сл
С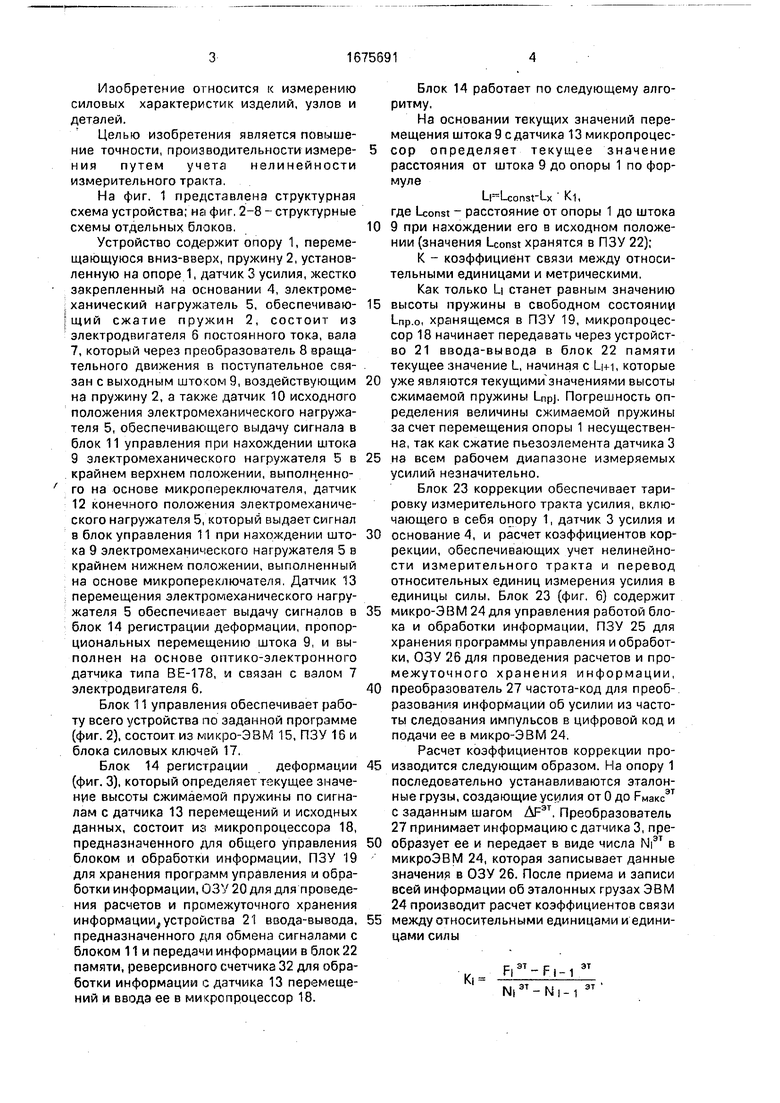
Изобретение относится к области измерения силовых характеристик узлов и деталей. Целью изобретения является повышение точности, производительности измерения. Измеряемая пружина 2 устанавливается на опору 1. Шток 9 перемещается электродвигателем 6 по команде блока 11 управления. Блок 14 регистрации отслеживает перемещение штока 9. При сжатии пружины 2 на определенную величину блок 11 управления включает блок 28 регистрации усилия, который производит замер усилия пружины 2 в данном положении, и т.д. до поступления сигнала с датчйка 12 конечного положения. Блок 11 управления дает команду на реверс, и шток 9 начинает подниматься. На блоке 35 отображе- ния информации индицируется информация характеристики пружины 2. 1 з.п. ф-лы, 8 ил.
о
а
о о
Изобретение относится к измерению силовых характеристик изделий, узлов и деталей.
Целью изобретения является повышение точности, производительности измерения путем учета нелинейности измерительного тракта.
На фиг. 1 представлена структурная схема устройства; на фиг, 2-8 - структурные схемы отдельных блоков.
Устройство содержит опору 1, перемещающуюся вниз-вверх, пружину 2, установленную на опоре 1, датчик 3 усилия, жестко закрепленный на основании 4, электромеханический нагруж;зтель 5, обеспечиваю- щий сжатие пружин 2, состоит из электродвигателя 6 постоянного тока, вала 7, который через преобразователь 8 вращательного движения в поступательное связан с выходным 9, воздействующим на пружину 2, а также датчик 10 исходного положения электромеханического нагружа- теля 5, обеспечивающего выдачу сигнала в блок 11 управления при нахождении штока 9 электромеханического нагружателя 5 в крайнем верхнем положении, выполненного на основе микропереключателя, датчик 12 конечного положения электромеханического нагружателя 5, который выдает сигнал в блок управления 11 при нахождении штока 9 электромеханического нагружателя 5 в крайнем нижнем попожении, выполненный на основе микропереключателя. Датчик 13 перемещения электромеханического нагружателя 5 обеспечивает выдачу сигналов в блок 14 регистрации деформации, пропорциональных перемещению штока 9, и ЕШ- полнен на основе оптико-электронного датчика типа ВЕ-178, и связан с валом 7 электродвигателя 6,
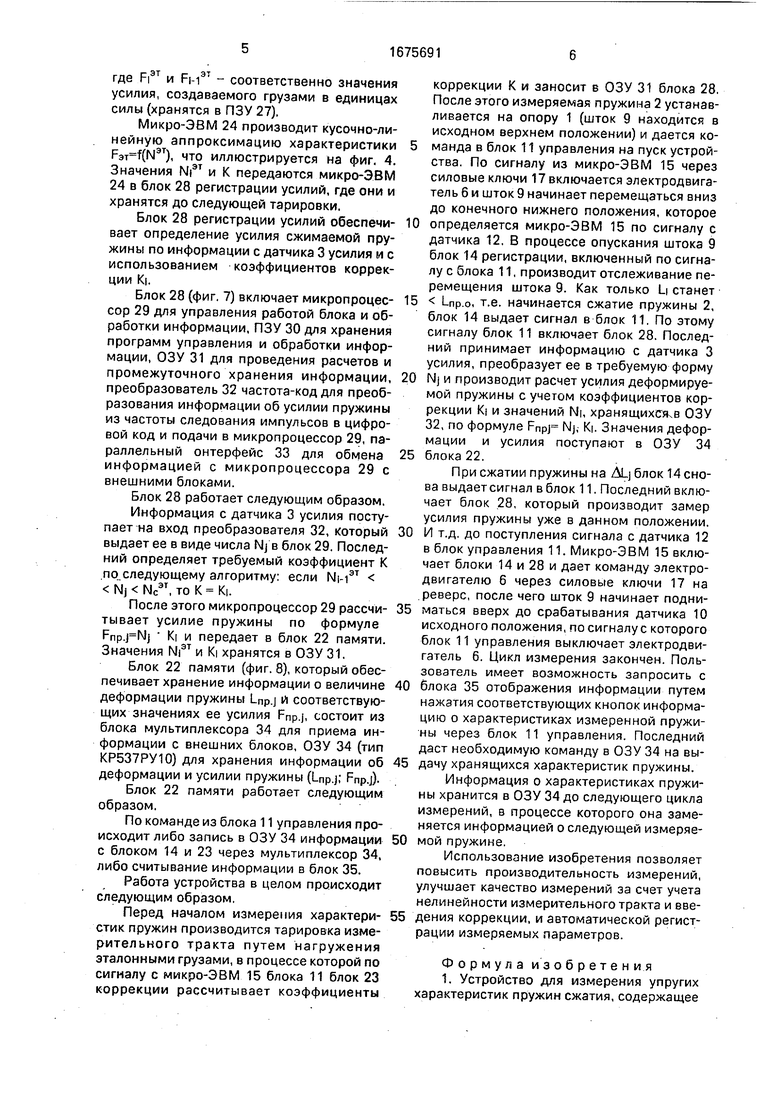
Блок 11 управления обеспечивает работу всего устройства по заданной программе (фиг. 2), состоит из микро-ЭВМ 15, ПЗУ 16 и блока силовых ключей 17.
Блок 14 регистрации деформации (фиг. 3), который определяет текущее значение высоты сжимаемой пружины по сигналам с датчика 13 перемещений и исходных данных, состоит из микропроцессора 18, предназначенного для общего управления блоком и обработки информации, ПЗУ 19 для хранения программ управления и обработки информации, ОЗУ 20 для для проведения расчетов и промежуточного хранения информации устройства 21 ввода-вывода, предназначенного для обмена сигналами с блоком 11 и передачи информации в блок 22 памяти, реверсивного счетчика 32 для обработки информации с датчика 13 перемещений и ввода ее в микропроцессор 18.
Блок 14 работает по следующему алгоритму.
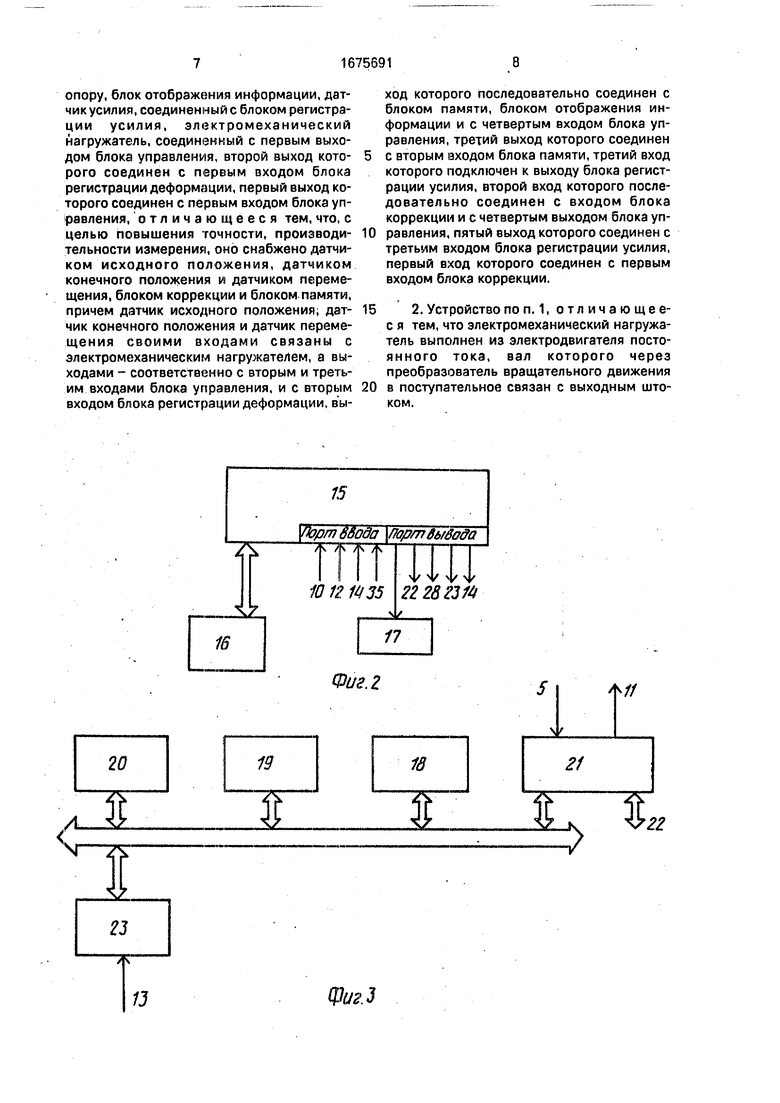
На основании текущих значений перемещения штока 9 с датчика 13 микропроцессор определяет текущее значение расстояния от штока 9 до опоры 1 по формуле
Li Lconst-Lx Kt, где Uonst - расстояние от опоры 1 до штока
9 при нахождении его в исходном положении (значения Uonst хранятся в ПЗУ 22);
К - коэффициент связи между относительными единицами и метрическими.
Как только LI станет равным значению
высоты пружины в свободном состоянии Lnp.ot хранящемся в ПЗУ 19, микропроцессор 18 начинает передавать через устройство 21 ввода-вывода в блок 22 памяти текущее значение L, начиная с U-и, которые
уже являются текущими значениями высоты сжимаемой пружины Upj. Погрешность определения величины сжимаемой пружины за счет перемещения опоры 1 несущественна, так как сжатие пьезоэлемента датчика 3
на всем рабочем диапазоне измеряемых усилий незначительно.
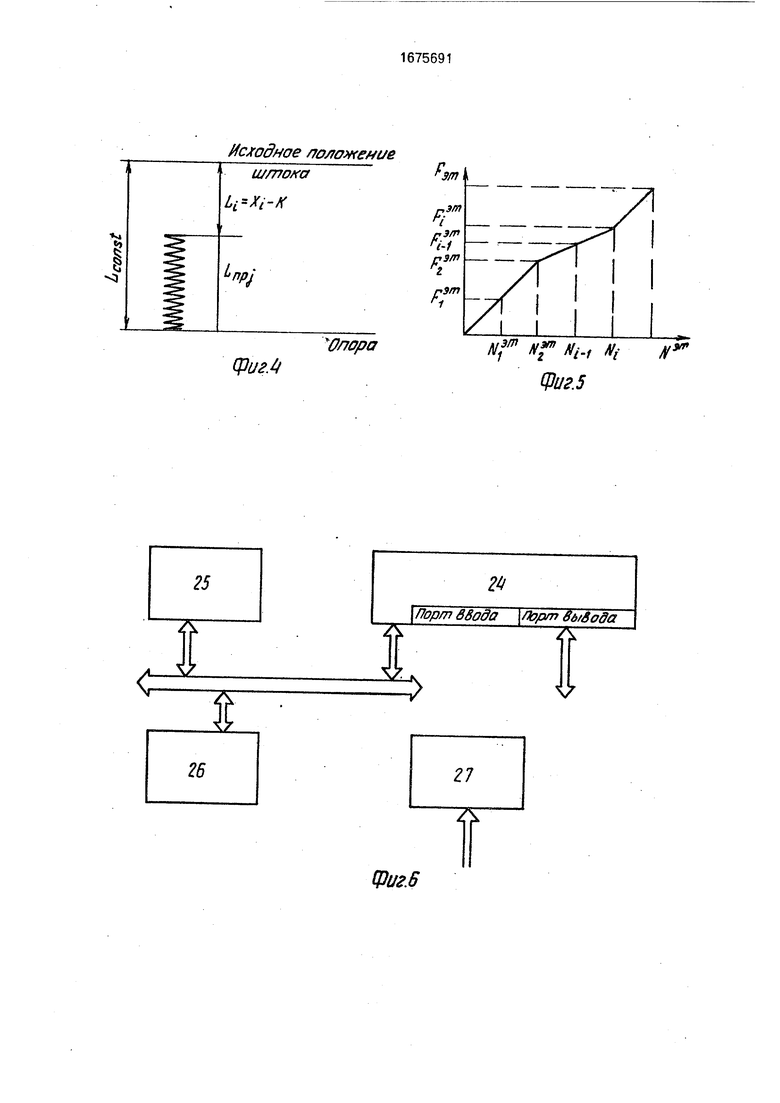
Блок 23 коррекции обеспечивает тарировку измерительного тракта усилия, включающего в себя опору 1, датчик 3 усилия и
основание 4, и расчет коэффициентов коррекции, обеспечивающих учет нелинейности измерительного тракта и перевод относительных единиц измерения усилия в единицы силы. Блок 23 (фиг. 6) содержит
микро-ЭВМ 24 для управления работой блока и обработки информации, ПЗУ 25 для хранения программы управления и обработки, ОЗУ 26 для проведения расчетов и промежуточного хранения информации,
преобразователь 27 частота-код для преобразования информации об усилии из частоты следования импульсов в цифровой код и подачи ее в микро-ЭВМ 24.
Расчет коэффициентов коррекции производится следующим образом. На опору 1 последовательно устанавливаются эталонные грузы, создающие усилия от 0 до РМаксэт с заданным шагом ДРЭТ. Преобразователь 27 принимает информацию с датчика 3, преобразует ее и передает в виде числа Ni3T в микроЭВМ 24, которая записывает данные значения в ОЗУ 26. После приема и записи всей информации об эталонных грузах ЭВМ 24 производит расчет коэффициентов связи
между относительными единицами и единицами силы
К.
F|3T-Fi-i
N|3T-N|-1
где Fi3T и Fi-i3T - соответственно значения усилия, создаваемого грузами в единицах силы (хранятся в ПЗУ 27),
Микро-ЭВМ 24 производит кусочно-линейную аппроксимацию характеристики (N3T), что иллюстрируется на фиг. 4. Значения Ni3T и К передаются микро-ЭВМ 24 в блок 28 регистрации усилий, где они и хранятся до следующей тарировки.
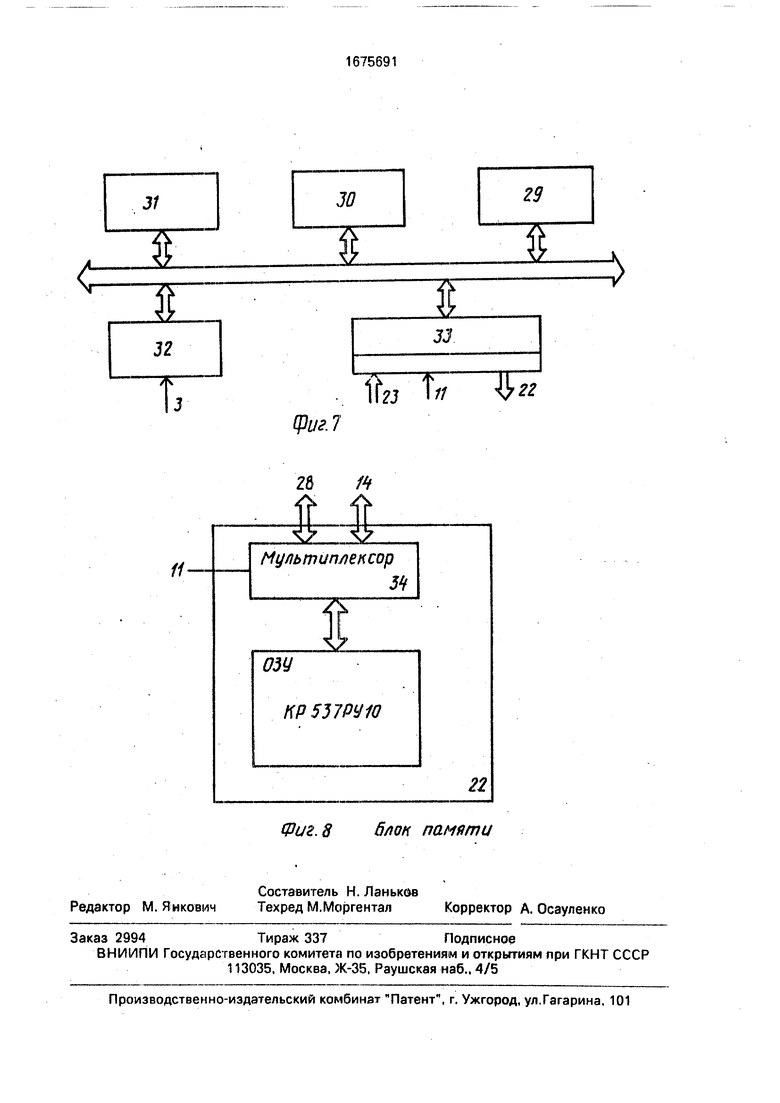
Блок 28 регистрации усилий обеспечивает определение усилия сжимаемой пружины по информации с датчика 3 усилия и с использованием коэффициентов коррекции К|.
Блок 28 (фиг. 7) включает микропроцессор 29 для управления работой блока и обработки информации, ПЗУ 30 для хранения программ управления и обработки информации, ОЗУ 31 для проведения расчетов и промежуточного хранения информации, преобразователь 32 частота-код для преобразования информации об усилии пружины из частоты следования импульсов в цифровой код и подачи в микропроцессор 29, параллельный онтерфейс 33 для обмена информацией с микропроцессора 29 с внешними блоками.
Блок 28 работает следующим образом.
Информация с датчика 3 усилия поступает на вход преобразователя 32, который выдает ее в виде числа NJ в блок 29. Последний определяет требуемый коэффициент К по следующему алгоритму: если Мизт NJ Мсэт, то К Ki.
После этого микропроцессор 29 рассчитывает усилие пружины по формуле Fnp. KI и передает в блок 22 памяти. Значения NIST и KI хранятся в ОЗУ 31.
Блок 22 памяти (фиг. 8), который обеспечивает хранение информации о величине деформации пружины Lnp.j и соответствующих значениях ее усилия Fnp.j, состоит из блока мультиплексора 34 для приема информации с внешних блоков, ОЗУ 34 (тип КР537РУ10) для хранения информации об деформации и усилии пружины (Lnp.j; Fnp.j).
Блок 22 памяти работает следующим образом.
По команде из блока 11 управления происходит либо запись в ОЗУ 34 информации с блоком 14 и 23 через мультиплексор 34, либо считывание информации в блок 35.
Работа устройства в целом происходит следующим образом.
Перед началом измерения характеристик пружин производится тарировка изме- рительного тракта путем нагружения эталонными грузами, в процессе которой по сигналу с микро-ЭВМ 15 блока 11 блок 23 коррекции рассчитывает коэффициенты
коррекции К и заносит в ОЗУ 31 блока 28. После этого измеряемая пружина 2 устанавливается на опору 1 (шток 9 находится в исходном верхнем положении) и дается ко- 5 манда в блок 11 управления на пуск устройства. По сигналу из микро-ЭВМ 15 через силовые ключи 17 включается электродвигатель 6 и шток 9 начинает перемещаться вниз до конечного нижнего положения, которое
0 определяется микро-ЭВМ 15 по сигналу с датчика 12, В процессе опускания штока 9 блок 14 регистрации, включенный по сигналу с блока 11, производит отслеживание перемещения штока 9. Как только U станет
5 Lnp.o, т.е. начинается сжатие пружины 2, блок 14 выдает сигнал в блок 11. По этому сигналу блок 11 включает блок 28. Последний принимает информацию с датчика 3 усилия, преобразует ее в требуемую форму
0 NJ и производит расчет усилия деформируемой пружины с учетом коэффициентов коррекции Ki и значений NI, хранящихся ОЗУ 32, по формуле Fnpj NJ, KI. Значения деформации и усилия поступают в ОЗУ 34
5 блока 22.
При сжатии пружины на Д1 блок 14 снова выдаетсигнал в блок 11. Последний включает блок 28, который производит замер усилия пружины уже в данном положении.
0 И т.д. до поступления сигнала с датчика 12 в блок управления 11. Микро-ЭВМ 15 включает блоки 14 и 28 и дает команду электродвигателю 6 через силовые ключи 17 на реверс, после чего шток 9 начинает подни5 маться вверх до срабатывания датчика 10 исходного положения, по сигналу с которого блок 11 управления выключает электродвигатель 6. Цикл измерения закончен. Пользователь имеет возможность запросить с
0 блока 35 отображения информации путем нажатия соответствующих кнопок информацию о характеристиках измеренной пружины через блок 11 управления. Последний даст необходимую команду в ОЗУ 34 на вы5 дачу хранящихся характеристик пружины.
Информация о характеристиках пружины хранится в ОЗУ 34 до следующего цикла измерений, в процессе которого она заменяется информацией о следующей измеряе0 мой пружине.
Использование изобретения позволяет повысить производительность измерений, улучшает качество измерений за счет учета нелинейности измерительного тракта и вве5 дения коррекции, и автоматической регистрации измеряемых параметров.
Формула изобретения 1. Устройство для измерения упругих характеристик пружин сжатия, содержащее
опору, блок отображения информации, датчик усилия, соединенный с блоком регмстра- ции усилия, электромеханический нагружатель, соединенный с первым выходом блока управления, второй выход кото- рого соединен с первым входом блока регистрации деформации, первый выход которого соединен с первым входом блока управления, отличающееся тем, что, с целью повышения точности, производи- тельности измерения, оно снабжено датчиком исходного положения, датчиком конечного положения и датчиком перемещения, блоком коррекции и блоком памяти, причем датчик исходного положения; дат- чик конечного положения и датчик перемещения своими входами связаны с электромеханическим нагружателем, а выходами - соответственно с вторым и третьим входами блока управления, и с вторым входом блока регистрации деформации, вы
Vbpm йвада ffapm вывоза
I ШМ II I .Д-Циии - м-
ТТТТТТТТГ
1012 М 35 222&Ш4
16
Фиг. 2
20
19
Л
ч
/3
Щиг.З
ход которого последовательно соединен с блоком памяти, блоком отображения информации и с четвертым входом блока управления, третий выход которого соединен с вторым входом блока памяти, третий вход которого подключен к выходу блока регистрации усилия, второй вход которого последовательно соединен с входом блока коррекции и с четвертым выходом блока управления, пятый выход которого соединен с третьим входом блока регистрации усилия, первый вход которого соединен с первым входом блока коррекции.
2, Устройство по п. 1, отличающее- с я тем, что электромеханический нагружатель выполнен из электродвигателя постоянного тока, вал которого через преобразователь вращательного движения в поступательное связан с выходным штоком.
18
Исходное положение
штока
1
О
npj
ОригА
0лора
25
С
I
26
э/п
Pi fit
эт
F
гэт Аг
«Г НН Н(
N
JW
фиг.5
гь
Порт ввода /ЪрглВб/6ода
4
V
27
фиг.6
| Устройство для измерения упругих характеристик пружин | 1982 |
|
SU1016700A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка для испытания пружинныхМЕХАНизМОВ | 1979 |
|
SU805083A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
