p/j /j/j /// /// ///////// ///у// ////////////л /#//////////;/
Фиг
Изобретение относится к землеройным машинам, а конкретнее к одноковшовым экскаваторам.
Известен экскаватор, включающий смонтированную на раме ходовой части поворотную платформу с рабочим оборудованием и противовесом, привод поворота противовеса и установленные между поворотной платформой и опорно-поворотным кругом датчики, соединенные с блоком управления, причем блок управления связан с приводом поворота противовеса.
Использование противовеса для уравновешивания большого опрокидывающего момента, возникающего при резании грунта рабочим оборудованием (в активную фазу рабочего цикла), обуславливает низкую устойчивость экскаватора в активной фазе рабочего цикла за счет неравномерности усилий резания по высоте забоя и инерци- альности привода поворота противовеса. Например, при резком снижении сопротивления резанию (в результате неопытности машиниста экскаватора, наличия неоднородного грунта, в конце процесса резания и т.д.) вследствие невозможности мгновенного перемещения противовеса в направлении к оси вращения поворотной платформы от противовеса возникает опрокидывающий момент, который может вызвать потерю устойчивости экскаватора. Аналогичное происходит при резком увеличении сопротивления резанию. Возникновение опрокидывающих моментов, в свою очередь, приводит к перекосу опорно-поворотного круга, что определяет возможность его заклинивания и преждевременного износа.
Наиболее близким техническим решением к предлагаемому является экскаватор, включающий смонтированную на раме ходовой части поворотную платформу с рабочим оборудованием и противовесом и винтовые опоры с механизмами их завинчивания, монтированные на поворотной платформе с противоположной от рабочего оборудования стороны.
Компенсация опрокидывающих моментов большой величины, действующих в активную фазу рабочего цикла экскаватора (при копании) за счет заглубления в грунт винтовых опор, позволяет повысить устойчивость экскаватора. Однако при этом вследствие появления в каждом из циклов дополнительных операций завинчивания и выемки из грунта винтовых опор до и после копания происходит увеличение времени рабочего цикла, определяющее снижение производительности экскаватора.
Цель изобретения - повышение производительности экскаватора за счет сокращения времени заглубления винтовых опор.
Поставленная цель достигается тем, что в известном экскаваторе, включающем
смонтированную на раме ходовой части поворотную платформу с рабочим оборудованием и винтовые опоры с механизмом их завинчивания, рама ходовой части имеет дополнительную соосно расположенную в го0 ризонтальной плоскости раму с направляющей, к которой закреплены винтовые опоры, а поворотная платформа с противоположной от рабочего оборудования стороны имеет опорные элементы, рас5 положенныесвозможностью
взаимодействия с направляющей, при этом последняя выполнена по дуге окружности с центром на оси поворота платформы, а опорные элементы выполнены в виде роли0 ков с осями, расположенными по радиусам дуги окружности направляющей. Направляющая выполнена в виде швеллера, полки которого на концах имеют отогнутые наружу окрылки.
5Снабжение рамы ходовой части экскаватора дополнительной соосно располо- . женной в горизонтальной плоскости рамой с направляющей, к которой закреплены винтовые опоры, а поворотной платформы с
0 противоположной от рабочего оборудования стороны - опорными элементами, рас- положенными с возможностью взаимодействия с направляющей, позволяет заглубление винтовых опор осуществлять
5 только один раз на каждой из стоянок экскаватора (т.е. один раз на большое количество циклов), что обуславливает повышение производительности экскаватора за счет сокращения среднего времени рабочего цик0 ла. Для обеспечения взаимодействия опорных элементов с направляющей, т.е. работоспособности экскаватора, направляющая выполнена по дуге окружности с центром на оси поворота платформы, а опорные
5 элементы - в виде роликов с осями, расположенными по радиусам дуги окружности направляющей. Выполнение направляющей в виде швеллера позволяет ограничить свободный ход роликов по вертикали в пре0 делах полок швеллера, что снижает динамические нагрузки, передаваемые на направляющую при резком изменении опрокидывающих моментов. Снабжение же полок швеллера на концах отогнутыми нару5 жу окрылками повышает надежность попадания роликов между полками швеллера.
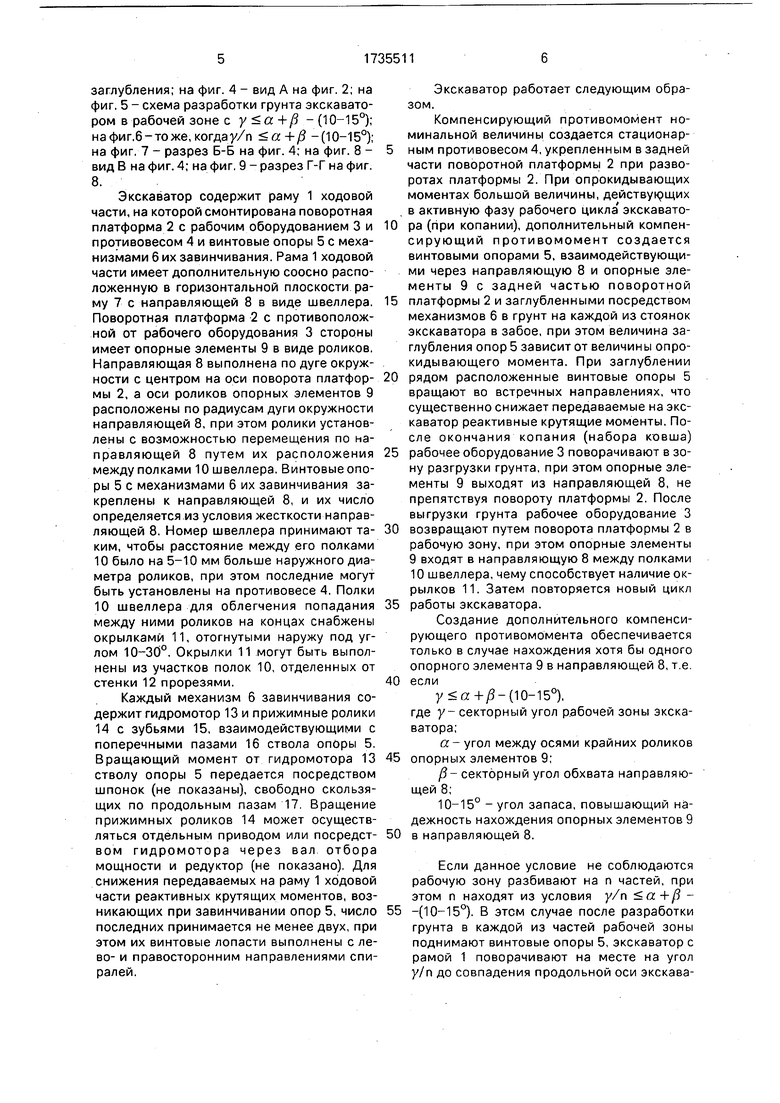
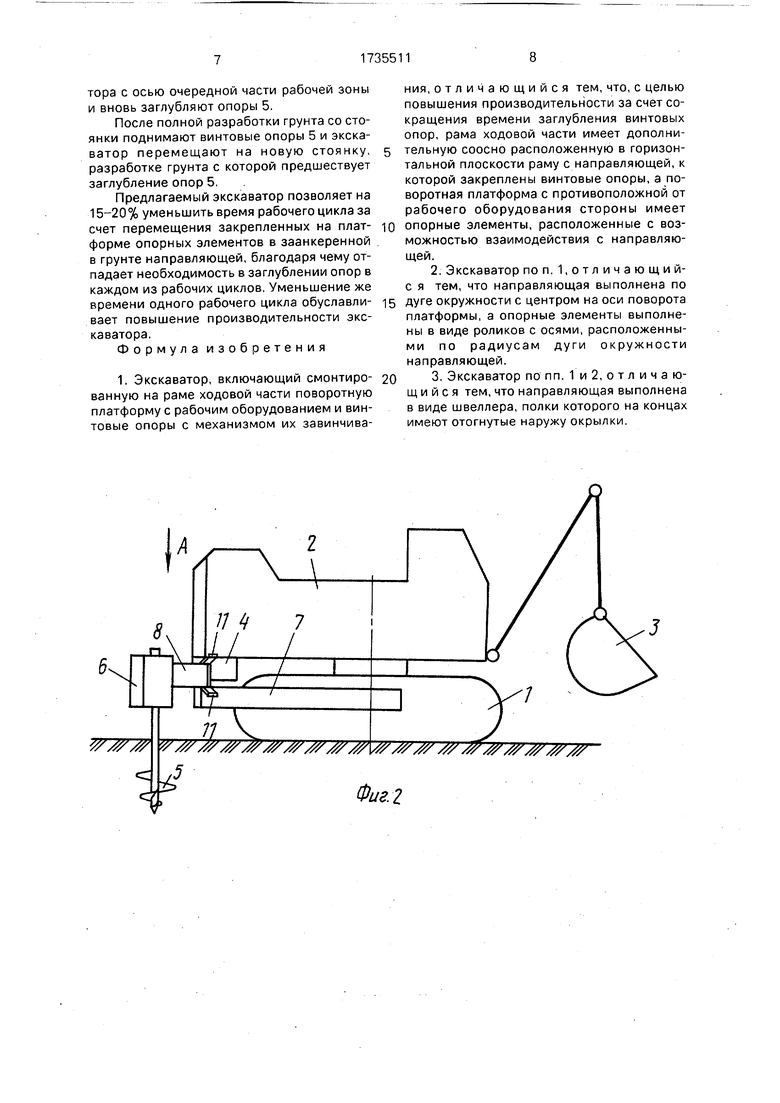
На фиг. 1 изображен экскаватор с поднятыми винтовыми опорами; на фиг. 2 - то же, с заглубленными винтовыми опорами; на фиг. 3 - винтовая опора с механизмом ее
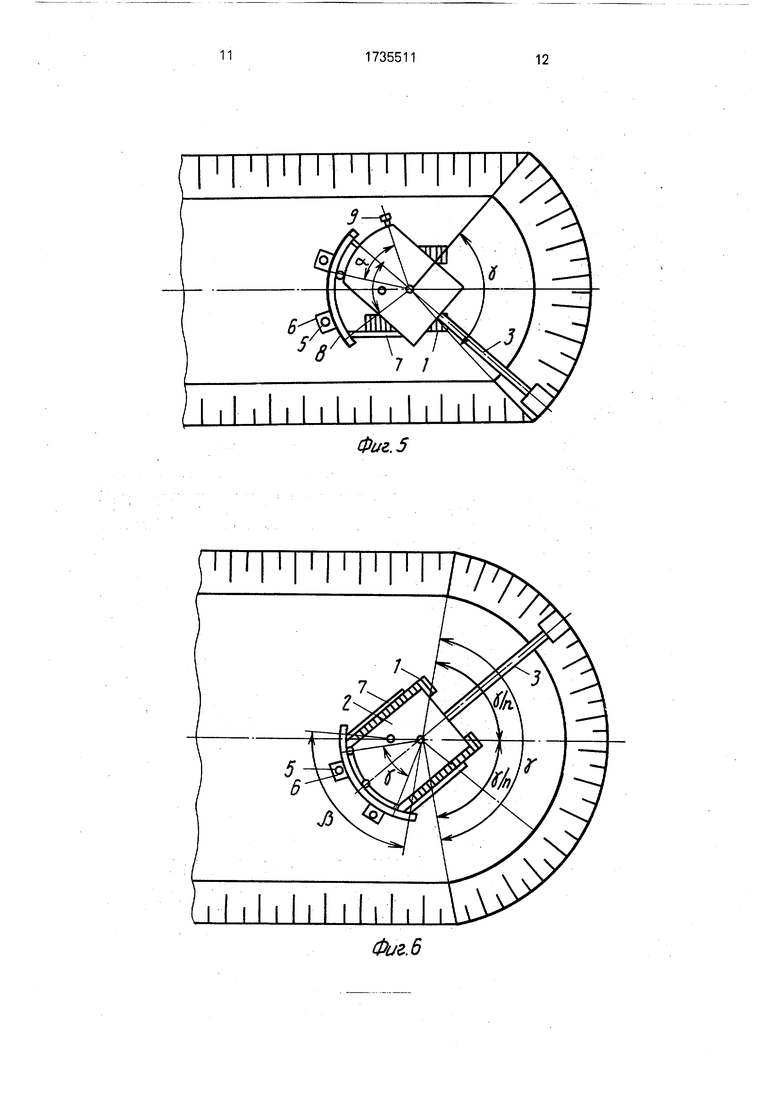
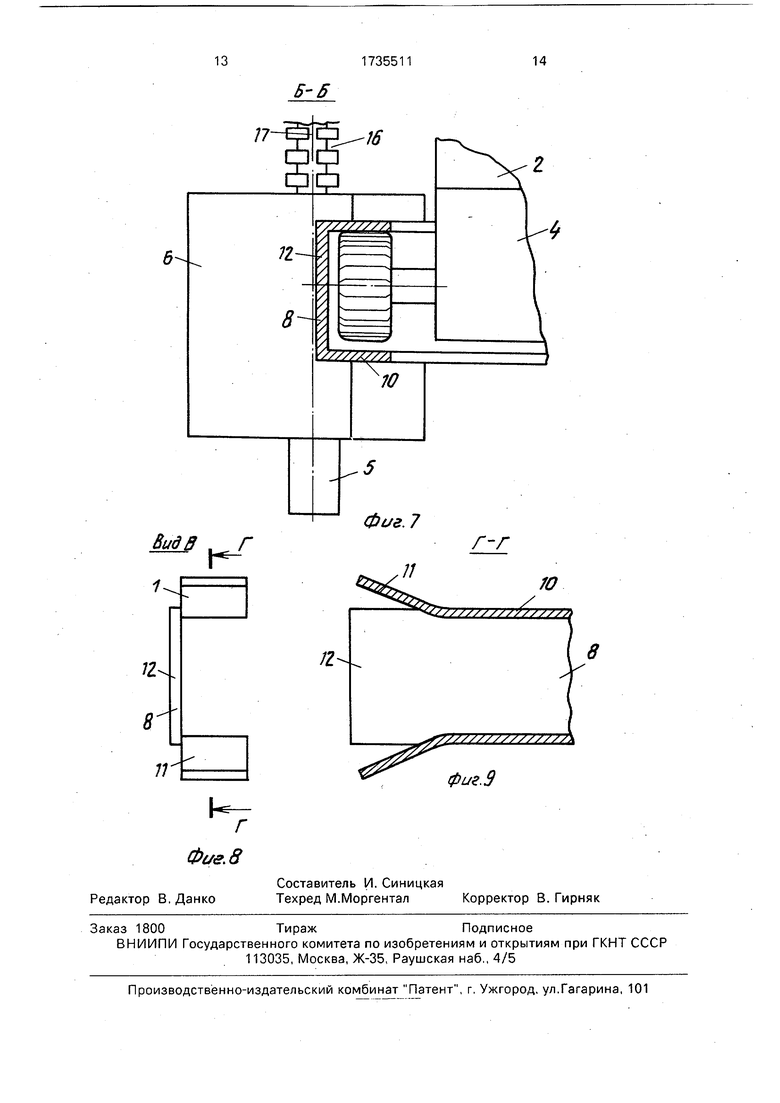
заглубления; на фиг. 4 - вид А на фиг. 2; на фиг. 5 - схема разработки грунта экскаватором в рабочей зоне с у а +/ - (10-15°); нафиг.б-тоже, когдау/n а+($ -(10-15°); на фиг. 7 - разрез Б-Б на фиг. 4; на фиг. 8 - вид В на фиг. 4; на фиг. 9 - разрез Г-Г на фиг. 8.
Экскаватор содержит раму 1 ходовой части, на которой смонтирована поворотная платформа 2 с рабочим оборудованием 3 и противовесом 4 и винтовые опоры 5 с механизмами 6 их завинчивания. Рама 1 ходовой части имеет дополнительную соосно расположенную в горизонтальной плоскости раму 7 с направляющей 8 в виде швеллера. Поворотная платформа 2 с противоположной от рабочего оборудования 3 стороны имеет опорные элементы 9 в виде роликов, Направляющая 8 выполнена по дуге окружности с центром на оси поворота платформы 2, а оси роликов опорных элементов 9 расположены по радиусам дуги окружности направляющей 8, при этом ролики установлены с возможностью перемещения по направляющей 8 путем их расположения между полками 10 швеллера. Винтовые опоры 5 с механизмами 6 их завинчивания закреплены к направляющей 8, и их число определяется из условия жесткости направляющей 8. Номер швеллера принимают таким, чтобы расстояние между его полками 10 было на 5-10 мм больше наружного диаметра роликов, при этом последние могут быть установлены на противовесе 4. Полки 10 швеллера для облегчения попадания между ними роликов на концах снабжены окрылкамй 11, отогнутыми наружу под углом 10-30°. Окрылки 11 могут быть выполнены из участков полок 10, отделенных от стенки 12 прорезями.
Каждый механизм 6 завинчивания содержит гидромотор 13 и прижимные ролики 14 с зубьями 15, взаимодействующими с поперечными пазами 16 ствола опоры 5. Вращающий момент от гидромотора 13 стволу опоры 5 передается посредством шпонок (не показаны), свободно скользящих по продольным пазам 17 Вращение прижимных роликов 14 может осуществляться отдельным приводом или посредством гидромотора через вал отбора мощности и редуктор (не показано). Для снижения передаваемых на раму 1 ходовой части реактивных крутящих моментов, возникающих при завинчивании опор 5, число последних принимается не менее двух, при этом их винтовые лопасти выполнены с лево- и правосторонним направлениями спиралей.
Экскаватор работает следующим образом.
Компенсирующий противомомент номинальной величины создается стационарным противовесом 4, укрепленным в задней части поворотной платформы 2 при разворотах платформы 2. При опрокидывающих моментах большой величины, действующих в активную фазу рабочего цикла экскаватора (при копании), дополнительный компенсирующий противомомент создается винтовыми опорами 5, взаимодействующими через направляющую 8 и опорные элементы 9 с задней частью поворотной
платформы 2 и заглубленными посредством механизмов 6 в грунт на каждой из стоянок экскаватора в забое, при этом величина заглубления опор 5 зависит от величины опрокидывающего момента. При заглублении
рядом расположенные винтовые опоры 5 вращают во встречных направлениях, что существенно снижает передаваемые на экскаватор реактивные крутящие моменты. После окончания копания (набора ковша)
рабочее оборудование 3 поворачивают в зону разгрузки грунта, при этом опорные элементы 9 выходят из направляющей 8, не препятствуя повороту платформы 2. После выгрузки грунта рабочее оборудование 3
возвращают путем поворота платформы 2 в рабочую зону, при этом опорные элементы
9входят в направляющую 8 между полками
10швеллера, чему способствует наличие ок- рылков 11. Затем повторяется новый цикл
работы экскаватора.
Создание дополнительного компенсирующего противомомента обеспечивается только в случае нахождения хотя бы одного опорного элемента 9 в направляющей 8, т е если
у (10-15°),
где у- секторный угол рабочей зоны экскаватора;
а- угол между осями крайних роликов опорных элементов 9;
секторный угол обхвата направляющей 8;
10-15° -угол запаса, повышающий надежность нахождения опорных элементов 9 в направляющей 8.
Если данное условие не соблюдаются рабочую зону разбивают на п частей, при этом п находят из условия у/п «+/ - -(10-15°). В этом случае после разработки грунта в каждой из частей рабочей зоны поднимают винтовые опоры 5, экскаватор с рамой 1 поворачивают на месте на угол у/п до совпадения продольной оси экскаватора с осью очередной части рабочей зоны и вновь заглубляют опоры 5.
После полной разработки грунта со стоянки поднимают винтовые опоры 5 и экскаватор перемещают на новую стоянку, разработке грунта с которой предшествует заглубление опор 5,
Предлагаемый экскаватор позволяет на 15-20% уменьшить время рабочего цикла за счет перемещения закрепленных на платформе опорных элементов в заанкеренной в грунте направляющей, благодаря чему отпадает необходимость в заглублении опор в каждом из рабочих циклов, Уменьшение же времени одного рабочего цикла обуславливает повышение производительности экскаватора.
Формула изобретения
1. Экскаватор, включающий смонтированную на раме ходовой части поворотную платформу с рабочим оборудованием и винтовые опоры с механизмом их завинчивания, отличающийся тем, что, с целью повышения производительности за счет сокращения времени заглубления винтовых опор, рама ходовой части имеет дополнительную соосно расположенную в горизонтальной плоскости раму с направляющей, к которой закреплены винтовые опоры, а поворотная платформа с противоположной от рабочего оборудования стороны имеет
опорные элементы, расположенные с возможностью взаимодействия с направляющей.
2. Экскаватор поп. 1,отличающий- с я тем, что направляющая выполнена по
дуге окружности с центром на оси поворота платформы, а опорные элементы выполнены в виде роликов с осями, расположенными по радиусам дуги окружности направляющей.
3. Экскаватор по пп. 1 и 2, о т л и ч а ю- щ и и с я тем, что направляющая выполнена в виде швеллера, полки которого на концах имеют отогнутые наружу окрылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор | 1986 |
|
SU1411398A1 |
| Экскаватор | 1990 |
|
SU1751277A1 |
| Землеройная машина | 1989 |
|
SU1682490A1 |
| Гидравлический экскаватор | 1979 |
|
SU848534A1 |
| Экскаватор | 1989 |
|
SU1684437A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1991 |
|
RU2018585C1 |
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
Изобретение касается землеройных машин. Экскаватор содержит раму ходовой части 1, на которой смонтирована поворотная платформа 2 с рабочим оборудованием 3 и противовесом 4 и винтовые опоры 5 с механизмами их завинчивания 6. Рама 1 имеет дополнительную раму 7 с направляющей 8 в виде швеллера с полками. Платформа 2 с противоположной от рабочего оборудования 3 стороны имеет опорные элементы в виде роликов. Направляющая 8 выполнена по дуге окружности с центром на оси поворота платформы 2, а оси роликов опорных элементов расположены по радиусам дуги окружности направляющей 8, при этом ролики расположены с возможностью перемещения по направляющей 8 между полками швеллера. Винтовые опоры 5 с механизмами 6 закреплены на направляющей 8. При опрокидывающих моментах большой величины (при копании) дополнительный компенсирующий противомомент создают винтовые опоры 5, взаимодействующие через направляющую 8 и опорные элементы с задней частью платформы 2, заглубленные посредством механизмов 6 в грунт на каждой из стоянок экскаватора в забое. При повороте платформы 2 для выгрузки грунта опорные элементы 9 перемещаются по направляющей 8 между полками швеллера, не препятствуя повороту и передавая на направляющую и далее на винтовые опоры усилия опрокидывающего момента По окончании копания сданной стоянки поднимают винтовые опоры 5, и экскаватор перемещают на новую стоянку, разработке грунта с которой предшествует заглубление опор 5 2 з.п ф-лы, 9 ил. fe XI СА) СП СЛ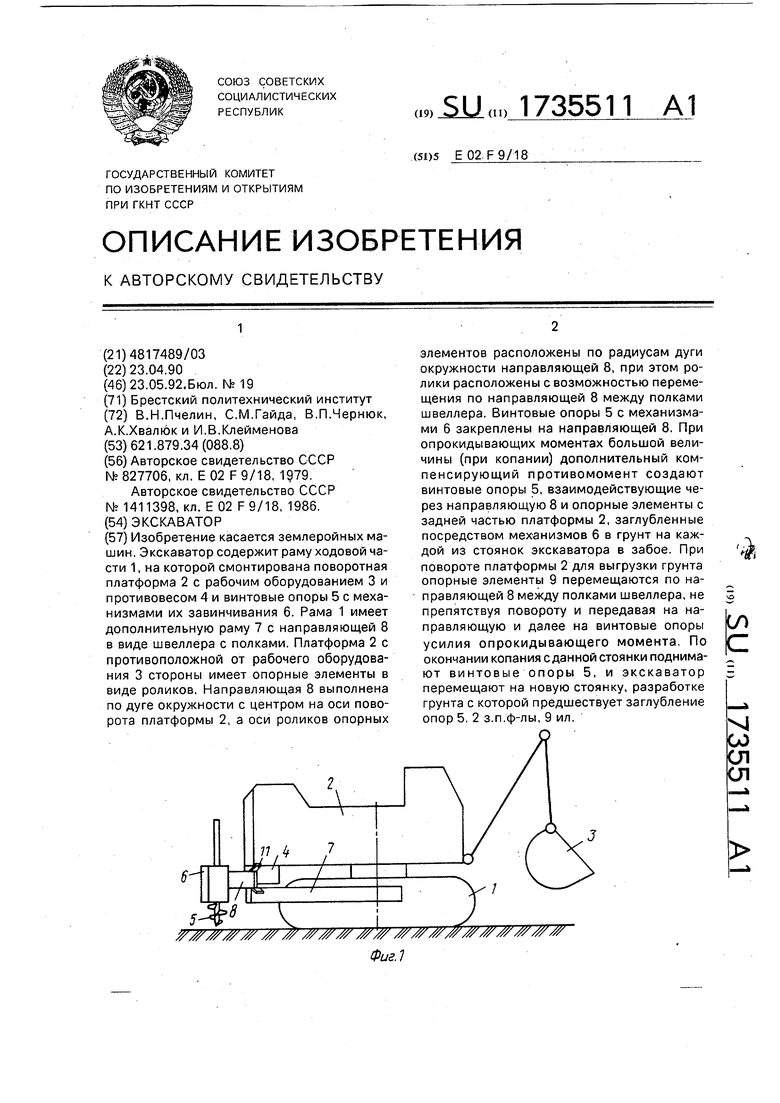
-V
114 ; 1//
r/ ///// / /r/f/J/W/ r/y/ J7 JrjrJrjr/Г// 7
Фиг. 1
/J
Фиг. 4
/ I I I I I I I I I I I I I I I I i I
Фиг. 5
Фиг. 6
&
кir
8
фиг.9
| Устройство для уравновешиваниязЕМлЕРОйНОй МАшиНы | 1979 |
|
SU827706A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
