Изобретение относится к калибровочной, контрольно-измерительной и испытательной технике и позволяет оптимизировать процедуру поверки, контроля работоспособности и калибровки сейсмических датчиков и, следовательно, повысить точность сейсморазведочных измерений.
Известно устройство для калибровки сейсмических датчиков (патент RU 2599183) содержащее неподвижное основание, на котором закреплен жесткий упор и подвижная платформа. На ближней к упору стороне закреплены калибруемый сейсмический датчик, датчик для измерения скорости движения подвижной платформы относительно неподвижного основания и катушка, жестко закрепленная на подвижной платформе. На неподвижном основании, напротив жесткого упора, в контакте с противоположным боком подвижной платформы установлен упругий упор, выполненный с возможностью введения калиброванного по толщине щупа между жестким упором и подвижной платформой.
Недостатками данного технического решения является относительная сложность конструкции и невозможность проводить многократные измерения без приведения устройства в готовность путем ручной установки щупа, что увеличивает трудоемкость и время испытаний.
Известен низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников (патент RU 2757971) включающий бесконтактный электропривод, подвижную вращающуюся платформу, балансировочные грузы, установленные на подвижной вращающейся платформе, блок электроники, состоящий из внутреннего источника питания, понижающего преобразователя, микроконтроллера, датчика влажности и температуры, информационного дисплея и цифрового входа для подключения к компьютеру. Также на подвижной платформе установлен блок микромеханических датчиков для контроля ее углового положения и контроля углового положения двух полуосей, на которых закреплена подвижная платформа, относительно плоскости горизонта.
Недостатками данного технического решения являются относительная сложность конструкции и невозможность получения достоверных результатов измерений приходящих объемных волн.
Наиболее близким по технической сущности и достигаемому эффекту к заявленному изобретению является устройство, описанное в авторском свидетельстве SU 1430922 «Способ исследования сейсмоприемников» состоящее из возбуждающих электромеханических преобразователей горизонтальной вибрационной платформы, контрольного датчика горизонтальной вибрационной платформы, возбуждающих электромеханических преобразователей вертикальной платформы, контрольного датчика вертикальной виброплатформы, электрической линии задержки и регулятора амплитуд, подключенных к возбуждающим преобразователям горизонтальной вибрационной платформы, электрической линии задержки и регулятора амплитуд, подключенных к возбуждающим преобразователям вертикальной виброплатформы, низкочастотного генератора, электронно-лучевых осциллографов и поворотного устройства с трехкомпонентной расстановкой на нем сейсмоприемников.
Недостатком данного технического решения являются особенность конструкции, включающая свободный подвес стола с сейсмоприемниками на пружинах и приводящая к возникновению паразитных резонансных колебаний в вертикальной, либо горизонтальной плоскостях.
Цель изобретения - создание устройства, позволяющего повысить информативность измерений и моделировать явление интерференции колебательных процессов.
Поставленная цель достигается тем, что предложен двухкоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков (Фиг. 1), состоящий из неподвижного основания [7], на котором находится подвижный стол [21], способный двигаться возвратно - поступательно в направлении X относительно неподвижного основания [7], посредством направляющих типа «ласточкин хвост» [9], электрического двигателя [8], червячного редуктора [13], с выходным валом [16]. На торце выходного вала редуктора [16] установлен шариковый подшипник [14] со смещением, заданным при изготовлении, от оси вращения выходного вала редуктора [16]. Амплитуда (от 0,1 мм до 2 мм) возвратно-поступательных движений подвижного стола задается при изготовлении выходного вала редуктора степенью смещения подшипника от оси вращения выходного вала, а частота возвратно-поступательных движений подвижного стола - определяется величиной напряжения, подаваемого на электрический двигатель [8] редуктора [13]. Своей внешней обоймой подшипник [14] соприкасается с торцом [10] подвижного стола [21]. Подвижный стол [21] способный двигаться возвратно - поступательно в направлении X посредством направляющих типа «ласточкин хвост» [9] относительно неподвижного основания [7]. С торца [17] подвижного стола [21] устанавливают пружинный механизм, поджимающий подвижный стол к внешней обойме подшипника [14]. Пружинный механизм состоит из спиральной пружины [12], одним концом опирающейся на торец стола [17], а другой конец пружины поджимается винтом [15] с головкой [11], проходящим сквозь пружину [12], с гайкой [18], закрепленной на неподвижном основании [7] под подвижным столом [17]. Вращением винта в гайке меняется величина сжатия пружины [12]. Узел перемещения по направлению Y состоящий из электрического двигателя [1], червячного редуктора [2], с выходным валом [5]. На торце выходного вала редуктора [5] установлен шариковый подшипник [3] со смещением, заданным при изготовлении, от оси вращения выходного вала редуктора [5]. Амплитуда (от 0,1 мм до 2 мм) возвратно-поступательных движений подвижного стола задается при изготовлении выходного вала редуктора степенью смещения подшипника от оси вращения выходного вала, а частота возвратно-поступательных движений подвижного стола - определяется величиной напряжения, подаваемого на электрический двигатель [1] редуктора [2]. Своей внешней обоймой подшипник [3] соприкасается с торцом [4] подвижного стола [6]. Подвижный стол [6] способный двигаться возвратно - поступательно в направлении Y посредством направляющих типа «ласточкин хвост» [19] относительно подвижного стола [21] движущегося возвратно - поступательно в направлении X. С торца [23] подвижного стола [6] устанавливают пружинный механизм, поджимающий подвижный стол к внешней обойме подшипника [3]. Пружинный механизм состоит из спиральной пружины [24], одним концом опирающейся на торец стола [23], а другой конец пружины поджимается винтом [22] с головкой [25], проходящим сквозь пружину [24], с гайкой [20], закрепленной на подвижном столе [21] под подвижным столом [6]. Вращением винта в гайке меняется величина сжатия пружины [24]. На подвижном столе [6] устанавливаются сейсмические датчики, подлежащие исследованию и калибровке.
Стенд работает следующим образом: при перемещении подвижного стола по направлению X: вращение электрического двигателя [8] посредством червячного редуктора [13] передается на выходной вал редуктора [16] на торце которого со смещением (задаваемым при изготовлении выходного вала редуктора), от его оси вращения закреплен шариковый подшипник [14]. Эксцентрично вращающийся подшипник своей внешней обоймой, находящейся в плотном контакте с торцом [10] подвижного стола, передает смещение на подвижный стол [21]. Возврат стола с обеспечением безлюфтового постоянного прижима к подшипнику обеспечивает предварительно сжатая пружина [12], прижатая к противоположному торцу [15] подвижного стола. Совместное действие вращающегося с эксцентриситетом подшипника, находящегося на выходном валу червячного редуктора и спиральной пружины обеспечивают плавное без зазорное возвратно - поступательное движение подвижного стола по направлению X, которое передается установленному на нем подвижному столу [4] с установленным на нем сейсмическим датчиком подлежащем исследованию и калибровке. Амплитуда (от 0,1 мм до 2 мм) возвратно-поступательных движений подвижного стола задается при изготовлении выходного вала редуктора степенью смещения подшипника от оси вращения выходного вала, а частота возвратно-поступательных движений подвижного стола - определяется величиной напряжения, подаваемого на электрический двигатель редуктора.
При перемещении подвижного стола по направлению Y: вращение электрического двигателя [1] посредством червячного редуктора [2] передается на выходной вал редуктора [5] на торце которого со смещением (задаваемым при изготовлении выходного вала редуктора), от его оси вращения закреплен шариковый подшипник [3]. Эксцентрично вращающийся подшипник своей внешней обоймой, находящейся в плотном контакте с торцом [4] подвижного стола, передает смещение на подвижный стол [6]. Возврат стола с обеспечением безлюфтового постоянного прижима к подшипнику обеспечивает предварительно сжатая пружина [24], прижатая к противоположному торцу [23] подвижного стола. Совместное действие вращающегося с эксцентриситетом подшипника, находящегося на выходном валу червячного редуктора и спиральной пружины обеспечивают плавное беззазорное возвратно - поступательное движение подвижного стола по направлению Y с установленным на нем сейсмическим датчиком подлежащем исследованию и калибровке. Амплитуда (от 0,1 мм до 2 мм) возвратно-поступательных движений подвижного стола задается при изготовлении выходного вала редуктора степенью смещения подшипника от оси вращения выходного вала, а частота возвратно-поступательных движений подвижного стола - определяется величиной напряжения, подаваемого на электрический двигатель редуктора. Одновременная работа обоих механизмов возвратно-поступательного перемещения в направлениях X и Y позволяет возбуждать в исследуемом датчике колебания в обоих направлениях. Раздельная работа механизмов возвратно-поступательного перемещения по направлению X или Y позволяет возбуждать в исследуемом датчике колебания в одном направлении. При подаче различных напряжений на электродвигатели [1] и [8] возможно одновременное возбуждение колебаний в исследуемом сейсмическом датчике с различной частотой по направлениям X и Y.
Новым в предложенном двухкоординатном низкочастотном стенде для исследования и калибровки сейсмических датчиков является наличие подвижного стола, способного перемещаться независимо по направлениям X и Y, направляющих подвижного стола типа «ласточкин хвост», пружинных механизмов возврата подвижного стола для каждого направления X и Y, состоящих из спиральной пружины, винта с гайкой и независимых механизмов возбуждения возвратно-поступательного движения подвижного стола по направлениям X и Y, состоящих из электрического двигателя, червячного редуктора и выходного вала, шарикового подшипника, установленного со смещением от оси вращения выходного вала.
Пример конкретного выполнения.
Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков состоит из чугунного неподвижного основания, размером 250 мм на 250 мм, на котором находится подвижный стол длиной 300 мм и шириной 120 мм, выполненный из стали. Подвижный стол на направляющих типа «ласточкин хвост» может совершать возвратно - поступательные движения, относительно неподвижного основания по направлениям X и Y одновременно либо по отдельности. Исследуемый сейсмический датчик устанавливается на подвижный стол сверху.
Амплитуда (от 0,1 мм до 2 мм) возвратно-поступательных движений подвижного стола по каждому из направлений X либо Y задается при изготовлении выходного вала редуктора степенью смещения подшипника от оси вращения выходного вала, а частота возвратно-поступательных движений подвижного стола - определяется величиной напряжения, подаваемого на электрический двигатель редуктора. Одновременная работа обоих механизмов возвратно-поступательного перемещения в направлениях X и Y позволяет возбуждать в исследуемом датчике колебания в обоих направлениях. Раздельная работа механизмов возвратно-поступательного перемещения по направлению X или Y позволяет возбуждать в исследуемом датчике колебания в одном направлении. При подаче различных напряжений на электродвигатели и возможно одновременное возбуждение колебаний в исследуемом сейсмическом датчике с различной частотой по направлениям X и Y.
Пружинные механизмы возврата подвижного стола по направлениям X и Y имеют одинаковую конструкцию и состоят из спиральной пружины, диаметром 13 мм, имеющей в свободном состоянии длину 40 мм и выполненной из прутка, толщиной 3 мм и стального винта с головкой диаметром 18 мм поджима пружины к столу длиной 200 мм с резьбой М8х1,25 и бронзовой гайкой с резьбой М8х1,25, закрепленной на неподвижном основании. Единственное отличие механизма возврата подвижного стола по направлению X от механизма возврата подвижного стола по направлению Y состоит в способе крепления бронзовой гайки. Для направления X гайка закрепляется на неподвижном чугунном основании, а для направления Y гайка закрепляется на подвижном столе направления X. Червячные редукторы по направлениям X и Y имеют одинаковую конструкцию и состоят из коллекторного электрического двигателя ДПМ-30-Н1-01 с стальным червяком и капроновым червячным колесом. Частота колебаний стола может изменяться от нуля до 10 Гц величиной подаваемого на электродвигатель напряжения в диапазоне от 0 до 32 В. На торце выходного вала червячного редуктора посредством болтового соединения М6х1 закреплен однорядный шарикоподшипник с внутренним диаметром 6 мм и внешним 15 мм (например СХ 1000096 ZZ 619 6). Одновременная работа обоих механизмов возвратно-поступательного перемещения в направлениях X и Y позволяет возбуждать в исследуемом датчике колебания в обоих направлениях. Раздельная работа механизмов возвратно-поступательного перемещения по направлению X или Y позволяет возбуждать в исследуемом датчике колебания в одном направлении. При подаче различных напряжений на электродвигатели возможно одновременное возбуждение колебаний с различной частотой в исследуемом сейсмическом датчике по направлениям X и Y.
Использование двухкоординатного низкочастотного стенда для исследования и калибровки сейсмических датчиков позволит оптимизировать процедуру поверки, контроля работоспособности и калибровки сейсмических датчиков и, следовательно, повысить точность сейсморазведочных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2815852C1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| АВАРИЙНОЕ ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОЙ ТЕЛЕЖКИ | 2003 |
|
RU2234433C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2001 |
|
RU2186471C1 |
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| Вибровозбудитель | 1985 |
|
SU1279677A1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| Двухвальный горизонтальный смеситель с регулируемыми вертикальными лопатками | 2017 |
|
RU2646406C1 |

Изобретение относится к контрольно-измерительной технике и может быть использовано для калибровки сейсмических датчиков. Устройство включает подвижный стол, направляющие типа «ласточкин хвост», пружинные механизмы возврата подвижного стола для направления X и Y, состоящие из электрического двигателя, червячного редуктора и выходного вала, шарикового подшипника, установленного со смещением от оси вращения выходного вала. Технический результат - заявляемое устройство позволяет проводить испытания и калибровать сейсмические датчики с постоянной амплитудой колебаний в различном диапазоне частот. 1 ил.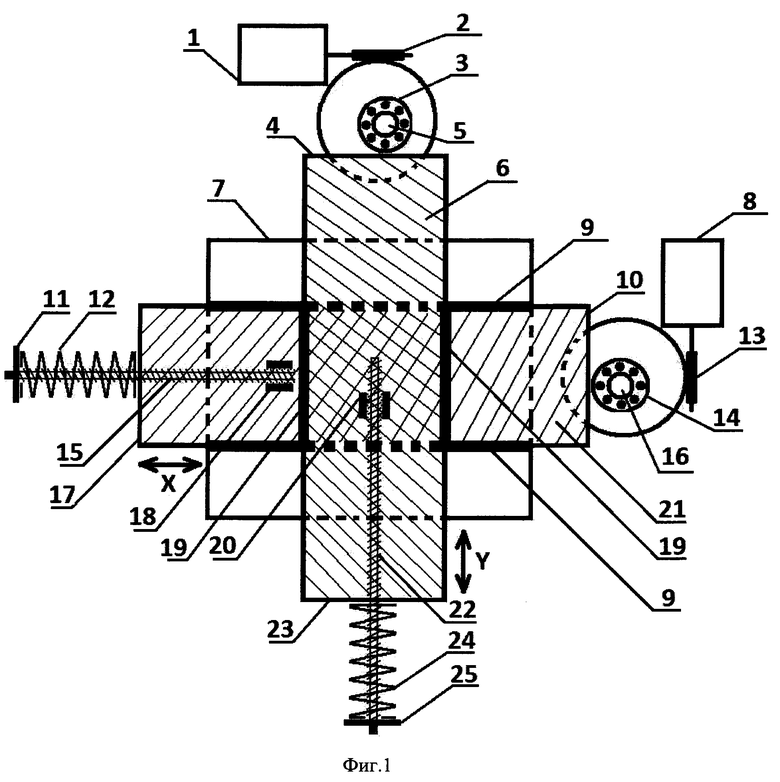
Двухкоординатный низкочастотный стенд для испытаний и калибровки сейсмических датчиков, включающий неподвижное основание стенда, на котором находится подвижный стол, способный двигаться возвратно-поступательно в направлении X относительно неподвижного основания посредством направляющих «ласточкин хвост», выходной вал червячного редуктора, на торце которого установлен шариковый подшипник со смещением от оси вращения вала, при этом выходной вал червячного редуктора связан с электродвигателем, величина напряжения которого определяет частоту возвратно-поступательных движений подвижного стола, а с торца подвижного стола установлен пружинный механизм, поджимающий подвижный стол к внешней обойме шарикового подшипника, при этом пружинный механизм состоит из спиральной пружины, одним концом опирающейся на торец подвижного стола, причем другой конец пружины поджимается винтом с головкой, проходящим сквозь пружину, с гайкой, закрепленной на неподвижном основании под подвижным столом.
| Способ исследования сейсмоприемников | 1985 |
|
SU1430922A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| Стенд для воспроизведения комбинированных испытательных воздействий | 1985 |
|
SU1287015A1 |
| Стенд для испытания изделий наВОздЕйСТВиЕ пОСТОяННыХ и НизКО-чАСТОТНыХ уСКОРЕНий | 1978 |
|
SU813155A1 |
| Пьезоэлектрический вибростенд | 1974 |
|
SU494640A1 |
| CN 0106248198 A, 21.12.2016. | |||

