Изобретение относится к медицинской технике, а именно к устройствам для лече- ния пороков осанки.
Целью изобретения является обеспечение контроля за положением позвоночника путем электростимуляции мышц спины.
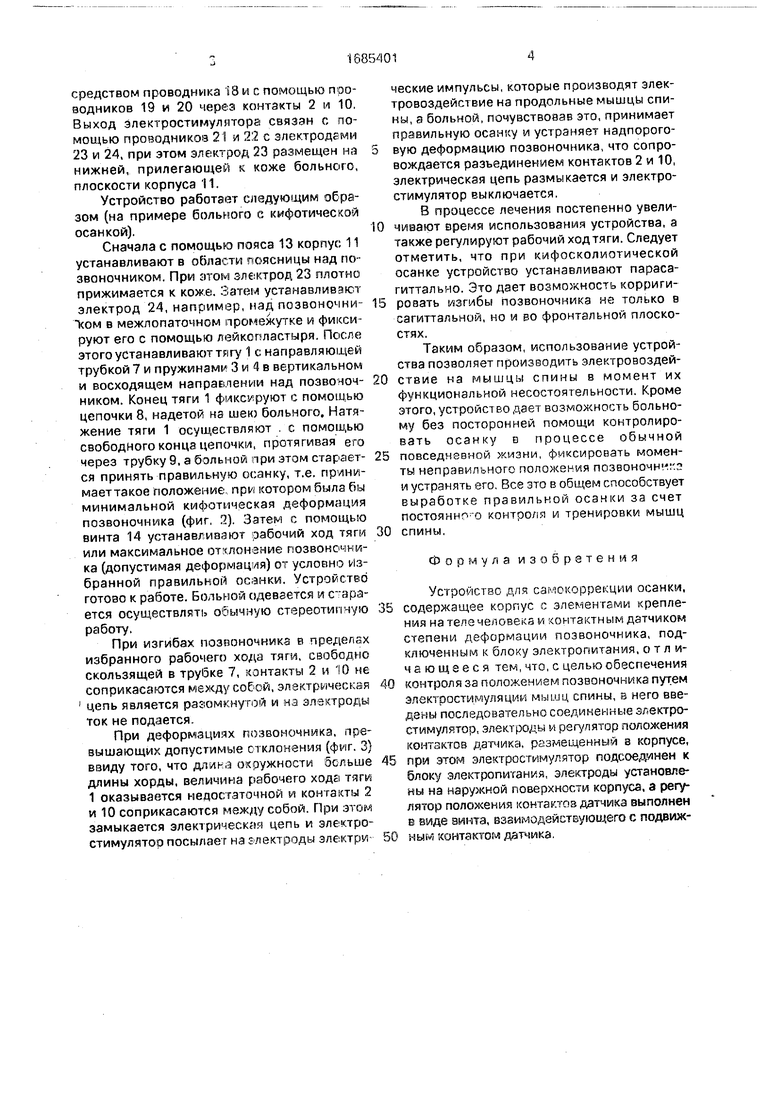
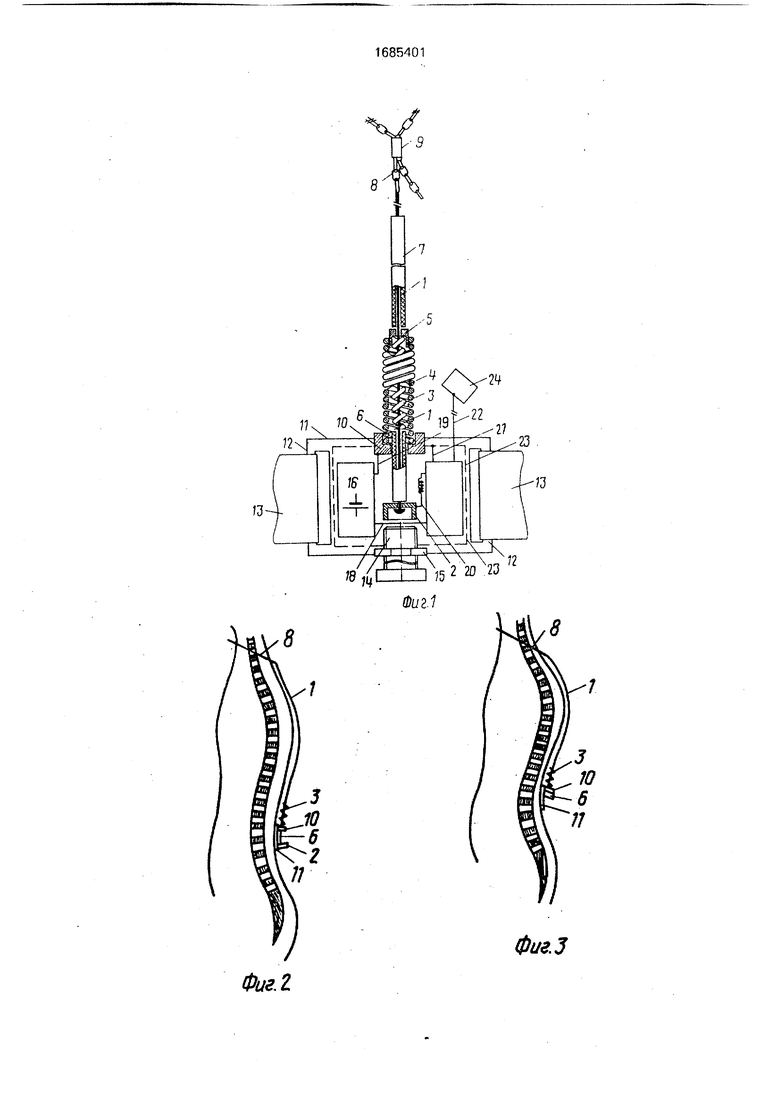
На фиг. 1 изображено схематично устройство для самокоррекции осанки; на фиг, 2 и 3 - схема работы устройства.
В устройстве на конце гибкой тяги 1 размещен чашеобразный электрический контакт 2 датчика степени деформации позвоночника с отверстием в центре под тягу. Возвратно-поступательные движения тяги 1 осуществляются в просвете пружин 3 и 4, помещенных одна в другую, концы которых жестко соединены между собой, например с помощью цилиндрической втулки 5 с отверстием под тягу. Между свободным концом пружины 3 малого диаметра и контактом 2 размещена трубка б из диэлектрического материала Миновав трубку 6, пружину 3 и втулку 5, тяга 1 попадает в
просвет гибкой направляющей трубки 7. На противоположном конце тяги 1 имеется верхний накожный фиксатор положения тяги, например, в виде декоративной цепочки 8, надетой на шею больного. При этом концы цепочки пропущены сквозь эластичную трубку 9 с небольшим просветом, что способствует плотному расположению между собой начального и концевых отделов цепочки и дает возможность регулировать величину натяжения тяги 1.
Противоположный к втулке 5 конец пружины 4 большего диаметра фиксирован снаружи в электрическом контакте 10 датчика степени деформации позвоночника. Контакт 10 жестко фиксирован на корпусе 11, в виде пряжки, ушки 12 которой снабжены поясом 13. Регулятор положения контактов содержит винт 14, установленный против контакта 2 в стойке 15 корпуса 11. Кроме этого, в корпусе 11 размещен блок 16 электропитания, а также электростимулятор 17, соединенный с блоком электропитания поСО
с
Os
00
ел о
средством проводника 18 и с помощью п оо- аодников 19 и 20 через контакты 2 м 10. Выход электростимул иторе связан с помощью проводников 21 и 22 с электроде ми 23 и 24, при этом электрод 23 размещен на нижней, прилегающей к коже больного, плоскости корпуса 11.
Устройство работает следующим образом (на примере больного с кифотической осанкой).
Сначала с помощью пояса 13 корпус 11 устанавливают в области поясницы над позвоночником. При атом зле ктрод 23 плотно прижимается к коже. Затем устанавливают электрод 24, например, над позвоночником в межлопаточном промежутке и фиксируют его с помощью лейкопластыря. После этого устанавливают тягу 1 с направляющей трубкой 7 и пружинами 3 и 4 в вертикальном и восходящем направпении над позвоночником. Конец тяги 1 фиксируют с помошью цепочки 8, надетой на шею больного. Натяжение тяги 1 осуществляют с помощью свободного конца цепочки, протягивая его через трубку 9, а больной при этом старается принять правильную осанку, т.е. прини- маеттакое положение при котором была бы минимальной кифотическая деформация позвоночника (фиг, 2). Затем с помощью винта 14 устанавливают эабочий ход тяги или максимальное отчлонэние позвоно ки- ка (допустимая деформация) от условно Избранной правильной осанки. Устройство готово к работе. Больной одевается и ется осуществлять ооычмую стереотипную работу.
При изгибах позвоночника в пределах избранного рабочего ходи тяги, свободно скользящей в трубке 7, контакты 2 и 10 не соприкасаются между соЕсй, электрическая 1 цепь является разомкнутой и из электроды ток не подается.
При деформациях позвоночника, превышающих допустимые отклонения (фмг. 3} ввиду того, что дликз окружности осльше длины хорды, величина рабочего хода тяги 1 оказывается недостаточной и контакты 2 и 10 соприкасаются между собой. При .этом замыкается электрическим цепь и электро- стимулятоо посыпает на злектроды электрм
ческие импульсы, которые производят электровоздействие на продольные мышцы спины, а больной, почувствовав это, принимает правильную осанку и устраняет надпороговую деформацию позвоночника, что сопровождается разьединением контактов 2 и 10, электрическая цепь размыкается и электростимулятор выключается.
В процессе лечения постепенно увеличивают время использования устройства, а также регулируют рабочий ход тяги. Следует отметить, что при кифосколиотической осанке устройство устанавливают параса- гиттальчо. Это дает возможность корригировать изгибы позвоночника не только в сагиттальной, но и во фронтальной плоскостях.
Таким образом, использование устройства позволяет производить электровоздейсгвие на мышцы спины в момент их функциональной несостоятельности. Кроме этого, устройство дает возможность больному без посторонней помощи контролировать осанку в процессе обычной
повседневной жизни, фиксировать моменты неправильного положения позвоночн1, и устранять его Все зто в общем способствует выработке правильной осанки за счет постоянна о контроля и тренировки мышц
спины.
Формула изобретения
Устройстве для самокоррекции осанки,
содержащее корпус элементами крепления на теле человека и онтактным датчиком степени деформации позвоночника, подключенным к блоку электропитания, отличающееся тем, что, с целью обеспечения
контроля за положением позвоночника путем электоостимуляции мышц спины, в него введены последовательно соединенные электростимулятор, электроды и регулятор положения контактов датчика, размещенный г корпусе,
при зто элекгростимулятор подсоединен к блоку электропитания, электроды установлены на наружной поверхности корпуса, а регулятор положения контактов датчика выполнен в виде винта, взаимодействующего с подвижным контактом датчика
W
Изобретение относится к устройствам для лечения пороков осанки. Цель изобретения - обеспечение контроля за положением позвоночника путем электростимуляции мышц. Устройство состоит из электростимулятора 17 и электродов 23 и 24, расположен- ных на спине больного, причем электростимулятор снабжен включателем блока 16 электропитания в виде контактов 2 и 10, приводимым в действие с помощью гибкой подпружиненной тяги 1, расположенной вдоль длинника позвоночника в проекции его деформации. 3 ил.
8
8
Фм.З
| Актуальные вопросы травматологии и ортопедии | |||
| Сб | |||
| трудов ЦИТО, вып | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
