1
(21)4750152/10 (22) 16.10.89 (46)23.10.91. Бюл. №39
(71)Кировоградское специальное конструк- торско-технологическое бюро Производственного объединения Пищмаш
(72)В.Н.Ходусов, М.Е.Дородный, Л.Н.Ани- симова и В.К.Щербаковский (53)681.26(088.8)
(56)Авторское свидетельство СССР Nb 530191, кл. G 01 G 1/28. 1975. (54) МЕХАНИЗМ НАЛОЖЕНИЯ ГИРЬ
(57)Изобретение относится к массоизмери- тельным приборам, в частности к торговому весоизмерению. Цель изобретения - снижение металлоемкости и повышение производительности. При нажатии на клавиши управления i рычаги управления опускаются до тех пор, пока нижняя плоскость фиксатора положения снятых гирь,
выполненного в виде паза А, не опустится ниже нижней плоскости траверсы, после чего рычаги управления смещаются вправо и фиксируются пазом А. Гиревые подъемники при этом повернутся на оси и поднимут соответствующие гири за ось, сняв ее с призмы гиреприемного кронштейна рычага весов. При наложении гири клавиши управления сдвигают влево. При этом рычаги управления под действием массы гирь и усилия растянутых пружин поднимутся до упора фиксатором положения наложенных гирь, выполненного в виде выступа Б, а гиревые подъемники повернутся и опустят гири на призму гиреприемного кронштейна рычага весов. Подвижные ролики, установленные на рычагах, прогнут гибкий элемент (ленту) на определенную величину и она приведет в действие механизм индикации. 2 ил.
fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения веса | 1985 |
|
SU1281911A1 |
| Моментомер | 1988 |
|
SU1557461A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Механизм гиреналожения большегрузных весов | 1979 |
|
SU859823A1 |
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
| Устройство для поверки метрологических показаний рычажных весовых дозаторов при их юстировке | 1976 |
|
SU591713A1 |
| Цифровое весоизмерительное устройство | 1973 |
|
SU479004A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
Изобретение относится к массоизмери- тельным приборам, в частности к торговому весоизмерению.
Цель изобретения - снижение металлоемкости и повышение производительности.
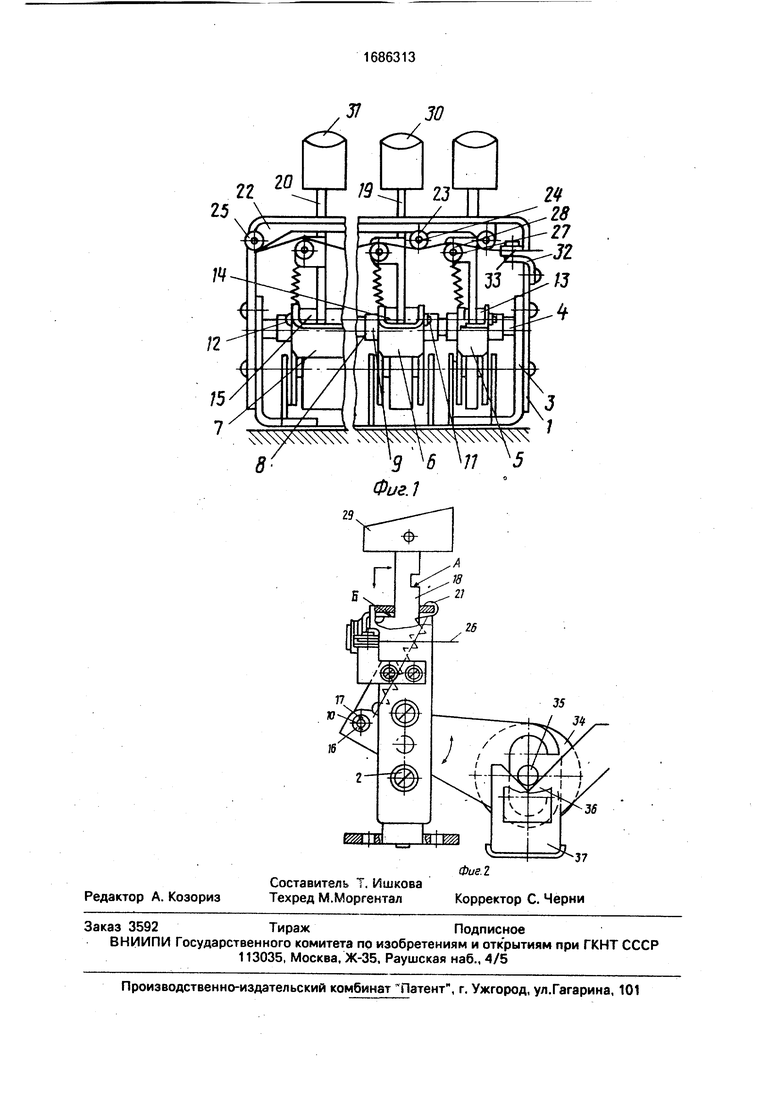
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 - то же, вид сбоку.
Механизм состоит из П-образной траверсы 1, которая четырьмя винтами 2 соединена с двумя Г-образными стойками 3, имеющими по два отверстия для крепления механизма на основании весов. В верхней части стоек 3 имеются отверстия, в которые входит ось 4. На последней расположены гиревые подъемники 5-7 и стопорные втулки
8 с винтами 9, которые ограничивают перемещение подъемников 5-7 вдоль оси 4. С подъемниками 5-7 посредством осей 10-12 и распорных втулок 13-15, а также шайб 16 и шплинтов 17 шарнирно соединены плоские рычаги 18-20 управления, расположенные в прямоугольных отверстиях траверсы 1. Для возврата рычагов 18-20 в верхнее положение служат пружины 21 растяжения, закрепленные одним концом за отверстия в траверсе 1, а другим - за отверстия в гиревых подъемниках 5-7. К траверсе 1 прикреплена неподвижная направляющая 22 с установленными на ней на осях 23 неподвижными роликами 24 и барабаном 25. Ролики 24 предназначены для направления и
Os
СО
о
со
GJ
опоры гибкого элемента (ленты) 26. Барабан 25 служит для закрепления конца ленты 26 и регулирования ее натяжения. Второй конец ленты 26 соединен с механизмом индикации массы уравновешиваемого груза. На отогнутых под углом 90° частях рычагов 18- 20 управления на осях 27 установлены подвижные ролики 28. Подвижные ролики 28 на рычагах 18-20 управления гиревых подъемников 5-7 установлены на различной высоте. На верхние концы рычагов 18-20 управления крепятся приводные элементы в виде клавиш 29-31 на верхней плоскости. На рычагах 18-20 управления имеются фиксаторы положения снятых гирь, выполненные в виде пазов А, служащие для их фиксации в траверсе в нижнем положении, и фиксаторы положелия наложенных гирь, выполненные в виде выступов Б, которые ограничивают ход рычагов 18-20 управления вверх. Для разворота ленты 26 в нужном направлении, с целью присоединения ее к механизму индикации, на траверсе 1 установлен кронштейн 32 с роликом 33. Ролики 28, установленные на рычагах 18-20, при ходе последних вверх прогибают ленту 26 на участках между неподвижными роликами 24 направляющей 22 на разную величину, в результате чего при подъеме клавиши 30 с цифрой 2 конец ленты 26, соединенный с механизмом индикации, перемещается на величину в два раза большую, чем при подъеме клавиши 29 с цифрой 1, а при подъеме клавиши 31с цифрой 3 - на величину в три раза большую, чем при подъеме клавиши 29 с цифрой 1.
При подъеме группы клавиш 29-31 эти величины складываются автоматически в результате того, что все ролики 28 воздействуют на один суммирующий орган - ленту 26 За счет этого осуществляется суммарная индикация массы груза до 9 кг уравновешиваемой накладными гирями.
Механизм наложения гирь работает следующим образом.
При нажатии на клавишу 29 с цифрой 1, рычаг 18 опускается до тех пор, пока нижняя плоскость паза А не опустится ниже нижней плоскости траверсы 1. После этого
рычаг 18 сместится вправо и зафиксируется пазом А на траверсе 1. Так как рычаг 18 шарнирно связан с подъемником 5, то подъемник 5 повернется на оси 4 и поднимет гирю 34 за ее ось 35, сняв ее с призмы 36
гиреприемного кронштейна 37 рычага весов.
Для наложения гири 34 необходимо сдвинуть клавишу 29 с цифрой 1 влево. При этом под действием массы гири 34 и
усилия растянутой пружины 21 рычаг 18, вышедший из зацепления с траверсой 1, поднимется до упора выступом Б в нижнюю плоскость направляющей 22, а гиревой подъемник 5 повернется и опустит гирю 34
на призму 36 гиреприемного кронштейна 37 рычага весов. Подвижный ролик 28, установ- ленный на рычаге 18, прогнет ленту 26 на определенную величину, и лента 26 приведет в действие механизм индикации.
Формула изобретения
Механизм наложения гирь, содержащий гиревые подъемники, связанные с приводными элементами и индикатором, отличающийся тем, что, с целью снижения
металлоемкости и повышения производительности, он снабжен неподвижной направляющей, связанными с гиревыми подъемниками подпружиненными рычагами управления с фиксаторами положения
снятых гирь, выполненными в виде пазов, и фиксаторами положения наложенных гирь, выполненных в виде выступов, суммирующим органом-, включающим гибкий элемент, закрепленными на неподвижной
направляющей неподвижными роликами и закрепленными на рычагах управления подвижными роликами, при этом гибкий элемент расположен между неподвижными и подвижными роликами и жестко закреплен
одним концом на неподвижной направляющей, а вторым связан с индикатором.
#30
rCS О
8
/
29
J7
d)iy/ 7
Составитель Т. Ишкова Редактор А. КозоризТехред М.МорганталКорректор С. Черни
9 V7
/7 X5
Фиг.1
