Изобретение относится к машиностроению и может найти применение в механизмах, обеспечивающих жесткую фиксацию поворотного элемента.
Целью изобретения является повышение надежности за счет жесткой фиксации храповика при прямом ходе собачки.
На чертеже изображен храповой механизм. Он содержит храповик 1 с зубьями, выполненными в виде цевок, подпружиненную собачку 2, смонтированную с возможностью поворота на оси 3 и линейного перемещения в прямом и обратном направлениях, а также подпружиненный упор 4.
Цевки выполнены с цилиндрической 5 и торцевой 6 поверхностями, расположенными соответственно параллельно и перпендикулярно оси храповика 1.
Собачка 2 выполнена с профильной 7 и периферийной 8 поверхностями и с упорной стенкой 9. Профильная 7 и периферийная 8 поверхности собачки 2 расположены с возможностью взаимодействия соответственно с торцевой 6 и цилиндрической 5 поверхностями цевок. Упорная стенка 9 расположена параллельно направлению линейного перемещения собачки и с возможностью взаимодействия с цилиндрической поверхностью 5 цевки. Расстояние от оси храповика 1 до упорной стенки 9 меньше радиуса описанной по периферийной части цилиндрических поверхностей 5 цевок окружности. Ось поворота собачки 2 установлена перпендикулярно оси храповика 1.
( XJ sj Ы XJ О
Пружины 10 и 11 установлены с возможностью взаимодействия соответственно с собачкой 2 и упором 4.
Храповой механизм работает следующим образом.
Собачка 2 совершает обратный ход для входа в зацепление с очередной цевкой, которая зафиксирована упорной стенкой 9. Упор 4 удерживает храповик от обратного поворота, Собэчка 2, приподнятая скосом профильной поверхности 7, проходит над цевкой и входит в зацепление своей периферийной поверхностью 8 с цилиндрической поверхностью 5 цевки. При рабочем ходе собачка 2 поворачивает храповик 1 до подхода следующей цевки к упорной стенке. При этом цилиндрическая поверхность 5 цевки контактирует с упорной стенкой 9, расстояние до которой меньше радиуса описанной по периферии цилиндрических поверхностей цевок окружности, что обеспечивает жесткую фиксацию храповика при прямом перемещении собачки. В конце рабочего хода упор 4 фиксирует храповик от поворота в обратном направлении.
Храповой механизм позволяет жестко фиксировать храповик от инерционного поворота как в прямом, так и в обратном направлении.
Форму л а изобретения
Храповой механизм, содержащий храповики с зубьями, расположенными концентрично его оси, подпружиненную собачку, расположенную с возможностью взаимодействия с зубьями храповика и смонтированную с возможностью поворота на оси и линейного перемещения в прямом и обратном направлениях, подпружиненный упор для обеспечения жесткого упора храповика при обратном ходе собачки, о т- л и чающийся тем, что, с целью повышения надежности за счет жесткой фиксации храповика при прямом ходе собачки, зубья храповика выполнены в виде цевок с цилиндрической и торцевой поверхностями, расположенными соответственно, параллельно и перпендикулярно оси храповика, собачка выполнена с профильной и периферийной поверхностями и с упорной стенкой, при этом профильная и периферийная поверхности собачки расположены с возможностью взаимодействия соответственно с торцевой поверхностью цевки и с цилиндрической поверхностью смежной цевки, упорная стенка расположена параллельно направлению линейного перемещения собачки и с возможностью взаимодействия с цилиндрической поверхностью цевки на расстоянии от оси храповика, меньшем радиуса описанной по периферии цилиндрических поверхностей цевок окружности, а ось поворота собачки установлена перпендикулярно оси храповика.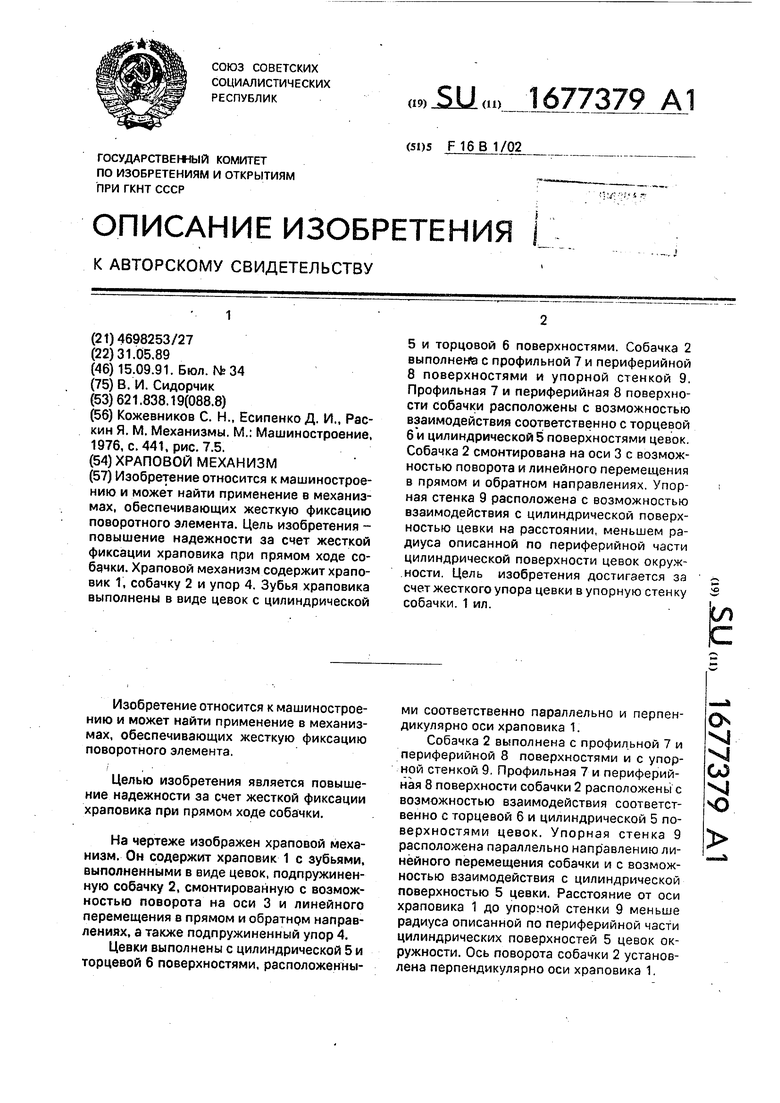

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2204490C1 |
| Механизм смены рисунка по утку к бесчелночному ткацкому станку | 1979 |
|
SU878823A1 |
| Тормозная втулка велосипеда | 1989 |
|
SU1689199A1 |
| ШТАНГОВРАЩАТЕЛЬ КОЛОННЫ НАСОСНЫХ ШТАНГ ГЛУБИННОНАСОСНОЙ УСТАНОВКИ | 1998 |
|
RU2155859C2 |
| Передаточный механизм | 2020 |
|
RU2725923C1 |
| Револьверная головка | 1980 |
|
SU908544A1 |
| Револьверная головка | 1974 |
|
SU531661A1 |
| ШИБЕРНЫЙ МЕХАНИЗМ РАЗГРУЗКИ ВАГОНА-ХОППЕРА | 2015 |
|
RU2600179C1 |
| Ручной ткацкий станок для изготовления косынок | 1948 |
|
SU78801A1 |
Изобретение относится к машиностроению и может найти применение в механизмах, обеспечивающих жесткую фиксацию поворотного элемента. Цель изобретения - повышение надежности за счет жесткой фиксации храповика при прямом ходе собачки. Храповой механизм содержит храповик 1, собачку 2 и упор 4. Зубья храповика выполнены в виде цевок с цилиндрической 5и торцовой 6 поверхностями. Собачка 2 выполнен с профильной 7 и периферийной 8 поверхностями и упорной стенкой 9. Профильная 7 и периферийная 8 поверхности собачки расположены с возможностью взаимодействия соответственно с торцевой 6и цилиндрической 5 поверхностями цевок. Собачка 2 смонтирована на оси 3 с возможностью поворота и линейного перемещения в прямом и обратном направлениях. Упорная стенка 9 расположена с возможностью взаимодействия с цилиндрической поверхностью цевки на расстоянии, меньшем радиуса описанной по периферийной части цилиндрической поверхности цевок окружности. Цель изобретения достигается за счет жесткого упора цевки в упорную стенку собачки. 1 ил.
| Кожевников С | |||
| Н., Есипенко Д | |||
| И., Рас- кин Я, М, Механизмы | |||
| М.: Машиностроение, 1976, с | |||
| Кинематографический аппарат | 1918 |
|
SU441A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
