Изобретение относится к контрольно-измерительной технике и может использоваться в сельском хозяйстве для раздельного измерения времени работы, времени простоя или времени холостого хода машинно-тракторного агрегата (МТА), для измерения скорости движения и маршрута МТА.
Известно устройство для учета количества моточасов при работе машинно-тракторного агрегата. Данное устройство предназначено для учета времени работы двигателя внутреннего сгорания (ЛВС) или косвенного измерения времени работы машинно-тракторного агрегата в целом. Данное устройство является электромеханическим. Счетчик устройства запускается при подаче на него электрического сигнала (при включении зажигания), но в электрической цепи счетчика установлен контакт от датчика давления масла в двигателе. Такая комбинация позволяет точно учитывать время работы двигателя [1].
Недостатками данного устройства являются невозможность раздельного учета времени холостой работы ЛВС и под нагрузкой, в режиме холостого хода МТА или простоя, с работающим двигателем.
Известен способ определения наработки двигателя внутреннего сгорания транспортной машины и устройство для его осуществления [2]. Изобретение относится к машиностроению, а именно к измерительной технике, и может быть использовано для контроля и учета наработки (ЛВС) мобильной силовой установки и МТА в целом. Способ позволяет повысить достоверность измерения наработки и заключается в том, что замеряют время общей работы (наработки) ЛВС, дополнительно замеряют время работы и текущую степень загрузки двигателя. Устройство для определения наработки содержит датчик времени, датчик загрузки ЛВС по мощности, содержащий датчик частоты вращения и датчик крутящего момента ЛВС, включенные через последовательно соединенные блок умножения и нормирующее устройство на второй вход первого блока умножения. Выходы сумматора моточасов и сумматора полнозагрузочных моточасов соединены соответственно с входом индикатора [2].
Данный способ и устройство для его осуществления благодаря предложенной совокупности датчиков позволяют проводить раздельный учет наработки в режиме простоя МТА (холостой ход ДВС) и в режиме работы МТА (ЛВС под нагрузкой).
Недостатками данного способа и устройства для его осуществления является невозможность раздельного учета наработки в режиме холостого движения МТА (холостые маневры на поле, движение от места стоянки до поля и обратно в транспортном положении) и в режиме работы МТА под нагрузкой (при выполнении рабочих операций). Также недостатком данного устройства и способа является невозможность определения и регистрации координат МТА и маршрута его движения. Также известный способ и устройство позволяют достоверно определять наработку лишь ДВС, а наработку всего МТА определяют по косвенным показателям (загрузка двигателя). Результаты определения наработки МТА таким способом являются не совсем достоверными.
Также к недостаткам известного способа и устройства относится и то, что определяется только наработка, измеряемая в моточасах, но отсутствует возможность определения астрономического времени работы МТА в часах. Тогда как астрономическое время работы МТА необходимо для экономической оценки эффективности роботы.
Наиболее близким по сходным признакам к предлагаемому является известное устройство для контроля качества работы сельхозмашин и наработки их элементов [3]. Изобретение относится к области измерительной техники и может быть применено для контроля качества выполняемых работ, скорости и наработок сельскохозяйственных машин и агрегатов [3].
Данное устройство, содержащее датчик величины скорости, имеющий задатчик длины окружности колеса и соединенный выходом с измерителем скорости и входом блока умножения, включающим задатчик ширины захвата и подключенного своим выходом к информационному входу блока коммутации, у которого управляющие входы соединены с выходами системы датчиков включения рабочих органов, а первый и второй выходы подключены соответственно к входу блока контроля и к входу первого суммирующего счетчика, и второй суммирующий счетчик, он дополнительно снабжен задатчиком допустимого диапазона скоростей [3].
Данное устройство за счет представленной комбинации датчиков, счетчиков и блоков контроля позволяет осуществить способ раздельного определения наработки МТА и его элементов в различных режимах: холостого хода, простоя и работы под нагрузкой. Также предусмотрена возможность измерения скорости движения МТА и пройденного им пути.
Недостатком известного устройства является невозможность определения величины загрузки МТА (затрачиваемой мощности) или величины усилия, действующего со стороны агрегата, а фиксируется только положение рабочих органов (с помощью датчиков рабочих органов ДРО).
Также недостатком данного устройства, как и предыдущего (см. описание способа и устройства [2]), является то, что определяется только наработка в моточасах, но отсутствует возможность определения астрономического времени работы МТА в астрономических часах как в целом, так и в каждом режиме функционирования по отдельности. Также данное устройство не позволяет определить координаты МТА и составить его маршрут.
Недостатком является и то, что измерение пройденного пути и скорости движения с помощью измерительного колеса является не точным, так как сцепление поверхности колеса с почвой существенно зависит от типа и состояния почвы, выровненности поверхности почвы и ее механических свойств.
Цель изобретения: расширить функциональные возможности измерительной системы, т.е. обеспечить возможность точного раздельного измерения времени работы МТА, времени простоя, времени холостого хода, времени холостых маневров МТА на поле, а также обеспечить возможность определения мощности затрачиваемой МТА, его координат и маршрута движения.
Способ заключается в том, что производится одновременное измерение тягового усилия на сцепке машинно-тракторного агрегата (МТА), скорости движения и координат МТА, оборотов двигателя внутреннего сгорания (ДВС) с помощью соответствующих датчиков и устройств, в результате анализа, определяется режим работы МТА (холостой ход, рабочий ход, простой) (Табл. 1) и проводится раздельный учет общего времени работы МТА (в моточасах t и астрономических часах 7), в режиме рабочего хода (tp и Tp соответственно), холостого хода (tx и Тх соответственно) и простоя (tп и Tп соответственно).
Особенно важен показатель количества загруженных (рабочих) моточасов tp и времени рабочего хода МТА Tp.
Также по предлагаемому способу проводится расчет и учет мощности МТА в каждом режиме работы.
По предлагаемому способу, на основании полученных в измерениях данных, проводится расчет следующих показателей, характеризующих эффективность работы МТА: общего времени работы МТА (t и Т соответственно), коэффициента загруженности (работы) (kp и Kp соответственно), коэффициента холостых ходов (в том числе холостых маневров МТА на поле) (kx и Кх соответственно) и коэффициента простоя (kп и Kп соответственно).
Общее время работы МТА в мото- и астрономических часах соответственно:

Коэффициент загруженности по мото- и астрономическим часам соответственно:

Коэффициент холостых ходов по мото- и астрономическим часам соответственно:

Коэффициент простоев по мото- и астрономическим часам соответственно:

Представленные коэффициенты могут изменяться в пределах от 0 до 1. По их величинам возможно составить эксплуатационную и экономическую характеристику эффективности использования МТА.
Предлагаемый способ осуществляется за счет специального устройства.
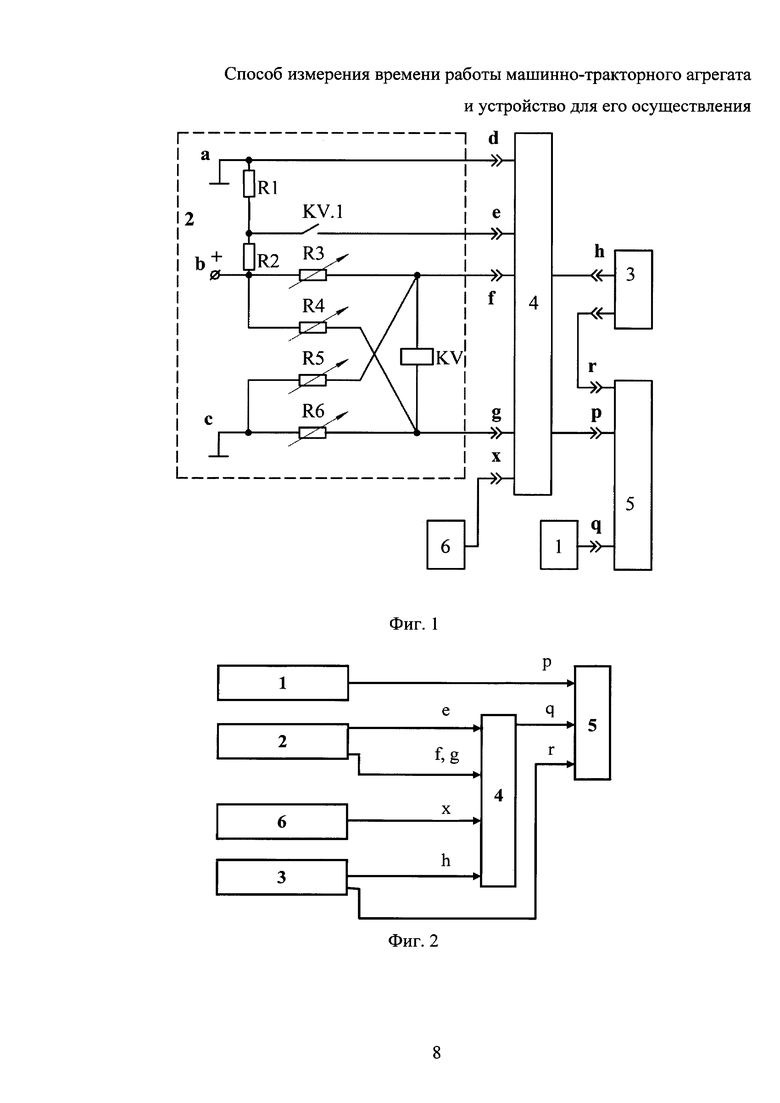
Устройство для осуществления предлагаемого способа содержит генератор элемента времени 1 (фиг. 1, 2), подключенный непосредственно к электронному регистратору сигналов 5, тензометрическое звено 2, со встроенным реле напряжения KV, подключенное к интегральному аналогово-цифровому преобразователю (АЦП) 4, бортовой модуль спутникового позиционирования 3 стандарта GPS или ГЛОНАСС, подключенный к интегральному АЦП 4 и электронному регистратору сигналов 5. Интегральный АЦП 4, в свою очередь, также подключен к электронному регистратору сигналов 5. Датчик оборотов двигателя 6 является аналоговым, поэтому он подключен только к интегральному АЦП 4.
Тензометрическое звено 2 содержит четыре тензометрических резистора (датчика) R3…R6, соединенных между собой по мостовой схеме (фиг. 1). Величины сопротивлений тензометрических резисторов изменяются в зависимости от их механической деформации. Нагрузкой моста в данном случае является катушка реле напряжения KV.
Электропитание в тензометрическое звено 2 подается от сети постоянного напряжения через стабилизатор на входы a, b и c.
В качестве электронного регистратора сигналов 5 используется бортовой или персональный компьютер, или запоминающий многоканальный осциллограф.
Устройство для осуществления предлагаемого способа работает следующим образом.
При возрастании нагрузки на сцепке МТА измерительный мост тензометрического звена 2 выходит из равновесного состояния и на катушке реле напряжения KV появляется разность потенциалов (напряжение). Величина напряжения на катушке прямо пропорциональна величине нагрузки на сцепке. При достижении определенной величины напряжения на катушке (в соответствие с настройкой) реле напряжения срабатывает и замыкающийся контакт KV.1 (фиг. 1) замыкается, обеспечивая подачу положительного потенциала на вход е блока АЦП 4. Вход d блока 4 необходим для подачи опорного потенциала.
Помимо дискретного сигнала, подаваемого на вход е, тензометрическое звено формирует и подает линейно изменяющийся аналоговый сигнал на входы f и g, блока 4. Данный сигнал характеризует величину усилия, действующего на сцепку МТА (фиг. 2).
Модуль спутникового позиционирования 3 также формирует два типа сигнала: аналоговый, подаваемый на вход h блока 4, имеющий в последнем два уровня лог. «0» и лог. «1», и характеризующий наличие или отсутствие движения МТА, а также цифровой сигнал, подаваемый непосредственно на вход r блока регистрации 5. Данный сигнал содержит информацию о маршруте движения МТА и его скорости движения.
Датчик оборотов ДВС 6 формирует и подает аналоговый сигнал на вход x блока АЦП 4.
Если нагрузка на сцепке отсутствует (режимы «Простой» или «Холостой ход»), то мост тензометрических резисторов находится в уравновешенном состоянии и напряжение на катушке реле напряжения KV отсутствует, при этом контакт реле KV.1 разомкнут и на вход е блока 4 потенциал не подается (генерируется сигнал лог. «0»). Если же на сцепку воздействует нагрузка определенного значения, то реле KV срабатывает, контакт KV.1 замыкается и на вход е блока 4 подается положительный потенциал (генерируется сигнал «1»).
Анализ состояния МТА и определение режима, в котором он функционирует, проводится, в основном, посредством сигналов с тензометрического звена 2 и устройства позиционирования 3.
Датчик оборотов ДВС 6 необходим для учета наработки, т.е. количества полнозагрузочных и холостых моточасов.
При наличии двух датчиков (тензометрическое звено 2 и устройство позиционирования 3) с двумя уровнями сигнала каждый, возможно четыре варианта сочетания факторов, соответствующих четырем режимам. Варианты режимов и их наименования поясняются таблицей 1.

Режим «Неисправность одного из датчиков» соответствует возможной ситуации, когда тензометрическое звено 2 сигнализирует о наличии рабочей нагрузки на сцепке МТА, а устройство позиционирования 3 генерирует сигнал об отсутствии движения МТА (лог. «0»). Такая комбинация факторов, в рабочем состоянии датчиков, не возможна и свидетельствует о неисправности какого-либо или обоих датчиков.
Источники информации
1. Патент на полезн. модель RU №43671, G07C 3/04. Счетчик моточасов. / М.Ш. Залятов, А.Х., Нурутдинов, Г.А. Бояров, опубл. 27.01.2005.
2. Авт. св. SU №1636707 G01M 15/00, G01L 3/24. Способ определения наработки двигателя внутреннего сгорания транспортной машины и устройство для его осуществления / С.А. Иофинов, Ю.П. Волошин, М.М. Арановский, В.П. Демидов, Г. А. Фокин, 23.03.1991.
3. Авт.св. SU №1791179, B60K 41/00, G01P 3/42, B60Q 5/00. Устройство для контроля качества работы сельхозмашин и наработки их элементов. / П.И. Гехт, И.П. Сычев, В.Ф. Довгаль, А.Е. Белявский, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2013 |
|
RU2560210C2 |
| Диагностический комплекс для удаленной оценки технического состояния дизельных двигателей внутреннего сгорания | 2024 |
|
RU2841344C1 |
| Способ определения наработки двигателя внутреннего сгорания и устройство для его осуществления | 2017 |
|
RU2665780C1 |
| Способ контроля параметров машино-тракторного агрегата | 2020 |
|
RU2748816C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2004 |
|
RU2272673C2 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| Система управления поворотом гусеничного трактора | 1990 |
|
SU1787859A1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| РЕГИСТРАТОР | 2014 |
|
RU2571775C2 |
| МАЛОГАБАРИТНАЯ СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2454713C1 |
Устройство содержит генератор элемента времени (1), подключенный непосредственно к электронному регистратору сигналов (5), тензометрическое звено (2), содержащее четыре тензометрических резистора (R3-R6), соединенных между собой по мостовой схеме, со встроенным реле напряжения (KV), подключенное к интегральному аналогово-цифровому преобразователю (АЦП) (4), бортовой модуль спутникового позиционирования (3), подключенный к электронному регистратору сигналов (5) и интегральному АЦП (4), который, в свою очередь, также подключен к электронному регистратору сигналов (5), а также датчик оборотов двигателя (6), подключенный только к интегральному АЦП (4). Тензометрическое звено (2) снабжено реле напряжения (KV), которое при срабатывании формирует аналоговый сигнал определенной величины, однозначно информирующий о наличии либо отсутствии нагрузки на сцепке МТА. Предложен также способ измерения времени работы машинно-тракторного агрегата. Достигается расширение функциональных возможностей измерительной системы. Также достигается обеспечение возможности точного раздельного измерения времени работы МТА, времени простоя, времени холостого хода, времени холостых маневров МТА на поле. Также достигается обеспечение возможности определения мощности, затрачиваемой МТА, его координат и маршрута движения. 2 н. и 1 з.п. ф-лы, 2 ил., 1 табл. 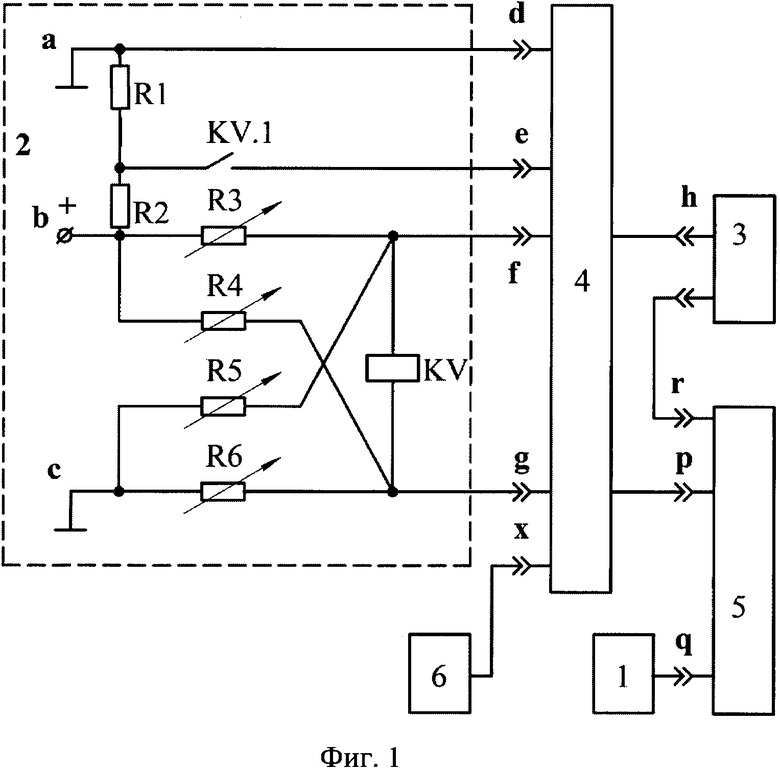
1. Способ измерения времени работы машинно-тракторного агрегата (МТА), заключающийся в определении наработки (моточасов) и времени работы МТА, отличающийся тем, что производится одновременное измерение тягового усилия на сцепке МТА, скорости его движения и координат, оборотов двигателя внутреннего сгорания (ДВС) с помощью соответствующих датчиков и устройств, в результате анализа определяется режим работы МТА, измеряется время работы и наработка в каждом режиме работы отдельно, а по отношению времени (или наработки) в соответствующих режимах к общему времени работы (общей наработки) определяются коэффициенты загруженности, холостого хода и простоя соответственно, по величине тягового усилия на сцепке МТА определяется мощность, затрачиваемая МТА в каждом режиме его работы, а время работы МТА в каждом режиме определяется как в моточасах (наработка), так и астрономических часах.
2. Устройство для осуществления предлагаемого способа, содержащее генератор элемента времени, подключенный непосредственно к электронному регистратору сигналов, тензометрическое звено, содержащее четыре тензометрических резистора, соединенных между собой по мостовой схеме, со встроенным реле напряжения, подключенное к интегральному аналогово-цифровому преобразователю (АЦП), бортовой модуль спутникового позиционирования, подключенный к электронному регистратору сигналов и интегральному АЦП, который, в свою очередь, также подключен к электронному регистратору сигналов, а также датчик оборотов двигателя, подключенный только к интегральному АЦП, при этом тензометрическое звено снабжено реле напряжения, которое при срабатывании формирует аналоговый сигнал определенной величины, однозначно информирующий о наличии либо отсутствии нагрузки на сцепке МТА.
3. Устройство по п. 2, отличающееся тем, что снабжено бортовым модулем спутникового позиционирования, стандарта GPS или ГЛОНАСС.
| Устройство для контроля качества работы сельхозмашин и наработки их элементов | 1989 |
|
SU1791179A1 |
| Устройство для автоматического направления движения тракторного поезда при испытаниях на треке | 1978 |
|
SU677700A1 |
| Способ активного гашения удара транспортного средства о препятствие | 2017 |
|
RU2674734C1 |

