Изобретение относится к машиностроению, в частности к средствам гидропневмоавтоматики, и может быть использовано в качестве управляющих и исполнительных приводов цифровых систем автоматического управления,
Цель изобретения - повышение точности позиционирования и уменьшение объемных потерь.
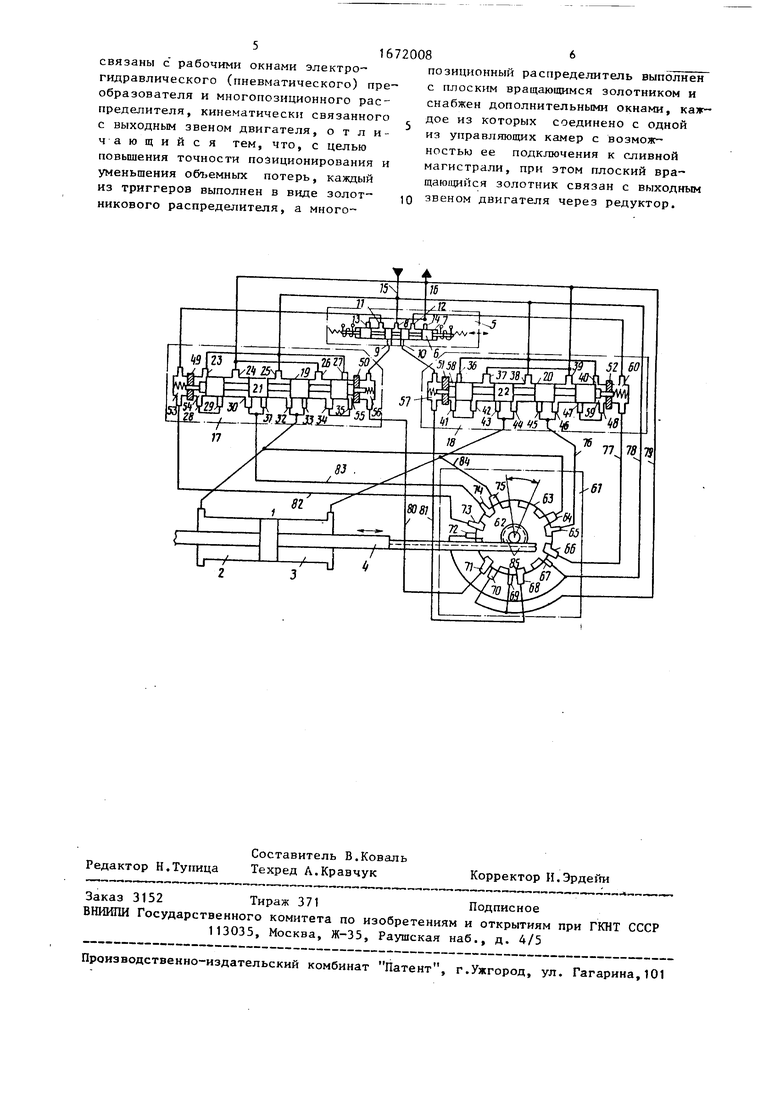
На чертеже представлена принципиальная гидравлическая (пневматическая) схема привода.
Шаговый гидравлический (пневматический) привод содержит исполнительный двигатель 1 с рабочими полостями 2 и 3, и выходным звеном 4 , электрогидравлический (пневматический) пре - образователь 5, выполненный в виде четырехпояскового золотника 6 и корпуса 7 с рабочими окнами 8 - 14. Рабочее окно 8 подключено к напорной магистрали 15, а окна 13 и 14 - к сливной магистрали 16 (атмосфере). Кроме того, привод включает два триггера 17 и 18, выполненные в виде золотниковых распределителей 19 и 20 с золотниками 21 и 22 и рабочими окнами 23 - 35 и 36 - 48 соответственно. Перегородки 49,50 и 51,52 распределителей 19 и 20 образуют управляющие камеры 53 - 56 и 57 - 60.
Многопозиционный распределитель 61 выполнен с плоским вращающимся золотником 62, установленным в корпусе 63 с рабочими окнами 64 - 75, подключенными каналами 76 - 84 к триг- , герам 17 и 18, напорной 15 и сливной 16 магистралям и рабочим полостям 2 и 3. Золотник 62 связан с выходным звеном 4 через зубчатореечный редуктор 85.
Привод работает следующим ебра- зом.
(Л
с
о
-vj
00
При отсутствии импульсов управления число-импульсного кода золотник преобразователя 5 находится в нейтральном положении, а золотники 21 и 22 занимают крайние положения: золотник 21 - правое, а золотник левое (по чертежу). При этом рабочие полости 2 и 3 двигателя 1 соединены с напорной магистралью 15 через окна 25,32 и 38,44 триггеров 17 и 18. В т же время каналы 76 и 84, связанные с полостями 2 и 3, соединены с рабочими окнами 64 и 75 распределителя 61, которые в свою очередь по канала 76 и 83 через рабочие окна 46 и 39 и 30 и 24 соединены со сливной магисралью 16. При отклонении выходного звена 4 под действием нагрузки, например, влево (по чертежу) одно- временно через реечно-зубчатый редуктор 85 поворачивается по часовой стрелке золотник 62 многопозиционного распределителя 61. При этом открывается окно 75 и рабочая полость 3 через каналы 84 и 83 и открытые окна 30 и 24 соединяется со сливом, вследствие чего давление в полости 3 уменьшается. Полость 2 двигателя 1 из-за закрывания окна 64 полностью отсекается от слива, оставляя подсоединенной к подаче рабочей среды через окна 32 и 25 триггера 17, и давление в ней растет. Таким образом, в рабочих полостях 2 и 3 возникает перпад давлений, который препятствует смещению выходного звена 4 под действием нагрузки.
Для совершения одного шага привода, например, вправо необходимо на вход преобразователя 5 подать один положительный импульс управления. При этом золотник 6 переместится впрво, открывая рабочие окна 10 и 14, через которые управляющая камера 54 соединяется с напорной магистралью 15, а управляющая камера 60 - со сливной магистралью 16. Под действием созданного перепада давлений золотник 22 перемещается вправо до перегородки 52 и фиксируется там прижимающим усилием, созданным перепдом давлений в управляющих камерах 58 и 59 за счет открытия окон 36 и 47. Причем величина этого прижимаю
щего усилия должна быть больше усилия сопротивления центрирующих пружин (не обозначены) золотника 22 триггера 1&.
0
Q 5 Q
5
5
После этого электрический сигнал, поданный на вход преобразователя 5, можно снимать, золотник 6 воэ-| вращается в нейтральное положение под действием центрирующих пружин и
.рабочие окна 10 и 14 перекрываются.
I В результате переключения триггера 18 в правое положение закрывает- ся его окна 44 и 46 и откры- ваются окна 43 и 45, полость
3через канал 84 и открытые окна 43 и 37 сообщается со сливной магистралью 16, а полость 2 через канал 75 и окна 64,65,45 и 38 дополнительно подключается к напорной магистрали 15. В результате выходное звено
4начинает перемещаться вправо,пово- рачивая против часовой стрелки через реечно-зубчатый редуктор 85 золотник 62. При повороте золотника 62 на угол, определенный геометрией распределителя 61, рабочее окно 67, связанное с напорной магистралью 15, соединяется через окно 66 с управляющей камерой 60 триггера 18, а окно 69, связанное со сливной магистралью 16, соединяется через окно 68 с управляющей камерой 57 триггера 18. В резуль - тате в управляющих камерах 57 и 60 создается перепад давлений, вызывающий обратное переключение золотника
22 в левое положение. При этом открываются окна 42,44,46 и 48 и закрываются окна 41,43,45 и 47, вследствие чего двигатель 1 останавливается, и привод переходит в режим удержания смещенного на шаг нового положения выходного звена 4, описанный ранее при отсутствии импульсов управления.
Для совершения шага в противоположном направлении работа происходит аналогично, только переключается триггер 17. происходит при подаче на преобразователь 5 отрицательного импульса управления о
Технико-экономическая эффективность от использования предлагаемого привода заключается в расширении области применения шаговых приводов.
Формула изобретения
Ызговый гидравлический (пневматический) привод, содержащий исполнительный двигатель, рабочие полости которого подключены к напорной и сливной магистралям через два триггера, И управляющие камеры каждого из которых
связаны с рабочими окнами электрогидравлического (пневматического) преобразователя и многопозиционного распределителя, кинематически связанного с выходным звеном двигателя, отличающийся тем, что, с целью повышения точности позиционирования и уменьшения объемных потерь, каждый из триггеров выполнен в виде золотникового распределителя, а много167
20086
позиционный распределитель выполнен с плоским вращающимся золотником и снабжен дополнительными окнами, каждое из которых соединено с одной ич управляющих камер с возможностью ее подключения к сливной магистрали, при этом плоский вращающийся золотник связан с выходным Ю звеном двигателя через редуктор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый гидравлический (пневматический) привод | 1991 |
|
SU1760186A2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| Система пневматического запуска двигателя внутреннего сгорания | 1980 |
|
SU937753A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Гидропривод | 1983 |
|
SU1132090A1 |
| Шаговый электрогидравлический привод | 1974 |
|
SU545777A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
Изобретение м.б. использовано в качестве управляющих и исполнительных приборов цифровых систем автоматического управления. Цель изобретения - повышение точности позициирования и уменьшение объемных потерь. Использование триггеров, выполненных в виде золотниковых распределителей, при соответствующем подключении их к рабочим полостям двигателя и к многопозиционному распределителю (МР), позволяет уменьшить объемные потери. Связь золотника с выходным звеном посредством редуктора позволяет получить малый шаг при больших геометрических размерах МР, что в целом повышает точность позиционирования. 1 ил.
| Шаговый электрогидравлический привод | 1974 |
|
SU545777A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
