Изобретение относится к авиационному приборостроению и может быть исполь- зовано на летательных аппаратах различного класса с преимущественным применением в легкомоторной авиации.
Цель изобретения - упрощение конструкции датчика.
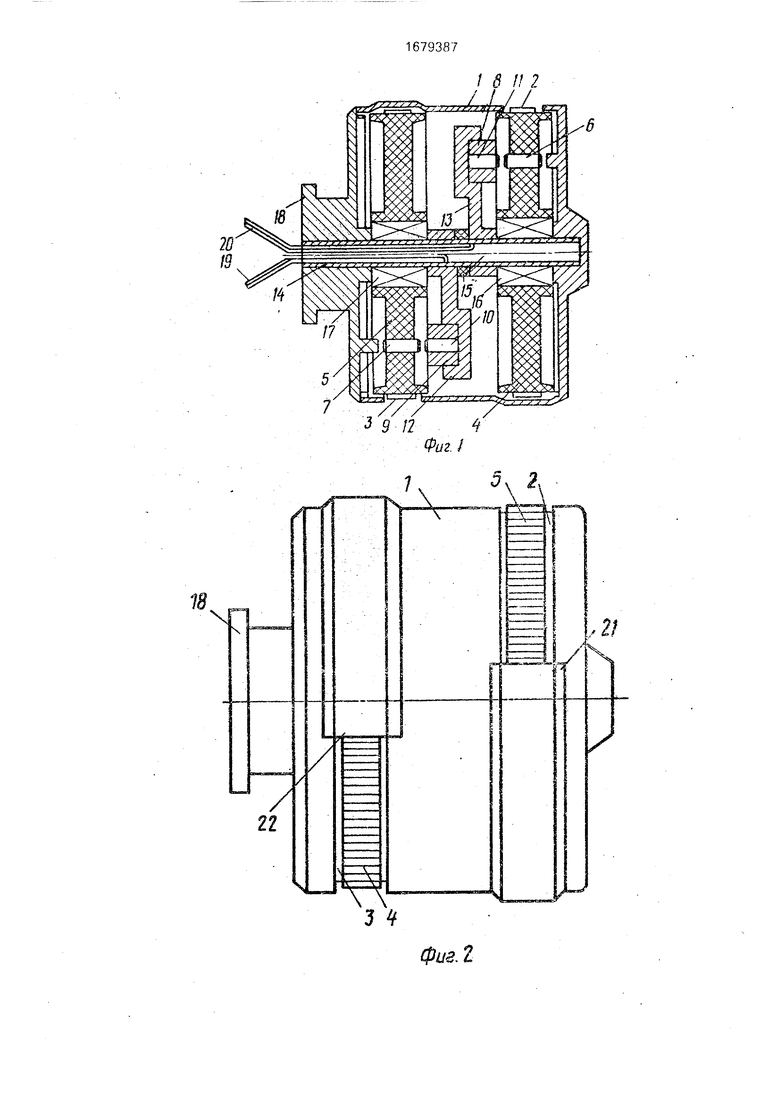
На фиг.1 приведена конструкция датчика аэродинамических углов, разрез; на фиг. 2 - то же, общий вид; на фиг. 3 - установка датчика на летательном аппарате.
Датчик аэродинамических углов содержит корпус 1 цилиндрической формы, имеющий два выреза 2 и 3 на противоположных сторонах, причем передние кромки обоих вырезов смещены в разных направлениях относительно плоскости симметрии на величину максимально измеряемого этим датчиком аэродинамического угла, а задние кромки вырезов расположены по одной линии. Такое расположение вырезов 2 и 3 обеспечивает разделение встречного потока на две составляющие, воздействующие
на первый 4 и второй 5 чувствительные элементы, которые меют форму,например, зубчатой шестерни из легкого и прочного материала.
В тело каждого чувствительного элемента 4 и 5 запрессованы постоянные магниты 6 и 7. Электромагнитные катушки 8 и 9, внутри которых находятся сердечники 10 и 11 из мэгнитомягкого материала, размещены в магнитопроводах 12 и 13, расположенных на неподвижной оси 14 и жестко зафиксированных относительно корпуса 1. Изоляционная прокладка 15 разделяет магнитные цепи узлов преобразования. Чувствительные элементы 4 и 5 с подшипниками 16 и 17 установлены на оси 14. Фланец 18 предназначен для крепления датчика к корпусу летательного аппарата. Выводы 19 и 20 узлов преобразования соединяются с входами измерителя аэродинамических углов.
Передние кромки 21 и 22 вырезов в корпусе 1 (фиг.2) смещены в противоположные стороны от плоскости симметрии. Это смеил
о
si
ю со с
4
щение берется равным максимальному аэродинамичесому углу, измеряемому данным датчиком. Например, если максимально допустимый угол атаки для летательного аппарата составляет 20°, то и -смещение кромки выреза должно соответствовать 20°, если максимально допустимый угол атаки для другого типа летательного аппарата со- ставляект 30°, то и смещение должно соответствовать 30° Задние кромки вмоезов расположены по одной линии.
Датчик работает следующим образом.
В процессе полета летательного аппарата скоростной напор встречного потока за счет вырезов 2 и 3 в корпусе 1 датчика разделяется на две составляющие потока, которые воздействуют на чувствительные элементы 4 и 5 и приводят их во вращение в противоположные стороны. При вращении чувствительных элементов 4 и 5 посто- янные магниты 6 и 7 взаимодействуют с электромагнитными катушками 8 и 9 и наводят в них импульсы ЭДС, частота которых прямо пропорциональна скорости вращения каждого чувствительного элемента. Со- единив выводы 19 и 20 с входами измерителя, на входах последнего получают импульсы напряжения.с частотой, пропорциональной скорости вращения чувствительных элементов 4 и 5. При этом принимают допущение, что конструктивные размеры чувствительных элементов, вырезов в корпусе совпадают, трение в подшипниках одинаково, коэффициенты сцепления воздушного потока с поверхностями чувст- вительных элементов равны и т.д. В этом случае основными факторами, определяющими скорости вращения каждого чувствительного элемента, будут являться скорость движения встречного потока и направление вектора скоростного напора,
Численное значение каждой составляющей потока зависит от скорости летательного аппарата от направления вектора потока, от площади чувствительных элемен-
тов и других факторов. Если положение оси чувствительности датчика совпадает с направлением вектора скоростного напора, то значения составляющих потока (при вышеперечисленных допущенных) будут равны, вращение обоих чувствительных элементов 4 и 5 будет происходить с одинаковой угловой скоростью, с выходов 19 и 20 преобразователей на входы измерителя будут поступать импульсы с равной частотой f h и разность этих частот будет равна нулю, что соответствует нулевому отклонению аэродинамического угла. При изменении направления вектора скоростного напора будет изменяться положение точки приложения его равнодействующей к поверхности датчика и, значит, воздействие составляющих воздушного потока на чувствительные элементы будет меняться, вследствие чего скорость вращения одного чувствительного элемента будет возрастать, а другого уменьшаться, и с выходов 19 и 20 на измеритель будут поступать импульсы с разной частотой, разность которых будет пропорциональна измеряемому аэродинамическому углу летательного аппарата.
Формула изобретения Датчик аэродинамических углов, содержащий первый и второй чувствительные элементы, первый и второй узлы сьема сигнала, отличающийся тем, что, с целью упрощения, чувствительные элементы выполнены в виде зубчатых шестерен, установленных с возможностью вращения на оси, жестко закрепленной в полом цилиндрическом корпусе, в котором над зубчатыми шестернями выполнены два диаметрально расположенных выреза, при этом каждый из узлов съема сигнала состоит из постоянного магнита, запрессованного в зубчатую шестерню, и катушки, намотанной на ферромаг- нитный сердечник, закрепленный на неподвижной оси напротив постоянного магнита.
/ 8 П 2
лг /д/д/г-А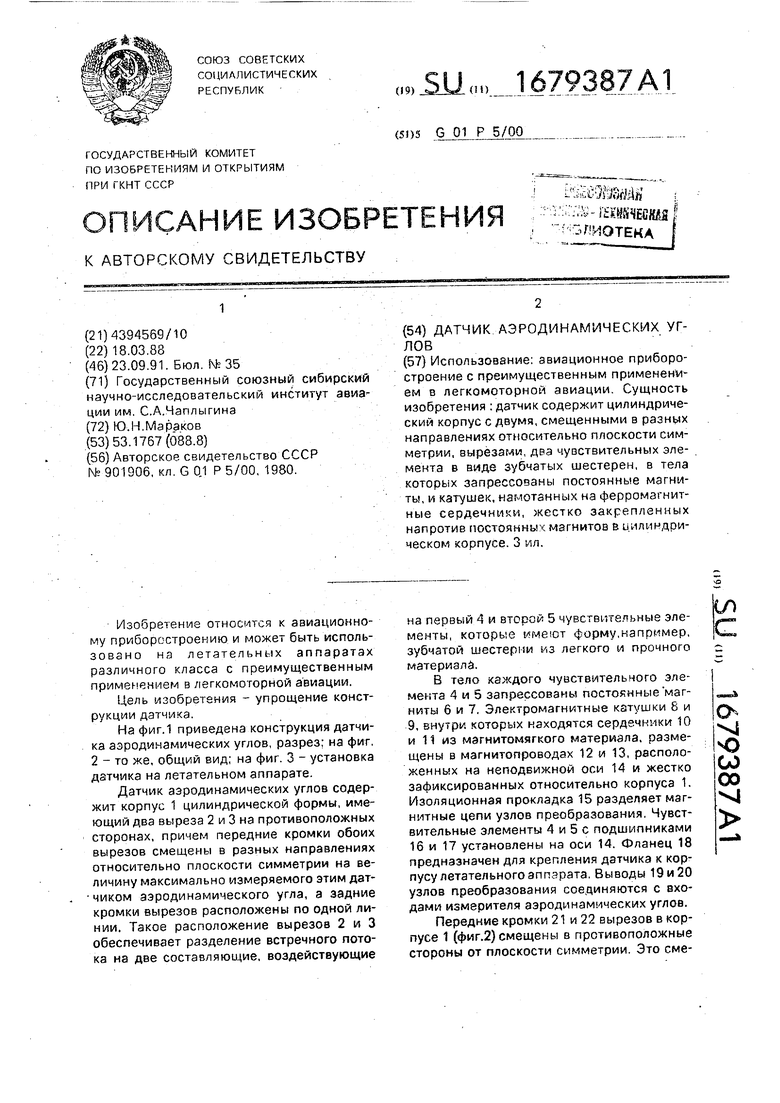

| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| Измеритель скоростного напора | 1979 |
|
SU873129A1 |
| Устройство для повышения поперечной устойчивости наземного транспортного средства | 1979 |
|
SU867758A1 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2012 |
|
RU2506596C1 |
| Способ трехосного измерения воздушной скорости | 2020 |
|
RU2765800C1 |
| Трехосный измеритель воздушной скорости | 2020 |
|
RU2762539C1 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах | 2016 |
|
RU2612337C1 |

Использование: авиационное приборостроение с преимущественным применена ем в легкомоторной авиации. Сущность изобретения : датчик содержит цилиндрический корпус с двумя, смещенными в разных направлениях относительно плоскости симметрии, вырезами, два чувствительных элемента в виде зубчатых шестерен, в тела которых запрессованы постоянные магниты, и катушек, намотанных на ферромагнитные сердечники, жестко закрепленных напротив постоянных магнитов в иилиидри- ческом корпусе. 3 ил.
фиг. 2
Датчик угла скольжения
Датчик уела ctma/tu
Фиг.З
| Устройство для измерения распределенной температуры теплоносителя проходной нагревательной печи | 1980 |
|
SU901306A1 |
| G 0.1 Р 5/00, 1980. | |||
