128191
и включает и включает режим точного уравновешивания. От блока 29 КМ включается ключ 33, электропривод 19 и электромагниты 21, соответствующие введенным значениям массы гирь 14. Электропривод 19 поворачивает кулачки 17 и опускает в конусные гнезда 13 те из гирь 14, у которых стопоры 22
1
Изобретение относится к области- приборостроения, а именно к устройствам для комбинированного определения веса изделий путем частичной компенсации их веса массой гирь и частичного уравновешивания за счет электромагнитного уравновешивания.
Цель изобретения - повышение быстродействия путем автоматизации процесса уравновешивания весоизмерительной системы и сокращения времени ее успокоения.
На чертеже изображена схема устройства для определения веса изделия
Предлагаемое устройство содержит коромысло 1 с замком 2, служащим для крепления изделия 3. Коромысло снабжено опорной призмой 4, траверсой 5 и регулятором 6 чувствительности. Коромысло 1 установлено на опорных по- ;Душках 7 и охвачено с двух сторон П- образным рычагом 8, к которому прикреплены подвижная часть силового компенсационного преобразователя 9, опорные призмы 10 и упругие ленточ ны связи 11,соединяющие П-образный рычаг 8 с траверсой 5. П-образный рычаг 8 установлен на опорных подушках 12, расположенных в одной горизонтальной плоскости с опорными подушками 7 коромысла 1, и к нему рядом с силовым компенсационным преобразователем 9 прикреплены передвижные гнезда 13, служащие для установки кони- черких гирь 14, надетых на конусные наконечники 15 штанг 16, которые перемещаются в вертикальном направлении с помощью кулачков 17, укрепленных на валу 18 электропривода 19. Штанги 16 удерживаются в верхнем положении с помощью фиксаторов 20, со- держащргх электромагниты 21 с защелками 22, плоские пружины 23. В каж1 ,
отведены электромагнитами 21. При помощи блока 30 ПКМ окончательно уравновешиваются изделия 3 за счет увеличения тока с силового компенсационного преобразователя 9, значение которого через аналого-цифровой преобразователь 31 выводится на индикатор 32. 1 ил.
дой штанге 16 выполнен паз 24, в который входит защелка 22. На П-образ- ном рычаге 8, кроме того, установлены .регулятор 25 тары и подвижный элемент 26 датчика 27 разбаланса, электрически связанного с усилителем 28.
Блок 29 гиревой компенсации момента и блок 30 переключения пределов компенсации момента служат для управления током силового компенсационного преобразователя 9. Для этого блок 30 переключения пределов компенсации момента одним из входов связан с выходом силового компенсационного преобразователя 9, а вторым входом - с выходом блока 29 гиревой компенсации момента, а .его выход через аналога-цифрозой преобразователь 31 соединен с блоком 32 цифровой индика0
5
0
5
ЦИИ.
Один из выходов блока 29 гиревой компенсации момента соединен с ключом 33, управляющим электромагнитными фиксаторами 20 и электроприво0
дом 19. Выключение электропривода 19 производится от выключателя 34.
Для ограничения амплитуды качания коромысло 1 снабжено пальцем 35, взаимодействующим с регулируемыми упорами 36 и 37. Для установки замка 2 на коромысло 1 нанесена шкала 38, а на противоположный конец коромысла установлен противовес 39.
Устройство работает следующим об- 5 разом.
Замок 2 устанавливается по шкале 38 на расчетньш размер С, а коромысло 1 и П-образный рычаг уравновешиваются противовесом 39 и регулятором
0
25. Устройство приводится в исходное состояние, гири 14 поднимаются из конусных гнезд 13 с помощью электропривода 19, кулачков 17 и штанг 16.
Штанги 1Ь фиксируются в верхнем п.рло- жении посредством электромагнитов 21 с защелками 22,
Изделие 3 устанавливается в замок 2. Коромысло 1 вместе с П-образным рычагом 8 наклоняется до соприкосновения пальца 35 в нижний регулируемый упор 37, а датчик 27 разбаланса вырабатывает и подает сигнал на вход усилителя 28, выходной ток с которого поступает на вход силового компенсационного преобразователя 9 и на вход аналого-цифрового преобразователя 31, а из него - на вход блока 32 цифровой индикации. Значение веса переносится оператором 29 гиревой компенсации момента. Затем посредством блока- 29 гиревой компенсации момента блок 30 переключения пределов ком- .пенсации момента отключает режим грубого уравновешивания и включает режим точного уравновешивания. При Зтом от блока 29 гиревой компенсации момента включаются ключ 33, электропривод 19 и электромагниты 21, соответствующие введенным значениям массы гирь 1А. Электропривод 1 поворачивает кулачки 17 и опускает в конусные гнезда 13 те из гирь 14, у которых стопоры 22 отведены включенными оператором электромагнитами 21.
Затем от аналого-цифрового преоб- разователя отключаются старшие декады блока 32 цифровой индикации и включаются младшие декады, при этом на блоке цифровой индикации сохраняется значение масс наложенных гирь 14.
При помощи блока 30 переключения пределов компенсации момента оконча- тельно уравновешивается изделие 3 за счет увеличения тока, поступающего на вход силового компенсационного
Редактор А.Шишкина Заказ 73
Составитель О.Крюков Техред Л.Сярдюкова.
Тираж 714 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие г. Ужгород, ул. Проектная, 4
0
91
5 0
35
О
14
преобразователя 9. Значение этого то-. ка через аналого-цифровой преобразователь 31 выводится на младшие разряды блока 32 цифровой индикации.
Результирующее значение веса представляет собой сумму значений масс гирь 14, опущенных на П-образньш рычаг 8, и величины тока, поступающего на силовой компенсационный преобразователь 9.
Формула изобретения
Устройство для определения веса, содержащее коромысло с замковым креплением для изделия и силовым компенсационным преобразователем, связанным с блоком цифровой индикации, отличающееся тем, что, с целью повышения быстродействия, в него введены блок переключения пределов компенсации момента и блок гиревой компенсации момента, при этом устройство снабжено расположенным в одной горизонтальной плоскости, установленным на опорные призмы и охватываюгцим коромысло с двух сторон П-образным рычагом, плечо которого, размещенное . со стороны замкового крепления, соединено ленточными упругими связями с коромыслом, содержащим ограничитель угла качания, а на другом плече П-образного рычага размещены блок переключения пределов компенсации момента к датчик разбаланса силового компенсационного преобразователя, выход которого связан через блок переключения пределов компенсации момента и аналого-цифровой преобразователь с блоком цифровой индикации, а блок гиревой компенсации момента своими выходами связан соответственно с блоком переключения пределов компенсации момента и блоком цифровой индикации.
Корректор Е.Сирохман Подписное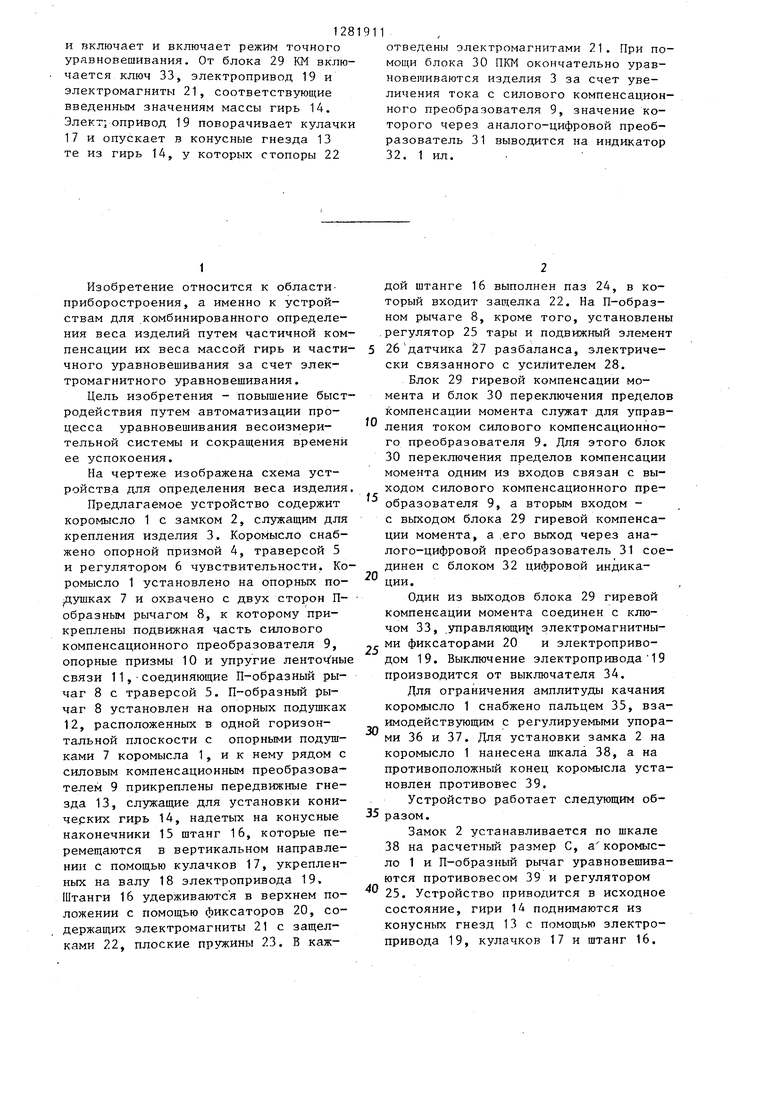

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1420417A1 |
Изобретение относится к устройствам для комбинированного определения веса изделий путем частичной компенсации их веса массой гирь и частичного уравновешивания за счет электромагнитного уравновешивания. Цель изобретения - повьппение быстродействия. Посредством блока 29 гиревой . компенсации момента (КМ) блок 30 переключения пределов компенсации момента (ПКМ) отключает режим грубого (Л со
| 0 |
|
SU302619A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения моментного веса изделий | 1979 |
|
SU859824A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
