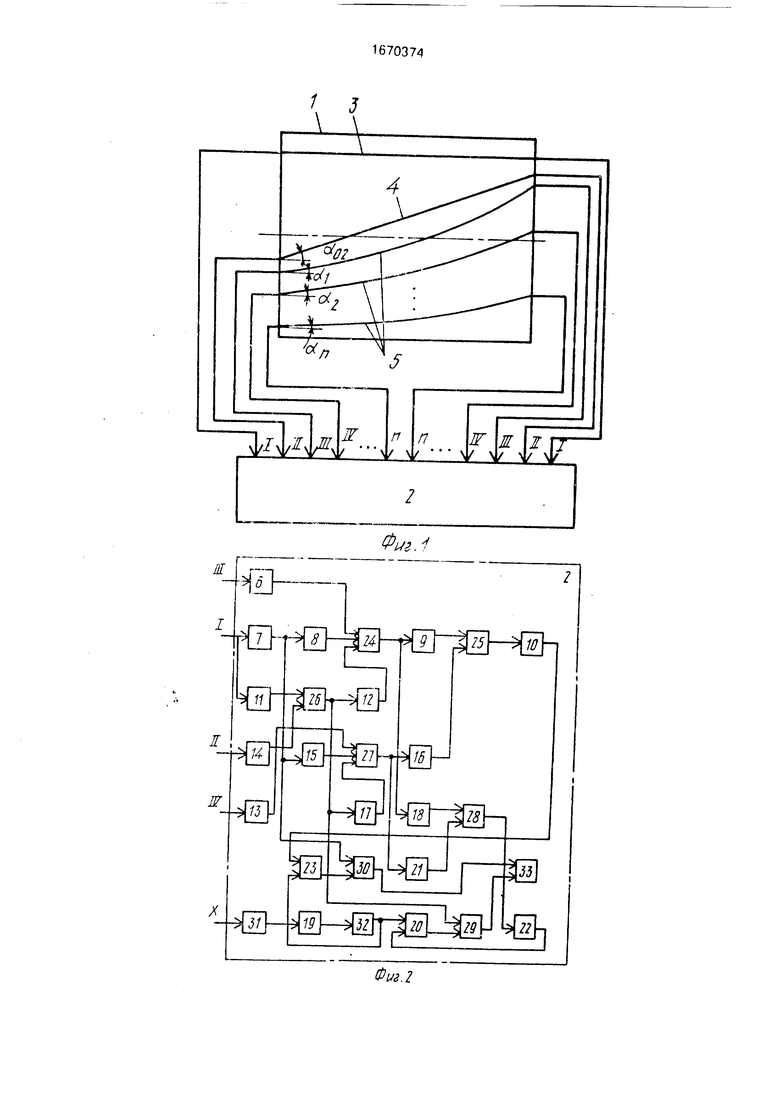
Изобретение относится к измерительной технике а именно к средствам определения деформаций конструкций. На цилиндрической поверхности конструкции размещают набор тензометрических датчиков с определенной ориентацией относительно образующей конструкции. Углы наклона двух датчиков к образующей цилиндрической поверхности постоянны по всей длине и различны между собой, а для группы остальных датчиков эти углы монотонно изменяются в одну сторону и в любом поперечном сечении конструкции различны между собой. Набор включает в себя один прямолинейный датчик, второй датчик имеет конфигурацию винтовой линии с постоянным шагом, остальные датчики имеют конфигурацию винтовых линий с переменным шагом. По их показаниям определяют в многоканальном регистраторе коэффициенты функциональных рядов, а деформации определяют как суммы функциональных рядов. 2 ил.
Ж
НИ-
Фм.1
| Устройство для измерения упругих деформаций конструкции | 1980 |
|
SU937998A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
