1
Изобрэтение относится к испытанию изделий и конструкций.
Известна установка для испытания пружин, включающая нагрузочное приспособление, механизм подачи пружин и измерительные блоки 1.
Недостатками этой установки является малый диапазон измерений и невозможность получения зависимости усилия от величины деформации во всем диапазоне измерений.
Наиболее близка к предлагаемой по технической сущности и достигаемому результату установка, включающая диаграм 1ный аппарат, соединенный с системами измерения деформации и усилия, блок цифровой информации, электропривод, кинематически связанный с датчиками деформаций и усилий систем измерения 2).
Недостатками этой установки являются отсутствие автоматизации процесса испытания и невысокая точность замера усилия.
Цель изобретения - автоматизация процесса испытания и повыиение точности измерений усилия.
Поставленная цель достигается тем, что установка для испытания пружинных механизмов, вк.пючающая диграммный аппарат, соединенный с истемами измерения деформации и силия, блок цифровой информации, лектропривод, кинематически связанг
ный с датчиками деформаций и усилий систем измерения, снабжена блоком задания предельных деформаций, коммутатором электропривода и схемой совпадения, входы которой соединены
с выходами блока задания предельных
деформаций и с цифровыми выходами блока цифровой индикации, а выход схемы совпадения соединен с первым входом коммутатора, при этом второй
вход коммутатора соединен со знаковым выходом блока цифровой индикаци а выходы коммутатора соединены с электроприводом.
Кроме того, датчик усилия выполни в виде индуктивного преобразователя с подвижным элементом и упругой консоли, причем преобразователь установлен с возможностью перемещения
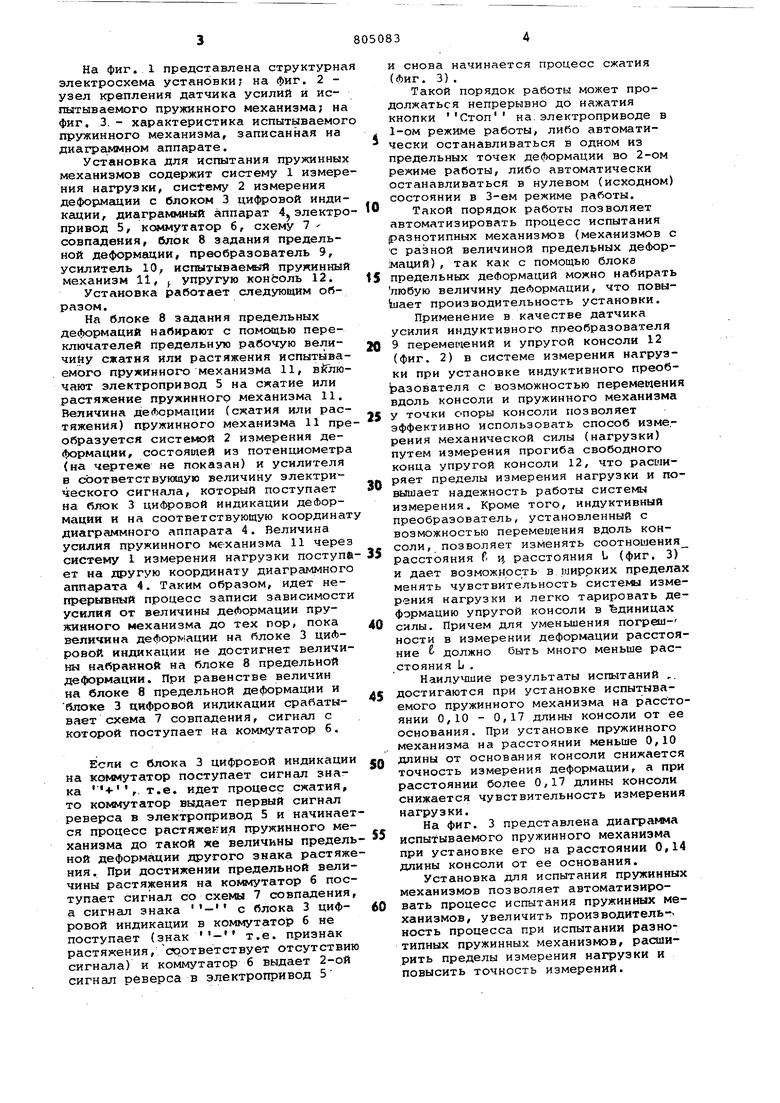
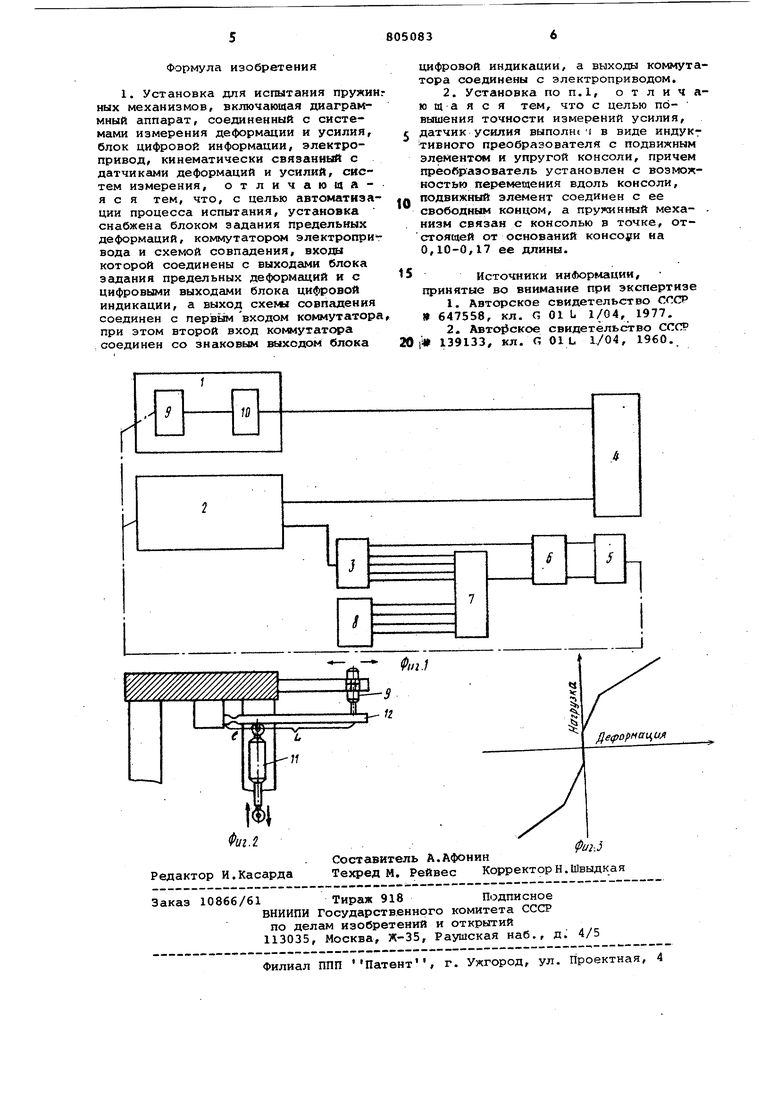
вдоль консоли, подвижный элемент соединен с ее свободным концом, а пружинный механизм связан с когсолью в точке, отстоящей от основания консоли на 0,10 - 0,17 ее длины. На фиг. 1 представлена структурн электросхема установки; на фиг. 2 узел крепления датчика усилий и испытываемого пружинного механизма; н фиг, 3, - характеристика испытываемо пружинного механизма, записанная на диаграммном аппарате, Установка для испытания пружинны механизмов содержит систему 1 измер ния нагрузки, сис1ему 2 измерения деформации с блоком 3 цифровой инди кации, диаграммный аппарат 4 электр привод 5, ксилмутатор 6, схему 7 совпадения, блок 8 задания предельной деформации, преобразователь 9, усилитель 10, испытываемой пружинны механизм 11, j упругую конЬоль 12. Установка работает следующим oftраэом. На блоке 8 задания предельных деформаций набирают с помсяцью переключателей предельную рабочую величийу сжатия или растяжения испытыва емого пружинного механизма 11, вйлю чают электропривод 5 на сжатие или растяжение пружинного механизма 11. Величина деЛормации (сжатия или рас тяжения) пружинного механизма 11 пр образуется системой 2 измерения деформации, состоящей из потенциометр (на чертеже не показан) и усилителя в сЬответствуккцую величину электрического сигнала, который поступает на Олок 3 цифровой индикации деформации и на соответствующую координа диаграммного аппарата 4. Величина усилия пружинного механизма 11 чере систему 1 измерения нагрузки поступ ет на другую координату диаграммного аппарата 4. Таким образом, идет непрерывный процесс записи зависимости усилия от величины деформации пружинного механизма до тех пор, пока величина деформации на блоке 3 цифровой индикации не достигнет величины набранной на блоке 8 предельной деформации. При равенстве величин на блоке 8 предельной деформации и блоке 3 цифровой индикации срабатывает схема 7 совпадения, сигнал с которой поступает на коммутатор б. Еспи с блока 3 цифровой индикации на коммутатор поступает сигнал знака «,. т.е. идет процесс сжатия, то коивиутатор выдает первый сигнал реверса в электропривод 5 и начинает ся процесс растяжения пружинного механизма до такой же величины предель ной деформации другого знака растяже ния . При достижении предельной величины растяжения на ко«да утатор б поступает сигнал со схемы 7 совпещения, а сигнал знака - с блока 3 цифровой индикации в коммутатор б не поступает (знак - т.е. признак растяжения, с ортветствует отсутствию сигнала) и коммутатор 6 выдает 2-ой сигнал реверса в электропривод 5 и снова начинается процесс сжатия (Фиг. 3). Такой порядок работы может продолжаться непрерывно до нажатия кнопки Стоп на.электроприводе в 1-ом режиме работы, либо автоматически останавливаться в одном из предельных точек деформации во 2-ом режиме работы, либо автоматически останавливаться в нулевом (исходном) состоянии в 3-ем режиме работы. Такой порядок работы позволяет автоматизировать процесс испытания разнотипных механизмов (механизмов с с разной величиной предельных дефор1маций) , так как с помощью блока предельных деформаций можно набирать любую величину деформации, что повыЫает производительность установки. Применение в качестве датчика усилия индуктивного преобразователя 9 перемесчений и упругой консоли 12 (фиг. 2) в системе измерения нагрузки при установке индуктивного преоб1разователя с возможностью перемещения вдоль консоли и пружинного механизма у точки опоры консоли позволяет эффективно использовать способ изме,рения механической силы (нагрузки) путем измерения прогиба свободного конца упругой консоли 12, что расширяет пределы измерения нагрузки и повышает надежность работы системы измерения. Кроме того, индуктивный преобразователь, установленный с возможностью перемев1ения вдоль консоли, позволяет изменять соотношения расстояния С ц расстояния L (фиг. 3) и дает возможность в широких пределах менять чувствительность системы измерения нагрузки и легко тарировать деформацию упругой консоли в Единицах силы. Причем для уменьшения погрешности в измерении деформации расстояние должно быть много меньше расстояния Ь . Наилучшие результаты испытаний ,. достигаются при установке испытываемого пружинного механизма на расстоянии 0,10 - 0,17 длины консоли от ее основания. При установке пружинного механизма на расстоянии меньше 0,10 длины от основания консоли снижается точность измерения деформации, а при расстоянии более 0,17 длины консоли снижается чувствительность измерения нагрузки. На фиг. 3 представлена диаграмма испытываемого пружинного механизма при установке его на расстоянии 0,14 длины консоли от ее основания. Установка для испытания пружинных механизмов позволяет автоматизировать процесс испытания пружинных механизмов, увеличить производитель-ность процесса при испытании разнотипных пружинных механизмов, расширить пределы измерения нагрузки и повысить точность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения предельного напряжения деформации вязко-пластичных материалов | 1990 |
|
SU1744565A1 |
| Устройство для контроля упругих и линейных характеристик пружин | 1985 |
|
SU1270590A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТАБИЛЬНОСТИ ВАКУУМА ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2153800C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ СПУСКА ОБЪЕКТА ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ В СКВАЖИНЕ | 1999 |
|
RU2168624C1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Устройство для дозирования жидкого металла | 1990 |
|
SU1756016A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ | 2002 |
|
RU2209307C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СОСТОЯНИЯ НЕПРИГОДНОСТИ КАНАТА ИЗ ВЫСОКОПРОЧНЫХ ВОЛОКОН, ИСПОЛЬЗУЕМОГО В ГРУЗОПОДЪЕМНОМ МЕХАНИЗМЕ | 2012 |
|
RU2562821C2 |
