J 31
т
15
рораспределителем 10, а другой, как и датчик 15 давления, подключен параллельно к участку гидромагистрали 16 между трехпо- зиционным дросселирующим гидрораспределителем 10 и гидроаккумулятором 12, датчик 17 скорости, установленный на тихоходном валу 18 зубчатой передачи 5, Штоки 21 двух подпружиненных гидроцилиндров 7 одностороннего действия, соединенные жестко посредством зубчатой рейки 22, через зубчатое колесо 23, приводные валы 24,25 и электромагнитную муфту 26 соединены со звездочкой 27 привода механизма подъема.Золотник трехпозиционного дросселирующего гидрораспределителя 10 жестко соединен с якорем 29 электромагнита 30. Корпус трехпозиционного дросселирующего гидрораспределителя 10 посредством подпружиненного толкателя 31, кулачка 32, валов 33 и зубчатой передачи 35 соединен со звездочкой 36 привода механизма подъема. Такое конструктивное решение позволяет совершать регулируемое торможение грузоподъемника 3, преобразовывать кинетическую энергию движущихся частей механизма подъема кра- на-штабелера в потенциальную энергию рабочей жидкости, накапливать эту энергию в гидроаккумуляторе 12 и использовать ее при пуске. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ приготовления пульпы для гидротранспорта и устройство для его осуществления | 1986 |
|
SU1411475A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Система аварийного запуска двигателя внутреннего сгорания | 2020 |
|
RU2725911C1 |
| Гидросистема для нагружения конструкций при прочностных испытаниях | 2016 |
|
RU2644443C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПЕРЕДАЧ | 1999 |
|
RU2153659C1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| Гидропривод машины для рытья траншей | 1979 |
|
SU878873A1 |
Изобретение относится к подъемно- транспортному оборудованию. Цель изобретения - снижение энергоемкости механизма подъема грузоподъемника крана-штабелера, который содержит электродвигатель 4, посредством зубчатой 5 и цепной 6 передач соединенный с грузоподъемником 3, два подпружиненных гидроцилиндра 7 одностороннего действия, гидравлически соединенных параллельно с одной стороны посредством обратных клапанов 8 с маслобаком 9, а с другой стороны посредством трехпозиционного дросселирующего гидрораспределителя 10 с маслобаком 9 и через обратный клапан 11 - с гидроаккумулятором 12, два двухпозиционных гидрораспределителя 13 и 14, один из которых гидравлически подключен параллельно на участке гидромагистрали между подпружиненными гидроцилиндрами 7 одностороннего действия и трехпозиционным дросселирующим гид
Изобретение относится к подъемно- ранспортному оборудованию, а именно к стройствам для складирования грузов.
Цель изобретения - снижение энергомкости.
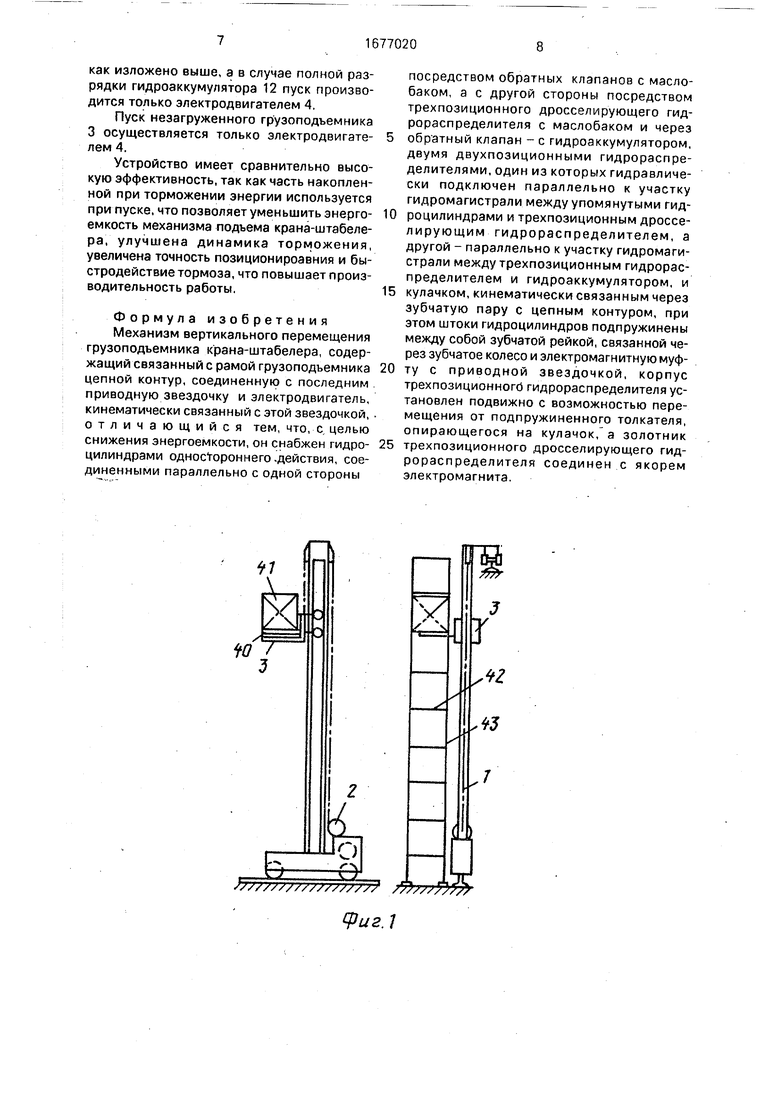
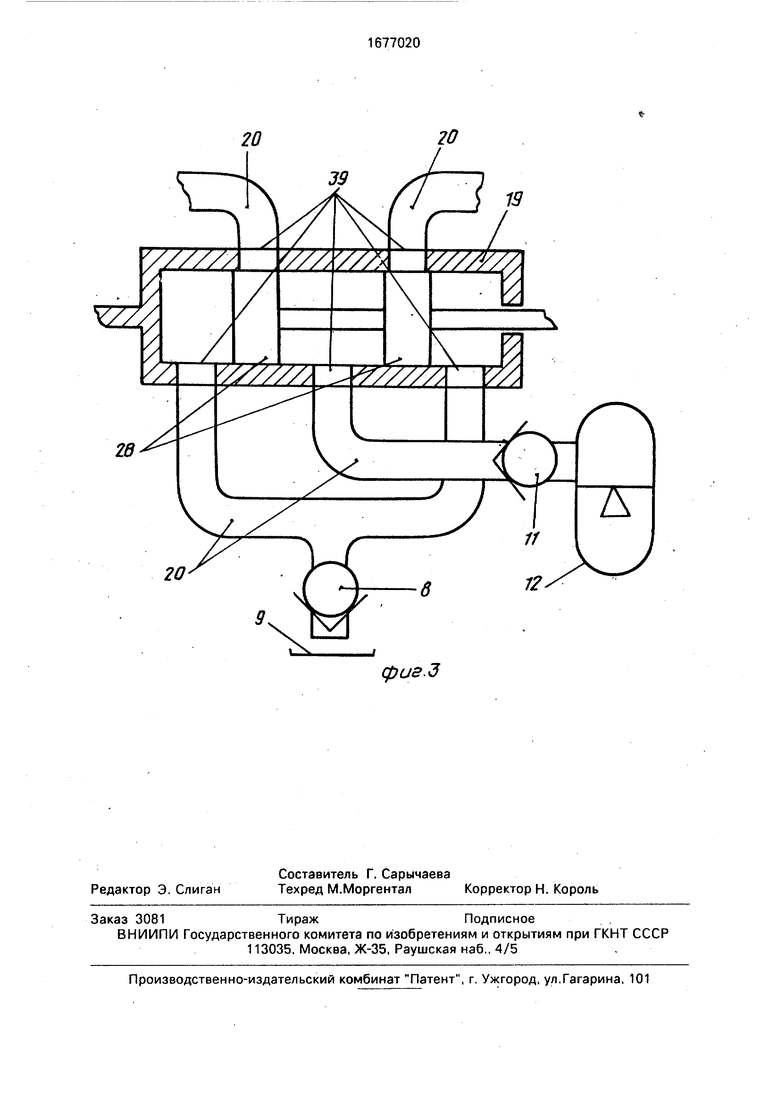
На фиг.1 изображен кран-штабелер, общий вид; на фиг.2 - кинематическая схема механизма подъема; на фиг.З - условная схема трехпозиционного дросселирующего гидрораспределителя.
Кран-штабелер содержит раму 1 с установленным на ней механизмом 2 подъема (вертикального перемещения), кинематически соединенным с грузоподъемником (платформой) 3. Механизм 2 подъема содержит электродвигатель 4, посредством зубчатой-5 и цепной 6 передач соединенный с грузоподъемником 3. Привод 2 механизма подъема снабжен двумя подпружиненными гидроцилиндрами 7 одностороннего действия, гидравлически соединенными параллельно с одной стороны посредством обратных клапанов 8 с маслобаком 9, а с другой стороны посредством трехпозиционного дросселирующего гидрораспределителя 10 с маслобаком 9 и через обратный клапан 11 - с гидроаккумулятором 12. Устройство содержит также два двухпозицион- ных гидрораспределителя 13 и 14, один из которых гидравлически подключен параллельно на участке гидромагистрали между подпружиненными гидроцилиндрами 7 одностороннего действия и трехпозицион- ным дросселирующим гидрораспределителем 10, а другой, как и датчик 15 давления, подключен параллельно к участку гидромагистрали 16 между трехпозиционным дросселирующим гидрораспределителем 10 и гидроаккумулятором 12. Датчиком 17 скорости установлен на тихоходном валу 18 зубчатой передачи 5,
Вследствие подвижности корпуса 19 трехпозиционного дросселирующего гидрорас пределителя 10 его входные гидролинии 20 выполнены в виде гибких рукавов высокого давления.
Штоки 21 двух подпружиненных гидроцилиндров 7 одностороннего действия, соединенные жестко посредством зубчатой рейки 22, через зубчатое колесо 23, приводные валы 24, 25 и электромагнитную муфту 26 соединены со звездочкой 27 привода 2 механизма подъема.
Золотник 28 трехпозиционного дросселирующего гидрораспределителя 10 жестко
соединен с якорем 29 электромагнита 30. Корпус 19 трехпозиционного дросселирующего гидрораспределителя 10 посредством подпружиненного толкателя 31, кулачка 32, валов 33, 34 и зубчатой передачи 35 соединен со звездочкой 36 привода механизма 2 подъема.
Поршни 37 поджаты пружинами 38. К выходным каналам 39 корпуса 19 трехпозиционного дросселирующего гидрораспределителя 10 подключены выходные гидролинии 20. С помощью вилочного захвата 40 груз 41 может устанавливаться в опорные поверхности 42 стеллажа 43.
Кран-штабелер работает следующим
-образом.
При пуске электродвигатель 4 вращает через зубчатую передачу 5 приводную звездочку 27, а она через цепную передачу 6 передает тяговое усилие на грузоподъемник 3. В случае, если грузоподъемник 3 загружен, то одновременно с пуском электродвигателя 4 подаются управляющие сигналы на электромагнитную муфту 26, соединяющую валы 24 и 25, двухпозиционный гидрораспределитель 14, который устанавливается в положение I, и
трехпозиционный дросселирующий гидрораспределитель 10, который при подъеме устанавливается в положение I, а при опускании - в положение II.
Давление жидкости из гидроаккумуля- тора 12 передается через двухпозиционный гидрораспределитель 14 и трехпозиционный дросселирующий гидрораспределитель 10 в правый гидроцилиндр 7 одностороннего действия при подъеме грузоподъемника 3 и в левый при опускании, перемещая при этом поршень 37, шток 21 и зубчатую рейку 22. Находящееся с ней в зацеплении зубчатое колесо 23 передает крутящий момент через электромагнитную муфту 26 и валы 24 и 25 на приводную звездочку 27.
После исчерпания энергии гидроаккумулятора 12 или выхода электродвигателя 4 на стационарный режим (по показаниям датчиков давления 15 искорости 17соответ- ственно) происходит снятие управляющих сигналов с электромагнитной муфты 26, электромагнита 30 и двухпозиционного гидрораспределителя 14. Трехпозиционный дросселирующий гидрораспределитель 10 и двухпозиционный гидрораспределитель 14 устанавливаются в положение III и II соответственно. Одновременно подается управляющий сигнал на двухпозиционный гидрораспределитель 13, который устанав- ливается в положение I. Поршни 37 поддей- ствием пружины 38 возвращаются в среднее положение.
Торможение грузоподъемника 3 при подходе его к точке позиционирования производится путем одновременного выключения электродвигателя 4, снятия управляющего сигнала с двухпозиционного гидрораспределителя 13, возвращающегося в положение I, и подачи управляющих сигналов на электромагнитную муфту 26, соединяющую валы 24 и 25, и электромагнит 30. Трехпозиционный дросселирующий гидрораспределитель 10 при опускании грузоподъемника 3 устанавливается в по- ложение I, а при подъеме - в положение II. Начинающий перемещаться при этом поршень 37 вытесняет рабочую жидкость из одного гидроцилиндра 7 одностороннего действия через трехпозиционный дроссе- лирующий гидрораспределитель 10 и обратный клапан 11 в гидроаккумулятор 12, а полость другого гидроцилиндра 7 одностороннего действия наполняется рабочей жидкостью из маслобака 9 через обратный клапан 8. Причем степень дросселирования рабочей жидкости в трехпозиционном дросселирующем гидрораспределителе 10 зависит от величины частичного перекрытия выходных каналов 39 золотником 28. Эта
величина регулируется перемещением корпуса 19 трехпозиционного дросселирующего гидрораспределителя 10 в зависимости от высоты подъема грузоподъемника 3 и обусловлена кинематической связью между ними. Подбором передаточного отношения зубчатой передачи 35 и профиля кулачка 32 можно обеспечить максимальное перекрытие выходных каналов 39 при верхнем положении грузоподъемника 3 и минимальное - при нижнем.
После остановки грузоподъемника 3 в точке позиционирования и выдвижения вилочного захвата 40 с грузом 41 происходит подача управляющего сигнала на двухпозиционный гидрораспределитель 13, который устанавливается в положение I, и снятие управляющих сигналов с электромагнитной муфты 26 и электромагнита 30. Трехпозиционный дросселирующй гидрораспределитель 10 возвращается в положение III. При этом поршни 37 под действием пружин 38 возвращаются в среднее положение, а грузоподъемник 3 под действием сил тяжести смещается вниз до посадки груза 41 на опорные поверхности 42 стеллажа 43. После разгрузки грузоподъемника 3 происходит подача управляющего сигнала на электромагнитную муфту 26, соединяющую валы 24 и 25, и снятие его с двухпозиционного гидрораспределителя 13, который возвращается в положение II.
При приподнятии груза 41 используется только энергия, рекуперированная в процессе торможения, т.е. давление жидкости из гидроаккумулятора 12 передается через двухпозиционный гидрораспределитель 14 и трехпозиционный дросселирующий гидрораспределитель 10 в правый (фиг.2) гидроцилиндр 7 одностороннего действия, перемещая при этом поршень 37, шток 21 и зубчатую рейку 22. Находящееся с ней в зацеплении зубчатое колесо 23 передает крутящий момент через электромагнитную- муфту 26 и валы 24 и 25 на приводную звездочку 27, а она через цепную передачу 6 передает тяговое усилие на грузоподъемник 3, который перемещается вверх.
После того как груз 41 приподнят с опорных поверхностей 42 стеллажа 43, что определяется по показаниям датчика 17 скорости, происходит снятие управляющего сигнала с электромагнита 30, и трехпозиционный дросселирующий гидрораспределитель 10 устанавливается в положение II. Вилочный захват 40 задвигается в транспортное положение.
В случае, если i идроаккумуг.ятор 12 разрядился не полностью (по показаниям датчика 15 давления) пуск производится так,
как изложено выше, а в случае полной разрядки гидроаккумулятора 12 пуск производится только электродвигателем 4.
Пуск незагруженного грузоподъемника 3 осуществляется только электродвигате- лем 4.
Устройство имеет сравнительно высокую эффективность, так как часть накопленной при торможении энергии используется при пуске, что позволяет уменьшить энерго- емкость механизма подъема крана-штабеле- ра, улучшена динамика торможения, увеличена точность позиционироавния и быстродействие тормоза, что повышает производительность работы.
Формула изобретения Механизм вертикального перемещения грузоподъемника крана-штабелера, содержащий связанный с рамой грузоподъемника цепной контур, соединенную с последним приводную звездочку и электродвигатель, кинематически связанный с этой звездочкой, отличающийся тем, что, с целью снижения энергоемкости, он снабжен гидро- цилиндрами одностороннего .действия, соединенными параллельно с одной стороны
посредством обратных клапанов с маслобаком, а с другой стороны посредством трехпозиционного дросселирующего гидрораспределителя с маслобаком и через обратный клапан - с гидроаккумулятором, двумя двухпозиционными гидрорэспре- делителями, один из которых гидравлически подключен параллельно к участку гидромагистрали между упомянутыми гидроцилиндрами и трехпозиционным дроссе- лирующим гидрораспределителем, а другой - параллельно к участку гидромагистрали между трехпозиционным гидрораспределителем и гидроаккумулятором, и кулачком, кинематически связанным через зубчатую пару с цепным контуром, при этом штоки гидроцилиндров подпружинены между собой зубчатой рейкой, связанной через зубчатое колесо и электромагнитную муфту с приводной звездочкой, корпус трехпозиционногб гидрораспределителя установлен подвижно с возможностью перемещения от подпружиненного толкателя, опирающегося на кулачок, а золотник трехпозиционного дросселирующего гидрораспределителя соединен с якорем электромагнита.
///////////
фиг.1
2В
20
фиг.З
| Зерцалов А.И., Певзнер Б.И | |||
| Краны-шта- белеры | |||
| М., Машиностроение, 1974, с.60 |
