f
(21)4664842/28
(22)18.01.89
(б) .91. Бюл, № 41
(71)Институт электросварки им,Е.О.Патона
(72)НоТ.Хромяк и Н.В.Горлицын
(53)620.179.16(088.8)
(56)Авторское свидетельство СССР № 926591, кл„ G 01 N 29/04, 1982.
Авторское свидетельство СССР № 989459, кл. G 01..N 29/04, 1983.
(54)МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ЛОКАЦИИ ИСТОЧНИКА АКУСТИЧЕСКОЙ ЭМИССИИ
(57)Изобретение относится к области неразрушающего контроля и может быть использовано для обнаружения дефектов в изделиях, например в сварных металлоконструкциях, по сигналам акустической эмиссии. Цель изобретения - повышение достоверности контроля за счет обеспечения возможности обработки большего числа сигналов в реальном масштабе
времени. Сущность изобретения состоит в том, что одновременно с определением дискретных значений сигнала в каждом из-каналов выделяют его огибающую и обрабатывают в два этапа. На -первом этапе определяют дискретные значения огибающей сигнала, по которым производят его селекцию по амплитудному признаку и находят приблизительное положение точек, определяющих форму сигнала. Нэ втором этапе по этим данным и по зарегистрированным дискретным значениям сигнала уточняют положение точек, определяющих форму и момент прихода сигнала, и определяют амплитудные и временные параметры сигналов. В качестве дискретного значения огибающей сигнала на интервале дискретизации принимают максимальное дискретное значение сигнала на этом интервале. Это позволяет увеличить число обрабатываемых сигналов в реальном масштабе времени. 3 ил.
Do

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КАЧЕСТВА СВАРНОГО ШВА В ПРОЦЕССЕ СВАРКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379677C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Устройство дя определения граничных точек хроматографического пика | 1988 |
|
SU1587547A2 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| Многоканальное устройство для определения координат множества одновременно действующих источников акустических сигналов | 1984 |
|
SU1201753A1 |
| Устройство для акустико-эмиссионного контроля дефектов | 1986 |
|
SU1337760A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ТРУБОПРОВОДА | 1992 |
|
RU2037798C1 |
| Устройство для определения места расположения дефекта | 1977 |
|
SU720351A1 |
| УСТРОЙСТВО ДЛЯ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 2011 |
|
RU2472145C1 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ СОСУДОВ, РАБОТАЮЩИХ ПОД ДАВЛЕНИЕМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431139C1 |
Изобретение относится к области неразрушающего контроля и может быть использовано для обнаружения дефектов в изделиях, например в сварных металлоконструкциях, по сигналам акустической эмиссии.
Цель изобретения - повышение достоверности измерений за счет обеспечения возможности обработки большего числа сигналов в реальном масштабе времени.
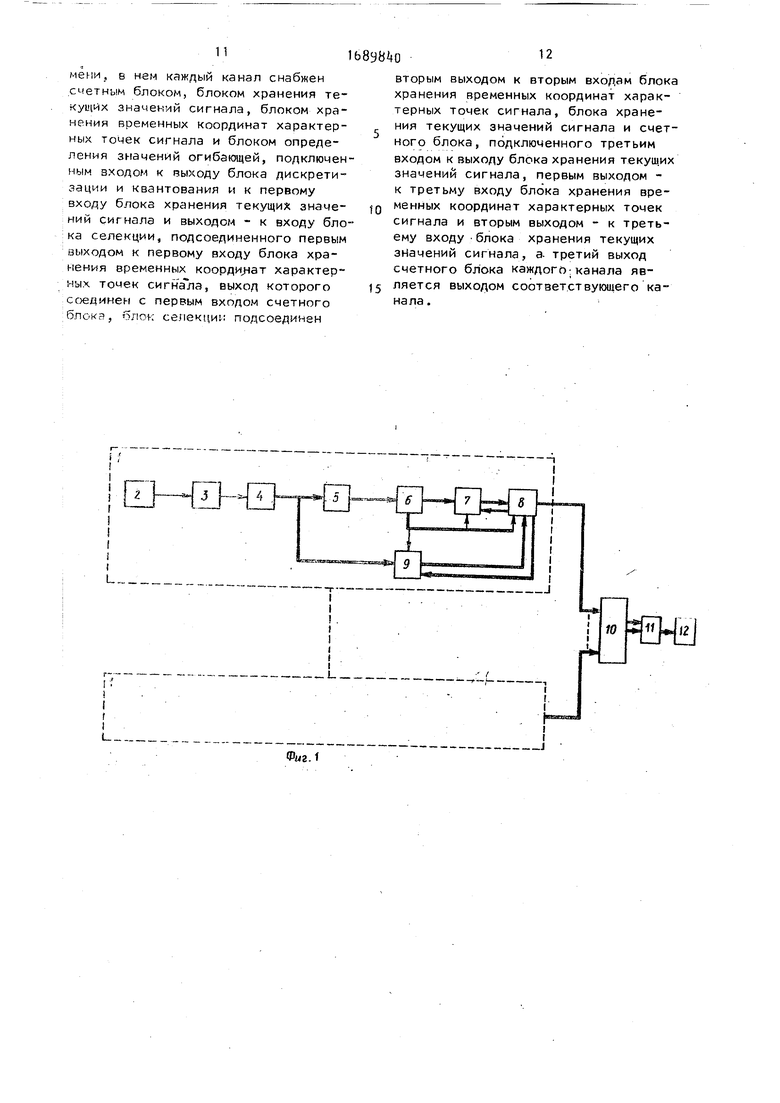
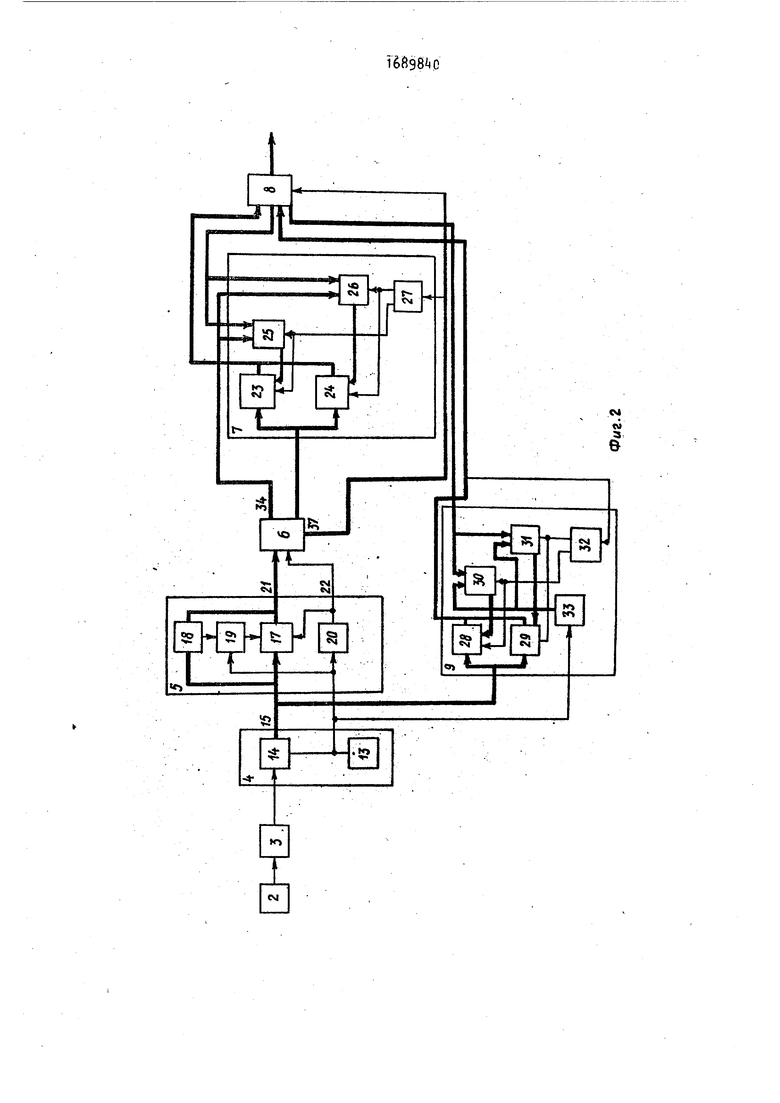
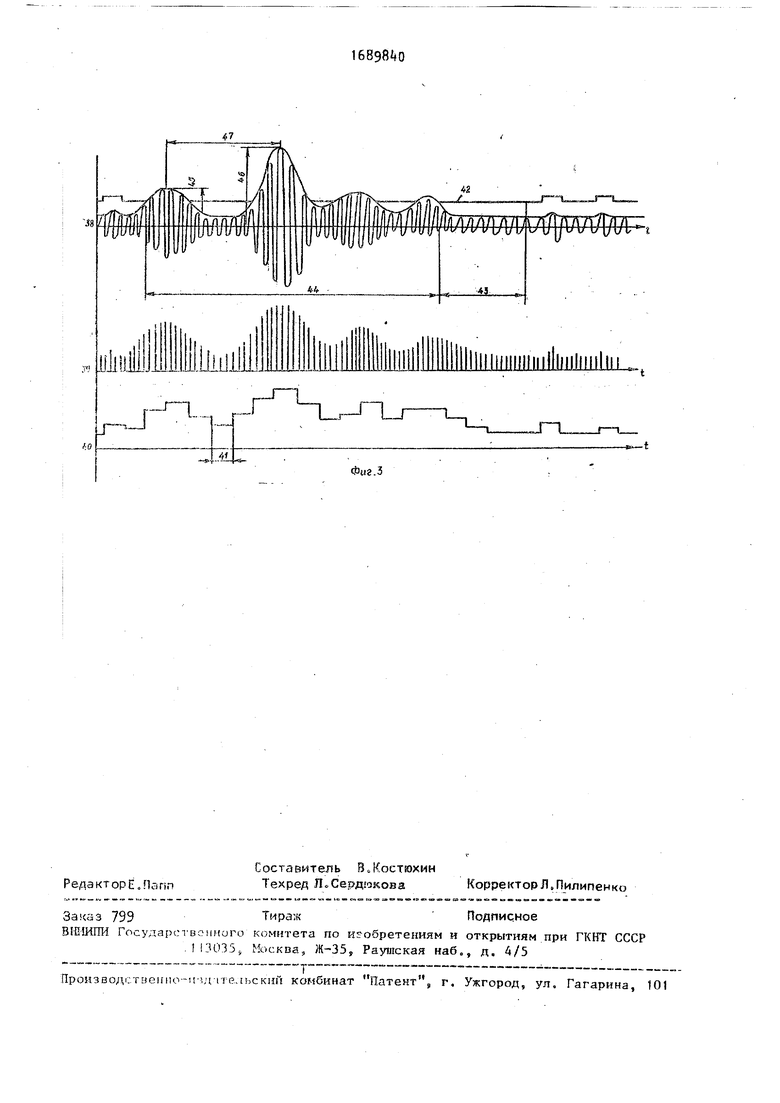
На фиг. 1 представлена функциональная схема многоканального устройства для локации источника акустической эмиссии; на фиг. 2 - вариант реализации канала устройства; на фиг 3 - временные диаграммы, поясняющие работу устройства.
Устройство для обработки сигналов акусти.ческой эмиссии содержит п каналов 1, каждый из которых состоит
3
из последовательно соединенных электроакустического преобразователя 2, усилителя 3, блока k дискретизации и квантования, блока 5 определения значений огибающей сигнала, блока б селекции, блока 7 хранения временных координат характер™ |ных точек сигнала и счетного блока 8, а также включает в себя блок 9 р.анения текущих значений сигнала, и последовательно соединенные блок 10 памяти, вычислительный блок 11 и блок 12 визуализации,
Выходы каналов 1 соединены с соответствующими входами блока 10 памяти, Количество каналов I определяется размерами контролируемого объекта и требуемой точностью лока- пизэцич источников акустической эмиссии, обычно . 8 каждом канале 1 выход блока k дискретизации и квантования соединен с первым входом блока 9, подключенного вторы входом к второму выходу блока 6 секции и ,с вторым входам блока 7 и счет ного блока 8, подсоединенного первы выходом к третьему РХОДУ блока 7S вторым выходом к третьему входу блока 9 и третьим входом к выходу блока 3- Третий выход счетного блока 8 каждого канала i является выходом соответствующего канала 1,
Блок k дискретизации и квантования содержит (фиг,2} генератор 13 тактовых импульсов и ана ноге-цифровой преобразователь ;А1|П) 1, вход синхронизации которого соединен с выходом генератора 3, а информативный сход АЦП 14 является входом блока , первым выходом 15 которого является выход АЦП 1. Вторым выходом 16 блока Ц является выход генератора 13.
Блок 5 определения значений огибающей сигнала содержит () регистр 17, последовательно соединенные элемент 18 сравнения, первый вход которого соединен с выходом регистра 17i и элемент И 19, выход которого соединен с входом записи регистра 17, а также делитель 20 частоты, выход которого соединен с входом сброса регистра 17. Информационный вход регистра 17 и второй вход элемента 18 сравнения являются информационным входом, а второй вход элемента И 19 и вход делителя 20 частоты являются входом синхро
5
0
низации. Первым 21 и вторым 22 выходами блока 5 являются соответственно выходы регистра 17 и делителя 20 частоты.
Блок 6 селекции может быть реализован на любом программном или микропрограммном блоке обработки, имеющем набор основных логических и, арифметических операций и быстродействие, обеспечивающее выполнение цикла обработки одного текущего знамения огибающей сигнала за интервал времени, равный целому числу интервалов дис- )ретизации0 Такой блок может быть выполнен на одном из стандартных микропроцессорных наборов БИС, например, серий 1802, 18о4, 1810 или 1816. Блок 7 хранения временных координат характерных точек сигнала содержит (фиг,2) модули 23 и 2k памяти; информационные входы которых являются первым (информационным) входом блока 7, а выходы являются первым выходом блока
5 75 коммутаторы 25 и 26, выходы которых соединены с адресными входами соответственно модулей 23 и 2 памяти, и триггер 27 выходы которого соединены соответственно с управляющими входами
0 модулей 23 и 2 памяти и коммутаторов 25 и 26„ Вход триггера 27 является вторым входом блока 7. Первые и вторые входы коммутаторов 25 и 26 являются соответственно первым и третьjj им входами блока 7«
Счетный блок 8 может быть реализован на любом программном или микро- , программном блоке обработки, имеющем набор основных логических и арифметических операций и быстродействие, обеспечивающее выполнение алгоритма определения информативных параметров сигнала за интервал времени, не превышающий длительности минимальной
5 паузы между сигналами акустической эмиссии, необходимой для их разделения. Ёлок 8 может быть выполнен на одном из стандартных микропроцессорных наборов БИС, например, серий
0 1802, 8(Й, 1810 или 1816.
4 Блок 9 хранения текущих значений ; сигнала содержит модули 28 и 29 памяти, информационные входы которых являются первым входом блока 9 а выходы их являются выходом блока 9 коммутаторы 30 и 31, выходы которых соединены соответственное адресными входами модулей 28 и 29, триггер 32, выходы которого соединены соответ0
5
ственно с управляющими входами модулей 28 и 29 памяти и коммутаторов 30 и 31,и счетчик 33, вход которого является первым входом блока 9- Выход счетчика 33 соединен с первыми информационными входами коммутаторов 30 и 31, вторые информационные входы которых являются третьим входом блока 9. Вход триггера 32 является вторым входом блока 9. Для обеспечения ад- р есаци модулей 23 и 24 памяти при передаче информации из блока 6 в блок 7 и из блока 7 в счетный блок 8 служат соответственно адресные шины 34 и 35, подключенные к коммутаторам 25 и 2б, а для обеспечения адресации модулей 2(8 и 29 памяти при передаче информации из блока 9 в счетный блок 8 - адресная шина 1Ъ, подключенная к вторым информационным входам коммутаторов 30 и 31. Позицией 37 обозначен выход блока 6 селекции, подключенный к второму входу счетного блока 8.
Устройство работает следующим образом.
Акустические сигналы принимают с помощью электроакустических преобразователей 2. Электрический CHI- нал 38 (фиг.З), представляющий со бой смесь шума и сигналов акустической эмиссии, усиливается в каждом канале 1 с помощью усилителя 3 и, осуществляется его дискретизация и квантование в блоке 4. При этом определяются абсолютные текущие значения 39 (фиг.З) входного сигнала с помощью АЦП 14 в моменты времени, соответствующие поступлению тактовых импульсов с выхода генератора 13, частота fTnследования которых выбирается исходя из требуемой точности определения временных параметров сигнала акустической эмиссии. В данном варианте реализации частота следования тактовых импульсов составляет frn 1 МГц, и период дискретизации входного сигнала составляет /v 1 мкс.
Далее осуществляется регистрация этих значений в блоке 9 (фиг.1).При этом значения записываются в один из модулей 28 или 29 памяти (в зависимости от состояния триггера 32) по адресу, который определяется состоянием счетчика 33 (фиг.2). Число разрядов счетчика 33 равно log,
где m - емкость каждого модуля 28 и 29 памяти. В свою очередь тп THfrn, где Тн - интервал наблюдения, кото- рый выбирается экспериментальным путем в соответствии с максимальной длительностью информативной части сигнала акустической эмиссии. В данном варианте Тн 4096 мкс, разрядQ ность счетчика 33 составляет 12 двоичных разрядов, и при регистрации происходит постоянное обновление значений, записанных за 4096 мкс до текущего момента.
5 Одновременно производят первый этап обработки дискретных значений. При этом определяется дискретное значение огибающей сигнала на каждом интервале времени, равном це0 лому числу периодов дискретизации входного сигнала„ В устройстве это реализуется следующим образом. Дискретные значения 39 ((Ьиг.З) поступают на информационный вход ре5 гистра 17 (фиг о 2) блока 5 определения значений огибающей сигнала. Новое значение записывается в регистр 17 по приходу соответствующего тактового импульса в случае, ес0 ли это значение больше значения, уже хранящегося в регистре 17. Этот анализ выполняется с помощью элемента 18 сравнения, а стробирование записи - тактовыми импульсами с вы5 хода элемента И 19. Тактовые импульсы поступают также на вход делителя 20 частоты. Коэффициент К деления частоты выбирается таким образом, чтобы период То следования им0 пульсов на выходе делителя 20 частоты превышал максимальную длительность цикла обработки одного значения огибающей в блоке 6, а аппроксимация огибающей сигнала с частотой
5 следования этих импульсов обеспечила бы возможность оценки формы сигнала (выделение информативных локальных экстремумов огибающей). В
данном случае К 16, Т0 -- Лбмкс,(
0
5
тп Регистр 17 сбрасывается по заднему
фронту выходных импульсов делителя 20 частоты, т.е один раз на 16 тактовых импульсов Таким образом, на выходе 21 блока 5 получаем дискретные значения огибающей 40 сигнала (фиг.З), причем в качестве этих значений служат максимальные дискретные значения 39 (фиг„3) на каждом
интервале времени Т0 (интервал 41 на фиг.З), равном целому числу К периодов дискретизации входного сигнала
По значениям огибающей 40 (фиг,3) производится сначала селекция сигнала акустической эмисии в блоке 6 селекции. Для каждого текущего значения AJ огибающей сигнала сравни- величину А. А,- - /Г;н , где А4(- вычисленное на предыдущем-шаге среднее значение сигнала за интервал времени 8 Т0 с константой;: АО обнаружения, которая определяется заранее опытным путемf например, по методу Неймана - Пирсона. Сигнал акустической эмиссии считается обнаруженным, если . В противном слуТ ЗЛ;-| чение А, --J-
чае вычисляете новое среднее значе-V 4процесс продолжаете до обнаружения сигнала акустической эмиссии. Переменный порог А0 обнаружения (А,0 -, Д0) , показан на фиг.З ЕЗ виде эпюры 42.
После обнаружения сигнала акустической эмиссии находится приблизительное (с точностью до TQ) положение точек, определяющих его форму Для этого блок 6 переводится в режим выделения локальных экстремумов (и/или других характерных точек - в соответствии с перечнем, определяемых в дальнейшем информативных пераметров) сигнала акустической эмиссии по значениям огибающей 40 (фиг.З). Номер интервала Тэ (в блоке 6 постоянно инкремени- руетсп номер текущего интервала Т0) на котором зафиксирован локальный экстремум (или другая характерная точка, в частности момент обнаружения сигнала акустической эмиссии), записывается в блоке 7. В данном случае реализации устройства запись производится в модуль 23 (или памяти (в зависимости от состояния триггера 2) по адресу, который задается из блока 6„ Одновременно в блоке 6 производится анализ сигнала с целью обнаружения момента его окончания. Это может быть выполнено, например, путем сравнения длительности интервала, в течение которого значения огибающей 40 (фиг.З) не превышают
5
0
5
0
5
5
«
действовавшего непосредственно перед обнаружением сигнала акустической эмиссии порога 42 (фиг„3), с длительностью минимальной паузы Тр 43 (фиг.З), необходимой для pas - деления сигналов акустической эмиссии. В данном случае Т« 1 мс.
Кроме того, после обнаружения сигнала акустической эмиссии в блоке 6 отсчитывается интервал Т наблюдения, В данном случае Тн 256 Т0. Если Т +., где Т - длительность 44 сигнала акустической эмиссии (фиг.З), то в конце интервала Тн производится переключение триггера 32, управляющего режимом работы блока 9 (что приостанавливает запись новых значений сигнала в соответствующий модуль 28 или 29 памяти), а также прекращается поиск характерных точек огибающей сигнала. При этом, однако, продолжается анализ сигнала акустической эмиссии с целью обнаружения момента его окончания. Если Т + , то переключение триггера 32 производится в конце паузы Тр. В конце паузы производится также запись в блок 7 текущего номера интервала (если момент окончания сигнала отнесен к числу его характерных точек) и переключение триггера 27, который изменяет режим работы модулей 23 и 2 в блоке 7.
Далее выполняется второй этап обработки, который состоит в определении информативных параметров (в том числе, точного момента приQ хода) сигнала акустической1 эмиссии по данным, определяющим положение его характерных точек (записанным в блоке 7), и дискретным значениям (записанным в блоке 9). К числу ин5 Формационных параметров могут быть отнесены, например, максимальная амплитуда, характеристики заданного числа первых локальных экстремумов, соответствующих модам ультразвуковых колебаний (их амплитуды и/или временные координаты) и т.п. В данном случае такими параметрами, помимо момента прихода сигнала, являются амплитуда k$ первой моды, амплитуда 46 второй моды и интервал 47 между их максимумами (фиг.З)
Рассмотрим процедуру определения указанных информативных параметров сигнала акустической эмиссии. Из
0
31
соответствующего модуля 23 и . памяти считывается (по адресу, формируемому в блоке 8 и передаваемому через соответствующий коммутатор 25
Далее, момент t соответствующий
или 26) номер NU, интервала. Tft, определяющий положение первого локального экстремума огибающей. По этому номеру из соответствующего модуля 28 или 29 в счетный блок 8 считывается массив, содержащий К дискретных значений из некоторой Ј -окрестности этого экстремума (адреса дискретных значений модифицируются в счетном блоке 8 и передаются через соответствующий коммутатор 30 или 31 прихода сигнала, в первом случае реализации точному положению первого локального экстремума, определяется в счетном блоке 8 по формуле t N3,-L + NMflKC, где NM01iC- номер мак симального дискретного значения в указанном массиве. В рассматриваемом случае значение t определяется с точностью 1 мкс, соответствующей частоте дискретизации входного сигнала. Максимальное дискретное значение фиксируется как амплитуда первого экстремума. Аналогично определяются амплитуда и временная координата второго экстремума. Интервал между экстремумами определяется как разность соответствующих временных координат. Согласно другому алгоритму для определения точногоi момента прихода сигнала могут использоваться его дискретные значения на интервале Т0 , соответствующем моменту обнаружения. В таком варианте эти значения сравниваются с порогом А0 обнаружения для определения момента его пересечения передним фронтом первой моды сигнала. Второй этап обработки сигнала акустической эмиссии завершается передачей его информативных параметров в блок 10 памяти.
В данном случае реализации устройства обеспечена возможность одновременного выполнения обоих этапов обработки сигналово Это достигается благодаря секционированности блоков 7 и 9, в которых запись данных о новом сигнале акустической эмиссии в соответствующие модули (например, 23 и 28) памяти может производиться одновременно с чтением данных о предыдущем сигнале из других модулей (2k и 29) памяти, а также вследствие
10
того, что первый этап обработки нового сигнала в блоке 6 может быть завершен не ранее, чем в конце паузы Тр, а этого достаточно для того, чтобы успеть выполнить второй этап обработки предыдущего сигнала в счетном блоке 8„
По значениям информативных параметров сигналов, принятых в нескольких каналах, в вычислительном блоке 11 вычисляют параметры событий акустической эмиссии. При этом, в частности вычисляют координаты источников сигналов, индуцированных этими событиями. Далее определяют, например, среднюю энергию четырех CHI- налов события по формуле
20
Е
AMQKCJ Е j 12
5
0
5
0
5
0
5
где А
макс
J
максимальное значение огибающей,
длительность сигнала, номера каналов в порядке прихода сигналов, а также другие характеристики событий акустической эмиссии и их. источников, необходимые для достижения конечных целей акустико- «эмиссионного: контроля. Результаты обработки индицируются и документируются в блоке 12 визуализации.
Использование изобретения позволяет повысить достоверность контроля, а также быстродействие при обработке информации и производительность контроля.
Формула изобретения
Многоканальное устройство для локации источника акустической эмиссии, содержащее несколько каналов, каж- дый из которых состоит из блока селекции и последовательно соединенных электроакустического преобразователя, усилителя и блока дискретизации и квантования, последовательно соединенные блок памяти, вычислительный блок и блок визуализации, выходы каналов подключены к соответствующим входам блока памяти, отличающееся тем, что, с целью повышения достоверности за счет обеспечения возможности обработки большего числа сигналов в реальном масштабе вре11
мени, в нем каждый канал снабжен сметным блоком, блоком хранения те- чущих значений сигнала, блоком хранения временных координат характерных точек сигнала и блоком определения значений огибающей, подключенным аходом к выходу блока дискретизации и квантования и к первому входу блока хранения текущих значений сигнала и выходом - к входу блока селекции, подсоединенного первым выходом к первому входу блока хранения временных координат характер™ ных точек сигнала, выход которого соединен с первым входом счетного блок, Ялоь селекции подсоединен
i
вторым выходом к вторым входам блока хранения временных координат характерных точек сигнала, блока хранения текущих значений сигнала и счетного блока, подключенного третьим входом к выходу блока хранения текущих значений сигнала, первым выходом - к третьму входу блока хранения временных координат характерных точек сигнала и вторым выходом - к третьему входу блока хранения текущих значений сигнала, а- третий выход счетного блока каждого;канала является выходом соответствующего канала.
10
15
E№J
.J
я
я
м
t
J
ш
оЛ
4
см «м
«
LI
Г
см
«i
I
ем
Г
к
г
5F
&
jiiiiiilU-llJiiiilL
llllllllllllllllllilHllliilllllllllllllllMllINlllll .
j
.J
la
