та;ш пропорциональна времени. В качестве программного блока служит коммутатор, поочередно переключающий сигналы датчик на вход измерительного блока, выделяющего синфазную с возбуждением (в другом случае сдвинутую на 90° по фазе) компонту сигнала; Таким образом, поочередная коммутация сигналов датчиков в том же порядке, е каком они расположены, вдоль какой-либо линии объекта испытаний, позволяет получить на выходе измерительного блока в каждый последующий момент времени величины соответствующих синфазных компонент, которыеВ том же порядке ре- i гистрируются по вертикали на щлейфовом осциллографе. При наличии горизонтальной развертки эта последовательность вертикальных линий дает представление о форме колебаний объекта (вдоль заранее выбранной определенной линии), при условии, что последовательность коммутации датчиков соответствует порядку их расстановки вдол выбранной линии объекта.
Известные способы и устройства не позволяют производить регистрацию форм колебаний и частотных характеристик сложных конструкций на плоскости. Указанное выше устройство для построения форм вынужденных колебаний позволяет регистри- фовать лишь простБю, одномерные формы (например, отдельно форму упругой линии фюзеляжа по одному датчику сечения), зависящие от одной координаты. Эта координата воспроизводится как временная разверка (по горизонтали) , а отклонения, про- порциональные сигналам датчиков регистрируются перпендикулярно к ней по вертикали.
Предлагаемое устройство обеспечивает возможность регистрации форм и частотных характеристик сложных конструкций на плоскости, увеличивает скорость обработки информации, делает регистрацию более наглядной благодаря возможности изображе Ния и вертикальных, и горизонтальных, и с любым наклоном линий, основания которых совпадают с положением точек измерения на силуэте объекта испытаний, а длины пропорциональны R (вещественным)
1 (мнимым) составляющим или амплитудам колебаний соответствующих точек конструкции для фиксированного момента времени.
Это достигается с помощью введения блока ввода коэффищгентов и своеобразного соединения элементов измерительного, программного блоков и блока регистрации.
I При возбуждении колебаний объект от jL
функционального генератора и силовозбу;-
дителей сигналы датчиков коммутируются (в произвольной, но заранее определенной последовательности) и поочередно поступа|ют на вход измерительного устройства, в котором, с помощью опорных напряжений генератора, формируются , 1щ сйставляк)Щие или амплитуды колебаний соответствующего датчика. Синхронно с этой коммутацией в программном устройстве считываются с перфоленты координаты соответствующих датчиков на силуэте объекта испытаний, а также величина угла положительного направления сигнала формы (для каждой точки измерения). Эта информация через блоки памяти преобразуется в непрерывный вид и суммируется с выходными напряжениями измерительного блока. Полученные таким образом электрические напряжения поступают на входы X и У двукоординатного регистратора и регистрируются в виде линий формы, основания которых соответствуют расположению датчиков на силуэте объекта, протяженность соответствует значениям измеряемых величин (например, амплитудам колебаний), а направления - заданным положительным направлениям (например вдоль оси жестко- сти стреловидного крыла самолета). Для устранения перечеркивания или замазывани изображения, на-вход Z (управления подъ емом пера двухкоординатного регистратора . подаются синхронизированные сигналы, ко торые поднимают перо в нерабочее положение на те промежутки времени, пока происходит коммутация, устанавливаются напряжения координат и т. п.
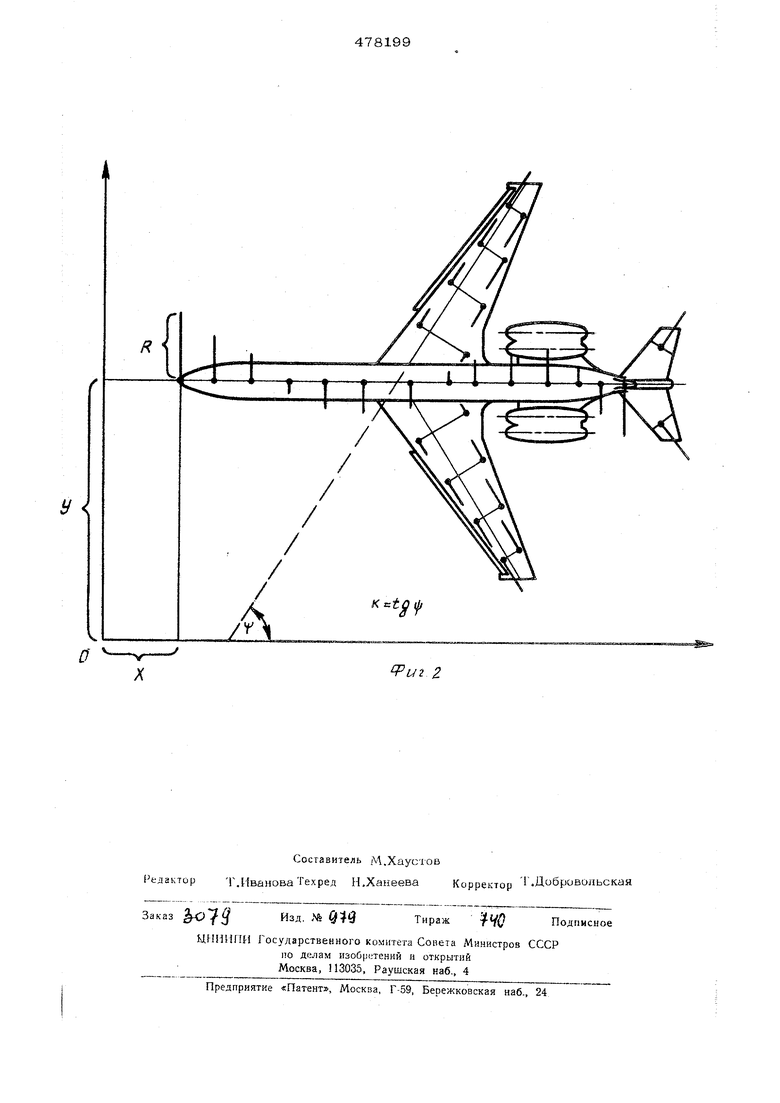
На фиг. 1 представлена блок-схема устройства nfisi графической регистрации характеристик объекта при вибрационных испытаниях:, на фиг. 2 - контур исследуемого объекта с нанесенными на нем линиями форм колебаний, представляющими вещественные составляющие векторов колебаний отдельных точек.
Устройство содержит исследуемый объект 1, датчики 2, программный блок 3 электродинамические силовозбудители 4, функциональный генератор 5, блок изме рения 6, блок регистрации 7, пульт уп равления 8.
Функциональный генератор 5 включает в себя кварцевый генератор 9, делитель частоты 10, формирователь 11 напряжений Sin cot и COS 001 частотные Ф9рмирователй 12, усилители 13.
Блок измерения 6 содержит аналогово|частотный преобразователь 14, двоичный умножитель 15, интегратор 16, полярный преобразователь 17.
Бпок регистрации 7 включает дискрет- j но-аналоговый преобразователь 18, сумматор 19, двухкоординатный самопишуишй регистратор 20.
Программный блок 3 содержит ленточный перфоратор 21, коммутатор 22, блоки памяти 23, блок ввода коэффициентов 24.
Устройство работает следующим образом. Синусоидальный сигнал с выхода функци нального генератора 5 поступает на элект динамические силовозбудители 4, которые возбуждают в исследуемом объекте 1 механические колебания. Сигналы с датчиков 2, установленных на объекте, коммутируются в программном блоке 3 и поочередно поступают на вход измерительного блока 6 т . е, на вход аналогово-частотного преоб разователя 14, где происходит преобразование аналогового сигнала датчика 2. На выходе преобразователя 14 появляется последовательность импульсов с частотой f модуляции, зависящей от мгновенного значения сигнала датчика. С выхода кварцевого генератора 9 и аналогово-частотного преобразователя 14 импульсные сигналы поступают на делители частоты 1О с изменяемым коэффициентом деления, который устанавливается с пульта управления 8. Сигнал кварцевого генератора 9 через делитель частоты 1О поступает в формирователь 11 Sin cot И COSOiit , в котором из последовательности импульсов формируются Sin CJOt и COS cot в параллельном коде и поступает на вход двоично го умножителя 15. Изменение кода осуществляется через равные интервалы, заданЕВые де;штелем частоты 10. На другой вход двоичного умножителя 15 поступает сигнал с аналогово-частотного преобразователя 14 через делитель частоты 10. В двоичном умножителе 15 происходит перемножение последовательности импульсов C5i.fl cot и COS oot « представленных в параллельном коде. На выходе умножителей 15 получается число им пульсов, пропорциональное произведениям МОЗ W W Эти произведения в интеграторах 16 нитег рируются, в результате чего получаются вещественная А и мнимая В составляющие входного сигнала с датчика 2. Для получения амплитуды напряжения R датчика 2 и фазы р дискретные сигналы А и В, представляющие сигнал датчика 2 в декартовой системе координат, поступаю на входы полярного преобразователя 17, По.пученные сигналы, пропорциональные вео
:личинам А, В, R и Ц) , выборочно гра- фически регистрируются предлагаемым устройством.
Для получения более наглядной картины 5 (см. фиг. 2) при графической регистрации форм колебаний или А, В Ч сигнала датчика 2 откладываются но нормали к выбранным линиям контура исследуемого объекта, который заранее вычерчивается и накладывается на двухкоордннатный самопишущий регистратор 20. Это достигается путем одновременной подачи на входу X и У регистратора 2О коммутируемых сигналов 5 и kR (или Аи kA, Ви kBa т. д., где k определяет to угла накло-на вектора формы колебаний в данной точке. Одновременно на входы регистратора 20 через сумматор 19 подается напряжепия У и у , пропорциональные координа- там датчика 2, на плоскости контура исследуемого объекта 1. В блоке считывания с перфоленты записана информация о номере датчика 2, его координатах X, У и коэф4)ициент k , который определяет наклон вектора 1 по нормали к выбран1Пэ1М /шниям контура исследуемого объекта 1. Регистрация форм колебаний начинается с переноса информации из ,пер({юратора 21 в блоки памяти 23 и через дискретно-аналогрвые преобразователи 18 поступает на i вход сумматора 19. На другой вход сумматера 19 подается значение сигнала R ( kA, kB, Ц У) с выхода блока 24 ввода коэффициентов, в котором осуществляет- ся перемножение двух сигналов К . оступающих с блока памяти 23 и сигнала Ц (А, В, Ц ), поступающего с дискретноаналог-ового преобразователя 18. С выхода сумматора 19 напряжение по- ступает на вход X и вход У двухкоординат- ного регистратора 2О. Опускание пера регистратора 20 происходит с помощью управляющего сигнала Z поступающего с блока интеграторов 16, после окончания цикла измерения сигнала датчика в дискретном измерительном блоке 6. Длительность цикла измерения устанавливается с пульта управления 8 в зависимости от заданной точности измерений. Подъем пера осуществляется по команде со схемы отработки (на фиг. 1 не показана) установившегося положения двигателей регистратора 2О. Для снятия частотных характеристик R((A)), А(со), B{oJ), (( на пульте управле- ния 8 вручную устанавливается номер датчика 2 и частота Ш функционального генератора 5. На вход У двухкоординат ного самопишущего регистратора 2О подается один из сигналов, пропорциональных R или А, или В,или f , а на вход,с пульта управления 8 поступает напряжение, пропорци нйпьное частоте (jj . При построении годографа на вход У регистратора 20 подается сигнал В, а на вход X - сигнал А и на пульте управления 8 вручную изменяется частота функционального генератора 5. Предлагаемое устройство позволяет ускорит пр|эцесс исследования форм колебаний объек тор, получить наглядную графическую кар тиру форм колебаний и снять частотные характеристики интересующих точек объекта. Вь{бранные дискретные схемы измерительно гоблока позволяют получить высокую точность результатов исследования объекта. Предмет изобретения Устройство для графической регистрации характеристик объекта при выбрашюнных испытаниях, содержащее датчики, коммутатор, электродинамические силовозбудители, подключенные к функциональному генерато- ру соединенному с измерительным блоком который в свою очередь подключен к программному блоку и блоку регистрации, включающим блок считывания с перфоленты анйлого-частотный преобразователь, делитель частоты, формирователь COi и j COS U)t j блоки умножения и интегрировав кия, полйрный преобразователь, блоки памяти, дискретно-аналоговые преобразователи, сумматор, двухкоординатный самопишущий регистратор, пульт управления, о т- личающееся тем, что, с целью обеспечения возможности регистрации форм колебаний и частотных характеристик сложных конструкций на плоскости, для наглядности и увеличения скорости обработки информации, в программный блок введен блок ввода коэффициентов, первый вход которого подключен к блоку памяти, а второй вход - к выходу дискретно-аналогового преобразователя, вход которого соединен с полярным преобразователем или неспосред- ственно с блоком интегрирования, который через блок умножения подключен одним входом к блоку формирования tot и COS iot s а другим через делитель частоты к аналого-частотному преобразователю, а выход блока ввода коэффициентов подключен ко входу сумматора, другие входы которого соединены с дискретно-аналоговыми преобразователями программного блока, а выходы сумматора подключены к двухкоорди кат ному самопиигущему регистратору.
Vuz 2


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления параметров нелинейных колебательных систем | 1985 |
|
SU1302243A1 |
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
| Устройство измерения параметров дисбаланса | 1990 |
|
SU1795318A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ФОРМЫ ИМПУЛЬСОВ СВЕРХБОЛЬШИХ ТОКОВ | 1998 |
|
RU2158428C2 |
| Устройство для измерения амплитудно- фАзОВыХ чАСТОТНыХ ХАРАКТЕРиСТиК | 1979 |
|
SU849151A1 |
| Ультразвуковое устройство для измерения контактных давлений | 1990 |
|
SU1746297A1 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2008 |
|
RU2371085C1 |
| Программно-задающее устройство | 1982 |
|
SU1120285A1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |