фиг1
ломков содержит повязку 1 с карманом 2 и упругой прокладкой в нем 3, поперечные направляющие 4 со стержнем 5. оснащенным опорной площадкой 6, и датчик 8 перемещений, закрепленный на повязке 1 и кинематически связанный своими контактами 9 CQ стержнем 5. Внеочаговый чрескост- ный аппарат содержит внешнюю опору в виде прутка и трубки на нем, закрепленных на внешней опоре с помощью зажимов резьбовых стержней и направляющей втулки
со стержнем с опорной площадкой, кинематически связанным с датчиком перемещений, закрепленным на внешней опоре. Датчик осевой нагрузки на нижнюю конечность состоит из пластин, между которыми размещены тарированные пружины, упругие рычаги, регулировочные винты и микропереключатели, включенные в схему двухчасготного акустического сигнализатора. 4 с.п. ф-лы, 13 ил.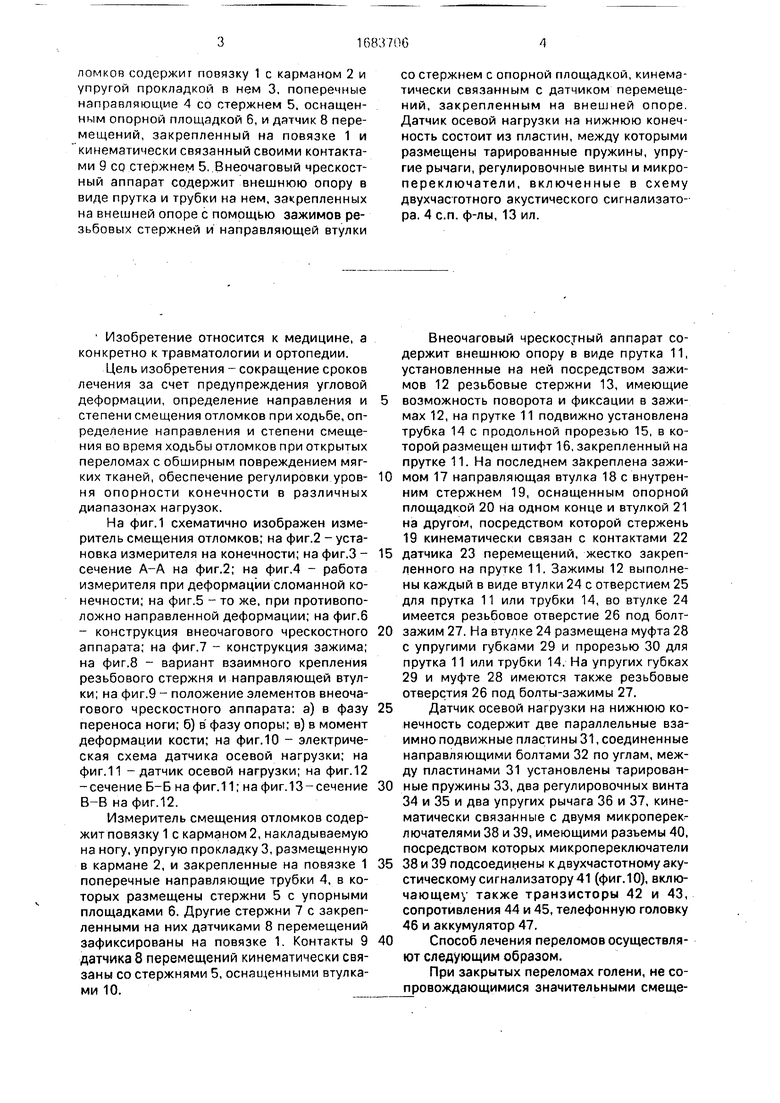
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕЛОМА ДЛИННОЙ ТРУБЧАТОЙ КОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2010556C1 |
| УСТРОЙСТВО ДЛЯ РЕПОЗИЦИИ КОСТНЫХ ОТЛОМКОВ В АППАРАТЕ ИЛИЗАРОВА | 2013 |
|
RU2572302C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО ОСТЕОСИНТЕЗА | 2006 |
|
RU2310413C1 |
| УСТРОЙСТВО ДЛЯ АКТИВАЦИИ ОСТЕОГЕНЕЗА АСИММЕТРИЧНОЙ ДИНАМИЧЕСКОЙ КОМПРЕССИЕЙ | 2001 |
|
RU2240065C2 |
| УСТРОЙСТВО ДЛЯ ВНЕОЧАГОВОГО ОСТЕОСИНТЕЗА ОТКРЫТЫХ ПЕРЕЛОМОВ ГОЛЕНИ | 2014 |
|
RU2572300C1 |
| АППАРАТ ДЛЯ ЛЕЧЕНИЯ ПЕРЕЛОМОВ ПЯТОЧНОЙ КОСТИ | 1999 |
|
RU2200496C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ПЕРЕЛОМОВ И ПЕРЕМЕЩЕНИЯ ПЛОСКИХ КОСТЕЙ (ВАРИАНТЫ) | 2013 |
|
RU2519632C1 |
| СПИЦЕСТЕРЖНЕВОЙ АППАРАТ ФУРДЮКА ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА | 1996 |
|
RU2125418C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕЛОМОВ КОСТЕЙ ГОЛЕНИ | 2006 |
|
RU2302835C1 |
| Способ наложения аппарата внешней фиксации при лечении диафизарных переломов костей голени | 2022 |
|
RU2791267C1 |
Изобретение относится к медицине, а именно к травматологии и ортопедии Цель - сокращение сроков лечения за счет предупреждения угловой деформации, определение направления и степени смещения отломков при ходьбе, определение направления и степени смещения во время ходьбы отломков при открытых переломах с обширным повреждением мягких тканей, обеспечение регулировки уровня спорности конечности в различных диапазонах нагрузок. Определяют величину осевой нагрузки на конечность, при которой появляется деформация, и в соответствии с этим дозируют опорную нагрузку, не превышая допустимый ее уровень. Измеритель смещения отЈ О со Сл VI О о
Изобретение относится к медицине, а конкретно к травматологии и ортопедии.
Цель изобретения - сокращение сроков лечения за счет предупреждения угловой деформации, определение направления и степени смещения отломков при ходьбе, определение направления и степени смещения во время ходьбы отломков при открытых переломах с обширным повреждением мягких тканей, обеспечение регулировки уровня спорности конечности в различных диапазонах нагрузок.
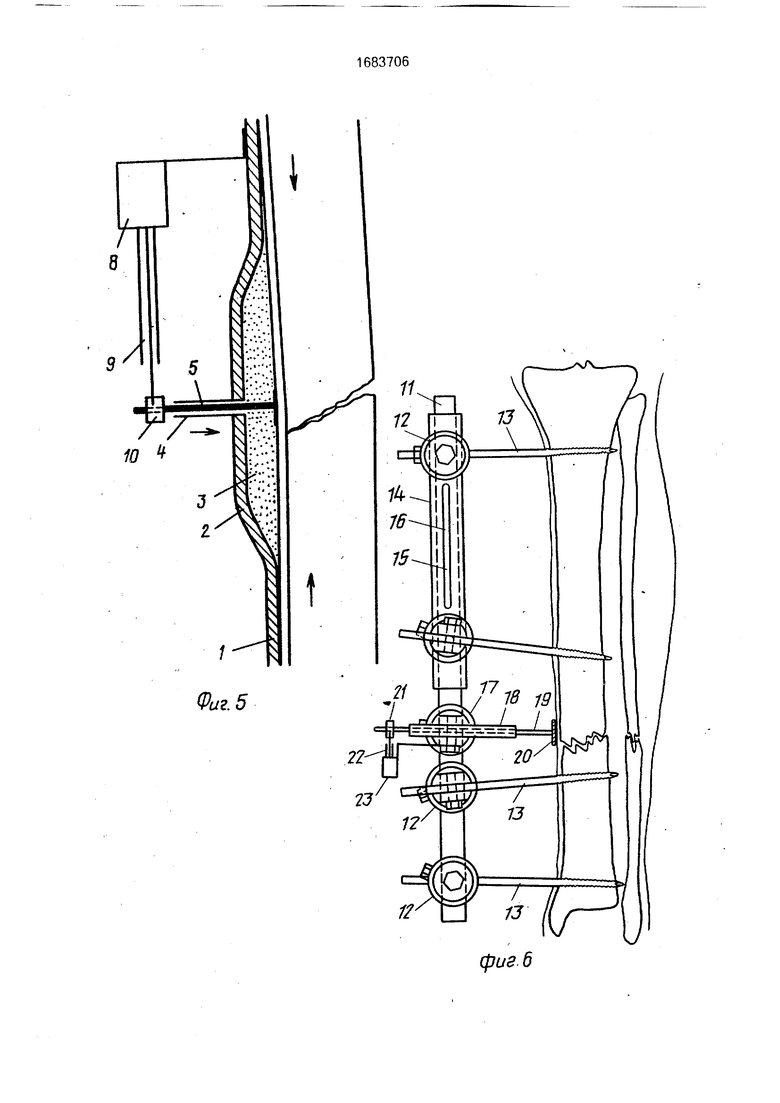
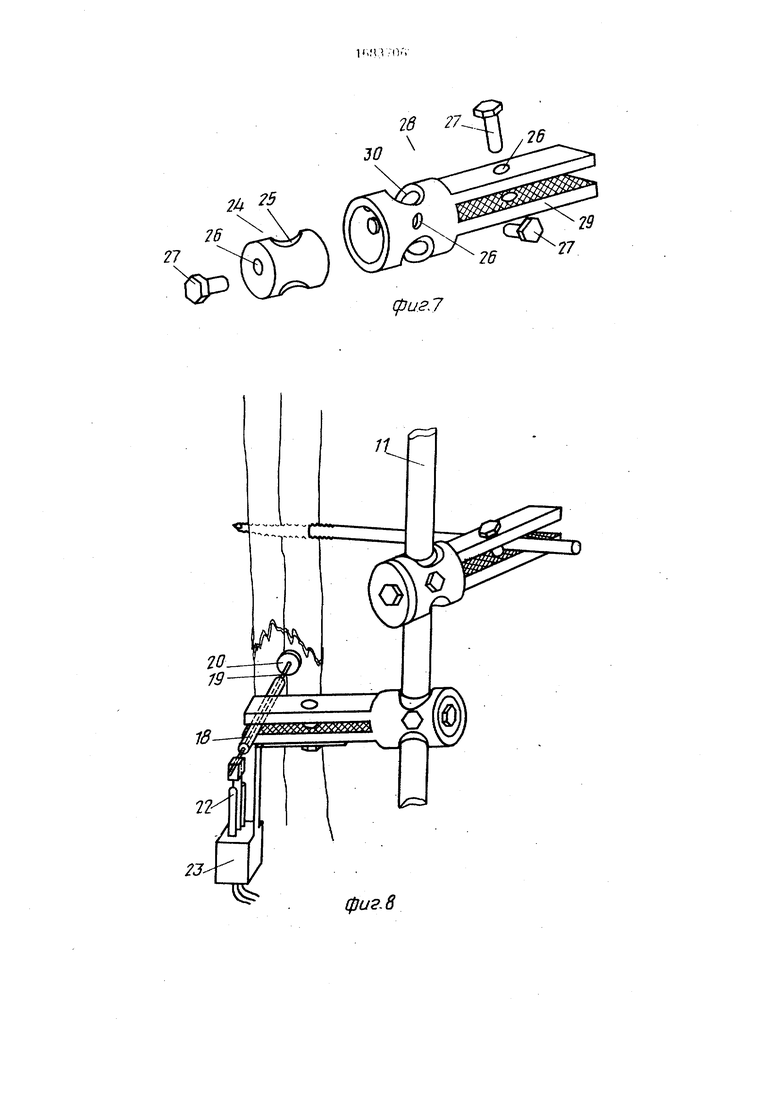
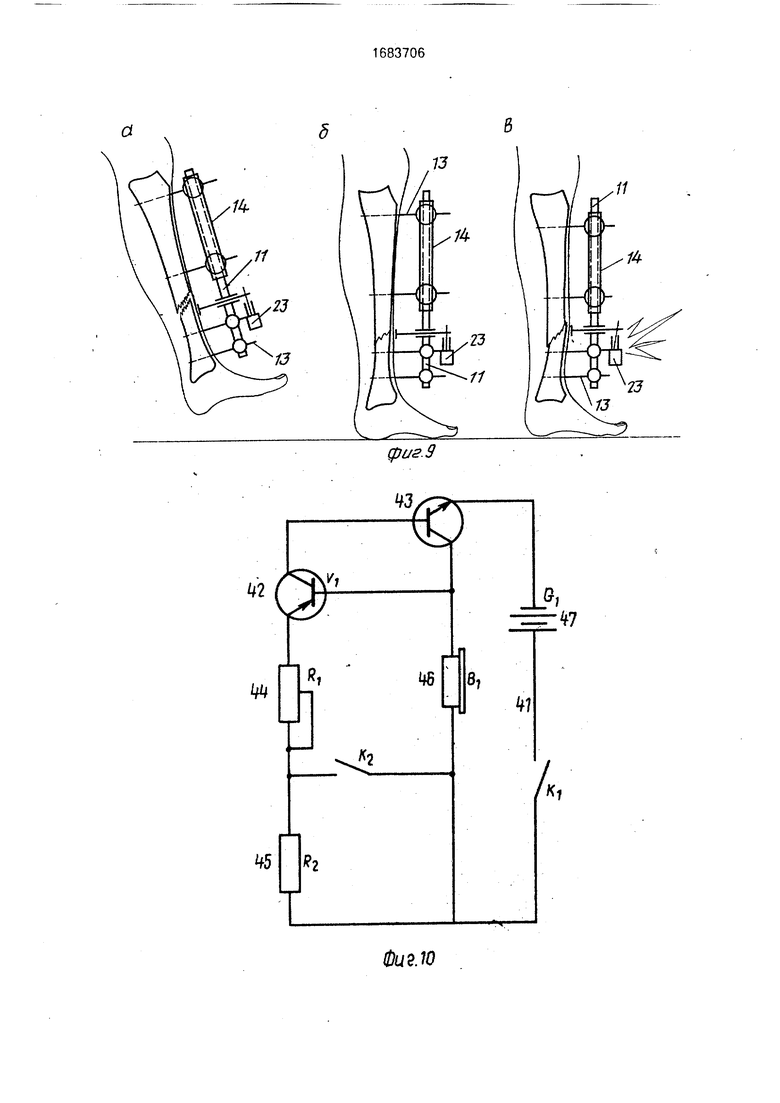
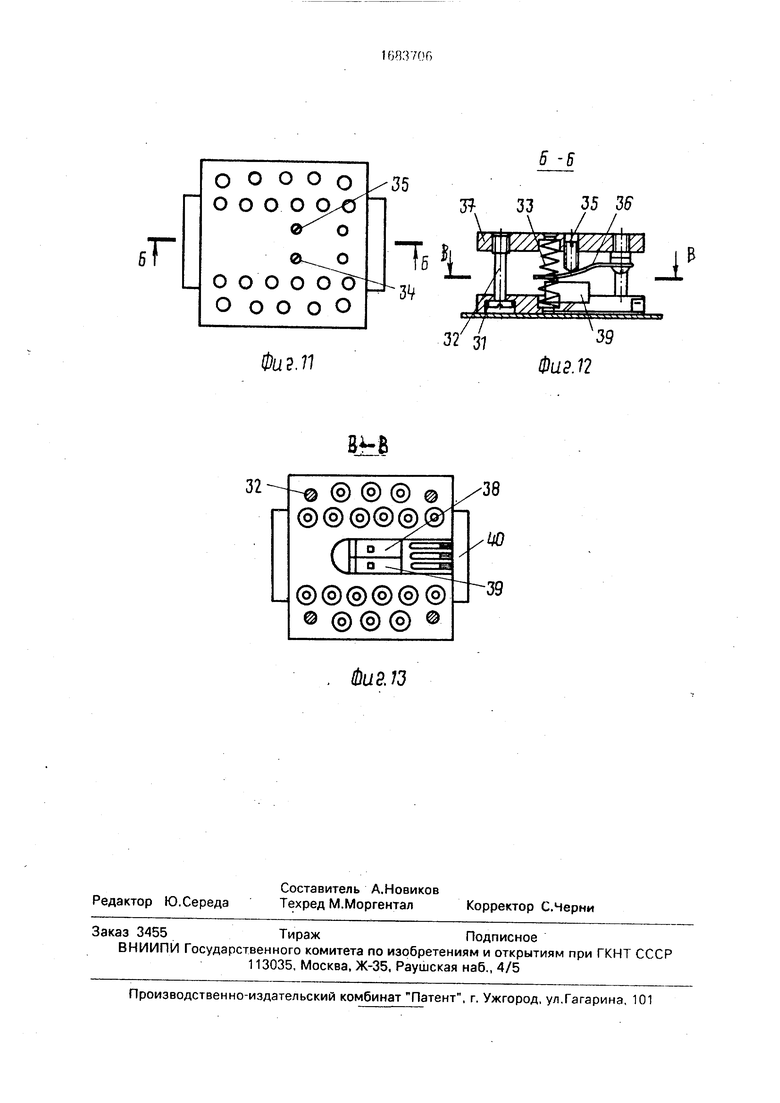
На фиг.1 схематично изображен измеритель смещения отломков; на фиг.2 - установка измерителя на конечности; на фиг.З - сечение А-А на фиг.2; на фиг.4 - работа измерителя при деформации сломанной конечности; на фиг.5 -то же, при противоположно направленной деформации; на фиг.6 - конструкция внеочагового чрескостного аппарата; на фиг.7 - конструкция зажима; на фиг.З - вариант взаимного крепления резьбового стержня и направляющей втулки; на фиг.9 - положение элементов внеочагового чрескостного аппарата: а) в фазу переноса ноги; б) в фазу опоры: в) в момент деформации кости; на фиг. 10 - электрическая схема датчика осевой нагрузки; на фиг.11 - датчик осевой нагрузки; на фиг.12 -сечение Б-Б на фиг.11; на фиг.13-сечение В-В на фиг.12.
Измеритель смещения отломков содержит повязку 1 с карманом 2, накладываемую на ногу, упругую прокладку 3, размещенную в кармане 2, и закрепленные на повязке 1 поперечные направляющие трубки 4, в которых размещены стержни 5 с упорными площадками 6. Другие стержни 7 с закрепленными на них датчиками 8 перемещений зафиксированы на повязке 1. Контакты 9 датчика 8 перемещений кинематически связаны со стержнями 5, оснащенными втулками 10.
Внеочаговый чрескостный аппарат содержит внешнюю опору в виде прутка 11, установленные на ней посредством зажимов 12 резьбовые стержни 13, имеющие
возможность поворота и фиксации в зажимах 12, на прутке 11 подвижно установлена трубка 14 с продольной прорезью 15, в которой размещен штифт 16, закрепленный на прутке 11. На последнем закреплена зажимом 17 направляющая втулка 18 с внутренним стержнем 19, оснащенным опорной площадкой 20 на одном конце и втулкой 21 на другом, посредством которой стержень 19 кинематически связан с контактами 22
датчика 23 перемещений, жестко закрепленного на прутке 11. Зажимы 12 выполнены каждый в виде втулки 24 с отверстием 25 для прутка 11 или трубки 14, во втулке 24 имеется резьбовое отверстие 26 под болтзажим 27. На втулке 24 размещена муфта 28 с упругими губками 29 и прорезью 30 для прутка 11 или трубки 14. На упругих губках 29 и муфте 28 имеются также резьбовые отверстия 26 под болты-зажимы 27.
Датчик осевой нагрузки на нижнюю конечность содержит две параллельные взаимно подвижные пластины 31, соединенные направляющими болтами 32 по углам, между пластинами 31 установлены тарированные пружины 33, два регулировочных винта 34 и 35 и два упругих рычага 36 и 37, кинематически связанные с двумя микропереключателями 38 и 39, имеющими разъемы 40, посредством которых микропереключатели
38 и 39 подсоединены к двухчастотному акустическому сигнализатору 41 (фиг.10), включающему также транзисторы 42 и 43, сопротивления 44 и 45, телефонную головку 46 и аккумулятор 47.
Способ лечения переломов осуществляют следующим образом.
При закрытых переломах голени, не сопровождающимися значительными смещениями отломков, через 5-7 дней после травмы на конечность надевают хлопчатобумажный чулок и производят наложение указанной повязки 1. В проекции Перелома на передневнутреннюю поверхность голе- ни укладывают упругую прокладку 3, в которую введены два стержня 5 с упорными площадками 6, а на наружные концы стержней 5 надеты направляющие трубки 4. При этом обеспечивают прилегание упорной площадки 6 одного стержня 5 к переднему гребню большой берцовой кости, а упорной площадки 6 другого стержня 5 - к внутренней поверхности площадки большой берцовой кости. Поверх чулка накладывают функциональную гипсовую повязку 1 при этом турами прогипсованного бинта сжимают упругую прокладку 3, а направляющие трубки 4 вгипсовывают в стенку образовавшегося кармана 2. После высыхания повяз- ки 1 к ней вблизи выстоящего конца стержня 7 фиксируют датчик 8 перемещений, средняя контактная пластина (не показано) которого связывается с выстоящим стержнем 5 с помощью втулки 10. Переме- щением последней устанавливают среднюю пластинку контакта так, чтобы она находилась посредине между двумя контактами 9. Угловое перемещение концов отлом- ков обусловит появление деформации на уровне перелома. Датчик 8 перемещений может иметь звуковой или световой сигнал.
Больной устанавливает.стопу на напольные весы и осуществляет осевую на- грузку поврежденной конечности в повязке 1 до появления сигнала, свидетельствующего о появлении деформации сломанного сегмента. В момент появления сигнала регистрируют показание весов. Определение уровня критической нагрузки проделывают несколько раз для получения достоверной ее величины. Затем датчик 8 перемещений подсоединяют к другому стержню 5 для определения нагрузки в дру- гой плоскости.
По минимальной величине опоры, при которой появлялась деформация конечности на уровне перелома, устанавливают си- лу включения датчика осевой нагрузки на конечность и фиксируют его на подошвенной поверхности обуви, или повязки 1. Больного обучают ходьбе с помощью костылей с нагрузкой на поврежденную конечность до появления первого сигнала. В течение первого месяца еженедельно определяют допустимый уровень нагрузки и соответственно его дозируют. В последующем определение допустимой нагрузки проводят не реже 1-2
раза в месяц до исчезновения симптома деформирования.
Повязка 1 позволяет контролировать поведение отломков при различных движениях и положениях конечности, которые сопровождаются действием изгибающей силы на поврежденный сегмент.
При открытых переломах, а также переломах, сопровождающихся значительным смещением отломков и обширным повреждением мягких тканей, фиксацию поврежденного сегмента осуществляют вне- очаговым чрескостным аппаратом.
В каждый из отломков, отступая 6-7 см от места перелома, чрескожно ввинчивают по одному резьбовому стержню 13. Затем в положении вертикального виса голени производят сопоставление отломков и фиксируют их путем крепления выстоящих резьбовых стержней 13 к внешней опоре с помощью зажимов 12. После рентгеноконтроля ввинчивают еще по одному резьбовому стержню 13 в проксимальный и дистальный отделы сегмента и также связывают их с внешней опорой. Одна пара резьбовых стержней 13 таким образом фиксирована к подвижной части внешней опоры, что позволяет при ходьбе реализовываться перемежающимся нагрузкам в месте контакта отломков.
В проекции перелома к внешней опоре с помощью аналогичного зажима 17 фиксируют направляющую трубку 18 со стержнем 19. Упорную площадку 20 на конце последнего приклеивают к коже клеолом, что позволяет следить за его перемещением как кпереди, так и кзади. На этом же зажиме 17 укрепляют датчик 23 перемещений. Средняя контактная пластинка (не показано) соединяется с наружным концом стержня 19.
На 3-5 сут больного обучают стоянию и ходьбе с помощью костылей. Допустимую нагрузку на конечность определяют указанным путем. Для регистрации деформации в другой плоскости осуществляют поворот датчика 23 перемещений на 80-90° на внешней опоре. Аналогично описанному дозируют усилие датчика осевой нагрузки на конечность.
В течение первых 2-3 мес. контроль допустимой нагрузки и ее дозировку проводят каждые 7-14 дней. При этом несущая способность поврежденного сегмента возрастает и соответственно увеличивают нагрузку на конечность до полной, после чего больной продолжает ходить в аппарате без дополнительных средств опоры. При наличии рентгенологических и клинических признаков сращения аппарат снимают.
Пример. Пострадавший Р. 25 лет, поступил в институт 22.04.87 по поводу за(nwroro винтообразного перелома голени в нижней трети с незначительным смещением отломков. На пятые сутки после травмы (27.04,87) наложена повязка 1 и больной обучен ходьбе на костылях с частичной опорой на поврежденную конечность. При этом выявлено, что при опоре на конечность с силой 11 кг появляется деформация на уровне перелома с углом, открытым кпереди. На подошвенную поверхность конечности установлен датчик осевой нагрузки на конечность с первым сигналом на 10 кг и вторым Сигналом на 10,3 кг. Больной начал ходить с опорой до появления первого сигнала, Выписан на амбулаторное лечение. Через 8 дней проведен повторный контроль допустимой опоры и выявлено, что деформирование наступает при нагрузке в 20 кг, в соответствии с ней установлены сигналы на датчике осевой нагрузки на нижнюю конечность: 19,5-19,8 кг.
Контрольный осмотр после прохождения одного месяца (21.05.87). Больной ходит с одним костылем, нагружая конечность. Определено, что деформирование наступает при осевой нагрузке в 66 кг. Повязка 1 частично разрушилась. Произведена ее замена. Разрешена ходьба с полной нагрузкой.
Контрольный осмотр через 2 мес. Ходит в повязке 1 с полной нагрузкой на конечность. Повязка 1 снята, проведено рентгенологическое исследование. Отмечено наличие выраженной периостальной мозоли. Рекомендовано приступить к работе через две недели.
Формула изобретения 1. Способ лечения переломов трубчатых костей путем иммобилизации и измерения смещения отломков при ходьбе, отличающийся тем, что, с целью сокращения сроков лечения за счет предупреждения угловой деформации, дозированно нагружают конечность по оси до появления угловой деформации.
упорными площадками и подвижно установлены в направляющих трубках, а другие закреплены на повязке.
внешнюю опору и установленные на ней с возможностью поворота и фиксации резьбовые стержни, отличающийся тем, что, с целью определения направления и степени смещения во время ходьбы отломков при открытых переломах с обширным повреждением мягких тканей, в него введены трубка, подвижно установленная на прутке, и закрепленные на нем направляющая втулка с подвижной стойкой, оснащенной упорной площадкой, и двухконтактный датчик перемещений, контакты которого кинематически связаны с концом подвижной стойки, причем резьбовые стержни попарно размещены на трубке и прутке,
пластинами тарированные пружины с регулировочными винтами и упругими рычагами, кинематически связанными с двумя микропереключателями, а двухчастотный акустический сигнализатор подключен к
микропереключателям,
ФигМ
Фаг. 5
физ 6
a
61
iZ 91
8 гпф
y&gbxsaosyaggffgyfflM
// /I о ////J
91
w
vu м;ч1
/4
//
f5
2
В
13
11
фиг. 9
&
W
В,
И
Л
/
ft
фцг.Ю
О О О О о О О О О Q, О
О О О О СГ(Г
о о о о о
Фиэ.11
, Фиг. 13
39
Фаг.п
| Устройство для определения перемещений костных отломков | 1976 |
|
SU649417A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Устройство для определения величины подвижности костных отломков | 1979 |
|
SU856449A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Патент США № 4502473, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Проспект фирмы GOTEP, ФРГ, 1986 | |||
| в | |||
