Изобретение относится к автоматическому управлению, в частности к цифровым следящим системам с управляющими ЭВМ в замкнутом контуре, и может быть использовано для управления станками с ЧПУ, построенными с применением следящих приводов подач.
Цель изобретения - повышение точности системы программного управления.
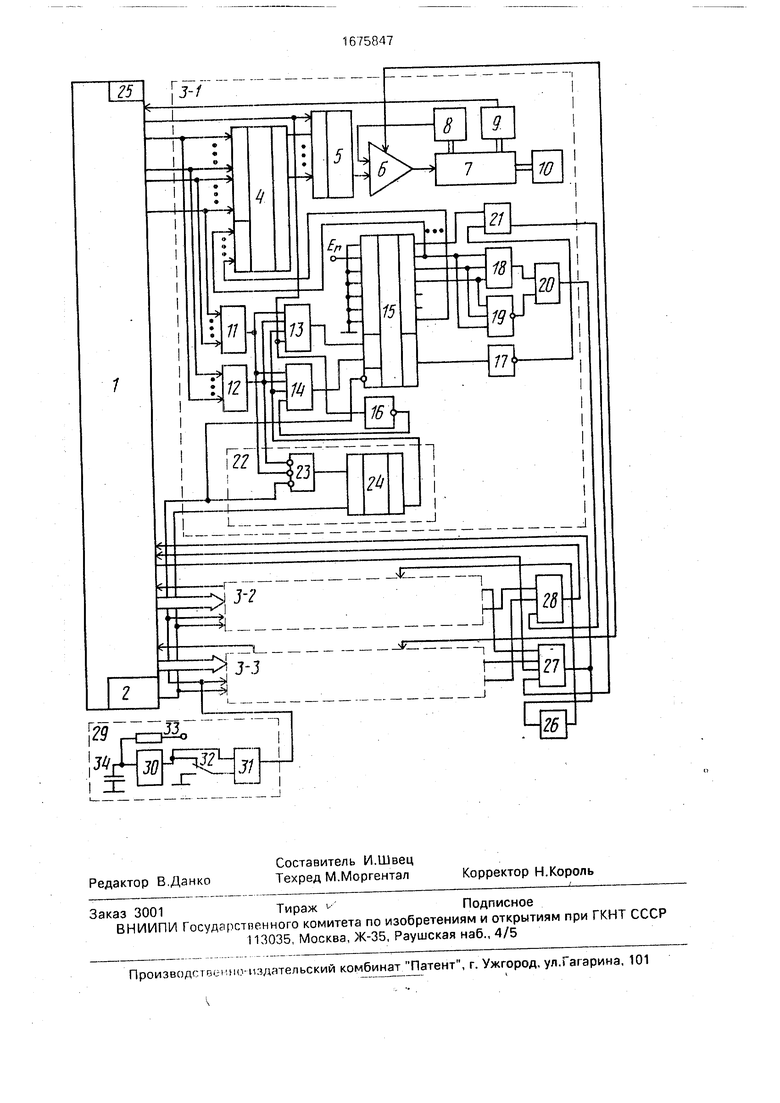
На чертеже представлена структурно- функциональная схема системы программного управления.
Система программного управления содержит блок 1 вычисления управляющих сигналов, таймер 2, каналы 3-1-3-3 управления рабочими органами, включающие сумматор 4, цифроаналоговый преобразователь 5, усилитель 6, исполнительный механизм 7, датчик 8 скорости, датчик 9 положения, рабочий орган 10, блок 11 определения наличия рассогласования (элемент ИЛИ), блок 12 определения режима коррекции (элемент ИЛИ-НЕ), элементы И 13 и 14, реверсивный счетчик 15 импульсов, инверторы 16 и 17,
элемент И 18, элемент ИЛИ-НЕ 19, элементы ИЛИ 20 и 21, фильтр 22 нижних частот, включающий элемент НЕ-ИЛИ 23. счетчик 24, блок 25 индикации, блока 25 аварийного отключения, элементы ИЛИ 27 и 28, блок 29 пуска и начальной установки, включающий формирователь 30, элемент И 31, тумблер 32, резистор 33 и конденсатор 34.
В исходном состоянии после включения питания блок 1 вычисления управляющих сигналов реализует функции управления рабочими органами станка. Управляющие воздействия через его выходные шины подаются на входы каналов 3-1-3-3 управления рабочими органами станка. Текущие значения данных воздействий изменяются дискретно через интервалы времени, определяемые таймером 2. В каждом из каналов 3-1-3-3 управляющая информация через сумматор 4 поступает на цифроана- логовый преобразователь 5, с выхода которого поступает на усилитель 6, выходной сигнал которого приводит в движение посредством исполнительного механизма 7 механически связанные датчик 8 скорости, датчик 9 положения и рабочий орган 10. При этом информационный сигнал с датчика 9 положения заведен в блок 1.
Выходы младших информационных разрядов блока 1 вычисления управляющих сигналов соединены с входами блока 11 определения наличия рассогласования, на выходе которого формируется сигнал логической единицы в случае наличия на любом из его входов уровня логической единицы. Выходы старших информационных разрядов блока 1 вычисления управляющего сигнала соединены с входами блока 12 определения режима коррекции, на выходе которого появляется сигнал логической единицы при отсутствии задания на перемещение (т.е. при наличии нулей на старших информаци- . онных разрядах блока 1)Элементы И 13 и 14 пропускают или блокируют прохождение сигнала таймера 2 на входы реверсивного счетчика 15 импульсов. Первый инвертор 16 соединен со знаковым разрядом блока 1 и служит для открывания одного из элементов И 13 и 14 в зависимости от знака рассогласования.
Элементы И 18 и 19 ИЛИ-НЕ подключены к выходам реверсивного счетчика 15 импульсов и вместе с элементом ИЛИ 20 предназначены для формирования предупреждающего сигнала о превышении компенсируемой погрешности допустимой величины. Второй элемент ИЛИ 21 служит для формирования аварийного сигнала высокого уровня. Фильтр 22 нижних частот
определяет частоту записи информации в реверсивный счетчик 15 импульсов.
Блок 26 аварийного отключения предназначен для блокировки работы
усилителей 6 каждого из каналов 3-1-3-3 управления рабочими органами станка при появлении сигнала логической единицы на первом выходе любого из указанных блоков, поступающего в блок 26 через элемент
0 ИЛИ 27 или при появлении управляющего сигнала с выхода блока 1 вычисления управляющих сигналов.
Блок 29 пуска и начальной установки предназначен для установки системы в ис5 ходное состояние. Он обеспечивает задержку запуска, необходимую для завершения переходных процессов после включения питания, а также осуществляет запись в счетчик определенного числа, набранного на
0 информационных входах счетчика 15 импульсов (в данном случае числа 32). Блок содержит также тумблер, включающий наладочный режим работы сиртемы, который необходим для регулировки аналоговой ча5 сти системы.
При переключении тумблера 32 в нижнее по схеме положение на входе счетчика 15 импульсов формируется сигнал низкого уровня, а на выходе счетчика будет число 32,
0 которое поступит на входы В1-В6 сумматора 6. При нулевом задании на перемещение на входах А1-Ап (в нашем случае п-13) путем регулировки усилителя 6 устанавливается число, равное нулю. На выходах S1-Sn сум5 матора будет число 32, которое равно сумме чисел на входах А и В и принято за нуль для системы управления. В процессе работы системы число на входах А1-Ап будет изменяться при появлеаии дрейфа нуля
0 аналоговой части схемы, в то же время формирование корректирующих импульсов на входах счетчика 15 вызывает изменение состояния его выходов несоответственно, числа на входах В1-В6 сумматора 4. Система
5 управления будет стремиться к устойчивому состоянию, при котором число на входах А1-Ап будет равно нулю за счет изменения данных на входах В1-В6 (при условии нулевого задания на перемещение). С точки зре0 ния сумматора различия между старшими и младшими разрядами нет.
Система программного управления работает следующим образом.
При переводе системы в рабочий режим
5 тумблером 32 или после выдержки времени, после включения питания на выходе элемента И 31 появляется высокий потенциал, снимающий блокировку работы счетчиков 15 и 24 импульсов. Как правило, задание на перемещение рабочего органа в этих случаях отсутствует, т.е. в старших разрядах, подключенных к входам блока 12 определения режима коррекции, отсутствует управляющая информация и на выходе последнего формируется уровень логической единицы, поступающий на ВУОД элемента НЕ-ИЛИ 23.
Наличие на одном из входов элемента НЕ-ИЛИ 23 сигнала логического нуля приведет к блокировке работы счетчика 24. Это возможно при возникновении одного из следующих условий:
наличие сигнала низкого уровня на выходе блока 29 пуска и начальной установки (режим коррекции отключен);
отсутствие сигналов единичного уровня на выходах младших разрядов блока 1 (нет рассогласования)и,следовательно, присутствие на выходе блока 11 определения наличия рассогласования сигнала низкого уровня;
наличие одного или нескольких сигналов единичного уровня на выходах старших разрядов блока 1 (есть задание ка перемещение) и, следовательно, присутствие на выходе блока 12 определения режима коррекции сигнала низкого уровня.
В указанных трех случаях работа счетчика 24 заблокирована. Счетчик 24 может изменять свое содержимое только в том случае, когда снята блокировка по входу R (на выходе R присутствует сигнал логического нуля).
При наличии рассогласования (т.е. при отклонении фактического положения рабочего органа 10 от заданного), обусловленного дрейфом нуля характеристик цифроаналогового преобразователя 5, усилителя б и другими факторами, на выходе блока 1 вычисления управляющих сигналов в младших информационных разрядах присутствует управляющий сигнал, обеспечивающий неподвижность рабочего органа. Соответственно, на выходе блока 11 определения наличия рассогласования устанавливается высокий потенциал,- который поступает на входы элементов И 13,14 и 23. При этом счетчик 24 импульсов начинает считать импульсы, поступающие с выхода таймера 2.
Если за то время, пока на выходе счетчика 24 импульсов не появится импульс, рабочий орган вернется в заданное положение, то накопленное счетчиком число импульсов таймера 2 будет сброшено сигналом низкого уровня, поступившим с блока 11. Если же этого не произойдет, то при переполнении счетчика 24 импульсов сигнал с его выхода поступит на соответствующий знаку рассогласования вход счетчика 15 импульсов и изменит его содержимое. Соответственно изменится величина управляющего воздействия на выходе сумматора 4, выходе усилителя 6. С приходом следующего импульса с выхода счетчика 24 импульсов процесс повторится, Рабочий орган при этом начнет возвращаться в заданное положение, величина рассогласования уменьшится за счет информации, поступающей в
0 блок 1 вычисления управляющих сигналов с датчика 9 положения. Данный процесс будет продолжаться до тех пор, пока величина рассогласования не станет равной нулю и, тем самым, не будет заблокирована рабо5 та счетчика 24 импульсов.
В дальнейшей работе системы программного управления работа рабочих органов будет чередоваться с паузами. В этом режиме фильтр 22 нижних частот будет выпол0 нять еще одну функцию. Это связано с тем, что завершение перемещения рабочего органа, когда исчезает управляющая информация в старших выходных разрядах блок 1 вычисления управляющих сигналов, вызы5 вает появление разрешающего работу фильтра 22 уровня на выходе блока 12, а в младших разрядах еще присутствует управляющая информация, которая исчезает только после полного завершения переме0 щения. На это необходимо некоторое время. Для обеспечения этого времени и осуществляется при каждом задаваемом блоком 1 перемещения сброс счетчиков 24 импульсов.
5 Так как дрейф аналоговых элементов схемы - медленный процесс по сравнению со скоростью (частотой) формирования импульсов таймера 2, то с точки зрения качества управления нет необходимости вносить
0 коррекцию (т.е. изменять содержимое счетчика 15) с высокой скоростью. Быстрая реакция системы программного управления на изменение информации младших разрядов блока 1 может привести к потере устой5 чивости системы при возникновении случайных отклонений положения рабочего органа 10 от заданного. Предотвратить потерю устойчивости позволяет фильтр 22 нижних частот. Учитывая, что в нашем слу0 чае частота следования импульсов таймера составляет 70 Гц, а частота импульсов коррекции, обеспечивающая устойчивость системы с одновременным качеством управления (коррекции), равна 0,2-0,5 Гц, то
5 коэффициент пересчета должен быть равным 140-350. Выбран коэффициент пересчета счетчика 24, равный 256.
Разрядность счетчика 15 выбрана таким образом, чтобы наряду со сравнительно широким диапазоном коррекции +32 дискреты
обеспечивалось отключение каналов 3-1-3- 3 в случае аномально большого дрейфа, вызываемого внештатными ситуациями в системе программного управления. В большей части коэффициент пересчета счетчика 15 получен эмпирическим путем.
Абсолютная величина дрейфа нуля аналоговых элементов зависит от многих факторов. Практически, приведенная к входу усилителя величина дрейфа нуля может со- ставлять 5-15 мВ, что вызывает величину рассогласования 3-10 дискрет (3-10 мкм). В соответствии с этим выбран диапазон допустимого изменения рассогласования. Если содержимое счетчика 15 импульсов станет равным числу 56 или числу 7 в зависимости от того, в какую сторону смещал содержимое счетчика дрейф нуля, то на выходе элемента И 18 или на выходе элемента ИЛИ-НЕ 19 появится сигнал высокого уров- ня, который через соответствующие входы элементов ИЛИ 20 и ИЛИ 28 поступит в блок 1 вычислений управляющих сигналов для отображения блоком 25 предупреждающего сообщения о том, что система программ- ного управления находится в состоянии, близком к срабатыванию блока 26 аварийного отключения.
При дальнейшем наращивании или уменьшении содержимого счетчика 15 на его выходе 26 (число 64) или на инверсном выходе переполнения р (число 00) появится сигнал, который через соответствующие входы элементов ИЛИ 21 и ИЛИ 27 поступит в блок 1 вычисления и на вход блока 26 аварийного отключения, что вызовет блокировку работы усилителей 6 каналов 3-1-3-3 и выдачу сообщения о причине останова на блок 25 индикации.
Данная система программного управле- ния по сравнению с известной обеспечивает более высокую точность отработки перемещений рабочими органами и, соответственно, более высокую точность обработки деталей за счет компенсации погрешностей дрейфа нуля характеристик аналоговых элементов системы, Кроме того, упрощается эксплуатация системы за счет сокращения частоты проведения регламентных работ, так как дрейф нуля аналоговых элементов вызывается не только за счет изменения температуры, но и из-за изменения величин питающих напряжений и других эксплуатационных факторов.
Формула изобретения
Система для программного управления, содержащая блок вычисления управляющих сигналов, таймер, блок аварийного отключения, блок индикации и блоки управления
рабочими органами станка по числу управляемых координат, каждый из которых содержит цифроаналоговый преобразователь, выход которого соединен с первым входом усилителя, исполнительный механизм, к которому подключены датчик скорости и датчик положения, выходы которых подключены соответственно к второму входу усилителя и к первому информационному входу блока вычисления управляющих сигналов, третий вход каждого усилителя под- ключен к выходу блока аварийного отключения, отличающаяся тем, что, с целью повышения точности, в нее введены первый и второй элементы ИЛИ, блок пуска и начальной установки, состоящий из формирователя импульсов, выход которого соединен с первым входом элемента И и через тумблер начальной установки с вторым входом элемента И, вход формирователя импульсов через RC-цепь соединен с источником питания, а в каждый канал управления рабочим органом станка введены сумматор, блок определения режима коррекции, блок определения наличия рассогласования, реверсивный счетчик импульсов, три элемента И, первый и второй инверторы, цифровой фильтр нижних частот, состоящий из счетчика, R-вход которого соединен с выходом элемента НЕ-ИЛИ, выход - с выходом цифрового фильтра нижних частот, первый вход которого подключен к С-входу счетчика, второй вход - к первому входу элемента НЕ-ИЛИ, третий и четвертый входы - соответственно к второму и третьему входам элемента НЕ-ИЛИ, причем первая и вторая группы соответствующих информационных выходов блока вычисления управляющих сигналов подключены к первой группе входов сумматора, к группе входов блока определения режима коррекции и блока определения наличия рассогласования соответственно, разрядные выходы сумматора подключены к группе информационных входов цифроа- налогового преобразователя, знаковый вход которого соединен с первым управляющим выходом блока вычисления управляющих сигналов, выход блока определения режима коррекции подключен к первому входу элемента НЕ-ИЛИ и к первым входам первого и второго элементов И, выход блока определения наличия рассогласования подключен к вторым входам первого и второго элементов И и к второму входу элемента НЕ-ИЛИ, третьи входы первого и второго элементов И соединены с выходом цифрового фильтра нижних частот, четвертый вход второго элемента И подключен к входу знакового разряда цифроаналогового преобразователя. который через первый инвертор подключен к четвертому входу первого Элемента И, выходы первого и второго элементов И подключены к вычитающему и суммирующему счетным входам реверсивного счетчика импульсов, разрядные выходы с первого по шестой которого подключены к второй группе входов сумматора, выходы четвертого, пятого и шестого разрядов реверсивного счетчика импульсов подключены к соответствующим входам третьего элемента И и элемента ИЛ И-НЕ, а инверсный выход переполнения реверсивного счетчика импульсов соединен через второй инвертор с первым входом первого элемента ИЛИ, второй вход которого подключен к выходу седьмого разряда реверсивного счетчика импульсов, вход ввода параллельного кода реверсивного счетчика импульсов соединен с выходом блока пуска и начальной установки и с четвертым входом цифрового фильтра нижних частот каждого канала управления рабочими органами станка, входы разрядов с первого по пятый и седьмой реверсивного счетчика импульсов соединены с шиной задания кода, а шестой вход разряда - с шиной питания, выход третьего элемента И подключен с первому входу второго элемента ИЛИ, выход элемента ИЛ И-НЕ подключен к второму входу второго элемента ИЛИ, выходы первого и второго элементов ИЛИ подключены соответственно к первому входу первого и к
третьему входу второго элементов ИЛИ системы программного управления, второй вход первого элемента ИЛИ соединен с информационным выходом блока вычисления управляющих сигналов, а выход - с входом
блока аварийного отключения, выход которого подключен к второму входу блока вычисления управляющих сигналов, группа входов первого и второго элементов ИЛИ подключены к соответствующим выходам
других каналов управления рабочими органами станка, выход второго элемента ИЛИ соединен с третьим входом блока вычисления управляющих сигналов, вход формирователя импульсов блока пуска и начальной
установки соединен с первыми выводами резистора и конденсатора, а выход - с первым входом элемента И, второй вход которого подключен общему выводу тумблера начальной установки, второй вывод тумблера соединен с общей шиной, а третий вывод - с первым входом элемента И, второй вывод резистора подключен к шине питания, второй вывод конденсатора соединен с общей шиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Плотномер для буровых растворов | 1982 |
|
SU1081468A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЛИВА | 1992 |
|
RU2044470C1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| ФОТОПРИЕМНОЕ УСТРОЙСТВО С КОМПЕНСАЦИЕЙ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 1992 |
|
RU2065669C1 |
Изобретение относится к автоматическому управлению, в частности к цифровым следящим системам с ЭВМ в замкнутом контуре. Цель изобретения - повышение точности. Система программного управления содержит блок вычисления управляющих сигналов, таймер, каналы управления рабочими органами и блок пуска и начальной установки. При работе системы дрейф нуля ЦАПа и усилителя приводит к смещению рабочего органа и датчика. Блок вычисления управляющих сигналов, получая информацию сдатчика положения, формирует управляющее воздействие противоположного знака, возвращающее рабочий орган в заданную координату. В результате возникает величина рассогласования, численно равная приведенной к входу ЦАПа величине дрейфа. Данная величина с соответствующим знаком передается в реверсивный счетчик импульсов, изменяя его содержимое, и суммируется с управляющим воздействием, поступающим с блока вычисления управляющих сигналов. Это приводит к возвращению рабочего органа в заданную координату и уменьшению величины рассогласования до нуля. Компенсация дрейфа осуществляется непрерывно посредством сумматора, определение величины дрейфа - при отсутствии задания на перемещение рабочего органа. В системе предусмотрено формирование предупреждающего сигнала о переполнении реверсивного счетчика импульсов и формирование аварийного сигнала, блокирующего работу усилителей. 1 ил. « О VIСП
| Стародубов B.C., Рогов Б.И | |||
| Диагностика и компенсация погрешностей станков с ЧПУ как средство улучшения их технологического обслуживания и ремонта | |||
| - Сб | |||
| Техническое обслуживание и ремонт станков с ЧПУ | |||
| - М.: МДНТП, 1981, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Система программного управления | 1980 |
|
SU941934A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
