(54) МЕХАНИЗМ ГИРЕНАЛОЖЕНИЯ БОЛЬШЕГРУЗНЫХ ВЕСОВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Моментомер | 1988 |
|
SU1557461A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
1
Изобретение относится к области весоизмерительной техники, а именно к устройствам и узлам прецизионных большегрузных весов.
Известен механизм гиреналожения весов, содержащий комплект гирь, систему рычагов, рейку с кронштейнами для гирь и редуктор Ll Однако гиревый механизм не обладает требуемой точностью и труден в управлении из-за наличия сложного редуктора .
Из известных устройств наиболее близким по технической сущности к предлагаемому является устройство, содержащее комплект гирь, связанных с толкателями, механизм перемещения толкателей и привод fz.
Механизм имеет недостаточную точность и надежность в работе из-за наличия сложной кинематики управляк щих рычагов с фиксирующими валиками и лунками.
Цель изобретения - повышение точности и надежности.
Указанная цель достигается тем, что механизм перемещения толкателей выполнен в виде рычагов с пазами и электромагнитных упоров, причем ширина пазов больше толщины электромагнитных упоров,а рычаги расположены в одной горизонтальной плоскости и жестко соединены осью с дополнительным рыча10гом, взаимодействующим через ролик и кулачок с приводом.
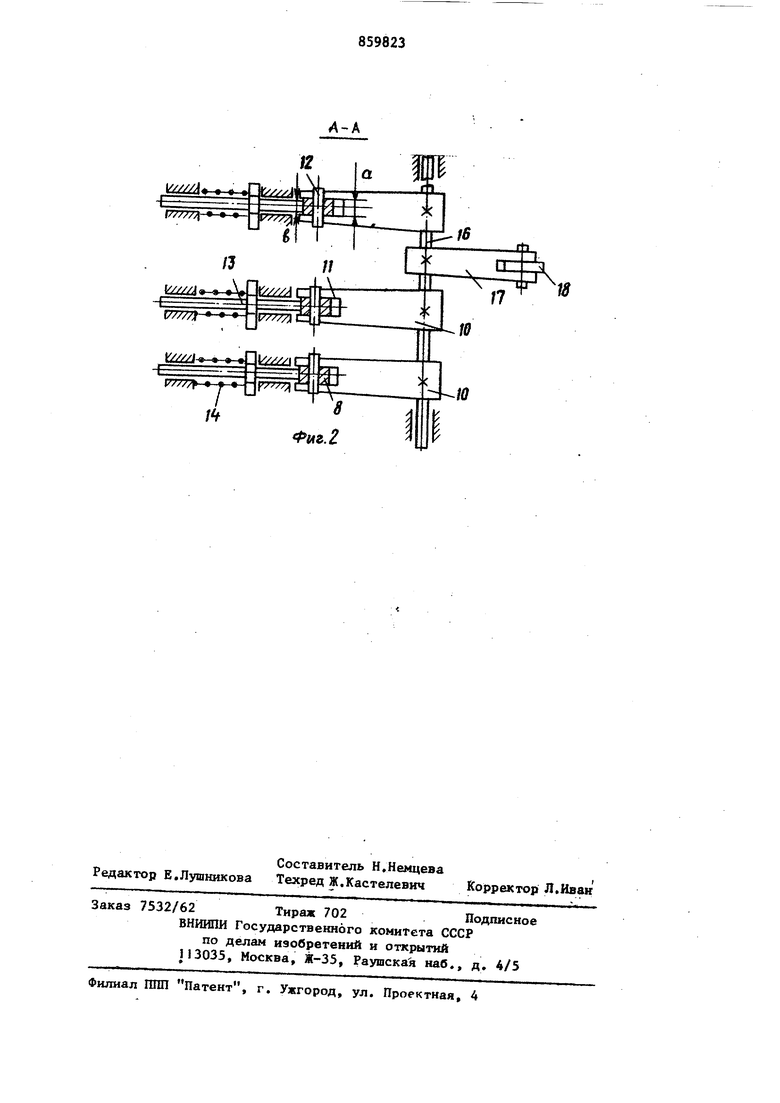
На фиг, I изображена конструкция механизма гиреналржеиия; на фиг. 2 сечение А-А на фиг. 1.
15
Устройство содержит комплект гирь 1, снабженных наружными и внутренними конусными посадочными поверхностями 2 и 3 с кольцевыми центральными . выточками 4 и 5, конусные посадочные
20 гнезда 6, жестко установленные на коромысле 7, толкатели 8 с конусными наконечника1)и 9, рычаги 10, снабженные пазами 11, взаимодействующие с гори3эонтальными валиками J 2 т лкателей 8, и фиксирующие электромагнитные упоры 13 с пружинами 14 и электромагнитами 15. , Наружные и внутренние конусные посадочные поверхности 2 и 3 комплекта гирь I взаимодействуют, соответственно, с конусными гнездами бис наконечниками 9 толкателей 8, а ширина (X пазов 11 выбрана большей толщины фиксируюа(их упоров 13. Рычаги 10 расположены в одной горизонтальной плоскости и жестко соеди нены через.ось 16 с дополнительным ры чагом 17, взаимодействующим через ролик 18 и кулачок 19 с приводом 20 электромеханического типа. На коромысле 7 имеются ограничители 21, компенсатор 22, флажок 23, иуль-индикатор 24, гайки регулировки чувствительности 25 и статической балансировки 26, опорная призма 27 с подушкой 28 и концевая призма 29 с тягой 30, шарнирно связывающей коромысло 7 с опорным рычагом 31, снабженным призмой 32 с подушкой 33 и подвеской 34 с чашкой 35 для измеряемого т-руза 36 н ограничиванщей опор ной (стрункой) 37. Кроме того, устройство содержит усилитель 38 с табло предварительного 39 и точного 40 отсчетов и у тройство электрического управления 41 с фиксирующими электромагнитными упорами 13, микровыключатели 42 для останова привода 20. Площадки 43 на коромысле 7 служат для регулировки конусных посадочных гнезд 6, согласно длины его рабочего плеча 2 . Работа механизма гиреналожения пр исходит следующим образом. Измеряемый груз 36, установленный на чашку 35, вносит разбаланс в. опорный рычаг 31 и далее через тягу 30 в коромысло 7, отклоняющейся на угол Д f . Нуль-индикатор 24 подает электрический сигнал и ЗУ в усилитель 38, от куда подается уравновешивающий ток Jc( в компенсатор 22 и соответствующ сигнал S-, в табло предварительного отсчета 39. . Оператор с помощью устройства электрического управления 41 произво лит включение электромагнитов 15 согласно показаний табло предваритель ного отсчета 39, в результате чего 3 упоры 13 перемещаются влево и выходят из контактов с толкателями 8. При включении привода 20 дополниннтельный рычаг 17 поднимается вверх, а рычаг 10 вниз, в результате чего те из толкателей 8, под которыми убраны фиксирующие упоры 13, опускаются вниз, накладывая гири I на конусные гнезда 6 коромысла 7. При дальнейшем опускании рычагов 10, последние проходят своими пазами I } через злектромагнитные упоры 13, не убранные элект1зомагнитами 15, не задевай их. При этом гири 1, электромагниты 15 которых не включены, находятся в верхних положениях на конусных наконечниках 9 толкателей 8. Толкатели 8, электромагниты которых включены, свободно опускаются вниз и выходят своими конусными наконечниками 9 из контакта с внутренним конусными посадочными поверхностями 3 гирь 1. После наложения соответствующих гирь J снова включается нуль-индикатор 24, реагирующий на остаточный небаланс коромь)сла 7 Д Ч и вьодающий электрический сигнал Ugy в усилитель 38, который подает уравновешивающий TOKJ в компенсатор 22 возвращающий коромысло 7 в исходное положение, когда . На табло точного 40 отсчета с устройства электрического управления 4 и с усилителя подается суммарный сигнал Sj и SQ, соответствующий полной массе п исследуемого груза 36 ) где К - коэффициент пропорциональности. Для удобства отсчета шкалы табло 39 и 40 градуируются непосредственно в единицах массы. Использование предлагаемого изобретения позволит повысить точность и надежность работы механизма гиреналожения большегрузной весов. Формула изобретения Механизм гиреналоження большегрузных весов, содержащий комплект гирь, связанных с толкателями, механизм перемещения толкателей и привод, о тличающийся тем, что, с це:лью увеличения точности и надежности.
полней в виде рычагов с пазами и электромагнитных упоров, причем ширина пазов больше толщины электромагнитных упоров, а рычаги расположены в одной горизонтальной плоскости и жестко соединены осью с дополнительным рычагом, взаимодействующим через ролик и кулачок с приводом.
принятые во внимание при экспертизе.
t. Авторское свидетельство СССР 226192, кл. G 01 G 1/ 29, 30.01.1967
000,000
,,1 I t . I t У р 11 III 1Г-Н
J «/
