Изобретение относится к землеройной технике, а именно к одноковшовым экскаваторам.
Цель изобретения повышение проходимости и устойчивое ги при работ е на осно- вании с недостаточной несущей способностью.
На фиг.1 изображена машина вид соо- ку; на фиг.2 - вид А на фиг 1, ни фиг 3 - схема расположения винтовы опор вид сбоку, на фиг.4 - винтовая опорп вид сбоку, на фиг и -механизм захи.-пэ переноса и ЗЛВИНЧИРЛ ния винтовых опор MC фиг ( pj.ipes S R на фиг.5.
Землеройная машина включает гусеничное опорноходовое оборудование 1, поворотную платформу 2, рабочее оборудование 3, основную 4 и дополнительную 5 кабины управления, силовой агрегат 6. На рзме 7 шарнирно расположены кассетники 8 с позиционной установкой для расположения глубинных опор 9 в виде винтовых свай (привод поворота и позиционного фиксирования кассетника не показан) Для захвата, переноса и завинчивания глубинных опор служит устройство 10, шар- нирно установленное на основной раме машины.
О 00
го
ю о
Глубинная (винтовая) опора 9 состоит из цилиндрического стержня 11 (фиг.4) с оголовком 12 прямоугольного сечения и опорной ленты 13, расположенной по винтовой линии.
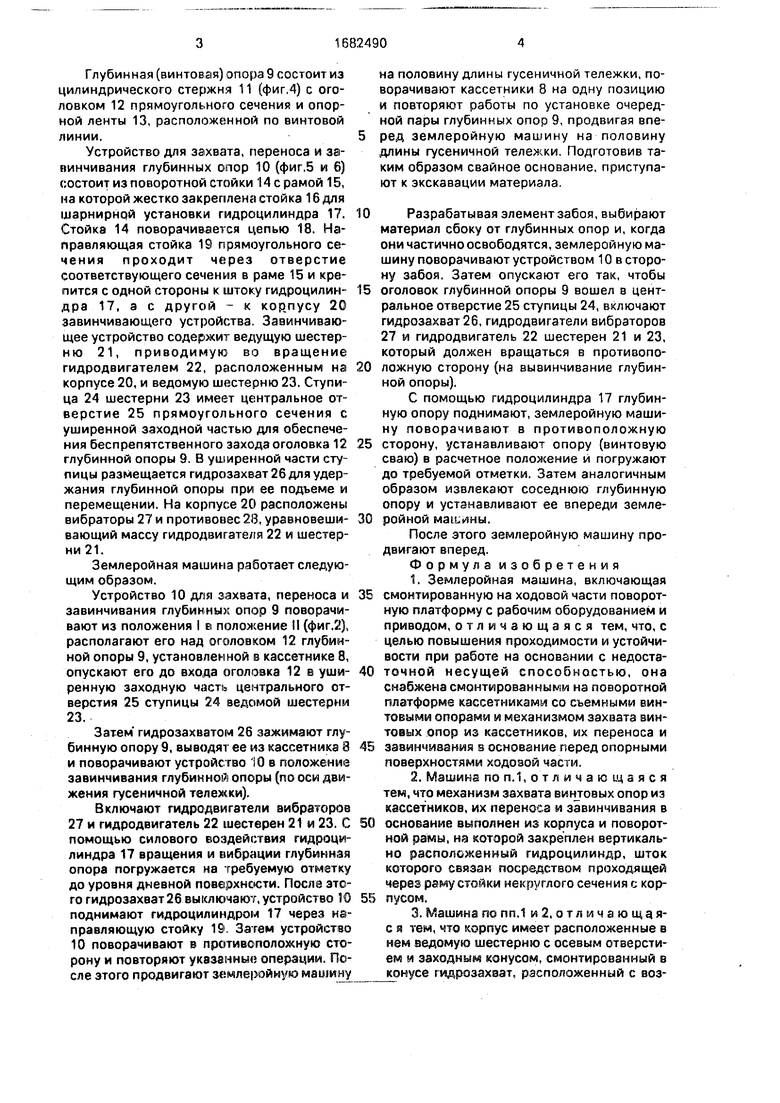
Устройство для захвата, переноса и завинчивания глубинных опор 10 (фиг.5 и 6) состоит из поворотной стойки 14с рамой 15, на которой жестко закреплена стойка 16 для шарнирной установки гидроцилиндра 17. Стойка 14 поворачивается цепью 18. Направляющая стойка 19 прямоугольного сечения проходит через отверстие соответствующего сечения в раме 15 и крепится с одной стороны к штоку гидроцилиндра 17, а с другой - к корпусу 20 завинчивающего устройства Завинчивающее устройство содержит ведущую шестер- ню 21, приводимую во вращение гидродвигателем 22, расположенным на корпусе 20, и ведомую шестерню 23. Ступица 24 шестерни 23 имеет центральное отверстие 25 прямоугольного сечения с уширенной заходной частью для обеспечения беспрепятственного захода оголовка 12 глубинной опоры 9. В уширенной части ступицы размещается гидрозахват 26 для удержания глубинной опоры при ее подъеме и перемещении. На корпусе 20 расположены вибраторы 27 и противовес 28, уравновешивающий массу гидродвигателя 22 и шестерни 21.
Землеройная машина работает следующим образом.
Устройство 10 для захвата, перекоса и завинчивания глубинных опор 9 поворачивают из положения I в положение II (фиг.2), располагают его над оголовком 12 глубинной опоры 9, установленной в кассетнике 8, опускают его до входа оголовка 12 в уширенную заходную часть центрального отверстия 25 ступицы 24 ведомой шестерни 23.
Затем гидрозахватом 26 зажимают глубинную опору 9, выводят ее из кассетника 3 и поворачивают устройство 10 в положение завинчивания глубинной опоры (по оси движения гусеничной тележки).
Включают гидродвигатели вибраторов 27 и гидродвигатель 22 шестерен 21 и 23. С помощью силового воздействия гидроцилиндра 17 вращения и вибрации глубинная опора погружается на требуемую отметку до уровня дневной поверхности. После этого гидрозахват 26 выключают, устройство Ш поднимают гидроцилиндром 17 через направляющую стойку 19 Затем устройство 10 поворачивают в противоположную сторону и повторяют указанные операции. После этого продвигают земле|юйную машину
на половину длины гусеничной тележки, поворачивают кассетники 8 на одну позицию и повторяют работы по установке очередной пары глубинных опор 9, продвигая впе- ред землеройную машину на половину длины гусеничной тележки. Подготовив таким образом свайное основание, приступают к экскавации материала.
0 Разрабатывая элемент забоя, выбирают материал сбоку от глубинных опор и, когда они частично освободятся, землеройную машину поворачивают устройством 10 в сторону забоя. Затем опускают его так, чтобы
5 оголовок глубинной опоры 9 вошел в центральное отверстие 25 ступицы 24, включают гидрозахват 26, гидродвигатели вибраторов 27 и гидродвигатель 22 шестерен 21 и 23, который должен вращаться в противопо0 ложную сторону (на вывинчивание глубинной опоры),
С помощью гидроцилиндра 17 глубинную опору поднимают, землеройную машину поворачивают в противоположную
5 сторону, устанавливают опору (винтовую сваю) в расчетное положение и погружают до требуемой отметки. Затем аналогичным образом извлекают соседнюю глубинную опору и устанавливают ее впереди земле0 ройной машины.
После этого землеройную машину продвигают вперед.
Формула изобретения
1.Землеройная машина, включающая 5 смонтированную на ходовой части поворотную платформу с рабочим оборудованием и приводом, отличающаяся тем, что, с целью повышения проходимости и устойчивости при работе на основании с недоста0 точной несущей способностью, она снабжена смонтированными на поворотной платформе кассетниками со съемными винтовыми опорами и механизмом захвата винтовых опор из кассетников, их переноса и
5 завинчивания в основание перед опорными поверхностями ходозой части.
2.Машина по п. 1,отличающаяся тем, что механизм захвата винтовых опор из кассетников, их перекоса и завинчивания в
0 основание выполнен из корпуса и поворотной рамы, на которой закреплен вертикально расположенный гидроцилиндр, шток которого связан посредством проходящей через раму стойки некруглого сечения с кор5 лусом.
3.Машина по пп.1 и 2, отличающа,я- с я тем, что корпус имеет расположенные в нем ведомую шестерню с осевым отверстием м заходным конусом, смонтированный в конусе гидрозахват, расположенный с воз516824906
с возможностью фиксации оголовка винто- версивный привод, кинематически связан- вой опоры, и закрепленные на корпусе ре- ный с ведомой шестерней, и вибратор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор | 1989 |
|
SU1744199A1 |
| ПЛАВУЧЕЕ СРЕДСТВО ГУСЕНИЧНОГО ТИПА С ЗЕМЛЕРОЙНЫМ ОБОРУДОВАНИЕМ | 2016 |
|
RU2612548C1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2380487C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| АМФИБИЯ ГУСЕНИЧНОГО ТИПА С ЗЕМЛЕРОЙНЫМ ОБОРУДОВАНИЕМ | 1992 |
|
RU2085408C1 |
| Рабочее оборудование гидравлического экскаватора | 2019 |
|
RU2720039C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ БУЛЬДОЗЕРА | 2004 |
|
RU2305727C2 |
| МАШИНА ДЛЯ РАСКОЛА КАМНЯ | 1991 |
|
RU2014452C1 |
| Экскаватор | 1990 |
|
SU1735511A1 |


Изобретение относится к одноковшовым экскаваторам. Цель - повышение проходимости и устойчивости при работе на основании с недостаточной несущей способностью. Машина имеет смонтированные на поворотной платформе 2 кассетники со съемными винтовыми опорами (ВО) 9 Платформа 2 имеет механизм для захвата ВО 9 из кассетников, их переноса и завинчивания в основание перед опорными поверхностями ходовой части 1 экскаватора. Эгот механизм выполнен из поворотной рамы, на которой закреплен вертикально расположенный гмдроцилиндр 17. Шток гидроцилиндра 17 связан со стойкой 19 некруглого сечения, которая проходит через раму 15 и соединена с корпусом механизма 10, вращения ВО 9, Внутри корпуса расположена ведомая шестерня с осевым отверстием и заходным конусом, в котором смонтирован гидрозахват для фиксации оголовки ВО 9 При работе из кассетника ВО 9 вынимаются с помощью механизма 10 захвата, переносятся в зоны опорных поверхностей ходовой части 1 экскаватора и завинчиваются в основании до уровня дневной поверхности Экскаватор перемещается во ВО 9 и разрабатывает грунт. После частичного обнажения ВО 9 последние переставляются перед экскаватором, используя поворотную платформу с указанными механизмами 2 з п ф-лы, 6 ил.
17
дидА
8
Ю
Фиг. 2
ОПИТ}
W&&№
Nw
X i.jz±3
fe.5
20
27
27
$иг.В
| ОПОРНОЕ УСТРОЙСТВО к ЭКСКАВАТОРУ, КРАНУ И ПОДОБНЫМ МАШИНАМ | 0 |
|
SU293969A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Опорное устройство колесного экскаватора | 1983 |
|
SU1089213A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
