У
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора автоматизированных систем управления | 1982 |
|
SU1132302A1 |
| Тренажер водителя землеройной машины | 1981 |
|
SU982066A1 |
| Тренажер-имитатор бурового станка | 2019 |
|
RU2725451C1 |
| Медицинский тренажер | 1991 |
|
SU1820406A1 |
| Устройство для обучения трактористов | 1980 |
|
SU1040508A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| ИНТЕРАКТИВНЫЙ ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ ПОМОЩИ ЧЕЛОВЕКУ ПРИ ЗАКУПОРКЕ ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ | 2013 |
|
RU2550665C2 |
| Тренажер оператора магистральных трубопроводов | 1984 |
|
SU1262557A1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
Изобретение относится к обучающим устройствам, в частности к тренажерам, и может быть использовано для формирования навыков работы домкратом. Цель изобретения - повышение безопасности, а также расширение дидактических возможностей. Тренажер содержит имитатор груза 1. домкрат 18, датчик 2 переноса имитатора груза, блок отображения информации 3, плунжерные гидроцилиндры 4, 5, шарнирно соединенные с имитатором груза, основание 6. Гидросистема управления каждого гидроцилиндра содержит обратный клапан 9, управляемый сливной золотник, регулируемый дроссель, реле давления, бак. Управление сливным золотником и регулируемым дросселем осуществляется от блока управления 14. Верхняя поверхность основания 6 выполнена рельефной. Тренажер содержит приспособления 20 для выравнивания вертикального положения домкрата (набор металлических пластин). Домкрат 19 устанавливают на основании 6, выравнивают его вертикальное положение и поднимают имитатор груза, отслеживая по блоку отображения информации 3 горизонтальность положения имитатора, Изменение величины нагрузки осуществляют, регулируя проходное сечение дросселя. 1 з.п. ф-лы, 5 ил. Чв Ё
17
20
Изобретение относится к обучающим устройствам, в частности к тренажерам, и может быть использовано для формирования навыков работы домкратом,
Цель изобретения - повышение безопасности, а также расширение дидактических возможностей.
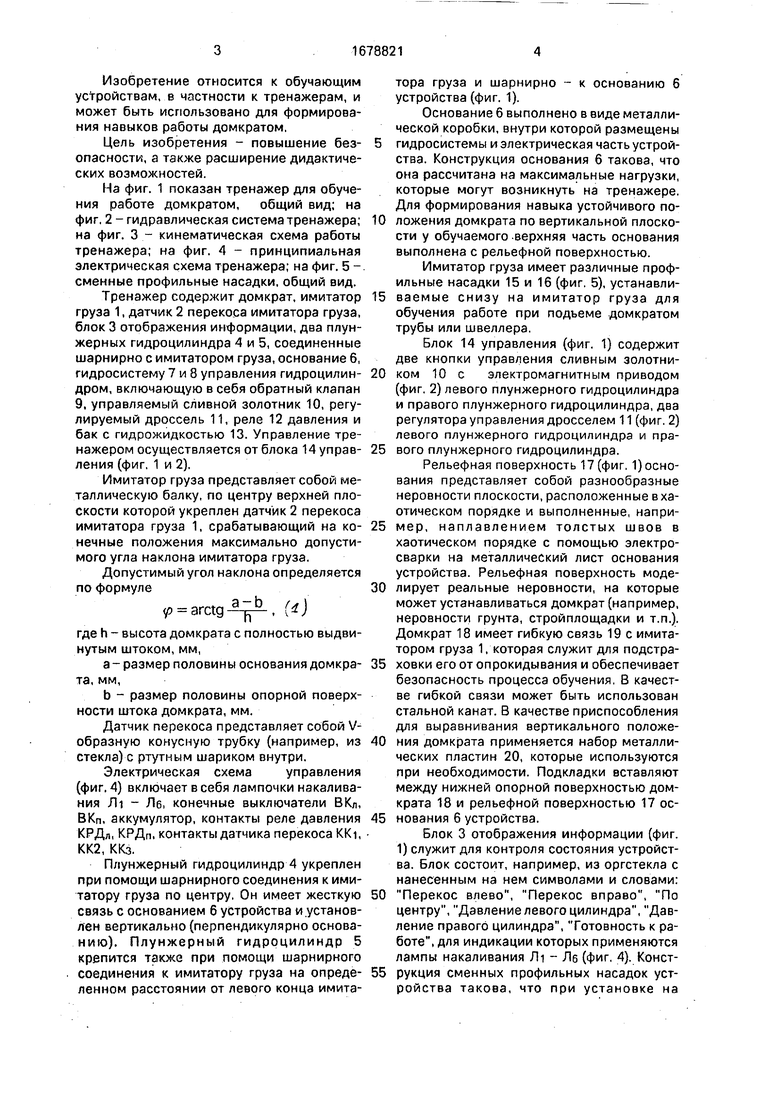
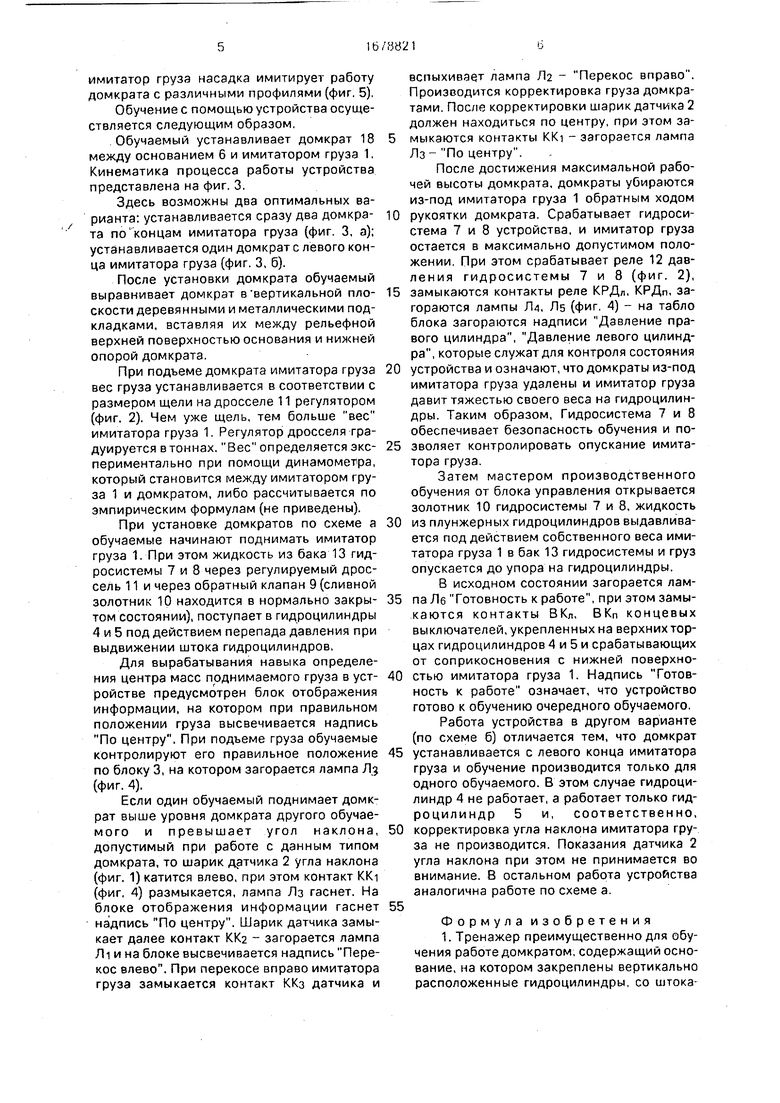
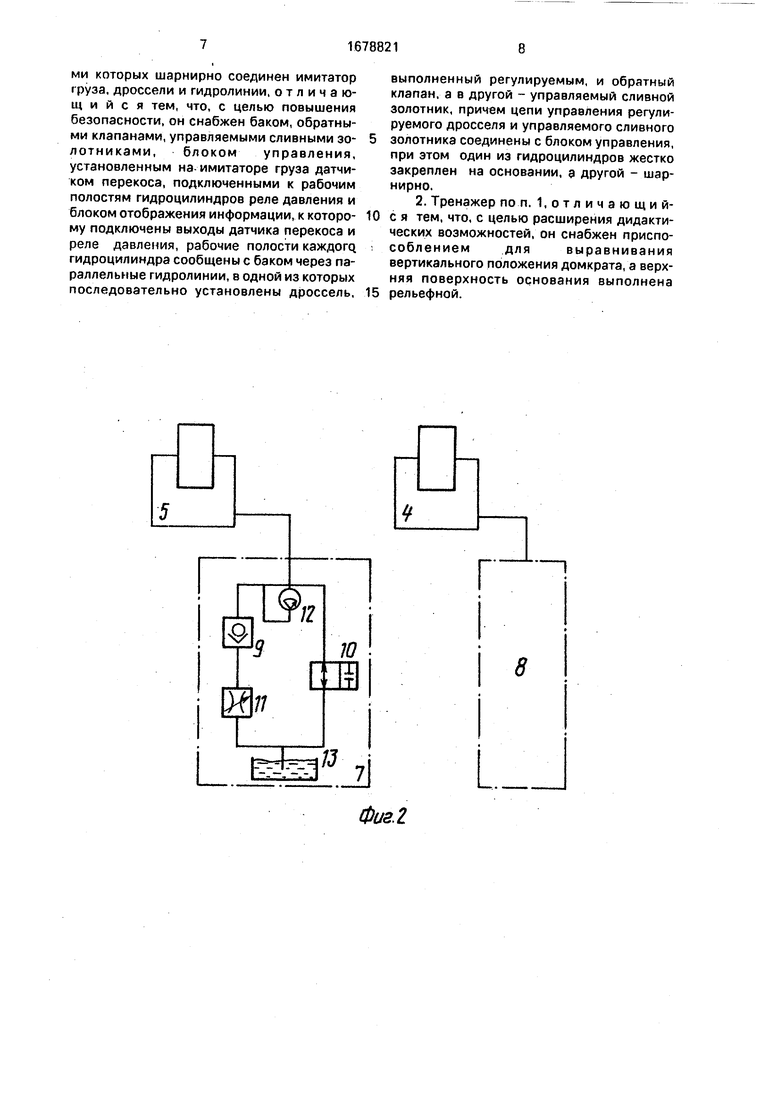
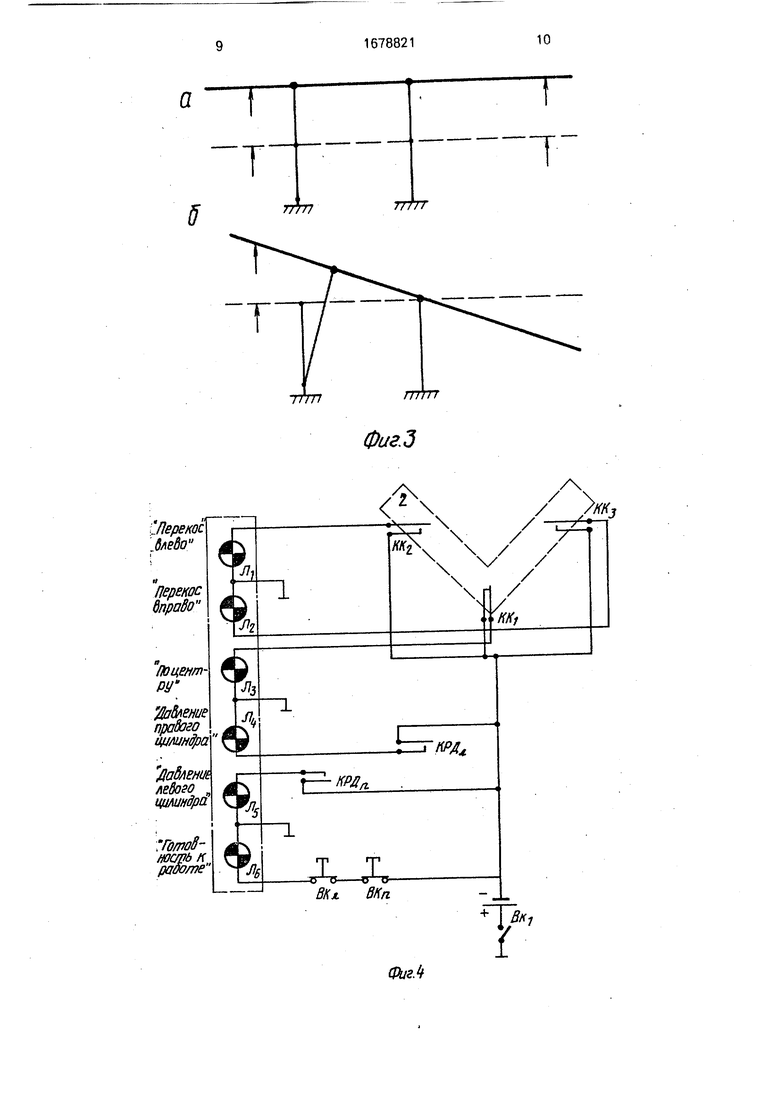
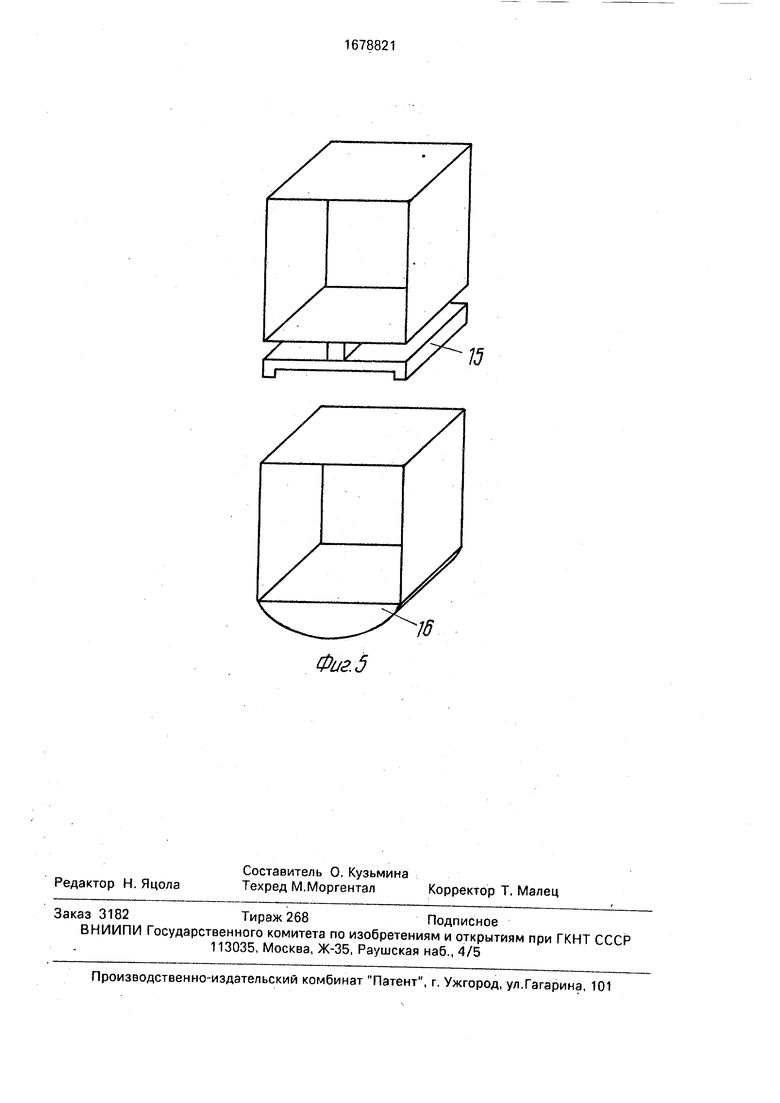
На фиг. 1 показан тренажер для обучения работе домкратом, общий вид; на фиг, 2 - гидравлическая система тренажера; на фиг. 3 - кинематическая схема работы тренажера; на фиг. А - принципиальная электрическая схема тренажера; на фиг. 5 - сменные профильные насадки, общий вид.
Тренажер содержит домкрат, имитатор груза 1, датчик 2 перекоса имитатора груза, блок 3 отображения информации, два плунжерных гидроцилиндра 4 и 5, соединенные шарнирно с имитатором груза, основание 6, гидросистему 7 м 8 управления гидроцилиндром, включающую в себя обратный клапан 9, управляемый сливной золотник 10, регулируемый дроссель 11, реле 12 давления и бак с гидрожидкостью 13. Управление тренажером осуществляется от блока 14 управления (фиг, 1 и 2),
Имитатор груза представляет собой металлическую балку, по центру верхней плоскости которой укреплен датчик 2 перекоса имитатора груза 1, срабатывающий на конечные положения максимально допустимого угла наклона имитатора груза.
Допустимый угол наклона определяется по формуле
-.f J
р arctg
где h - высота домкрата с полностью выдвинутым штоком, мм,
а - размер половины основания домкрата, мм,
b - размер половины опорной поверхности штока домкрата, мм.
Датчик перекоса представляет собой V- образную конусную трубку (например, из стекла) с ртутным шариком внутри.
Электрическая схема управления (фиг. 4) включает в себя лампочки накаливания /Ь - Ле, конечные выключатели ВКл, ВКп, аккумулятор, контакты реле давления КРДл, КРДп, контакты датчика перекоса KKi, КК2, ККз.
Плунжерный гидроцилиндр 4 укреплен при помощи шарнирного соединения к имитатору груза по центру. Он имеет жесткую связь с основанием 6 устройства и.установлен вертикально (перпендикулярно основанию). Плунжерный гидроцилиндр 5 крепится также при помощи шарнирного соединения к имитатору груза на определенном расстоянии от левого конца имитатора груза и шарнирно - к основанию б устройства (фиг. 1).
Основание 6 выполнено в виде металлической коробки, внутри которой размещены
гидросистемы и электрическая часть устройства. Конструкция основания 6 такова, что она рассчитана на максимальные нагрузки, которые могут возникнуть на тренажере. Для формирования навыка устойчивого положения домкрата по вертикальной плоскости у обучаемого .верхняя часть основания выполнена с рельефной поверхностью.
Имитатор груза имеет различные профильные насадки 15 и 16 (фиг. 5), устанавливаемые снизу на имитатор груза для обучения работе при подъеме домкратом трубы или швеллера.
Блок 14 управления (фиг. 1) содержит две кнопки управления сливным золотником 10 с электромагнитным приводом (фиг. 2) левого плунжерного гидроцилиндра и правого плунжерного гидроцилиндра, два регулятора управления дросселем 11 (фиг. 2) левого плунжерного гидроцилиндра и правого плунжерного гидроцилиндра.
Рельефная поверхность 17 (фиг. 1) основания представляет собой разнообразные неровности плоскости, расположенные в хаотическом порядке и выполненные, например, наплавлением толстых швов в хаотическом порядке с помощью электросварки на металлический лист основания устройства. Рельефная поверхность моделирует реальные неровности, на которые может устанавливаться домкрат (например, неровности грунта, стройплощадки и т.п.). Домкрат 18 имеет гибкую связь 19 с имитатором груза 1, которая служит для подстраховки его от опрокидывания и обеспечивает безопасность процесса обучения, В качестве гибкой связи может быть использован стальной канат. В качестве приспособления для выравнивания вертикального положения домкрата применяется набор металлических пластин 20, которые используются при необходимости. Подкладки вставляют между нижней опорной поверхностью домкрата 18 и рельефной поверхностью 17 основания 6 устройства.
Блок 3 отображения информации (фиг. 1) служит для контроля состояния устройства. Блок состоит, например, из оргстекла с нанесенным на нем символами и словами:
Перекос влево, Перекос вправо, По центру, Давление левого цилиндра, Давление правого цилиндра, Готовность к работе, для индикации которых применяются лампы накаливания /1i - Лб (фиг. 4). Конструкция сменных профильных насадок устройства такова, что при установке на
имитатор груза насадка имитирует работу домкрата с различными профилями (фиг. 5),
Обучение с помощью устройства осуществляется следующим образом,
Обучаемый устанавливает домкрат 18 между основанием 6 и имитатором груза 1. Кинематика процесса работы устройства представлена на фиг. 3.
Здесь возможны два оптимальных варианта: устанавливается сразу два домкрата по концам имитатора груза (фиг. 3, а); устанавливается один домкрат с левого конца имитатора груза (фиг. 3, б).
После установки домкрата обучаемый выравнивает домкрат в вертикальной плоскости деревянными и металлическими подкладками, вставляя их между рельефной верхней поверхностью основания и нижней опорой домкрата.
При подъеме домкрата имитатора груза вес груза устанавливается в соответствии с размером щели на дросселе 11 регулятором (фиг. 2), Чем уже щель, тем больше вес имитатора груза 1. Регулятор дросселя градуируется в тоннах. Вес определяется экспериментально при помощи динамометра, который становится между имитатором груза 1 и домкратом, либо рассчитывается по эмпирическим формулам (не приведены).
При установке домкратов по схеме а обучаемые начинают поднимать имитатор груза 1. При этом жидкость из бака 13 гидросистемы 7 и 8 через регулируемый дроссель 11 и через обратный клапан 9 (сливной золотник 10 находится в нормально закрытом состоянии), поступает в гидроцилиндры 4 и 5 под действием перепада давления при выдвижении штока гидроцилиндров,
Для вырабатывания навыка определения центра масс поднимаемого груза в устройстве предусмотрен блок отображения информации, на котором при правильном положении груза высвечивается надпись По центру. При подъеме груза обучаемые контролируют его правильное положение по блоку 3, на котором загорается лампа Л (фиг. 4).
Если один обучаемый поднимает домкрат выше уровня домкрата другого обучаемого и превышает угол наклона, допустимый при работе с данным типом домкрата, то шарик датчика 2 угла наклона (фиг. 1) катится влево, при этом контакт KKi (фиг, 4) размыкается, лампа Лз гаснет. На блоке отображения информации гаснет надпись По центру. Шарик датчика замыкает далее контакт КК2 - загорается лампа Л1 и на блоке высвечивается надпись Перекос влево. При перекосе вправо имитатора груза замыкается контакт ККз датчика и
вспыхивает лампа Ла - Перекос вправо. Производится корректировка груза домкратами. После корректировки шарик датчика 2 должен находиться по центру, при этом замыкаются контакты KKi - загорается лампа Лз - По центру.
После достижения максимальной рабочей высоты домкрата, домкраты убираются из-под имитатора груза 1 обратным ходом
0 рукоятки домкрата. Срабатывает гидросистема 7 и 8 устройства, и имитатор груза остается в максимально допустимом положении. При этом срабатывает реле 12 давления гидросистемы 7 и 8 (фиг. 2),
5 замыкаются контакты реле КРДЛ, КРДП, загораются лампы Лд, ЛБ (фиг, 4) - на табло блока загораются надписи Давление правого цилиндра, Давление левого цилиндра, которые служат для контроля состояния
0 устройства и означают, что домкраты из-под имитатора груза удалены и имитатор груза давит тяжестью своего веса на гидроцилиндры. Таким образом, Гидросистема 7 и 8 обеспечивает безопасность обучения и по5 зволяет контролировать опускание имитатора груза.
Затем мастером производственного обучения от блока управления открывается золотник 10 гидросистемы 7 и 8, жидкость
0 из плунжерных гидроцилиндров выдавливается под действием собственного веса имитатора груза 1 в бак 13 гидросистемы и груз опускается до упора на гидроцилиндры. В исходном состоянии загорается лам5 па Лб Готовность к работе, при этом замыкаются контакты ВКЛ, ВКП концевых выключателей, укрепленных на верхних торцах гидроцилиндров 4 и 5 и срабатывающих от соприкосновения с нижней поверхно0 стью имитатора груза 1. Надпись Готовность к работе означает, что устройство готово к обучению очередного обучаемого. Работа устройства в другом варианте (по схеме б) отличается тем, что домкрат
5 устанавливается с левого конца имитатора груза и обучение производится только для одного обучаемого. В этом случае гидроцилиндр 4 не работает, а работает только гид- роцилиндр 5 и, соответственно,
0 корректировка угла наклона имитатора груза не производится. Показания датчика 2 угла наклона при этом не принимается во внимание. В остальном работа устройства аналогична работе по схеме а.
5
Формула изобретения 1. Тренажер преимущественно для обучения работе домкратом, содержащий основание, на котором закреплены вертикально расположенные гидроцилиндры, со штоками которых шарнирно соединен имитатор груза, дроссели и гидролинии, отличающийся тем, что, с целью повышения безопасности, он снабжен баком, обратными клапанами, управляемыми сливными золотниками, блоком управления, установленным на- имитаторе груза датчиком перекоса, подключенными к рабочим полостям гидроцилиндров реле давления и блоком отображения информации, к которому подключены выходы датчика перекоса и реле давления, рабочие полости каждого, гидроцилиндра сообщены с баком через параллельные гидролинии, в одной из которых последовательно установлены дроссель.
L.IM:.ZJ
выполненный регулируемым, и обратный клапан, а в другой - управляемый сливной золотник, причем цепи управления регулируемого дросселя и управляемого сливного
золотника соединены с блоком управления, при этом один из гидроцилиндров жестко закреплен на основании, а другой - шарнирно.
рельефной.
г
8
L
Фаг. Z
а
Т
5
77777
77777
„Перекос. Зледо
Перекос вправо
Поцент- РУ
ДрВление
правого
щмндра
Давлент
левого
цилиндра
Тотоб- нос/рь к работе
77777
rm rl
Фие.З
Фиг. 5
| Устройство для тренировки тяжелоатлетов | 1987 |
|
SU1417890A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
