Изобретение относится к устройствам для управления приводными электромагнитами, преимущественно приводными электромагнитами тормозных устройств, и наиболее эффективно может быть использовано в электроприводах подъем но-транс- портных машин.
Цель изобретения - повышение функциональной надежности.
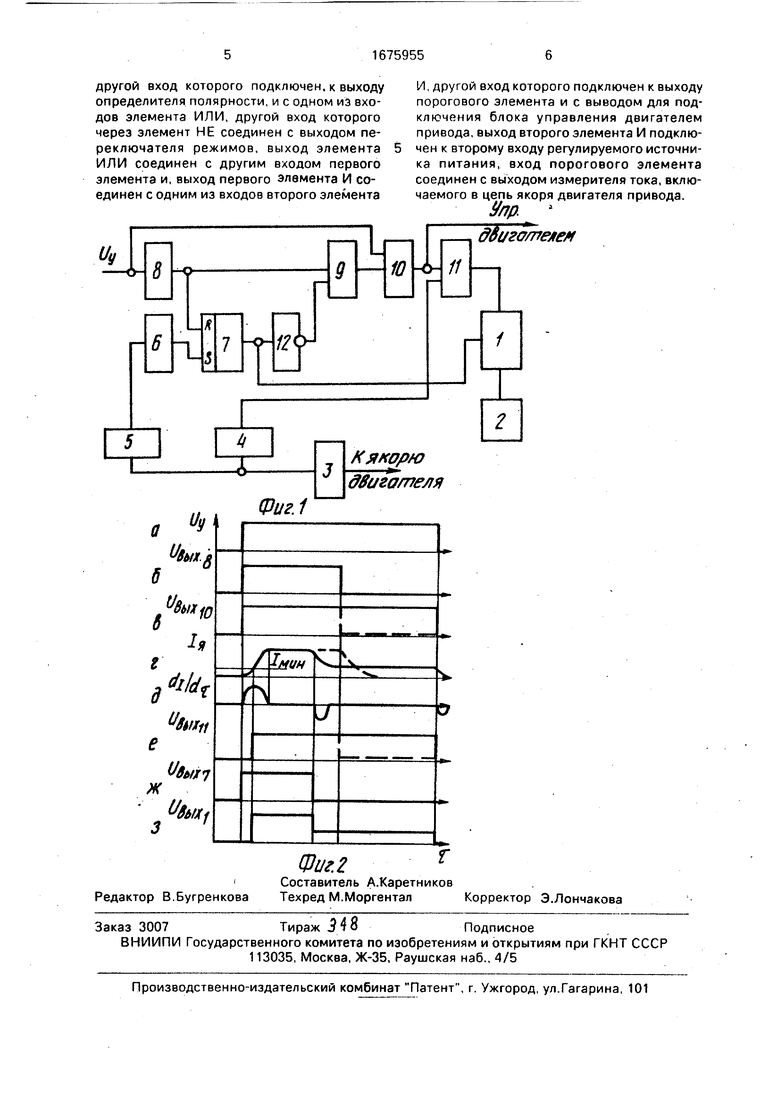
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - графики, иллюстрирующие работу устройства; где представлены напряжения и токи на соответствующих элементах.
Устройство состоит из регулируемого источника 1 питания, к выходу которого подключена обмотка приводного электромагнита 2, измерителя 3 тока, включенного в цепь якоря электродвигателя механизма (не показан), порогового элемента 4 и дифференцирующего блока 5, входы которых соединены с выходом измерителя 3, определителя 6 полярности, вход которого соединен с выходом дифференцирующего блока 5, а выход - с входом S переключателя режимов 7 (R-S- триггера), элемента 8 задержки времени, выход которого соединен с одним из входов элемента ИЛ И 9 и с входом R переключателя 7, элемента И 10, один из входов которого соединен с выходом элемента ИЛИ 9, а выход - с одним из входов элемента И 11, второй вход которого соединен с выходом порогового элемента 4, а выход - с одним из входов источника 1, второй вход которого соединен с выходом переключателя 7 и с входом элемента НЕ 12, выход которого соединен с вторым входом элемента ИЛИ 9, вход элемента 8 и второй вход элемента 10
о
VIСП
о сл
сл
оединены с источником си гнал а управления y (не показан), выход элемента 10 соедиен с источником питания (не показан) якоря электродвигателя.
На фиг. 2 а - сигнал управления (напряжение на входах элементов 8 и 10); б -- напряжение на выходе элемента 8; в - напряжение на выходе элемента 10; г - изменение тока в цепи якоря электродвигателя; - изменение дифференциала тока в цепи якоря электродвигателя; е - изменение напряжения на выходе элемента 11; ж - изменение напряжения на выходе элемента 7; и - изменение напряжения на выходе источника 1 питания. Штриховыми линиями показаны графики изменения параметров при несостоявшемся растормаживании.
Устройство работает следующим образом.
При подаче сигнала управления Uy на выходах элементов задержки 8 времени, ИЛИ 9 и И 10 появляются логические 1. Логическая 1 с выхода элемента 8 устанавливает переключатель 7 режимов в исходное состоя ние, на его выходе устанавливается логическая 1, на выходе элемента НЕ 12 -логический О. Логическая 1 на выходе элемента 10 разрешает включение источника питания двигателя (не показаны) и на якорь электродвигателя подается напряжение питания. При исправном двигателе в цепи его якоря появляется ток (фиг. 2г) и по достижении им величины, определяемой порогом элемента 4, на выходе его устанавливается логическая 1, которая вызывает появление логической 1 также на выходе элемента И 11. Регулируемый источник 1 питания, имея на своих входах две логические 1, подает формированное напряжение (фиг, 2и) на катушку приводного электромагнита 2, в результате чего якорь электромагнита перемещается, двигатель растормаживается. Начало движения якоря двигателя сопровождается снижением тока в цепи якоря до величины, определяемой моментом сопротивления механизма. При снижении якорного тока на выходе дифференцирующего блока 5 появляется напряжение (фиг. 2д) и через определитель 6 полярности подается на вход S переключателя 7, и на его выходе появляется логический О. Под-действием этого сигнала источник 1 питания снижает напряжение на приводном электромагните до величины, достаточной для удержания якоря электромагнита во втянутом положении. На выходе элемента НЕ 12 в это время устанавливается логическая 1, которая подается на вход элемента ИЛИ 9 тем самым исключает дальнейшее изменение состояния на его выходе
в зависимости от состояния элемента 8 выдержки времени. Отключение электродвигателя и электромагнита происходит при снятии сигнала управления Uy. При несостоявшемся растормаживании (из-за неисправностей в тормозном устройстве, из-за обрыва цепи катушки электромагнита и т.д.) ток в цепи двигателя не станет уменьшаться, дифференциал тока будет равен О, на
выходе элемента 12 сохранится логический О и по прошествии времени, определяемому электромеханической постоянной механизма, на которое настроен элемент задержки, на входах и выходе элемента
9 установится логический О, в результате чего на выходах элементов 10 и 11 также устанавливаются логические О и с якоря электродвигателя ; и с катушки электромагнита снимаются напряжения питания. Электродвигатель затормаживается. Для приведения схемы в исходное состояние необходимо отключение источника сигнала управления Uy.
Применение предлагаемого устройства
позволяет повысить функциональную надежность управления электромагнитом за счет исключения возможности растормажи- вания двигателя с неисправной якорной цепью, исключения длительной стоянки
двигателя подтоком, поворачивания заторможенного вала и разрушения тормозных накладок после неудавшегося растормажи- взния.
Формула изобретени-я
Устройство для управления приводным электромагнитом, содержащее регулируемый источник питания, переключатель режимов, измеритель тока, дифференцирующий блок, блок определения полярности, вывод для подключения источника управляющего сигнала, два элемента И, элемент ИЛИ, элемент задержки, причем переключатель режимов подключен своим выходом
к входу управления регулируемого источника питания, обеспечивающего питание обмотки приводного электромагнита, выход измерителя тока соединен с входом дифференцирующего блока, выход которого подключей к входу блока определения полярности, вывод для подключения источника управляющего сигнала соединен с входом элемента задержки и одним из входов первого элемента И, отличающееся
5 тем, что, с целью повышения функциональной надежности, в него введены пороговый элемент, элемент НЕ, вывод для подключения блока управления двигателем привода, причем выход элемента задержки соединен с одним из входов переключателя режимов,
другой вход которого подключен, к выходу определителя полярности, и с одном из входов элемента ИЛИ, другой вход которого через элемент НЕ соединен с выходом переключателя режимов, выход элемента ИЛИ соединен с другим входом первого элемента и, выход первого элемента И соединен с одним из входов второго элемента
И, другой вход которого подключен к выходу порогового элемента и с выводом для подключения блока управления двигателем привода, выход второго элемента И подключен к второму входу регулируемого источника питания, вход порогового элемента соединен с выходом измерителя тока, включаемого в цепь якоря двигателя привода.
Упр. ддиго/ггелем
i-/y -1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводным электромагнитом | 1987 |
|
SU1432621A1 |
| Устройство для управления электромагнитом | 1990 |
|
SU1709402A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Устройство для защиты человека от поражения электрическим током в сети с электродвигателем | 1982 |
|
SU1089689A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Реверсивный электропривод постоянного тока | 1975 |
|
SU752714A1 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |
| Устройство для управления электромагнитным механизмом | 1986 |
|
SU1350674A1 |
Т.
Щт
Кякорю
двигателя
Фиг.1
| Крановое оборудование | |||
| Справочник под редакцией А.А.Рабиновича | |||
| М.: Энергия, 1979, с | |||
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления приводным электромагнитом | 1987 |
|
SU1432621A1 |
