со С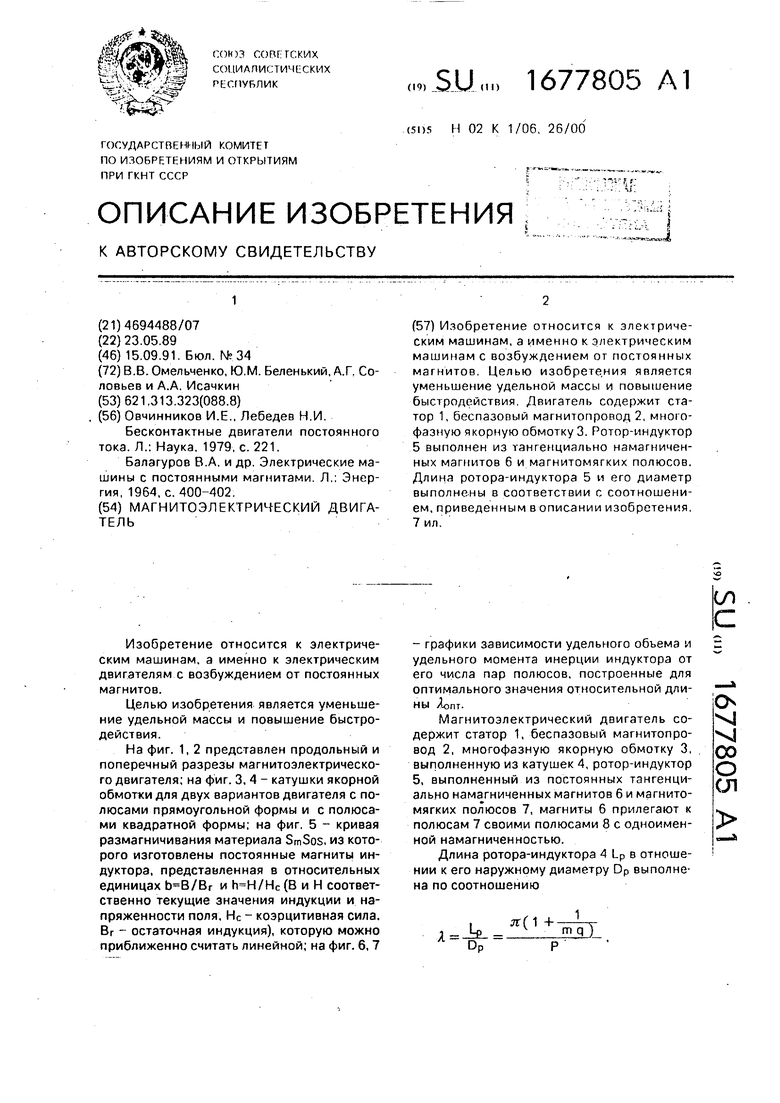

Изобретение относится к электрическим машинам, а именно к электрическим машинам с возбуждением от постоянных магнитов. Целью изобретения является уменьшение удельной массы и повышение быстродействия Двигатель содержит статор 1, беспазовый магнитопровод 2, многофазную якорную обмотку 3. Ротор-индуктор 5 выполнен из тангенциально намагниченных магнитов 6 и магнитомягких полюсов. Длина ротора-индуктора 5 и его диаметр выполнены в соответствии с соотношением, приведенным в описании изобретения. 7 ил.
Изобретение относится к электрическим машинам, а именно к электрическим двигателям с возбуждением от постоянных магнитов.
Целью изобретения является уменьшение удельной массы и повышение быстродействия.
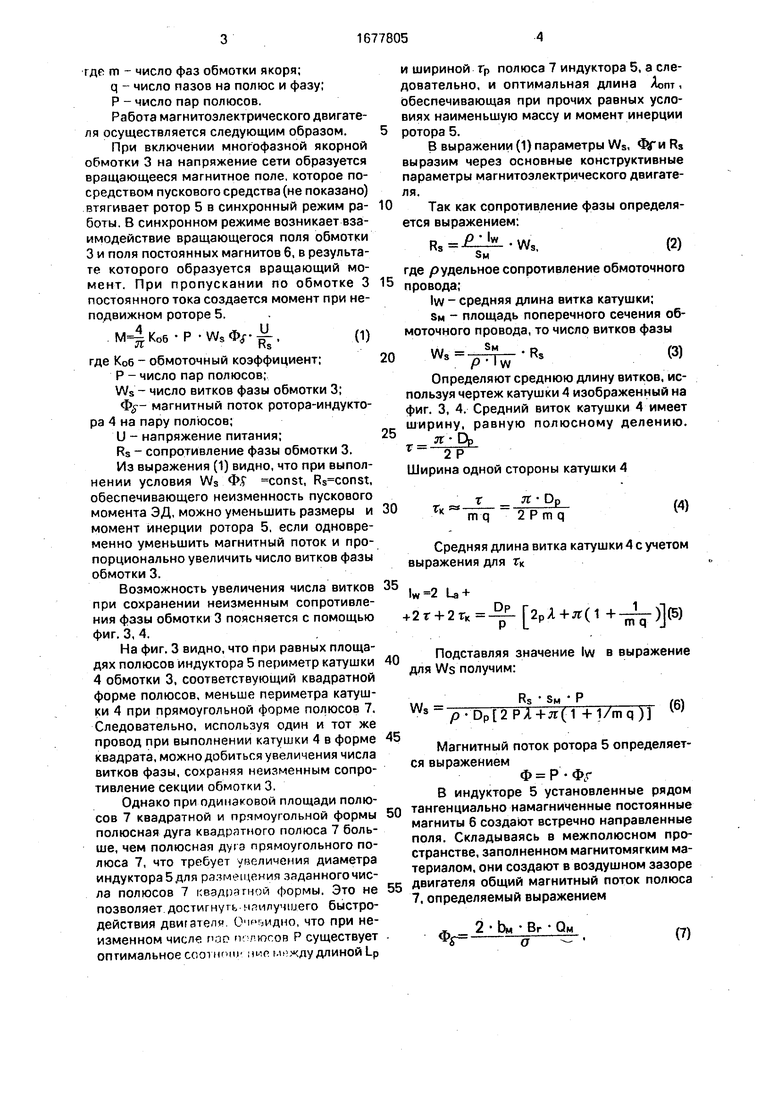
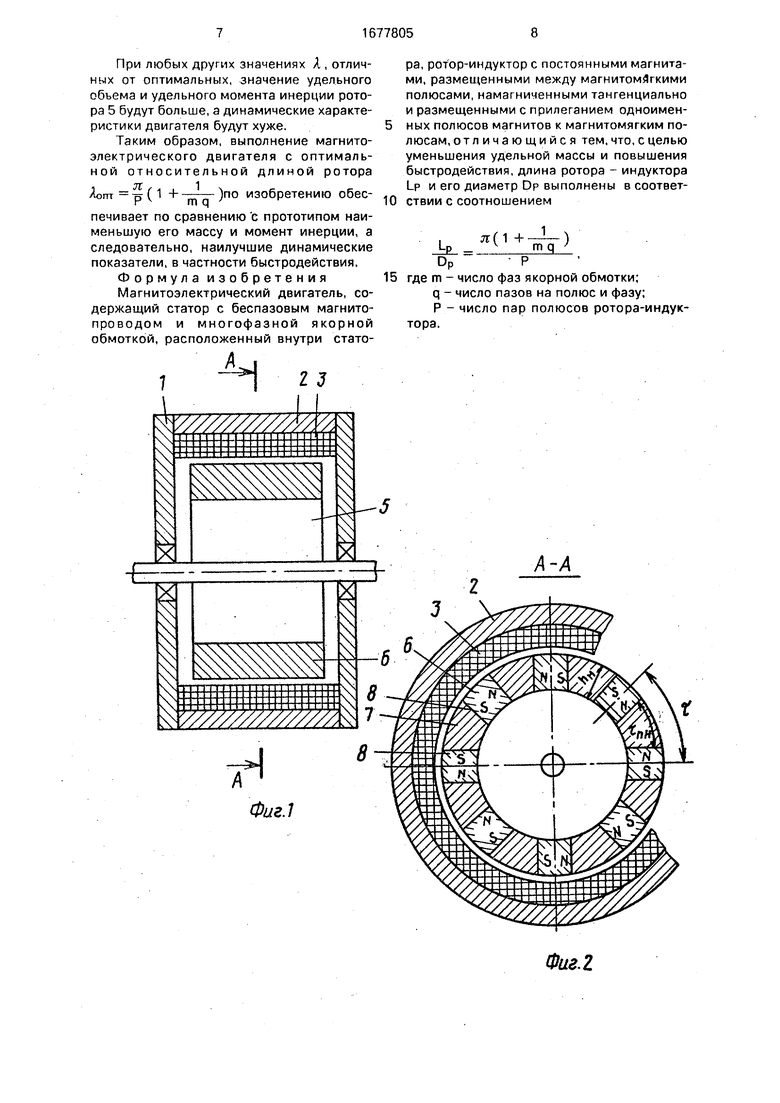
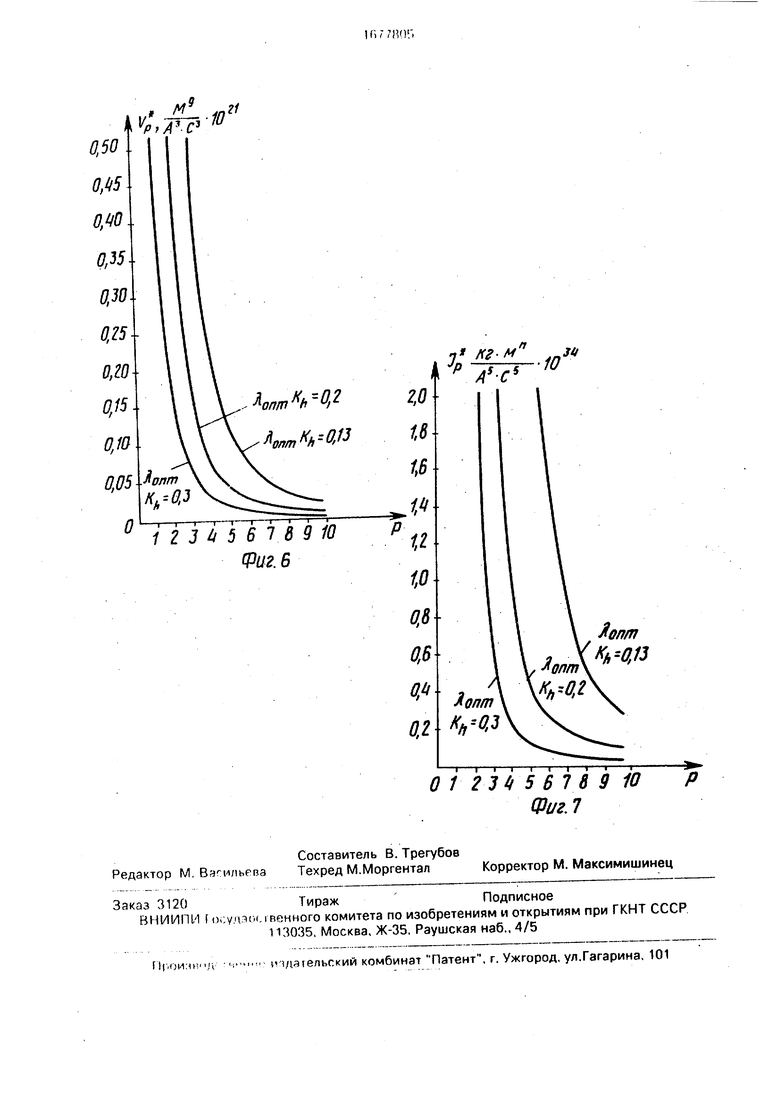
На фиг. 1, 2 представлен продольный и поперечный разрезы магнитоэлектрического двигателя; на фиг. 3, 4 - катушки якорной обмотки для двух вариантов двигателя с полюсами прямоугольной формы и с полюсами квадратной формы; на фиг. 5 - кривая размагничивания материала SmSos, из которого изготовлены постоянные магниты индуктора, представленная в относительных единицах и (В и Н соответственно текущие значения индукции и напряженности поля, Нс - коэрцитивная сила. Вг - остаточная индукция), которую можно приближенно считать линейной; на фиг. 6, 7
- графики зависимости удельного объема и удельного момента инерции индуктора от его числа пар полюсов, построенные для оптимального значения относительной длины Аопт.
Магнитоэлектрический двигатель содержит статор 1, беспазовый магнитопро- вод 2, многофазную якорную обмотку 3, выполненную из катушек 4, ротор-индуктор 5, выполненный из постоянных тангенциально намагниченных магнитов 6 и магнитомягких полюсов 7, магниты 6 прилегают к полюсам 7 своими полюсами 8 с одноименной намагниченностью.
Длина ротора-индуктора 4 Lp в отношении к его наружному диаметру Dp выполнена по соотношению
о
XI XI
со
о
СЛ
Члт(1 +ГДР m - число фаз обмотки якоря;
q - число пазов на полюс и фазу;
Р - число пар полюсов.
Работа магнитоэлектрического двигателя осуществляется следующим образом.
При включении многофазной якорной обмотки 3 на напряжение сети образуется вращающееся магнитное поле, которое посредством пускового средства (не показано) втягивает ротор 5 в синхронный режим работы. В синхронном режиме возникает взаимодействие вращающегося поля обмотки 3 и поля постоянных магнитов 6, в результате которого образуется вращающий момент. При пропускании по обмотке 3 постоянного тока создается момент при неподвижном роторе 5.
М Коб
Р -WslV-ir. Ks
где Коб - обмоточный коэффициент;
Р - число пар полюсов;
Ws - число витков фазы обмотки 3;
Ф магнитный поток ротора-индуктора 4 на пару полюсов;
U - напряжение питания;
Rs сопротивление фазы обмотки 3.
Из выражения (1) видно, что при выполнении условия Ws Ф.Г const, Rs const, обеспечивающего неизменность пускового момента ЭД, можно уменьшить размеры и момент инерции ротора 5, если одновременно уменьшить магнитный поток и пропорционально увеличить число витков фазы обмотки 3.
Возможность увеличения числа витков при сохранении неизменным сопротивления фазы обмотки 3 поясняется с помощью фиг. 3, 4.
На фиг. 3 видно, что при равных площадях полюсов индуктора 5 периметр катушки 4 обмотки 3, соответствующий квадратной форме полюсов, меньше периметра катушки 4 при прямоугольной форме полюсов 7. Следовательно, используя один и тот же провод при выполнении катушки 4 в форме квадрата, можно добиться увеличения числа витков фазы, сохраняя неизменным сопротивление секции обмотки 3,
Однако при одинаковой площади полюсов 7 квадратной и прямоугольной формы полюсная дуга квадратного полюса 7 больше, чем полюсная прямоугольного полюса 7, что требует увеличения диаметра индуктора 5 для размещения заданного числа полюсов 7 квадратной формы. Это не позволяет достигнуть наилучшего быстродействия двигателя Оксидно, что при неизменном числе пас п- югов Р существует оптимальное сося нот- НИР длиной
10
15
20
25
и шириной Гр полюса 7 индуктора 5, а следовательно, и оптимальная длина Аопт, обеспечивающая при прочих равных условиях наименьшую массу и момент инерции ротора 5.
В выражении (1) параметры Ws, Фг и Rs выразим через основные конструктивные параметры магнитоэлектрического двигателя.
Так как сопротивление фазы определяется выражением:
,(2)
где /эудельное сопротивление обмоточного провода;
Iw - средняя длина витка катушки;
SM - площадь поперечного сечения обмоточного провода, то число витков фазы
SM
(3)
/o-Tvv
Определяют среднюю длину витков, используя чертеж катушки 4 изображенный на фиг. 3, 4. Средний виток катушки 4 имеет ширину, равную полюсному делению.
к- Dp
Т 2Р
Ширина одной стороны катушки 4
Тк
т л Рр m q 2 Р m q
(4)
Средняя длина витка катушки 4 с учетом выражения для гк
35
U + + 2т + 2тк 2рА+я(1+1)(5)
4Q Подставляя значение Iw в выражение для Ws получим:
Ws
Rs SM Р
/ -Ор 2РА+л:(1 +1/mq)
(6)
Магнитный поток ротора 5 определяется выражением
ф р фгВ индукторе 5 установленные рядом тангенциально намагниченные постоянные магниты 6 создают встречно направленные поля. Складываясь в межполюсном пространстве, заполненном магнитомягким материалом, они создают в воздушном зазоре двигателя общий магнитный поток полюса 7, определяемый выражением
Ьм Вг Ом
а
(7)
5 1677805б
где Ьм - относительная индукция в нейт-Подставляя значения Ws и Ф соответ- ральном сечении магнита 6, U -ственно из формул (6) и (7) с учетом (8) в площадь поперечного сечения постоянныхвыражение (1) для пускового момента маг- магнитов 6.нитоэлектрической машины, после преоб- hM - высота постоянного магнита 65 разований получим выражение для вдоль радиуса индуктора 5,определения диаметра ротора 5 двигателя:
а- коэффициент рассеяния магнитного
потока индуктора 5.Dp
Пренебрегая насыщением магнитнойж р и МпГор; 4цепи индукцию в нейтральном сечении маг-10 8 К б Кн s В Р2 U I
нита (координаты точки пересечения кривой2I 1Гл
размагничивания и луча, соответствующего х ( 1 4--) Г1 4- - h r 1
относительной проводимости воздушногоmcl L л3«п(1-«п)Нс-1
зазора на фиг. 5), можно найти путем реше-(9)
кия системы уравнений15 Так как объем цилиндрического сплошного ротора 5 магнитоэлектрического двига(Ь 1 - h ;теля и его момент инерции определяются
Ь h - Лг соответственно выражениями: д
описывающих соответственно кривую раз- 0 Vp - А Dp , (10)
магничивания и луч проводимости воздуш-
ного зазора. Решая эту систему уравнений,$
получают, 2 V2/A2 , (11)
цп
д.25
Ьм s- т где плотность материала ротора 5, то с
1 + Af 2 Р д Кн Вг 10учетом выражения(Э) будем иметь
Л3 On (1 -On) Не„ / Мп 3 w
о
35
- проводимость воздушного зазора двига-г РА+яГ 1 + VI
теля на пару полюсов; L m Q J
д Br.QM Br-hM Lp nooBQг 2Р2.КЬ.Вг-107-|1з -УДель -нГЧ -нГи -Па°- 1+ onCi-oo) Л
димость постоянного магнита;40
Q$ On г Lp - площадь полюса в на-ный Объем ротора 5, зависящий от конструкправлении, перпендикулярном радиусу ро-тивных особенностей индуктора и свойств
т°Ра материала постоянных магнитов б,
On Тпн/ - коэффициент полюсной ду-
ги; 45|J 1174.8 Vp3 V(v;/A) -удельный
Гпн - наибольшая ширина полюсамомент инерции ротора для у 8000кг/м3
(фиг. 2);(13) ,
д- длина воздушного зазора двигателяПутем исследования функции Vp f(P, A)
вдоль его радиуса;и (P. AJ на минимум получим оптимальLM- т- г и (1 - Оп) - длина ное значение относительно длины ротора 5
магнита по оси намагничивания;, 1 ч
- дt п + )
д - -рг- коэффициент длины воздуш- Jg-
М5Dp r
ного зазора;55
коэффициент высоты магнитаобеспечивающее минимальный объем и MO- DPмент инерции ротора при прочих равных (фиг. 2).условиях, а следовательно и максимальное
быстродействие.
35
При любых других значениях Я , отличных от оптимальных, значение удельного объема и удельного момента инерции ротора 5 будут больше, а динамические характеристики двигателя будут хуже.
Таким образом, выполнение магнитоэлектрического двигателя с оптимальной относительной длиной ротора
я
1
Aorrr--р(1 +)по изобретению обеспечивает по сравнению с прототипом наименьшую его массу и момент инерции, а следовательно, наилучшие динамические показатели, в частности быстродействия. Формула изобретения Магнитоэлектрический двигатель, содержащий статор с беспазовым магнито- проводом и многофазной якорной обмоткой, расположенный внутри статоФиг.1
ра, ротор-индуктор с постоянными магнитами, размещенными между магнитомЯгкими полюсами, намагниченными тангенциально и размещенными с прилеганием одноименных полюсов магнитов к магнитомягким полюсам, отличающийся тем, что, с целью уменьшения удельной массы и повышения быстродействия, длина ротора - индуктора Lp и его диаметр Dp выполнены в соответствии с соотношением
5
1
Я(1 + -1-)
vm n
m q
где m - число фаз якорной обмотки;
q - число пазов на полюс и фазу;
Р - число пар полюсов ротора-индуктора.
Фиг.1
01/3.3
Фиг А
фиг. 5
„ 1.//7г/ VP, 1U
123456189 10
Фиг. 6
п кг-м 4Пзи
Jn -10
./
2,0 1,6
V
I
1,г
w
0,8
о,в
w
0,2
| Овчинников И.Е., Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока | |||
| Л.: Наука | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| Балагуров В.А | |||
| и др | |||
| Электрические машины с постоянными магнитами | |||
| Л.: Энергия, 1964, с | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
