Изобретение относится к преобразовательной технике и предназначено для использования в цифровых системах управления выпрямителями, в том числе в микропроцессорных системах.
Целью изобретения является упрощение цифровой реализации способа управления.
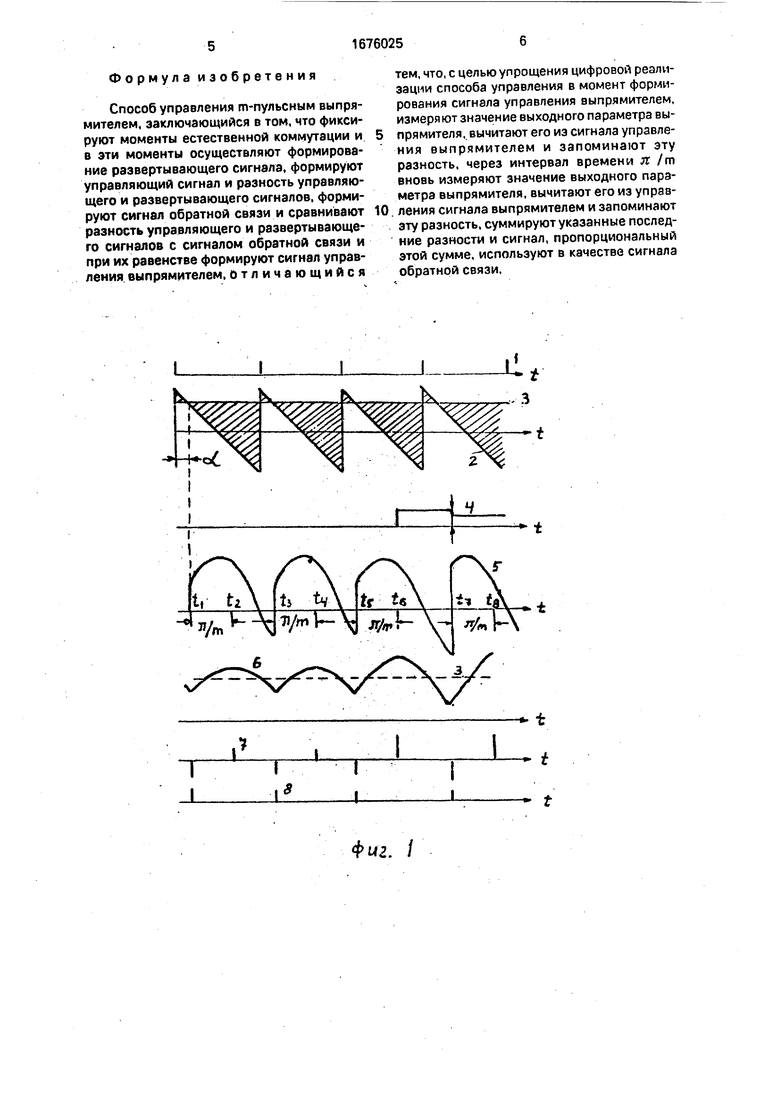
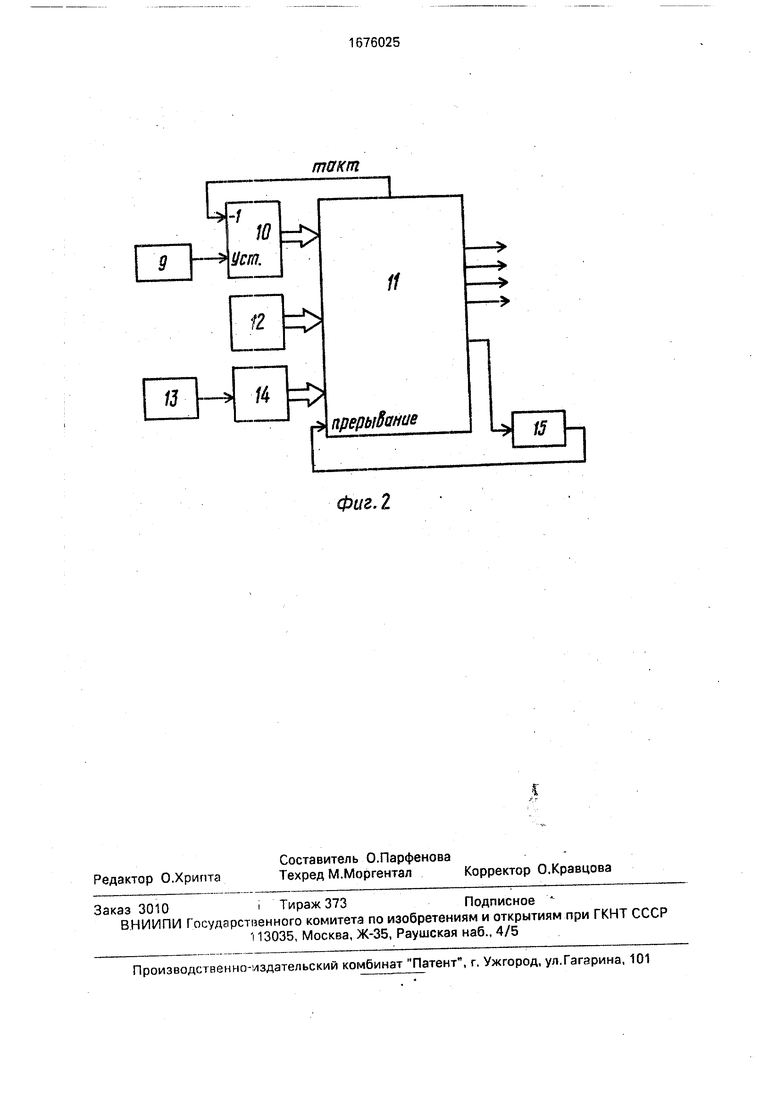
На фиг.1 представлена схема устройства для реализации способа; на фиг.2 - временные диаграммы.
Для определенности диаграммы построены для однофазного выпрямителя с RL-нагрузкой, в качестве выходного параметра используется ток нагрузки, т.е. речь идет о стабилизации выходного тока.
Позициями обозначены сихронизирую- щие импульсы 1, которые вырабатываются в моменты естественной коммутации вентилей, развертывающие сигналы 2 линейной формы (дискретизация цифровых кодов не показана), управляющий сигнал 3, сигнал 4 обратной связи, выходное напряжение выпрямителя 5, выходной ток выпрямителя 6, разность 7 выходного параметра и управляющего сигнала, управляющие импульсы 8 на силовые вентили. Узел 9 синхронизации связан со счетчиком 10, подключенным к входу микроЭВМ 11, к входу которой подключен также источник 12 управляющего Сигнала и датчик 13 тока через аналого-цифровой преобразователь 14. С выхода микроо ч о о ю ел
«™i
ЭВМ 11 снимают управляющие импульсы, запускающие также таймер 15, осуществляющий задержку на интервал я /т.
Способ управления т-пульсным выпрямителем.
В моменты естественной коммутации вентилей формируют начальное значение сигналя 2 развертки, для этого импульсы 1 с выхода узла 9 синхронизации подают на установочный вход счетчика 10, на выходе которого формируется код сигнала 2 развертки. Управляющий сигнал 3 на выходе источника 12 управляющего сигнала поступает на вход микроЭВМ 11, которая вычисляет текущие значения разности уп- равляющего и развертывающего сигналов. При нулевом сигнале обратной связи (t ts при равенстве управляющего 3 и развертывающего 2 сигналов вырабатываются управляющие импульсы на силовые вентили выпрямителя. Равенство разности сигналов 3 и 2 нулю также фиксирует микроЭВМ 11. Выходное напряжение выпрямителя при этом имеет форму 5, а выходной ток 6.
Рассмотрим формирование сигнала об- ратной связи.
В моменты выработки управляющих импульсов ti, ta, ts их измеряют и запоминают разность выходного параметра 6 и управляющего сигнала 3, эти разности представляют собой решетчатую функцию и представлены на диаграмме 7 (отрицательные импульсы). В указанные моменты времени опрос портов ввода и запоминание вычисленной разности производит микро- ЭВМ 11. Сигнал датчика 13 тока преобразуется в цифровую форму аналого-цифровым преобразователем 14, тогда же выравниваются масштабы сигналов 3 и 6. В указанные моменты времени командой с микроЭВМ происходит запуск таймера 15, который осуществляет задержку на интервал л /т. По истечении времени задержки таймер 15 подаст сигнал на прерывание работы микро- ЭВМ 11, которая перейдет к выполнению подпрограммы формирования сигнала обратной связи. Вновь будет введен сигнал 6 и вычислена разность сигналов 6 и 3. Указанные разности представляют собой решетчатую функцию и приведены на диаг- рамме 7 (положительные импульсы в моменты t2, t4, te и te). Сигнал обратной связи пропорционален сумме разностей в четные и нечетные моменты времени. Коэффициент пропорциональности определяет глубину обратной связи. Сигнал обратной связи вырабатывает микроЭВМ 11.
На интервале t ts устройство работает в согласованном режиме, и сигнал обратной
связи равняется нулю, так как сигнал 7 состоит из равновеликих положительных и отрицательных значений. В момент ts скачком уменьшилось сопротивление нагрузки, например, подключился новый потребитель. Начинается переходный процесс. В момент te разность 7 увеличивается, поэтому возрастает сигнал 4 обратной связи. Появление сигнала обратной связи вызывает изменение угла управления: микроЭВМ 11 вырабатывает управляющий импульс 8 при выполнении равенства разности сигналов 3 и 2(отштрихована на фиг. 1) сигналу 4 обратной связи. После завершения переходного процесса установится такое значение сигнала обратной связи, при котором среднее значение выходного тока выпрямителя будет стабилизировано на тот же уровень, что и в течение t ts.
Сигнал 4 обратной связи представляет собой рассогласование между средним з а межкоммутационный интервал значением выходного тока выпрямителя и управляющим сигналом. Последнее утверждение тем точнее, чем меньше в переменной составляющей сигнала 6 четных гармоний. Это условие выполняется достаточно точно при работе на RL-нагрузку, так как высшие гармоники, тока подавляются пропорционально росту их частоты. Еще точнее это условие выполняется для напряжения на выходе LC- фильтра, подавление гаромник на выходе пропорционально квадрату частоты. Таким образом, сигнал обратной связи дает информацию о величине среднего тока выпрямителя, т.е. полезной составляющей, причем для нахождения сигнала обратной связи достаточно интервала тг/т. В переходных режимах точность работы контура обратной связи уменьшается, однако это характерно и для известной схемы, и для вы- прямителей с П- и ПИ-регуляторами (ошибка по скорости). По динамическим показателям предлагаемый способ близок к известному (различаются значения фактора пульсаций).
Таким образом, предлагаемый способ управления позволяет в одном микропроцессорном устройстве совместить функции быстродействующей системы управления вертикального типа и регулятора, за счет этого упрощается аппаратурная реализация. Реализация замкнутого контура управления предлагаемым способом позволяет до минимума уменьшить время затрачиваемое микропроцессором на расчет сигнала обратной связи при сохранении высокой точности и высоких динамических показателей, присущих лучшим устройствам фазового управления замкнутого типа.
Формула изобретения
Способ управления m-пульсным выпрямителем, заключающийся в том, что фиксируют моменты естественной коммутации и в эти моменты осуществляют формирование развертывающего сигнала, формируют управляющий сигнал и разность управляющего и развертывающего сигналов, формируют сигнал обратной связи и сравнивают разность управляющего и развертывающего сигналов с сигналом обратной связи и при их равенстве формируют сигнал управления выпрямителем, отличающийся
тем. что, с целью упрощения цифровой реализации способа управления в момент формирования сигнала управления выпрямителем, измеряют значение выходного параметра выпрямителя, вычитают его из сигнала управления выпрямителем и запоминают эту разность, через интервал времени я /т вновь измеряют значение выходного параметра выпрямителя, вычитают его из управления сигнала выпрямителем и запоминают эту разность, суммируют указанные последние разности и сигнал, пропорциональный этой сумме, используют в качестве сигнала обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления последовательным резонансным инвертором напряжения с диодами встречного тока | 1989 |
|
SU1791941A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ПРИ ПОМОЩИ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ | 1996 |
|
RU2107982C1 |
| Способ управления полупроводниковым преобразователем постоянного напряжения | 1989 |
|
SU1742964A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2064730C1 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2571549C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ТВЕРДЫХ ТКАНЕЙ ЗУБОВ БИООБЪЕКТОВ | 2005 |
|
RU2330608C2 |
| Способ управления вентильным преобразователем | 1990 |
|
SU1737672A1 |
| Способ интегрального управления @ -фазным вентильным преобразователем | 1990 |
|
SU1737671A1 |
| Способ управления последовательным резонансным инвертором напряжения с диодами встречного тока | 1987 |
|
SU1508325A1 |
Изобретение относится к преобразовательной технике и предназначено для использования в цифровых системах управления выпрямителями, в том числе в микропроцессорных системах. Целью изобретения является упрощение цифровой реализации способа управления. В способе управления выпрямителем фиксируют моменты естественной коммутации и в эти моменты начинают формирование развертывающего сигнала, формируют управляющий сигнал и разность управляющего и развертывающего сигналов, формируют сигнал обратной связи, сравнивают разность управляющего и развертывающею сигналов с сигналом обратной связи и при их равенстве формируют управляющий импульс на силовой вентиль. Измеряют значения выходного параметра в момент выработки управляющего импульса, указанное значение вычитают из управляющего сигнала и запоминают. Запускают задержку на интервал лУм, по окончании которой вновь измеряют значение выходного параметра, вычитают его из управляющего сигнала и запоминают указанную разность, полученные разности суммируют, умножают на постоянный коэффициент и используют в качестве сигнала обратной связи. 2 ил. (Л С
фиг. I
такт
Фиг. 2
| Устройство для управления вентильнымпРЕОбРАзОВАТЕлЕМ | 1979 |
|
SU851733A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления вентильным преобразователем | 1975 |
|
SU537431A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
