Подвижное средство (ПС)
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ТРАНСПОРТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127905C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| Устройство для опознавания движущегосяОб'ЕКТА | 1979 |
|
SU836647A1 |
| СИСТЕМА СВЯЗИ С КОЛЛЕКТИВНЫМ ДОСТУПОМ И КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (СДМА), СИСТЕМА СВЯЗИ АБОНЕНТОВ С ПОМОЩЬЮ БАЗОВОЙ СТАНЦИИ С АБОНЕНТАМИ УДАЛЕННОЙ СИСТЕМЫ, СИСТЕМА МЕСТНОЙ СВЯЗИ И СПОСОБ СОЗДАНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ СДМА В СИСТЕМЕ СВЯЗИ | 1991 |
|
RU2111619C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2010 |
|
RU2452996C1 |

Изобретение может быть использовано для управления и контроля движением городского транспорта. Цель изобретения состоит в повышении быстродействия устройства за счет включения на контрольном пункте и подвижном средстве компараторов 5, 8 и блоков 2, 9 обработки информации. Выход приемника 6 сигнала запроса на подвижном средстве соединен с входом компаратора 8 подвижного средства, в котором обеспечивается селекция полезного сигнала по длительности. Блок 9 обработки информации дешифрует сигнал запроса и формирует ответное сообщение, которое с помощью передатчика 7 кодовой комбинации передается приемнику 5 кодовой комбинации контрольного пункта. Выбор высокой рабочей частоты приемно-передающих блоков (ъ800 МГц) и селекция принимаемых сигналов по длительности позволяют произвести обмен информацией между контрольным пунктом и подвижным средством уже за первый цикл связи. 7 ил.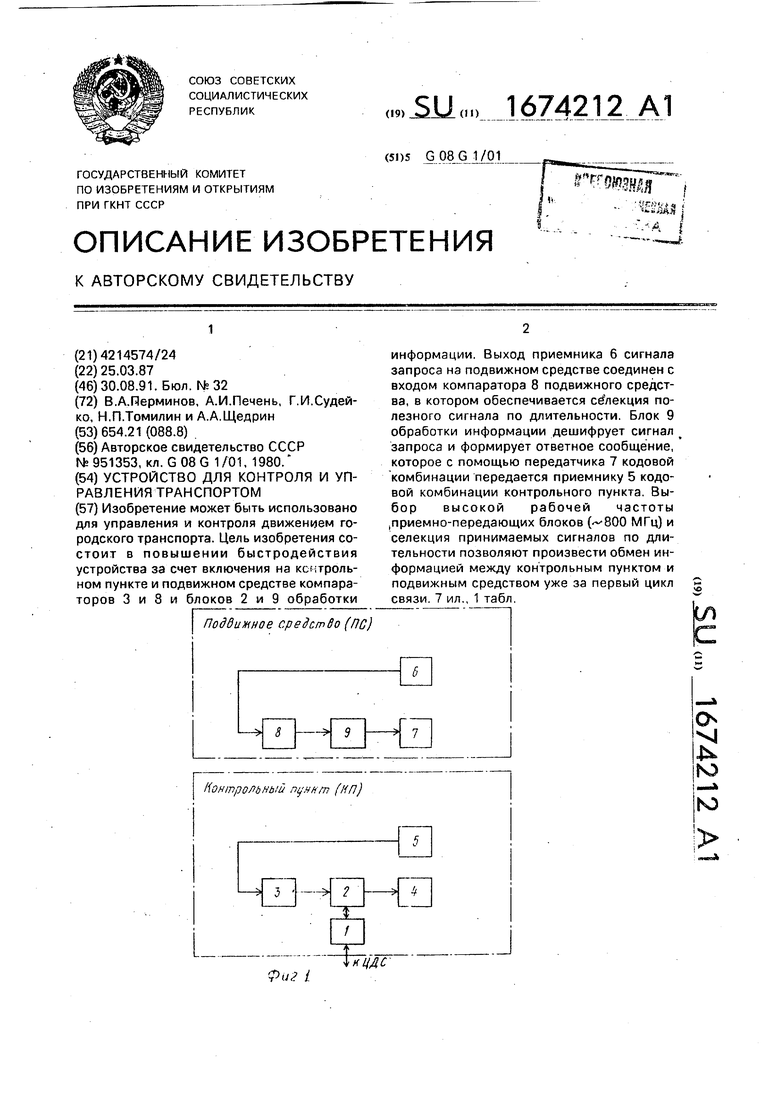
Г
j КдЫгроЛЬ ый (КП)
pus /
Г7
О vj
Ю
го
:
ЦДС
J
Изобретение относится к автоматизированным системам опознавания подвижных транспортных средств, контроля и управления их движением и может быть использовано, в частности, для управления и контроля движением городского транспорта.
Цель изобретения - повышение быстродействия работы устройства,
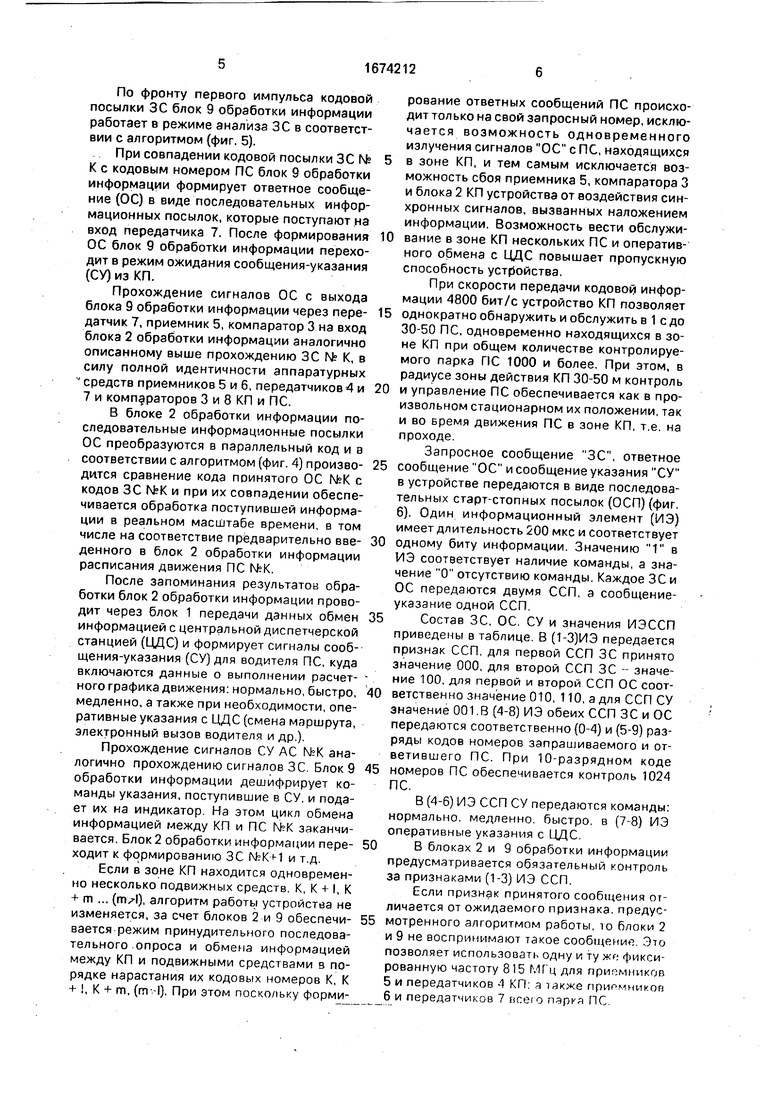
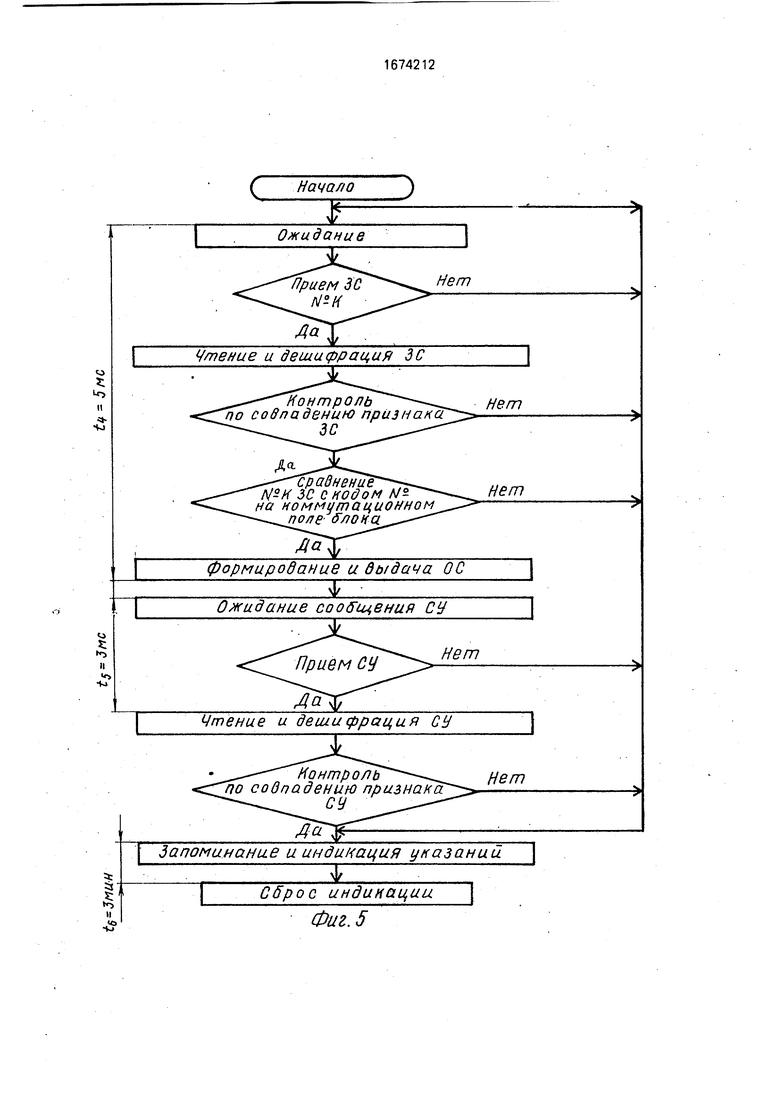
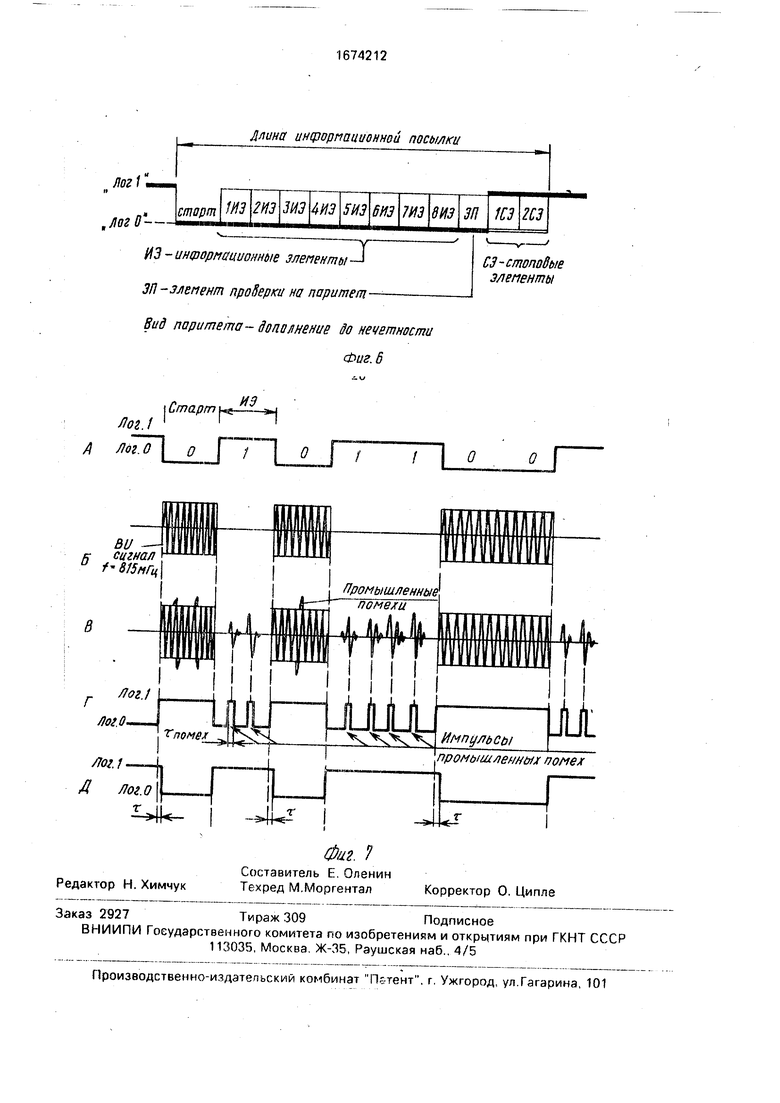
На фиг. 1 представлена функциональ- ная схема устройства для контроля и управления транспортом; на фиг. 2 - схема компаратора; на фиг. 3-5 - алгоритмы работы блоков 2 и 9 обработки информации; на фиг. 6 - формат информационных посылок, с помощью которых передается информация контрольным пунктом и подвижным средством, на фиг. 7 - временные диаграммы сигналов при передаче и приеме информации между контрольным пунктом и подвижным средством.
Устройство содержит на контрольном пункте (КП) блок 1 передачи данных, блок 2 обработки информации, компаратор 3, передатчик 4 сигнала запроса, приемник 5 ко- довой комбинации, на подвижном средстве (ПС) приемник 6 сигнала запроса, передатчик 7 кодовой комбинации, компаратор 8, блок 9 обработки информации.
Компаратор 3, расположенный на конт- рольном пункте и компаратор 8, расположенный на подвижном средстве, выполнены одинаково. Компаратор содержит элемент 10 задержки, одновибратор 11, элемент И 12.
Блоки 2 и 9 обработки информации выполнены на микроЭВМ типа Электроника 60М.
Устройство работает следующим образом.
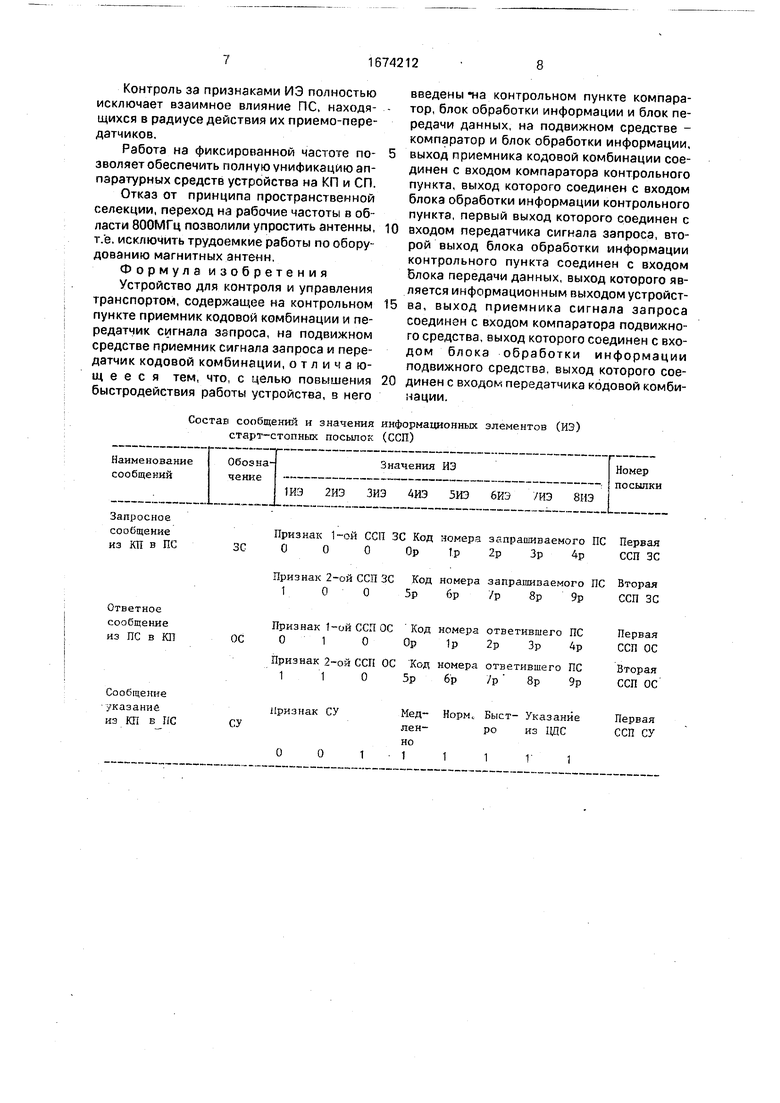
После включения устройства блок 2 обработки информации формирует первое запросное сообщение (ЗС) № 0. Выходной сигнал блока 2 обработки информации в виде последовательных информационных по- сылок (фиг. 7а) поступает на передатчик 4 сигнала запроса. С помощью модулятора и генератора высокой частоты передатчика 4 информационные посылки преобразуются в амплитудно-модулированный сигнал (фиг. 7) частотой 815 МГц, который излучается антенной передатчика 4.
После выдачи ЗС № 0 блок 2 обработки информации переходит в режим ожидания ответного сообщения (ОС) от ПС. Если в зоне КП ПС № 0 отсутствует, приема N° 0 не будет, и блок 2 обработки информации выдает следующее по циклу ЗС № 1 (фиг. 3). Если в зоне КП нет ни одного ПС, то происходит непрерывный последовательный
цикл формирования и излучения п запросных сообщений с последующим повторением этих циклов.
При появлении в зоне КП подвижного средства, допустим ПС № К его антенна воспринимает сигнал ЗС N К, который проходит через узкополосный (815+10 МГц) фильтр, усилитель высокой частоты, детектор, видеоусилитель, приемника 6 сигнала запроса и в виде кодовой комбинации импульсных сигналов стандартной амплитуды (фиг. 7г) поступает на входы элемента 10 задержки и одновибратора 11 компаратора 8. Одновременно с сигналом ЗС № К приемник 6 принимает сигналы промышленных помех. Спектральные составляющие помех, которые попадают в полосу пропускания фильтра, проходят через тракты приемника 6 и также поступают на вход компаратора 8.
Длительность Iя импульсных сигналов для частотных составляющих помех, выделяемых входным фильтром приемника 8 составляет ;{1-10) МКС.
Одновибратор 11 будет запускаться положительными перепадами напряжений как кодовых информационных посылок, так и импульсов помех, которые из-за нестационарности периода повторения могут оказаться на временных интервалах, соответствующих нулевому уровню кодовых посылок (фиг. 7 в, г)
После запуска одновибратор 11 вырабатывает на своем выходе импульсы отрицательной полярности длительностью г° 15 мкс, которая выбрана заведомо больше, чем максимально возможная длительность импульсов помех г/1 .
Импульсы ЗС и помех с глемента 10 задержки и импульсы с выходг. одновибратора 11 поступают соответственно на первый и второй входы элемента /112.
На выход этой схемы будут проходить только импульсы запросного сообщения (с укорочением по переднему фронту на величину -т° ), длительность которых значительно больше длительности rj Импульсы помех имеют длительность меньше длительности т и не могут пройти на выход элемента И 12, в результате устройство становится невосприимчивым к воздействию промышленных помех, достоверная информация полумается уже за первый цикл связи, повторного излучения ЗС не требуется и пропусная способность устройства за счет этого возрастает
Кодовые посылки ЗС Nfc К, не содержащие помехи (фиг. 7 д), поступают на вход блока 9 обработки информации.
По фронту первого импульса кодовой посылки ЗС блок 9 обработки информации работает в режиме анализа ЗС в соответствии с алгоритмом (фиг. 5).
При совпадении кодовой посылки ЗС № К с кодовым номером ПС блок 9 обработки информации формирует ответное сообщение (ОС) в виде последовательных информационных посылок, которые поступают на вход передатчика 7. После формирования ОС блок 9 обработки информации переходит в режим ожидания сообщения-указания (СУ) из КП.
Прохождение сигналов ОС с выхода блока 9 обработки информации через пере- датчик 7, приемник 5, компаратор 3 на вход блока 2 обработки информации аналогично описанному выше прохождению ЗС № К, в силу полной идентичности аппаратурных средств приемников 5 и 6, передатчиков 4 и 7 и компараторов 3 и 8 КП и ПС.
В блоке 2 обработки информации последовательные информационные посылки ОС преобразуются в параллельный код и о соответствии с алгоритмом (фиг. 4) произво- дится сравнение кода поинятого ОС с кодов ЗС и при их совпадении обеспечивается обработка поступившей информации в реальном масштабе времени, я том числе на соответствие предварительно вве- денного в блок 2 обработки информации расписания движения ПС .
После запоминания результатов обработки блок 2 обработки информации проводит через блок 1 передачи данных обмен информацией с центральной диспетчерской станцией (ЦДС) и формирует сигналы сообщения-указания (СУ) для водителя ПС, куда включаются данные о выполнении расчетного графика движения: нормально, быстро, медленно, а также при необходимости, оперативные указания с ЦДС (смена маршрута, электронный вызов водители и др ).
Прохождение сигналов СУ АС аналогично прохождению сигналов ЗС Блок 9 обработки информации дешифрирует команды указания, поступившие в СУ, и подает их на индикатор На этом цикл обмена информацией между КП и ПС №К заканчивается. Блок 2 обработки информации пере- ходит к формированию ЗС ГчККЧ и т.д.
Если в зоне КП находится одновременно несколько подвижных средств. К, К -( I, К + m ... (ггЫ), алгоритм работы устройства не изменяется, за счет блоков 2 и 9 обеспечи- вается режим принудительного последовательного опроса и обмена информацией между КП и подвижными средствами з порядке нарастания их кодовых номеров К. К , К - m. (m I). При этом поскольку формирование ответных сообщений ПС происходит только на свой запросный номер, исклю- чается возможность одновременного излучения сигналов ОС с ПС, находящихся в зоне КП, и тем самым исключается возможность сбоя приемника 5, компаратора 3 и блока 2 КП устройства от воздействия синхронных сигналов, вызванных наложением информации. Возможность вести обслуживание в зоне КП нескольких ПС и оперативного обмена с ЦДС повышает пропускную способность устройства.
При скорости передачи кодовой информации 4800 бит/с устройство КП позволяет однократно обнаружить и обслужить в 1 с до 30-50 ПС, одновременно находящихся в зоне КП при общем количестве контролируемого парка ПС 1000 и более. При этом, в радиусе зоны действия КП 30-50 м контроль и управление ПС обеспечивается как в произвольном стационарном их положении, так и во время движения ПС в зоне КП. т.е. на проходе
Запросное сообщение ЗС, ответное сообщение ОС и сообщение указания СУ в устройстве передаются в виде последовательных старт-стопных посылок (ОСП) (фиг. б). Один информационный элемент (ИЭ) имеет длительность 200 мкс и соответствует одному биту информации. Значению 1 в ИЭ соответствует наличие команды, а значение О отсутствию команды. Каждое ЗС и ОС передаются двумя ССП. а сообщение- указание одной ССП.
Состав ЗС. ОС, СУ и значения ИЭССП приведены в таблице. В (1-3)ИЭ передается признак ССП, для первой ССП ЗС принято значение 000. для второй ССП ЗС значение 100, для первой и второй ССП ОС соответственно значение 010, 110, а для ССП СУ значение 001.В (4-8) ИЭ обеих ССП ЗС и ОС передаются соответственно (0-4) и (5-9) разряды кодов номеров запрашиваемого и ответившего ПС. При 10-разрядном коде номеров ПС обеспечивается контроль 1024 ПС
В (4-6) ИЭ ССП СУ передаются команды: нормально медленно быстро, н (7-8) ИЭ оперативные указания с ЦДС
В блоках 2 и 9 обработки информации лредусма ривается обязательный контроль за признаками (1-3) ИЭ ССП.
Если признак принятого сообщения отличается от ожидаемого признака, предусмотренного алгоритмом работы, ю блоки 2 и 9 не воспринимают такое сообщение Это позволяет использоаап. одну и ту же фиксированную частоту 8 15 МГ ц для при .мникоп
5и передатчиков 4 КП ч ыкхе прис- -микоп
6и перелатай -JB 7 HCOI о п.чркл ТС
Контроль за признаками ИЭ полностью исключает взаимное влияние ПС, находя- щихся в радиусе действия их приемо-пере- датчиков.
Работа на фиксированной частоте по- зволяет обеспечить полную унификацию аппаратурных средств устройства на КП и СП.
Отказ от принципа пространственной селекции, переход на рабочие частоты в области 800МГц позволили упростить антенны, т.е. исключить трудоемкие работы по оборудованию магнитных антенн.
Формула изобретения
Устройство для контроля и управления транспортом, содержащее на контрольном пункте приемник кодовой комбинации и передатчик сигнала запроса, на подвижном средстве приемник сигнала запроса и передатчик кодовой комбинации, отличающееся тем, что, с целью повышения быстродействия работы устройства, в него
Состав сообщений и значения информационных элементов (ИЭ) старт-стопных посылок (ССП)
Признак 2-ой ССП ЗС Код номера запрашиваемого ПС Вторая 1 0 0 5р 6р /р 8р 9р ССП ЗС
Ответное сообщение из ПС в КП
ОС
Признак 1-ой ССП ОСКодномера ответившего ПС
01 0Ор1р 2р Зр Ар
Признак 2-ой ССП ОСКодномера ответившего ПС
11 05р6р /р 8р 9р
Признак СУ
СУ
введены на контрольном пункте компаратор, блок обработки информации и блок передачи данных, на подвижном средстве - компаратор и блок обработки информации, выход приемника кодовой комбинации соединен с входом компаратора контрольного пункта, выход которого соединен с входом блока обработки информации контрольного пункта, первый выход которого соединен с входом передатчика сигнала запроса, второй выход блока обработки информации контрольного пункта соединен с входом блока передачи данных, выход которого является информационным выходом устройства, выход приемника сигнала запроса соединен с входом компаратора подвижного средства, выход которого соединен с входом блока обработки информации подвижного средства, выход которого соединен с входом передатчика кодовой комбинации.
ответившего ПС
2р Зр Ар
ответившего ПС
/р 8р 9р
Быст- Указание ро из НДС 111
Первая ССП ОС
Вторая ССП ОС
Первая
ССП СУ
П
omS,8
(Начопо цикла опроса ПС)
(,--4,5+5,Омс
Ожидание ОС с №И
ti : г
I Ч
I
Вычисление отклонения от
графина
(норма, отставание, опережение)
Формирование ибо/дача СУ
Выдача ЗС с №н+1
Чтение и дешифрация ОС
контроле по совладей и нз признака ЈС
Да
Сравнение №К в ЭС с №вОС
Да
Ввод текущего времени
±
Сравнение с установленным графином движения
Nk.
Вычисление
данных для ЦДС
(npu5tjimue} ,
отклонение от
графина в мин)
А.
Фор мир ование и в oi дач а. ,е ния на цдс
ФигЛ
с
Начало
z
Ожидание
Чтение и дешифрация ЗС
Ионтроль
по совпадению признака ЗС
,
№
Трав не ни №к зс с ходом NZ на номмутационном поле &лока -
Л
формирование и вь/дача ОС
Ф
Ожидание соо&щения СУ
Прием СУ МоЧтение и дешифрация СУ
Ионтроль
7io совладению признан су Запоминание и индикация указаний
I
Сброс индикации
Фиг. 5
)
Нет
Нет
нет
нет
Hem
яогО - -
№-итрорпационные злепенты- ЗП-элепент npoSepxu на паритетВид паритета-дополнение до нечетности
Фиг. 6
Лог.
ИЗ | Старт
А ЛнТ о / | 0
ви
Q сигнал
В
Г
. Лог.1 I Лог.о1
СЭ-стоповые элепенты
I
О
О
| Устройство для опознания номеров транспортных средств | 1980 |
|
SU951353A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
