соединенные коммутатор, первый, второй и третий входы которого со-, единены с выходами трех регистров и являются первым, вторым и третьим выходами канала, регистровое арифметико-логическое устройство и блок памяти, выход которого соединен с четвертым входом коммутатора, и последовательно соединенные блок логики и управления, вход которого соединен с выходом регистрового арифметико-логического устройства, постоянное запоминающее устройство, второй выход которого соединен с пятым входом.коммутатора и схему сравнения, второй вход которой соединен с выходом четвертого регистра, а выход является четвертым выходом канала.
4. Система по п.1, отличающая с я тем, что блок вычисления координат и управления выполнен из р/4 каналов обработки, каждый из которых содержит микропроцессорное устройство, включающее последовательно соединенные коммутаторна четыре входа, являющихся входами канала, и первый интерфейс, опера-. тивное запоминающее устройство,второй интерфейс, выход которого является выходом канала обработки,и арифметический процессор, соединенный общей информационной магистраль с первым и вторым интерфейсами, оперативным и постоянным запоминающими устройствами, и микропроцесcQpa, входы которого соединены с соответствующими выходами каналов обработки, .первый выход является информационным выходом, а второй управляющим выходом блока вычислени координат и управления.






| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА РАДИОСВЯЗИ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ МУЛЬТИПЛЕКСИРОВАНИЕМ | 2005 |
|
RU2297721C2 |
| Устройство для определения местоположения источника акустической эмиссии | 1987 |
|
SU1499224A1 |
| Способ определения координат источника акустической эмиссии и устройство для его осуществления | 1987 |
|
SU1481673A1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2163391C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Устройство корреляционной обработки широкополосных сигналов | 1988 |
|
SU1619414A1 |
| Цифровое устройство доплеровской фильтрации | 1990 |
|
SU1830496A1 |
| Анализатор реовазосигналов для индикации наличия сосудов с нарушенной проходимостью | 1988 |
|
SU1602454A1 |
| Устройство для реализации двухмерного быстрого преобразования Фурье | 1982 |
|
SU1164730A1 |


1. МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ МНОЖЕСТВА ОДНОВРЕМЕННО ДЕЙСТВУНЯЦИХ ИСТОЧНИКОВ Aj{pfCTИЧECKИX СИГНАЛОВ, содержащая я каналов приема, каждый из которых состоит из последовательно соединенных акустического датчика, усилителя и фильтра, первый коммутатор и регистрирующее устройство, отличающаяся тем, что, с целью повышения достоверности определения координат, она снабжена подключенными к фильтрам каждого из каналов приема последовательно соединенными аналого-цифровым преобразователем и блоком памяти, выходы блоков памяти каналов соединены с соответствующими входами первого коммутатора, последовательно соединенными блоком вычисления m взаимокорреляционных функций, 2 m входов которого соединены с соответствующими выходами первого коммутатора, блоком определения разностей времени прихода и вторым коммутатором, последовательно соединенными блоком первичной отбраковки, р входов которого соединены с соответствующими выходами второго коммутатора, и блоком вычисления координат и управления, информационный выход которого соединен с регистрирующим устройством, а управляющий выход - с управляющими входами первого и второго коммутаторов. 2.Система поп.1, отличающаяся тем, что блок определения разностей времени прихода выполнен из m каналов, каждый из которых содержит последовательно соединенные первый блок памяти, вход которого является входом канала, и блок вычисления огибающей, выход которого соединен с вторым входом первого блока памяти, последовательно соединенные второй блок памяти, комму(Л татор, второй вход которого и первый вход второго блока памяти соединены . с выходом первого блока памяти, регистровое арифметико-логическое устройство, выход которого соединен с вторым входом второго блока памя| д ти, блок логики и управления и блок .памяти разностей времени прихода, выход которого является выходом ел tn-ro канала, и блок задания пределов,, iвыход которого соединен с вторым оо входом блока логики и управления, управляющие входы первого и второго блоков памяти, коммутатора и регистрового арифметико-логического устройства ,соединены с выходом блока логики и управления.. 3.Система поп.1,отличаю щ а я с я тем, что блок первичной отбраковки выполнен из р/4 каналов, содержащих четыре регистра, входы которых являются входами Р/4-ГО канала, последовательно
Изобретение относится к системам неразрушающего контроля, а именно к устройствам для определения местоположения на плоскости источников акустической эмиссии,и может быть использовано для определения координат дефектов в листовых материалах.
Цель изобретения - повышение достоверности определения координат.
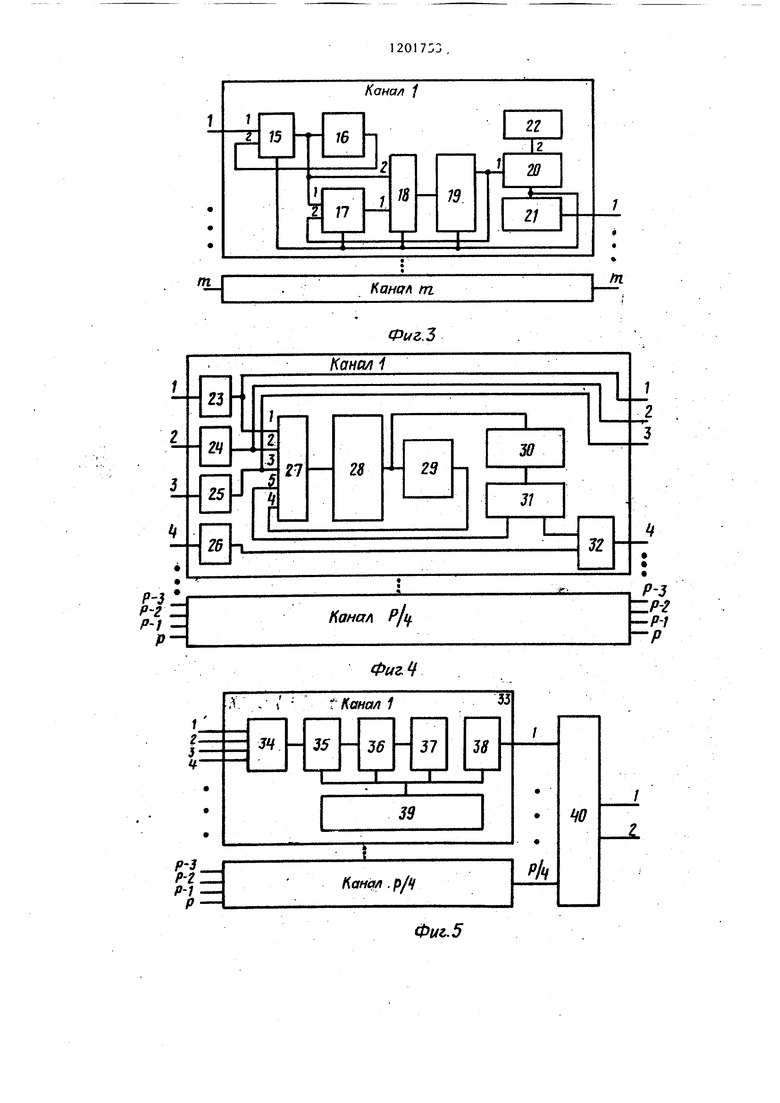
На фиг.1 изображена структурная схема системы; на фиг.2 - структурная схема блока вычисления ш взаимо- корреляционных функций; на фиг.З структурная схема блока определения разностей времени прихода; на фиг.4- структурная схема блока первичной отбраковки; на фиг.З - структурная схема блока вычисления координат и управления; на фиг.6 - расположение акустических датчиков на контролируемом объекте; на фиг.7 алгоритм работы m -го канала блока определения разностей времени прихода; на фиг.8 - алгоритм работы блока вычисления координат и управления.
Многоканальная система для определения координат множества одновременно действующих источников
акустических сигналов (фиг.1) содержит П каналов приема, каждый из которых состоит из последовательно соединенных акустического датчика 1, усилителя 2, фильтра 3, аналого-цифрового преобразователя (АЦП) 4 и блока 5 памяти, первый . коммутатор 6, II входов которого соединены с выходами блоков 5
памяти, последовательно соединенные блок 7 вычисления hi взаимокорреляционных функций, 2м входов которых соединены с соответствую щими выходами первого коммутатора 6
блок 8 определения разностей времени прихода и второй коммутатор 9, последовательно соединенные блок 10 первичной отбраковки, р/ входов которого соединены с соответствующи-
ь1и выходами,второго коммутатора 9, блок 11 вычисления координат и управления, управляющий выход которого соединен с управляющими входами первого и второго коммутаторов 6 и 9, и регистрирующее устройство 12.
Блок 7 вычисления ni взаимокорреляционных функций (фиг.2) выполнен из м каналов, каждьш из которых
содержит последовательно соединенны процессор 13 быстрого преобразования Фурье - обратного быстрого преобразования Фурье (БПФ-ОБПФ) первый и второй входы которого являются входами канала, и блок 14 формирования взаимного спектра, выход которого соединен с третьим входом
процессора 13 БПФ-ОБПФ, а вход является выходом канала.
Блок 8 определения разностей времени прихода (РВП) выполнен из HI каналов (фиг.З), каждый из которых содержит последовательно соединенные первый блок 15 памяти, вход которого является входом канала, и блок 16 вычисления огибающей, выход которого соединен с вторым входом первого блока 15 памяти, последовательно соединенные второй блок 17 памяти, коммутатор 18, второй вход которого и первый вход второго блока 17 памяти соединены с выходом первого блока 15 памяти, регистровое арифметикологическое устройство 19 (РАЛУ), выход которого соединен с вторым входом второго блока 17 памяти, блок 20 логики и управления и блок 21 памяти РВП, выход которого является выходом канала, и блок 22 задани пределов, выход которого соединен с вторьм входом блока 20 логики и управления, управляющие входы первого и второго блоков 15 и 17 памяти, коммутатора 18 и РАЛУ 19 соединены с выходом блока 20 логики и управления.
Блок 10 первичной отбраковки Сфиг.4) вьшолнен из Р/4 каналов, каждый из которых содержит четыре регистра 23 - 26, входы которых являются входами канала, последовательно соединенные коммутатор 27, первый, второй и третий входы которого соединены с выходами регистров 23 - 25 соответственно и являются первым, вторым и третьим выходами канала, РАЛУ 28 и блок 29 памяти, выход которого соединен с четвертым входом коммутатора 27, и последовательно соединенные блок 30 логики и управления, вход которого соединен с выходом РАЛУ 28, постоянное запоминающее устройство ( ПЗУ) 31, второй выход которого соединен с пятым входом комму -атора 27, и схему 32 сравнения, второй вход которо соединен с выходом четвертого регистра 26, а выход является четвертьм выходом канала.
Блок 11 вычисления координат и управления выполнен из Р/4 канало обработки (фиг.З), каждый из которых содержит микропроцессорное устройство 33, включающее последовательно соединенные коммутатор 34 на четыре входа, являющихся входами канала, и первьш интерфейс 35, оперативное запоминающее устройство (ОЗУ) 36, постоянное запоминающее устройство
(ПЗУ; 37, второй интерфейс 38, выход которого является выходом
канала обработки, и арифметический процессор 39, соединенный общей информационной магистралью с первым и вторым интерфейсами 35 и 38, ОЗУ 36 и ПЗУ 37, и микропроцессор 40, входы которого соеди0нены с выходами каналов обработки, первый выход является информационным выходом, а второй выход - управляЮ1ЦИМ выходом блока 11 вычисления координат и управления.
5
Система работает следующим образом.
Акустические датчики 1 размещены на поверхности контролируемого объекта на основе принципа создания t
0 различных групп датчиков (не менее двух), каждая из которых контролцрует k -ю зону контроля, определения разностей времени прихода сигналов на датчики и вычисления и от5браковки по аналитическим соотнощениям координат источников в каждой группе. Итоговые координаты определяют как общие для всех групп с заданной точностью. При этом коор0динаты ложных источников, образующихся от случайного сочетания РВП при переборе их комбинаций, меняются в зависимости от расположения датчиков, а координаты истинных
5
.источников не меняются, так как сигналы от них излучаются из одних и тех же точек.
На фиг.6 показаио расположение датчиков группами по четыре в фор0ме ромба, смещенных или повернутых относительно друг друга в выбранной системе координат X и V на величину д. Причем группы датчиков, охва тывающие одну и ту же зону контро5ля, располагаются исходя из условия уверенного приема сигналов источников из любой точки зоны контроля. Номера датчиков обозначены
через S и R , где 5 0,1,2,... номер столбца, а ,l,2,... -но мер строки (см. табл.и . .
Для датчиков, охватывающих зону контроля и образующих две группы относительно центрального датчика с номером S , R первая группа включает следующие номера датчиков: S, R-1; S+1,R; S,R+1;S-1,R; вторая группа S-I,R-1; S+1,R-1jS+1,R+1; S-1,R+1 (где S l,2...NS-2; R 1,2., , a N g и N R - соответ- ственно количество столбцов и строк и т.д. Угол поворота ® второй группы относительно первой равен 45°. Таким образом, из ti датчиков можно составить максимум (N,-2) ft(N,j-2) зон контроля.
При возникновении источников аку стических сигналов в контролируемом объекте (плоскость , излучающих как непрерывные, так и импульсные сигналы или их смесь, поверхностные-: волны напряжения, достигая акустические датчики 1 (фиг.1 , преобразуются в электрический сигнал, усиливаются усилителем 2, от-, фильтровываются фильтром 3, преобразуются АЦП 4 в цифровой код и запоминаются в блоке 5 памяти в каждом из h каналов. Фильтр 3 вьшолняет функцию частотной селекции сигналов и ограничения его спектра частотой |„/2 (где igL 2П.-частота дискретизации; . щирина спектра отфильтрованного сигнала). Блок 5 памяти служит для хранения информации на время проведения всех дальнейших операций по вычислению координат источников. Совокупность блоков 5 памяти по каналам приема позволяет получить временную фотографию сигналов в точках приема за заданный интервал времени Т. Интервал времени Т выбирается из условия:
Т макс.|(РВП).
для всех зон контроля. С другой стороны максимальное значение РВП определяется геометрией расположения преобразователей. Объем блока 5 памяти определяется как Т/&Т (где 4Та - период дискретизации/.
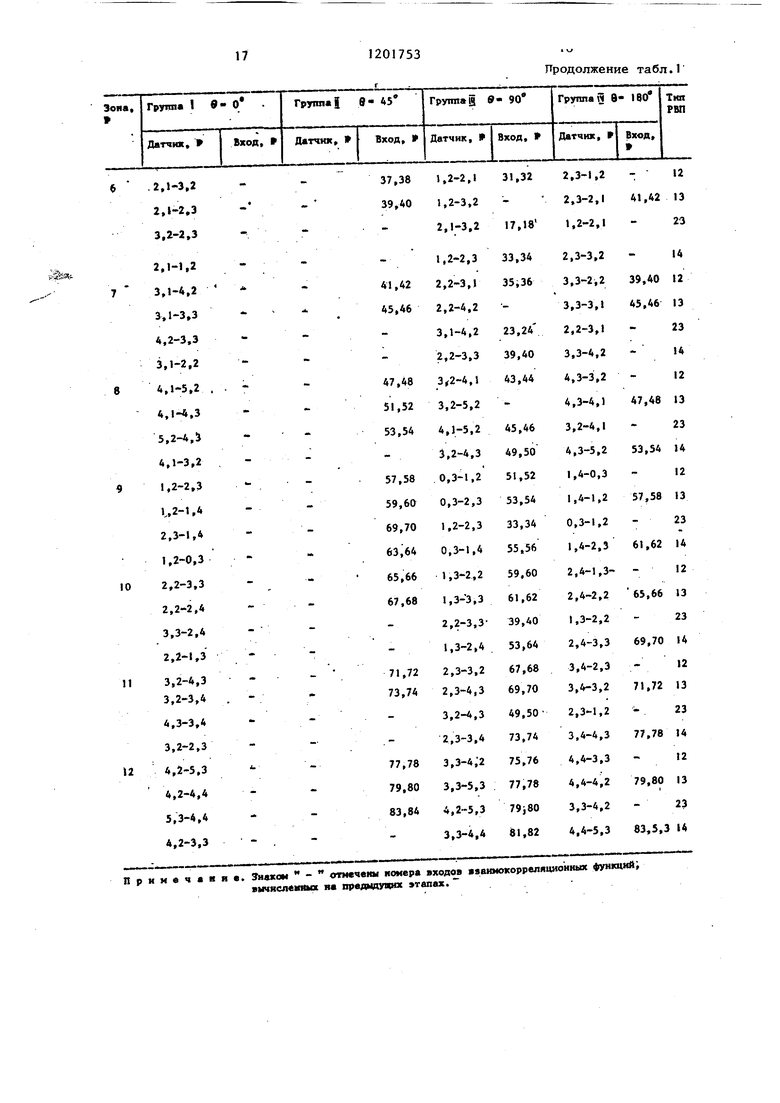
Выход блока 5 памяти каждого канала приема соединен посредством первого коммутатора 6 с соответствующим входом блока 7 вычисления m взаимокорреляционных функций. Основное требование коммутации заключается в том, что при нумерации акустических датчиков 1 в пределах группы начиная с вершины по часовой стрелке одноименные РВП различных групп одной зоны контроля поступают на одноименньй канал обработки в блоке 10 первичной отбраковки. Соединение каналов приема с входами блока 7 вычисления взаимокорреляционной функции для четырех групп расположения датчиков в каждой зоне (фиг.6 приведено в табл.1 с учетом того, что в Смежных зонах . имеются общие взаимокорреляционные функции. Данные табл.1 справедливы для и датчиков. Управление первым коммутатором 6 осуществляется по командам из блока 11 вычисления и управления. Дальнейшая работа устройства производится циклически для каждой группы датчиков отдельно I.
Вычисление взаимокорреляционных
функций производится блоком 7, выполненным в виде Ж параллельных каналов, каждьй из которых представляет собой коррелятор, состоящий из процессора 13 БПФ-ОБПФ и блока 14 формирования взаимного спектра, (фиг.2) реализующий косвенньй метод вычисления взаимокорреляционной функции двух сигналов как обратное преобразование Фурье от взаимной спектральной плотности, вычисляемой как прямое преобразование Фурье от входных сигналов. Использование данной структуры коррелометра с применением цифрового процессора 13 БПФ-ОБПФ поточного типа на современной элементной базе позволяет получить высокую скорость вычисления взаимокорреляционной функции (время выполнения элементарной операции БПФ 0,8-1 мкс) при большой точности
Вычисление взаимокорреляционной функции в каждом канале производится следз ющим образом.
По входным сигналам, представляющим комплексные числа,
z(n) х(п) + jy(n),
где х(п) - сигнал первого входа
коррелятора;
у(п) - сигнал второго входа коррелятора. вычисляется прямое преобразование Фурье в процессоре 13 БПФ-ОБПФ. Z (К) 0 (z U)} где ф - функция преобразования Фур отрезка данных комплексных точек; К - номер гармоник. Взаимный спектр вычисляется в блоке 14 формирования взаимного спектра согласно соотношениям: х(К) I z(K) + z(N-K); у(К) i (K) - z(N-K); Gxy(K) г x(K). y(K), где - знак комплексного сопряжения ; N - размерность БПФ. Взаимный спектр СК) поступает на третий вход процессора 13 БПФОБПФ, в котором осуществляется обратное преобразование Фурье. Выход ной массив процессора 13 БПФ-ОБПФ в этом случае является оценкой вза мокорреляционной функции. Число каналов hi блока 7 вычисле ния взаимокорреляционных функций для выбранного расположения акусти ческих датчиков 1 и алгоритма опре ления координат с учетом общих взаимокорреляционньк функций между зонами определяется по соотношению m (N5-2)(NR-2)-4-(Ns-3). (N Массив значений взаимокорреляци онных функций поступает в блок 8 определения РВП (фиг.З, выполненн в виде (ti параллельных каналов, и накапливается в первом блоке 15 памяти соответствующего канала. Дл симметричной осциллирующей относительно оси абсциссы взаимокоррел ционной функции, характерной для сигналов определенного типа дефектов , вычисляется огибающая этой функции. Для этого значения взаимо корреляционной функции In-го канала в дальнейшем последовательно считьшаются из первого блок 15 памяти в блок 16 вычисления огибающей, определяющий максимальн значение каждой осцилляции xyCf)) которое вновь записьшается в первый блок 15 памяти. В результате такой обработки в первом блоке 15 памяти фиксируется огибающая R;( у С ) Для прочих типов ) вычисление огибающей не происходит.Режим вычисления огибающей устанавливается предварительно на основе априорных знаний о типе дефектов. Дальнейшая работа блока 8 определения РВП в каждом канале заключается в отыскании локальных максимумов RXV) при этом координата f локального максимума является РВП с учетом шага дискретизации и скорости распространения волн в материале. Алгоритм работы Yn -го канала блока 8 определения РВП представлен на фиг,7. В основу определения координат локальных максимумов положен принцип сравнения высоты максимума относительно соседних минимумов. В случае, если высота максимума больше заданной величины , то это локальный максимум; если меньше - локальное возмущение типа шум. Величина позволяет регулировать чувствительность метода. Для обеспечения работоспособности алгоритма в начальных точках первьш элемент массива ЯХ:У() хранимого в первом блоке 15 памяти, приравнивается заведомо минимальному значению, например 10 . На фиг.7 приняты следующие обозначения: с - номер цикла; (N +1)объем первого блока 1 5 памяти (. массив i значение i-го эле; 4T,uTi мента массива чение текущей высоты максимума; Д1, Л 2 - значение глобальной высоты максимума; Р, ММ - ячейка второго блока 17 памяти, содержащая значение глобального минимума; К.МЖ - ячейка Btoporo блока 17 памяти, содержащая значение текущего минимума; RMXT ячейка второго блока памяти, содбржащая значение текущего максимума; - знак присвоения или равенства. Исходными данными является массив значений RXV i) А-, с первым элементом А (1) Ю (блок 1, фиг.7). Анализ состояния блоков канала и управление их работой осуществляется по командам блока 20 логики и управления. На начальном этапе алгоритма обработки организуется циклическая процедура (блоки 2 и 3, фиг,7): блок 20 логики и управления проверяет текущий адрес
первого блока 15 памяти. Если он равен объему памяти, т.е. N+1, то работа канала обработки прекращается, если нет,то из блока 15 памяти через второй вход коммутатора 18 в РАЛУ 19 последовательно вводятся значения А- и РАЛУ 19 вычисляет дТ , (блок 6, фиг.7. Затем в РАЛУ 19 вводится значение элемента памяти блока 15 с адресом А и вычисляется дТ А, А . Значения дТ , ДТ вводятся в блок 20 логики и управления, в котором анализируются их знаки (блок 7, фиг.7 J. В случае, если знак не изменяется, цикл повторяется со значением ( L+1. В противт ном случае анализируется изменение знаков при дТ (блок 8, фиг.7). Изменение знаков с + на - соответствует текущему максимуму, при этом в блоке 20 логики и управления фиксируется значение номера цикла i , например, в регистре J , а в ячейкеRМХТ второго блока 17 памяти - значение А( (блок 9, фиг.7 и вновь запускается циклическая процедура. Изменение знаков с - на + соответствует текущему минимуму, при этом в ячейке Ц ММТ блока 17 фиксируется значение А, (блок 10, фиг.7). Далее посредством коммутатора 18 выход второго блока 17 памяти соединяется с входом РАШ 19, в которое вводятся значения из ячеек (ММ,МХТ и RMMT. РАЛУ 19 последовательно определяет величину Д1 RMM - RMXT и А2 R МХТ .-RMMT (блок 11, фиг. 7).
Далее значения & ,Л2 и величина из блока 22 задания пределов последовательно поступают на вход блока 20 логики и управления, в котором производятся следующие операции: сравнивается абсолютная величина Л1 со значением (блок 12 фиг.7). Если |Д1| , то производится сравнение &2| с С блок и, фиг.7;. При |Л2| в ячейке ft,ММ фиксируется значение А-,;, (блок 14, фиг.7), а в блоке 21 памяти РВП значение регистра J , которое является значением величины РВП в отсчетах (блок 15, фиг.7), и вновь запускается цикл (блок 2, фиг.7). При &.2I (. работа канала обработки переводится на начало дакла. Если значение (Д1| , то проверяется отношение (Д2| 7(.блок 16, фиг.7): если Да, тов ячейке RММ второго блока 17 памяти фиксируется значение ячейки RMMT (блок 1 7.фиг.7) , и вновь запускается цикл блок 2 фиг, 7) ; если Нет, то коммутатор 18 соединяет выход второго блока 17 памяти с входом РАЛУ 19, в которое считываются значения ячеек RММ и RMMT и J производится их сравнение: ВММ хВММГ(блок 18, фиг.7). Результат сравнения поступает в блок 20 логики и управления,который анализирует результат и в случае Да фиксирует в ячейке RMM значение ячей5
ки R. ММТ (блок 19, фиг.7) . Впротивном случае запускается цикл с последующим значением шага 1 1+ 1 (блок 2, ,иг.7).
Таким образом, в результате обработки содержимого первого блока 15 памяти в блоке 21 памяти РВП накапливаются значения абсцисс локальных максимумов взаимокорреляционной функции.
5
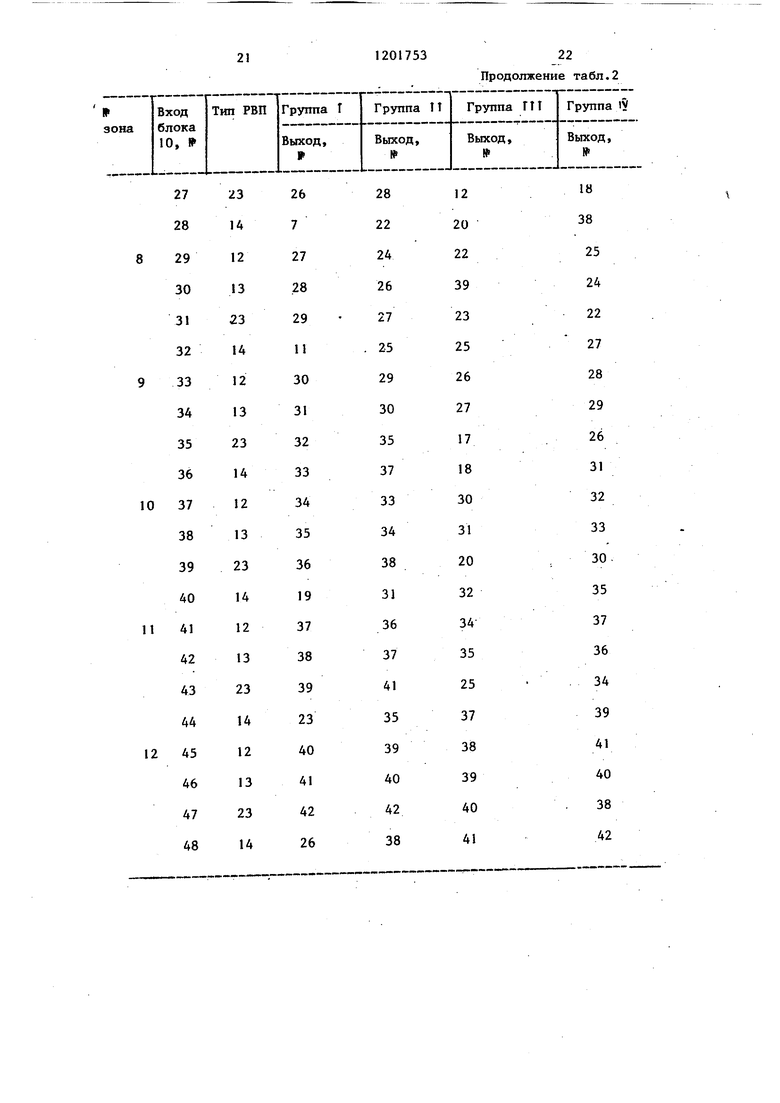
Далее информация с блока 8 определения РВП поступает через второй коммутатор 9 на блок 10 первичной отбраковки (фиг.1. Второй коммутатор 9 обеспечивает прохождение четырех РВП t -и группы датчиков К-и зоны на свой канал первнчной отбраковки.. Закон взаимосвязи рассчитан заранее для известного расположения датчиков, групп и зон на объек- .
5 те. Для расположения акустических датчиков I, показанного на фиг.6, закон соответствия приведен в табл.2.
Блок 10 первичной отбраковки
0 вьшолнен в виде Р/4 параллельных каналов (фиг.4), число которых для выбранного способа размещения датчиков и алгоритма определения координат равно числу зон контроля.
5 На четыре входа каждого канала блока 10 первичной отбраковки поступают РВП 12, 13, 23 и 14 (где 12,13,... - номера преобразователей в пределах каждой группы и каждой
0 зоны контроля). Нумерация ведется от вершины ромба по ходу часовой стрелки, а группа от группы отличается углом поворота. Исходными данными для ; работы блока являются указанные
5 значения РВП, хранящиеся в соответствующих блоках 21 памяти РВПЩ-го канала блока 8 РВП (фиг.З). Например, для первой группы датчиков
П
первой зоны (табл.2; РВП 12, 13, 23и 14 хранятся в блоках 21 памяти РВП соответственно 1 - 4-го канала, для второй группы 1,3,6 и 4-го канала и т.д. Блок 30 логики и управления (фиг.4 циклически формирует всевозможные комбина1;ии адресов- блоков памяти с РВП 12 и 13, значения которых записьшаются в регистры 23 - 25 соответственно (цикл по ( j и последовательно формирует адреса блока памяти с РВП 14 значения которых записьшаются в регистр 26 (цикл поj)
В каждом цикле по i посредством коммутатора 27 вход РАЛУ 28 последовательно соединяется с выходами блоков 31, 23, 24 и 25, при этом из ПЗУ 31 в РАЛУ 28 вводятся предельные значения РВП рассматриваемой зоны. При каждом вводе в РАЛУ 28 РЕП вычисляется.соотношение:
|РВП12,13... I РВПпр,.оп
Результат поступает в блок 30 логики и управления, в котором анализируются полученные данные . В .случае, если для какой-то из РВП соотношение не вьтолняется, адрес блока 21 памяти данной РВП увеличивается на 1, а содержимое переписьшается в соответствующий регистр 23-25. В случае неравенства для всех трех РВП коммутатор 27 последовательно вводит в РАЛУ 28 значения РВП с регистров 23 и 25. РАЛУ 28 вычисляет сумму РВП12 +
+ PBII23 Sj, которая заносится в блок 29 памяти. Далее коммутатор 27 вводит в РАЛУ 28 значения РВП с регистра 24 и значение Sj из блока памяти 29. РАЛУ 28 вычисляет S РВП13 Sji . Результат заносится в блок 29 памяти. Далее коммутатор 27 вводит в РАЛУ 28 значение Sj, из блока памяти 29 и значение точности g из ПЗУ 31. РАЛУ 28 вычисляет соотношение I Si, I .Результат поступает в блок 30 логики и управления. В случае соблюдения неравенства комбинация РВП удовлетворяет критерию первичной отбраковки и
считается:. истинной, а их значения поступают на выход данного канала отбраковки. В противном случае блок 30 логики и управления увеличивает значения адресов блоков 21 памяти с РВП12, и 13 на 1 и цикл по
0175312
повторяется. В каждом цикле по j блок 30 логики и управления формирует текущий адрес блока 21 памяти с РВП14, значения которой заносятся в регистр 26. Значение РВП с регистра 26 поступает.на схему 32 сравнения кодов. Одновременно из ПЗУ 31 на второй вход схемы 32 сравнения кодов поступает предельно допустимое значение РВП14. Схема 32 сравнения кодов проверяет соот|ношение:
. РВП14 ,„„
В случае неравенства значение РВП14 поступает на выход канала. В противном случае блок 30 логики и . управления увеличивает значение текущего адреса блока памяти 21 с РВП14 на 1 и цикл по j повторяется. Предельные-значения циклов
по 1 и j определяются размерностями соответствующих блоков 21 памяти РВП. Значение f выбирается исходя из предельной аппаратурной ошибки определения РВП и обычно равно шагу дискретности аргумента взаимокорреляционной функции. Аналогичные процедуры совершаются и в остальных каналах блока 10 первичной отбраковки. По истечению циклов по i и J блок готов к отбраковке массивов РВП следующей группы преобразователей.
Значения РВП, удовлетворяющие критерию первичной отбраковки, поступают с выходов блока 10 первичной отбраковки на вход блока 11 вычисления координат и управления, который состоит из Р/4 параллельных каналов обработки, каждый из которых реализован в виде микропроцессорных устройств 33 (фиг.5. Четыре входа каждого канала обработки соединены с четырьмя выходами одноименного канала блока 10 первичной отбраковки.
Комбинации РВП12,13,23 и 14 обра батьшаемой группы датчиков поступают на входы канала обработки и последовательно вводятся посредством
.коммутатора 34 и интерфейса 35 в канал микропроцессорного устройства 33. Под воздействием микропрограммы, зашитой в ПЗУ 37, указанные РВП
5 накапливаются в ОЗУ 36 в виде массивов РВП12,13,23 и 14 размерностью Т,У,К,М слов.. Данные массивы явля ются исходными для проведения даль13нейших операций. При этом адрес местонахождения РВП13 и 14 в соот ветствующшс массивах равен значени этих РВП, смещенному на величину N для отрицательных значений РВП (гд N размерность преобразования БПФ|ОБПФ блока 7 вычисления Щ взаимокорреляционных функций). Это исклю чает перебор всех комбинаций РВП. Дальнейшая обработка производится в соответствии с микропрограммой, защитой в ПЗУ 37 и реализующей представленный на фиг.8 алгоритм обработки. При этом арифметико-лог ческие операции производятся арифметическим процессором 39. Обработка производится циклически в пределах циклов по i и j . В каждом цикле составляются комбинации из РВП12 и 23 (блок 3, фиг.8). Вычисл ется адрес местонахождения значени РВП13 (блок 4, фиг.8): и А + В (где А РВП12, В РВП23). i fU при и О; .ADR13 ju+N при и : О. Из-за неточности аппаратурного определения РВП13 производится пои РВП13 в его массиве в окрестности АДР13. На каждом шаге поиска прове ряется соотношение: 1и-РВП13| i где б - точность первичной отбрако ки (блок 5, фиг.В. По тройке РВП, удовлетворяющих неравенству, производится вычисление координат X и V предполагаемог источника и его РВП14 в выбранной системе координат с началом коорди нат в центре ромба по уравнениям (блок 6, фиг.8): 4D - А - В, S 2Е - 2D - В - А + 2СВ; К - + CVAD - 1; М FN1/4E + CS/4D ; Р Nl/16E + -М + /М - 4КР RU 2К ., 2F.R + N1 X 5g ; С(,С - 2R) 25 R, - /Y + (Е + Xf ; 314 где А РВП12; В РВП23; С РВП13; D расстояние от центра ромба до вершины; Е - расстояние от центра ромба до бокового датчика. Для расчетного значения РВП14 рассчитывается адрес местонахождения РВП14 в его массиве: AhRU - ДВП14 для РВП14 0; - 1РВП14 + N для РВП14 0. В окрестности AI)R14 производится поиск РВП14, удовлетворяющей неравенству: (РВШ4 - РВП141 , , где точность вторичной отбраковки (блок 7, фиг.8. В случае отсутствия такого РВП14 происходит возврат на начало циклов по i ,j. В случае указанного неравенства рассчитанные координаты фиксируются в ОЗУ 36 в массивах X и V (блок 8, фиг.8 J. По окончанию перебора РВП12 и 23, что соответствует расчету координат 1-й группы датчиков, микропроцессором 40 формируется команда управления первому и второму коммутаторам 6 и 9 на установление соединений, соответствующих следующей группы датчиков. Работа блоков 7,8,10 и И повторяется с той разницей, что для остальных групп координаты источников накапливаются в массивах х , . В результате расчета координат 1-й и 2-й групп преобразователей происходит совмещение их координат (блока 9 фиг.8). Операция совмещения массивов координат происходит следующим образом. Для каждого элемента массивов X и у просматривается массив х , у , при этом проверяются соотношения: (X - х1 «У - Y , где х у точность совмещения. Координаты хну , удовлетворякнцие приведенному соотношению помещаются в массивах х ну в порядке их следования. Для 3-й группы датчиков расчет овторяется и т.д. В результате пределения координат и проведения перации совмещения для последней группы датчиков в массивах х и v блока 1I вычисления координат и управления находятся итоговые источники, которые через интерфейс 38 считьшаются в микропроцессор 40 и выводятся на регистрирующее устройство 12. После окончания обработки информации, хранимой в блоках 5 памяти (фиг.1 для требуемого числа групп датчиков, запускается следующий цикл работы рассматриваемого устройства в цело Динамика работы системы, оцениваем как способность определять наты перемещающихся или возникающих на объекте дефектов со скоро тью NMCT единицу времени, определяется интервалом времени пропуска информации, ипя рассматриваемого варианта устройства п« kv где - время расчета координат и совмещения; - число групп. Таким образом, предлагаемое устройство вследствие выявления локальных максимумов каждой взаимокорреляционной функции позволяет определять координаты множества одновременно действующих как импульсных, так и непрерывных источников акустических сигналов. Применение корреляционного метода определения координат позволяет повысить достоверность результатов, так как при приеме некоррелируемого щума вза-. имокорреляционная функция между сигналами равна нулю, а ложные максимумы отсутствуют. Т«блица1 Примечаияс.
Продолжение табл.1 7н«хом - отмечены номера входов вавимокорреляционных функций; вмчяслемямс яа предндучих этапах.
Т а.блица 2
Фиг. 2
Ч
1
4ШИ
2
J
«
Р-2
Р-1 -
р -
т
KantfA т
Фиг.З
Фиг.Ц
Фиг,. 5
| Волошина В.И | |||
| и др | |||
| Акустический определитель местоположения развивающегося дефекта.- Дефектоскопия, 1980, № 8, с.69-74 | |||
| Многоканальное устройство для контроля координат развивающихся трещин | 1980 |
|
SU1046673A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
