Предложенный способ измерения воздушной скорости относится к авиации, измерению скорости летательных аппаратов в трех измерениях. Изобретение может быть использовано при построении навигационных систем пилотирования.
Известны аэродинамические способы измерения воздушной скорости, например измерение комбинированной трубкой Пито-Прандтля. Недостатком способа является ошибочная разность давлений полного и статического ΔР=Рп- Рст, зависимая от его формы и размеров и не равная истинной разности давлений при различной скорости полета.
Известен способ измерения малых воздушных скоростей вертолета (RU 2426995 С1, 20.08.2011) с помощью неподвижного сферического тела, установленного на фюзеляже. Симметрично оси сферического тела в плоскостях, параллельной плоскости симметрии вертолета и ортогональной к ней, расположены наклонные отверстия для забора (приемники) давлений, определяющие угловое положение набегающего потока в указанных ортогональных плоскостях. На поверхности сферического тела по окружности расположены отверстия для забора (приемники) статического давления результирующего набегающего воздушного потока. Приемники давлений и температуры подключены ко входам пневмоэлектрических преобразователей, например перепада давлений или термоанемометрическим, выходы которых подключены к микропроцессору, который вычисляет три составляющие вектора истинной воздушной скорости, углы атаки и скольжения.
Недостатком известного способа является наличие длинных проточных трубопроводов, увеличивающих время запаздывания сигнала, значительное число термоанемометров измерения расхода по сигнальным трубопроводам, требующим согласования, аналоговая передача сигналов давления, подверженных влиянию температуры и плотности, обязательно наличие сигнала Рп полного давления и сигнала Рст статического давления и связанного с этими сигналами вычислительной операции определения воздушной скорости.
Известен способ измерения воздушных скоростей, принятый за прототип (http://aeropribor.ru/production/5/64. Система измерения воздушных параметров вертолета СИ ВПВ-52. Просмотрена 05.11.2020).
Недостаток известного способа состоит в наличии значительного числа термоанемометров измерения расхода по сигнальным проточным трубопроводам, требующим согласования, аналоговая обработка сигналов давления, подверженных влиянию температуры, плотности и высоты полета, обязательно наличие сигнала Рп полного давления и сигнала Рст статического давления и связанного с этими сигналами вычислительной операции определения воздушной скорости, первичные чувствительные элементы требуют электропитания, для определения сигнала истинной воздушной скорости обязательное наличие двух комплектов измерителей по обе стороны фюзеляжа, большие погрешности измерения малых скоростей.
Техническим результатом является упрощенный способ построения системы измерения истинной воздушной скорости в трех измерениях.
Технический результат достигается тем, что по способу трехосного измерения воздушной скорости набегающие прямой и обратный скоростные потоки воздуха по трем пространственным осям доставляют к входам патрубков, расположенных в обтекаемом корпусе, проводят потоки через сопла питания проточных струйных автогенераторов с частотным выходом пневматических давлений, преобразуют пневматический частотный выход через пневмоэлектропреобразователи в электрический частотный сигнал, подают его в микропроцессор, определяют векторы воздушной скорости, остаточный поток выводят вне корпуса через сопло выхода.
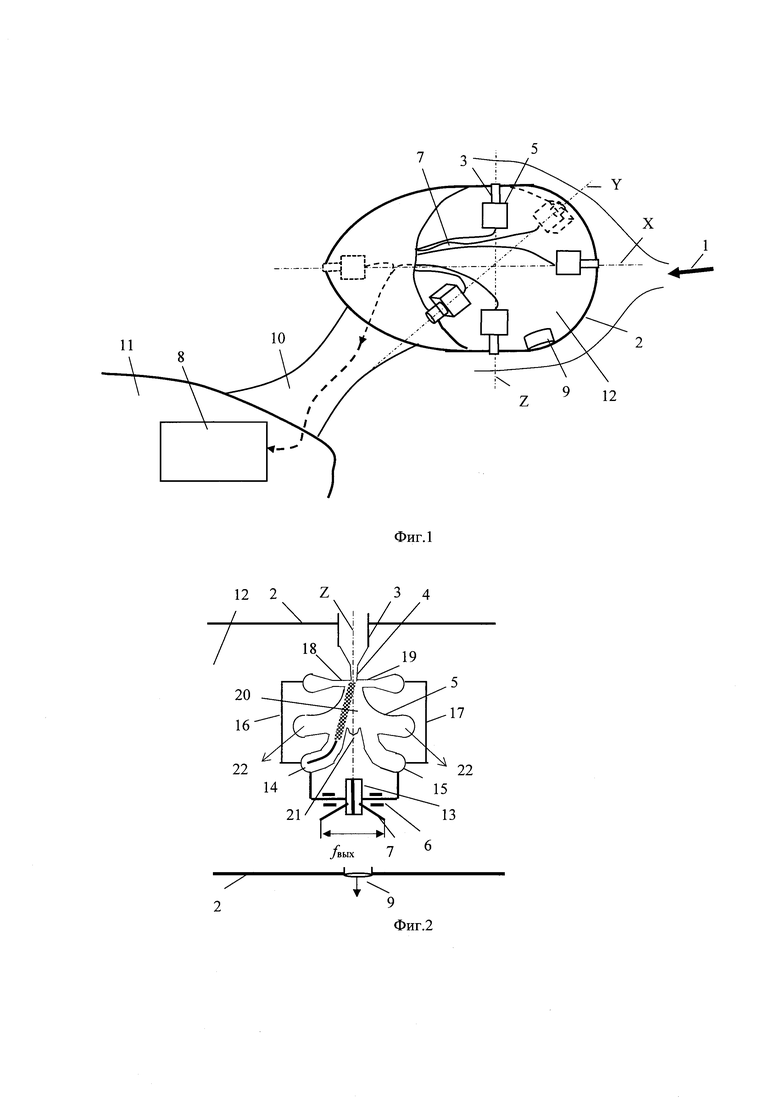
На фиг. 1 показана схема трехосного измерения воздушной скорости по способу.
На фиг. 2 показано выполнение струйного автогенератора в качестве приемника по одному типовому направлению набегающей воздушной скорости.
По способу (схема фиг. 1) проводят прямой и обратный набегающий скоростной поток 1 воздуха в трех плоскостях во входы патрубков 3, расположенные симметрично по трем осям (тангаж - ось Y, рысканье - ось Z и крен - ось X) в обтекаемом корпусе 2, проводят потоки через сопла 4 питания (фиг. 2) проточных струйных автогенераторов 5 с частотным выходом пневматических давлений, преобразуют пневматический частотный выход через дроссели 6 и камеры (не обозначены на фиг. 2) пневмоэлектропреобразователя 13 (фиг. 2) в электрический частотный сигнал, подают его по электрокабелям 7 в микропроцессор 8, определяющий векторы воздушной скорости, остаточный поток выводят вне корпуса через сопло выхода 9. Корпус 2 установлен на опоре 10 к фюзеляжу 11. Работает так.
Параметрические данные воздушного потока по способу измеряются прибором, выполненным по схеме (фиг. 1), который устанавливается, например, на переднюю часть фюзеляжа ЛА для дифференциального измерения истинных воздушных скоростей.
Для измерения скорости, например по одной оси, используется проточный приемник воздушной скорости (ПВС). В проточном приборе ПВС скоростной напор (динамическое давление), содержащий непосредственную информацию о скорости, освобожденный от величины статического давления, определяется с помощью колебаний струйного течения из квадратичной зависимости. Функциональная зависимость в частотной форме, свойственная физической природе колебаний, выражается линейной связью между величинами скорости потока и частотой колебаний выходного давления струйного автогенератора.
Предложенная схема (фиг. 1) построена на проточных ПВС, основой работы которой является струйный автогенератор (фиг. 2). Струйный автогенератор реализован в виде струйного усилителя, образующим замкнутую обратными связями функциональное устройство с частотным выходом струйных колебаний, далее выраженными колебаниями пневматического давления в камерах пневмоэлектропреобразователя.
Полное давление (статическое и динамическое) струи питания в струйном усилителе преобразуется в переменное давление в пьезопреобразователе, равное динамическому давлению скоростного напора, за вычетом статического давления окружающей среды по физической природе измерения.
Измерение скорости V приемником ПВС с помощью струйного автогенератора происходит в непроточной камере, корпус приемника ПВС является проточным. Приемником ПВС с помощью струйного генератора фактически измеряется динамическое давление истекающего скоростного потока из сопла струйного усилителя, преобразованного из полного давления скоростного внешнего потока. Т.е. происходит физическое вычитание величины статического давления из величины полного давления скоростного напора струи питания струйного элемента. Как сама постоянная величина, так и плавное изменение величины статического давления в виде воздействия на пьезопреобразователь не вносит ошибки в электрический выходной сигнал при частотном измерении колебаний.
Проточные выходы потока усилителей всех автогенераторов 5 (показан один для примера на фиг. 2) сведены в общую камеру 12 и далее через сопло выхода 9 в окружающую среду. Частота колебаний сигналов давления автогенератора преобразуется в электрический сигнал пьезопреобразователем 13 (фиг. 2). Такой струйный ПВС (скоростемер) с диапазоном измерения по скорости 1:10 укладывается в класс - 1, с диапазоном 1:20 - в класс 1,5.
Воздушный поток 1 поступает на входной обтекатель 2 через входной патрубок 3 в сопло 4 автогенератора 5 (фиг. 2). Струйный автогенератор 5 представляет собой струйный бистабильный элемент, приемные каналы (14, 15) которого соединены каналами обратной связи (16, 17) с соплами управления (18, 19). При работе автогенератора струя воздушного потока, вытекающая из сопла 3 в рабочую камеру взаимодействия 20, отклоняется к одной из стенок, например к левой стенке, и прижимается к ней давлением, которое создается потоком, отраженным вогнутым дефлектором 21. Струя течет вдоль левой стенки и попадает в приемный канал 14. Набор давления из-за некоторого торможения в приемном канале 14 вызывает разгон среды в канале обратной связи 16. Через некоторое время tзап запаздывания в канале обратной связи 16 расход в сопле управления 18 достигает величины расхода переключения Qcp, что приводит к отрыву струи от левой стенки и перемещение ее к правой стенке. Струя достигает правой стенки, и через некоторое время транспортного запаздывания t тр в камере взаимодействия струйного усилителя 5. в приемном канале 15 повышается давление (при этом в канале 14 оно становится равным давлению в камере). Спустя некоторое время tзап - время прохождения по каналу обратной связи 17-расход в сопле управления 19 достигает величины Qcp, и струя перемещается к левой стенке и попадает в приемный канал 14 и процесс повторяется. Начнется новый период колебания и возникают устойчивые автоколебания струи в автогенераторе 5. Частота переключений пропорциональна скорости воздуха через сопло питания 3 струйного элемента.
Известно свойство струйного автогенератора - частота ƒ линейно зависит от скорости течения и не зависит от плотности измеряемой среды ρ. С повышением плотности измеряемой среды растет одновременно перепад давления в той же доле на измерителе, при этом показания по скорости V не меняются.
Далее из сливной камеры 22 воздух выходит через сопло выхода 9 в атмосферу. Частота колебаний пневматических сигналов давления струйного автогенератора 5 пьезопреобразователем 13 передается через разъемы по электрокабелю 7 в микропроцессор 8.
Векторы скорости набегающего потока под углом к входному соплу 3 автогенератора 5 имеют меньшую величину модуля и, следовательно, меньшую величину выходной частоты ƒвых.
При изменении направления набегающего потока воздуха изменяется распределение скоростей по поверхности обтекаемого тела и по разнице двух величин скоростей на разных сторонах корпуса 2 можно судить о местном угле набегающего потока, который функционально связан с аэродинамическим углом.
В силу того, что местный угол скоса потока вычисляется фактически по разнице указанных двух воздушных скоростей в автогенераторе с преобразованием в частотный электросигнал, то исключение пневмотрасс с запаздыванием сигнала значительно снижает погрешности измерения угла скоса потока.
Струйные автогенераторы 5 преобразуют сигнал скорости в электрический сигнал частоты и в цифровом виде значения частоты передаются в вычислитель 8, где производится вычисление высотно-скоростных параметров.
Вычисленные скоростные параметры и местные аэродинамические углы скольжения β, рысканья ψ, тангажа υ и крена γ передаются далее по кодовым линиям связи на индикацию экипажу, в систему автоматического управления (автопилот), в систему регистрации параметров и в прочее бортовое оборудование летательного аппарата.
Приближение к опасному режиму пилотирования со скоростью V≅2-4 м/с, при наличии датчиков ПВС, можно исключить фиксацией частоты ƒ≅<ƒMIN сигналом ПВС, не меняющей своей величины от высоты полета Н, что существенно для безопасности полета в горной местности.
Перечислим приобретаемые свойства системой измерения при использовании предложенного способа измерения воздушной скорости:
1 - измеряется только динамическое давление, статическое давление не влияет на измерение пьезопреобразователем, т.е. автоматически из полного давления вычитается статическое давление;
2 - измеряется воздушная скорость, на величину которой не влияет изменение плотности ρ среды, и не зависит от высоты полета;
3 - при частотном способе измерения скорости набегающего потока V характеристика выходной частоты ƒ от скорости V линейная;
4 - отсутствует необходимость поправок на величину опасной черты по скорости при разной высоте- у земли или в горах, т.е. показания опасной частоты одни и те же при разных параметрах полета вертолета и температуры окружающей среды;
5 - измеряется истинная скорость потока воздушной среды, включая ветер;
6 - предложен способ измерения для различных ЛА, по которому измеряется, а не вычисляется, истинная воздушная скорость непосредственно аэродинамическим способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехосный измеритель воздушной скорости | 2020 |
|
RU2762539C1 |
| Измеритель воздушной скорости | 2017 |
|
RU2672037C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА В ЧАСТОТУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413269C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
Изобретение относится к области авиации, а именно к измерению скорости летательных аппаратов в трех измерениях. Способ трехосного измерения воздушной скорости содержит этапы, на которых набегающие прямой и обратный скоростные потоки воздуха по трем пространственным осям доставляют к входам патрубков, расположенных в обтекаемом корпусе, проводят потоки через сопла питания проточных струйных автогенераторов с частотным выходом пневматических давлений, выводят потоки в общую камеру всех автогенераторов и далее остаточный поток выводят вне корпуса через сопло выхода в окружающую среду, преобразуют пневматический частотный выход через свои пневмоэлектропреобразователи в электрический частотный сигнал, подают его в цифровом виде значения частоты в микропроцессор, определяют векторы и углы воздушной скорости по разнице двух величин скоростей на разных сторонах корпуса. Техническим результатом является упрощенное построение системы измерения истинной воздушной скорости в трех измерениях. 2 ил.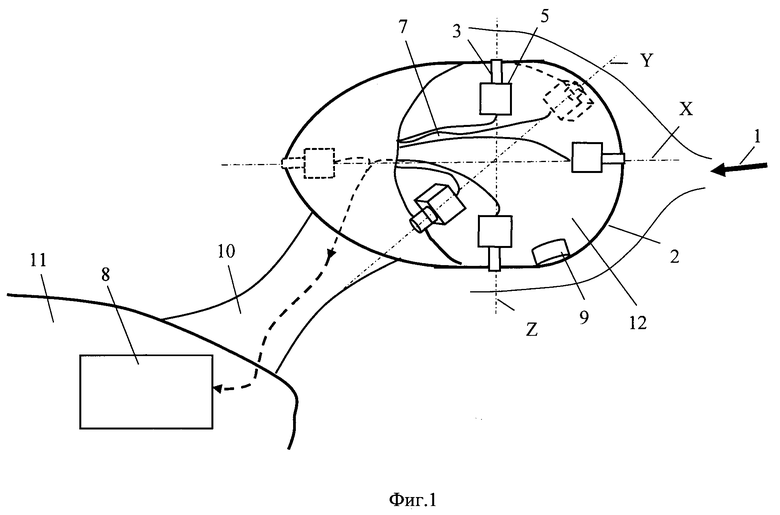
Способ трехосного измерения воздушной скорости, характеризующийся тем, что набегающие прямой и обратный скоростные потоки воздуха по трем пространственным осям доставляют к входам патрубков, расположенных в обтекаемом корпусе, проводят потоки через сопла питания проточных струйных автогенераторов с частотным выходом пневматических давлений, выводят потоки в общую камеру всех автогенераторов и далее остаточный поток выводят вне корпуса через сопло выхода в окружающую среду, преобразуют пневматический частотный выход через свои пневмоэлектропреобразователи в электрический частотный сигнал, подают его в цифровом виде значения частоты в микропроцессор, определяют векторы и углы воздушной скорости по разнице двух величин скоростей на разных сторонах корпуса.
| Измеритель воздушной скорости | 2017 |
|
RU2672037C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1548988A1 |
| US 3364741 A, 23.01.1968. | |||

