Изобретение относится к гидрометрии и предназначено для определения расхода воды в открытых незаиляемых руслах симметричного сечения, работаюи х в бесподпорном режиме на прямолинейном участке канала.
Цель изобретения - уменьшение времени определения расхода воды.
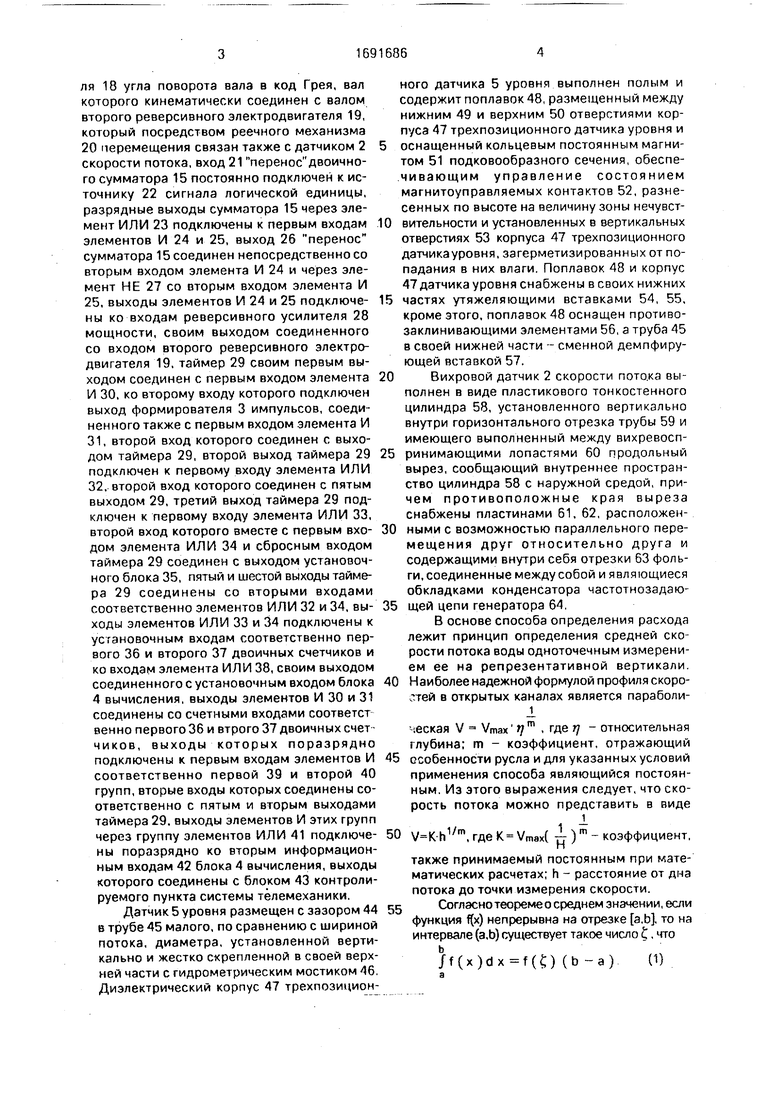
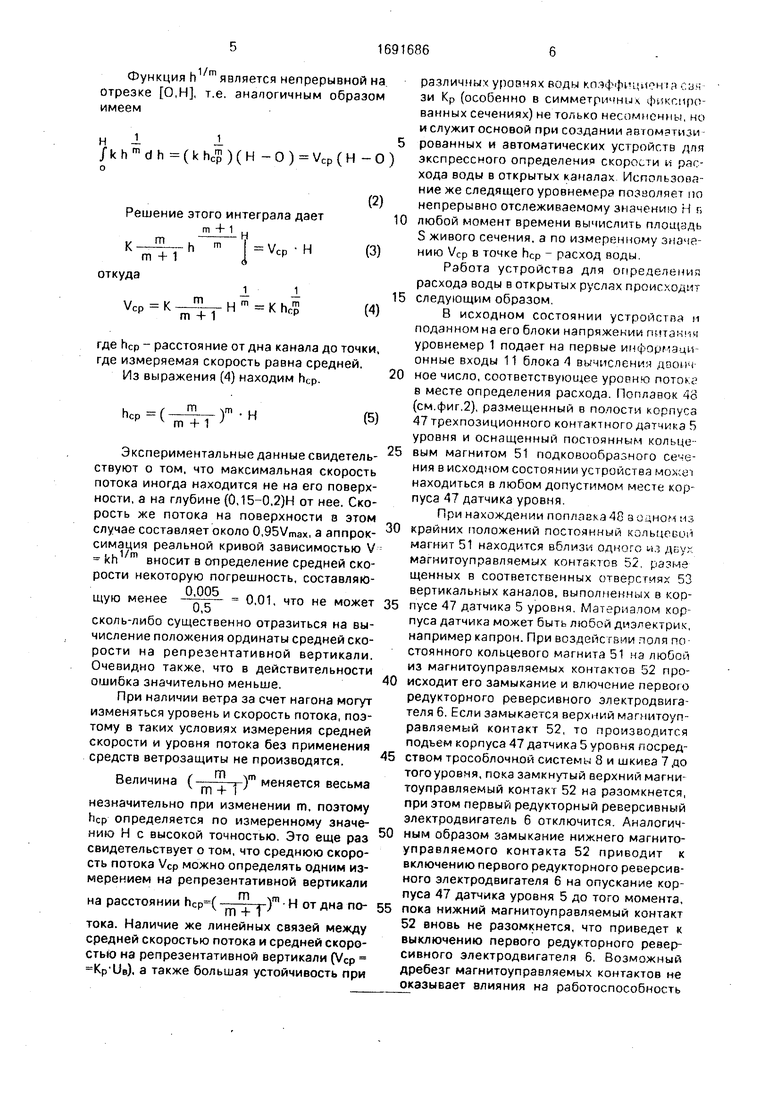
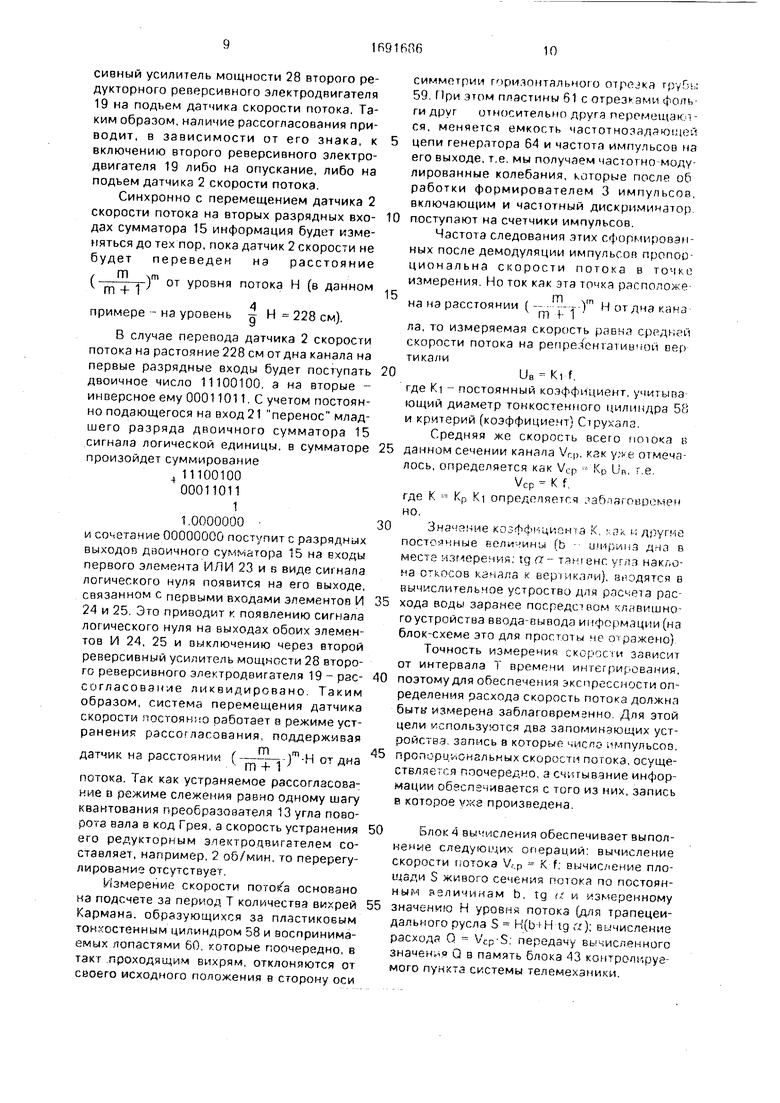
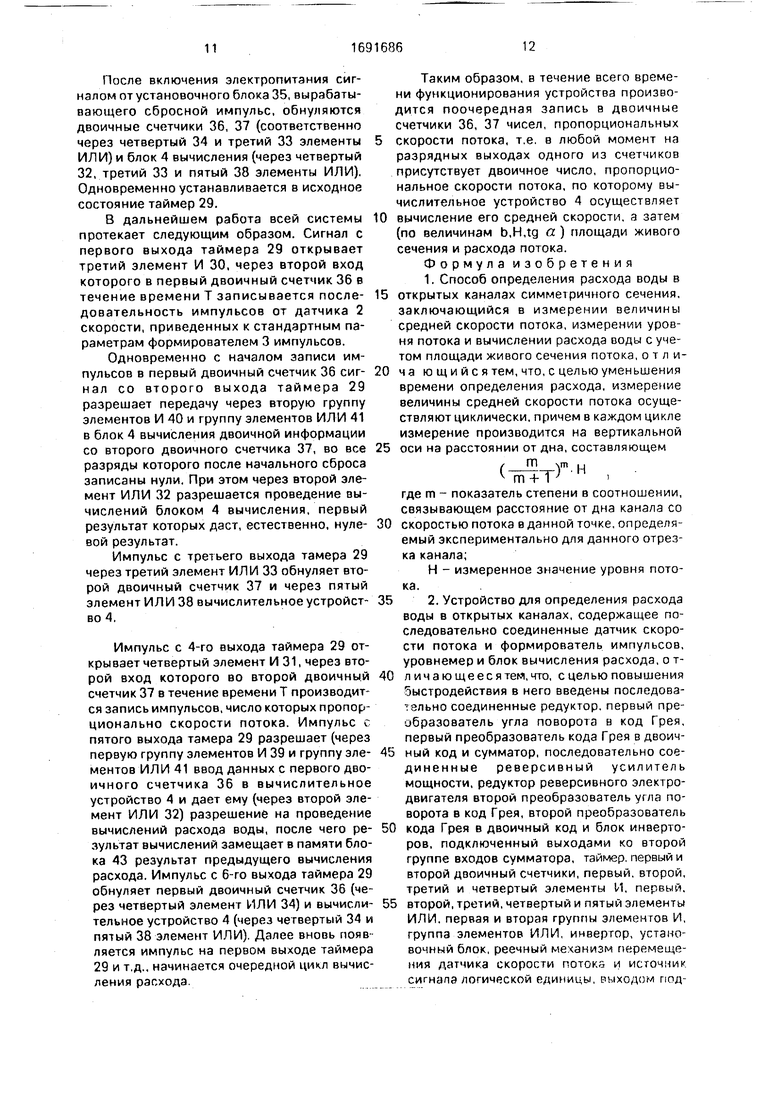
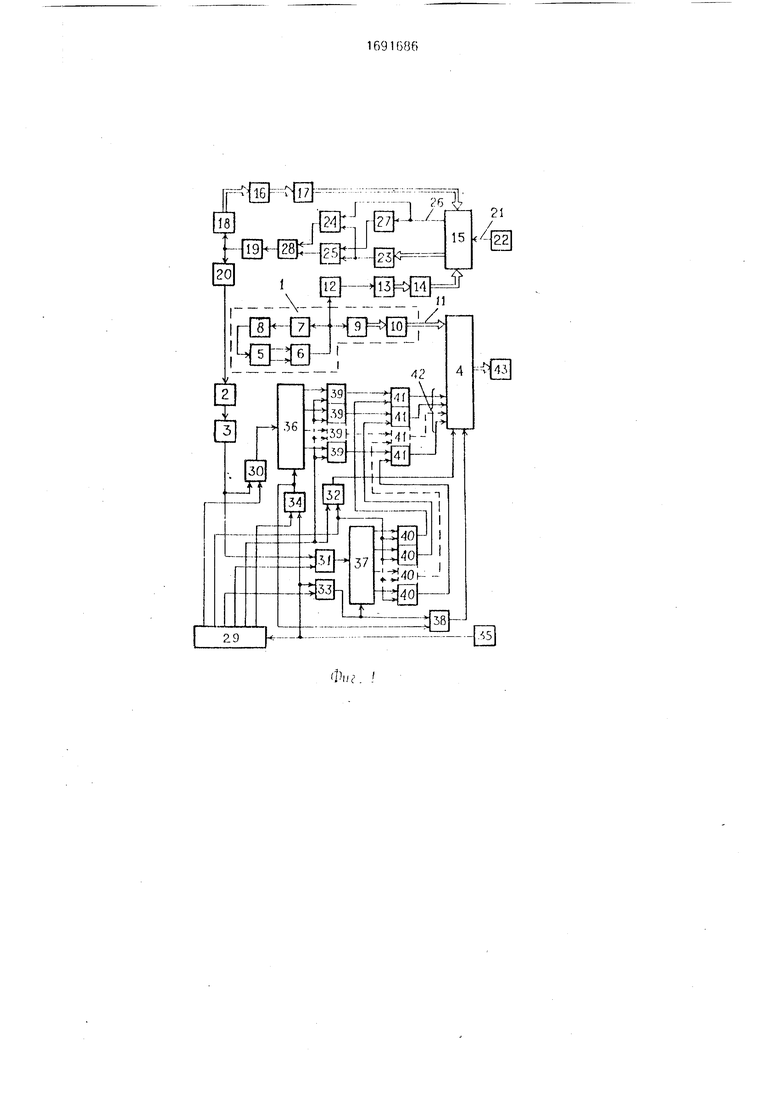
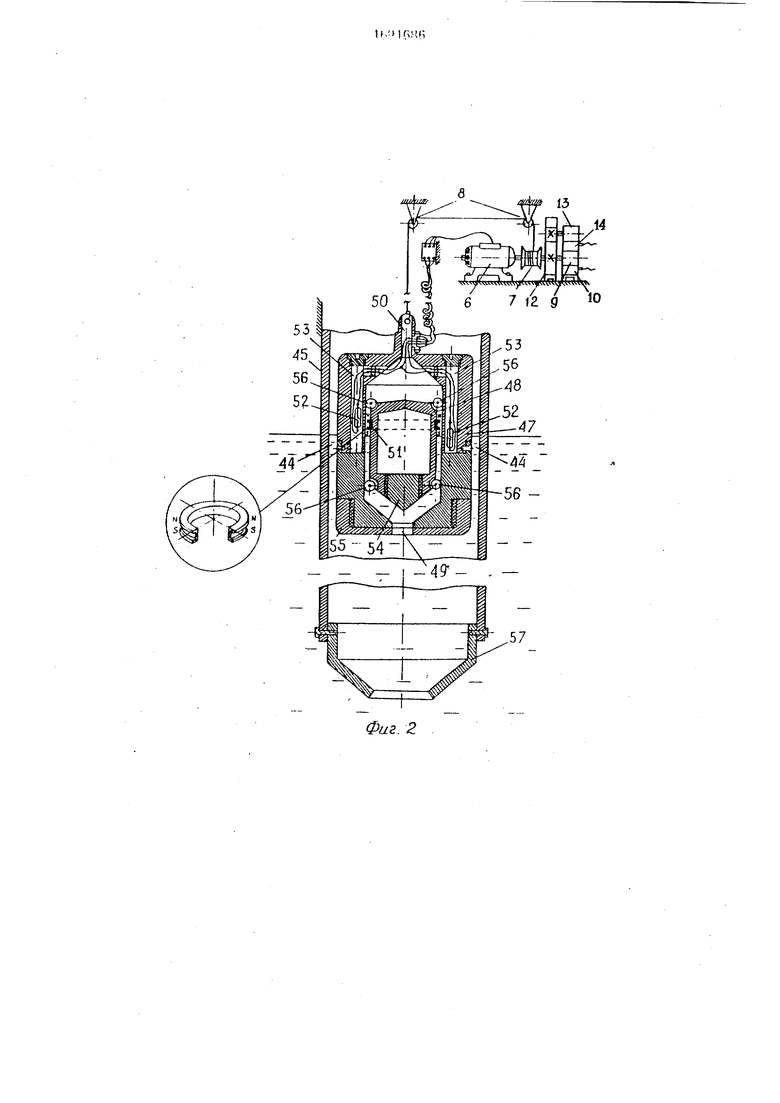
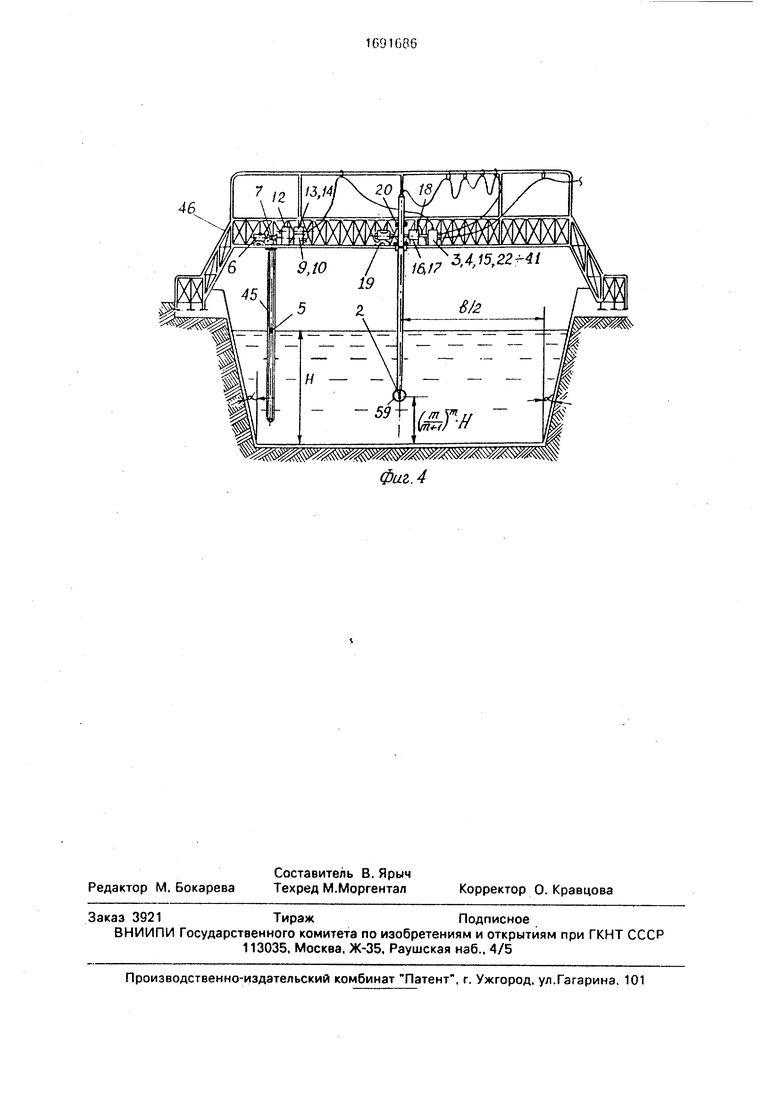
На фиг. 1 представлена блок-схема устройства для определения расхода воды; на фиг.2 - конструкция датчика уровня в кинематической схеме следящего уровнемера; на фиг.З - конструкция датчика скорости потока; на фиг.4 - общая схема расстановки элементов устройства для определения расхода.
Устройство для определения расхода воды содержит уровнемер 1 датчик 2 скорости потока, своим выходом соединенный с формирователем 3 импульсов, блок 4 вычис- лениа величины расхода, датчик 5 уроння потока, электрически соединенный с управляющими входами реверсивного электро двигателя 6, вал которого кинематически связан через шкив 7 и трособлочную систему 8 с корпусом датчика 5 уровня, а таь же с валом преобразователя 9 угла поворота вала в код Грея, разрядные выходы которого через преобразователь 10 кода Греч в двоичный код соединены с первыми информационными входами 11 блока 4 вычисления, а через редуктор 12 с коэффициентом переf m + 1 ,т дачи ( ) вал этого же электродин
гателя б кинематически связан с вап м второго преобразователя 13 угла псворгна вала в код Грея разрядные выходы юторого через преобразователь 14 кода I роя в двоичный код подведены к нервы р трчдным входам сумматора 15 вторые разрядные входы которого череэ последовлтрчьно соединенные преооразователь 16 кода Грея и двоичным код и опок 17 инвертора
ЧеНЫ К ПЫлРДйИ , П0 1ТП
О
о
о
00 0
ля 18 угла поворота вала в код Грея, вал которого кинематически соединен с валом второго реверсивного электродвигателя 19, который посредством реечного механизма 20 перемещения связан также с датчиком 2 скорости потока, вход 21 перенос двоичного сумматора 15 постоянно подключен к источнику 22 сигнала логической единицы, разрядные выходы сумматора 15 через элемент ИЛИ 23 подключены к первым входам элементов И 24 и 25, выход 26 перенос сумматора 15 соединен непосредственно со вторым входом элемента И 24 и через элемент НЕ 27 со вторым входом элемента И 25, выходы элементов И 24 и 25 подключены ко входам реверсивного усилителя 28 мощности, своим выходом соединенного со входом второго реверсивного электродвигателя 19, таймер 29 своим первым выходом соединен с первым входом элемента И 30, ко второму входу которого подключен выход формирователя 3 импульсов, соединенного также с первым входом элемента И
31,второй вход которого соединен с выходом таймера 29, второй выход таймера 29 подключен к первому входу элемента ИЛИ
32,второй вход которого соединен с Пятым выходом 29, третий выход таймера 29 подключен к первому входу элемента ИЛИ 33, второй вход которого вместе с первым входом элемента ИЛИ 34 и сбросным входом таймера 29 соединен с выходом установочного блока 35, пятый и шестой выходы таймера 29 соединены со вторыми входами соответственно элементов ИЛИ 32 и 34, выходы элементов ИЛИ 33 и 34 подключены к установочным входам соответственно первого 36 и второго 37 двоичных счетчиков и ко входам элемента ИЛИ 38, своим выходом соединенного с установочным входом блока 4 вычисления, выходы элементов И 30 и 31 соединены со счетными входами соответст венно первого 36 и втрого 37 двоичных счет- чиков, выходы которых поразрядно подключены к первым входам элементов И соответственно первой 39 и второй 40 групп, вторые входы которых соединены соответственно с пятым и вторым выходами таймера 29. выходы элементов И этих групп через группу элементов ИЛИ 41 подключены поразрядно ко вторым информационным входам 42 блока 4 вычисления, выходы которого соединены с блоком 43 контролируемого пункта системы телемеханики.
Датчик 5 уровня размещен с зазором 44 в трубе 45 малого, по сравнению с шириной потока, диаметра, установленной вертикально и жестко скрепленной в своей верхней части с гидрометрическим мостиком 46. Диэлектрический корпус 47 трехпозиционного датчика 5 уровня выполнен полым и содержит поплавок 48, размещенный между нижним 49 и верхним 50 отверстиями корпуса 47 трехпозиционного датчика уровня и
оснащенный кольцевым постоянным магнитом 51 подковообразного сечения, обеспечивающим управление состоянием магнитоуправляемых контактов 52, разнесенных по высоте на величину зоны нечувст0 вительности и установленных в вертикальных отверстиях 53 корпуса 47 трехпозиционного датчика уровня, загерметизированных от попадания в них влаги. Поплавок 48 и корпус 47 датчика уровня снабжены в своих нижних
5 частях утяжеляющими вставками 54, 55, кроме этого, поплавок 48 оснащен противо- заклинивающими элементами 56, а труба 45 в своей нижней части - сменной демпфирующей вставкой 57.
0Вихровой датчик 2 скорости пото.ка выполнен в виде пластикового тонкостенного цилиндра 58, установленного вертикально внутри горизонтального отрезка трубы 59 и имеющего выполненный между вихревосп5 ринимаюицими лопастями 60 продольный вырез, сообщающий внутреннее пространство цилиндра 58 с наружной средой, причем противоположные края выреза снабжены пластинами 61, 62, расположен0 ными с возможностью параллельного перемещения друг относительно друга и содержащими внутри себя отрезки 63 фольги, соединенные между собой и являющиеся обкладками конденсатора частотнозадаю5 щей цепи генератора 64.
В основе способа определения расхода лежит принцип определения средней скорости потока воды одноточечным измерением ее на репрезентативной вертикали.
0 Наиболее надежной формулой профиля скоростей в открытых каналах является параболи- j
веская V Vmax ijm , где rj - относительная глубина; m - коэффициент, отражающий 5 особенности русла и для указанных условий применения способа являющийся постоянным. Из этого выражения следует, что скорость потока можно представить в виде
j
0 h1/m, где К Vm8x( ) m - коэффициент,
также принимаемый постоянным при математических расчетах; h - расстояние от дна потока до точки измерения скорости. 5 Согласнотеоремео среднем значении, если функция f(x) непрерывна на отрезке а.Ь, то на интервале (а,Ь) существует такое число Ј, что
/f(x)(Ј) (b-a) 0)
Функцияh mявляется непрерывной на отрезке 0,Н, т.е. аналогичным образом имеем
1
1
Н -1J.5
/khmdh(khc)(H - О ) Vcp ( Н - О )
о
Решение этого интеграла дает
m + 1 m
Н
К h m I Vcp H m + 1d
откуда
Vcp К H m К tv p1
где hcp - расстояние от дна канала до точки, где измеряемая скорость равна средней.
Из выражения (4) находим hep.
icp
-t01 v
( m +T )
H
щую менее
0,5
Экспериментальные данные свидетель- ствуют о том, что максимальная скорость потока иногда находится не на его поверхности, а на глубине (0,15-0,2)Н от нее. Скорость же потока на поверхности в этом случае составляет около 0,95Vmax, а аппроксимация реальной кривой зависимостью V kh1/m вносит в определение средней скорости некоторую погрешность, составляю- 0,005
0,01, что не может
сколь-либо существенно отразиться на вычисление положения ординаты средней скорости на репрезентативной вертикали. Очевидно также, что в действительности ошибка значительно меньше.
При наличии ветра за счет нагона могут изменяться уровень и скорость потока, поэтому в таких условиях измерения средней скорости и уровня потока без применения средств ветрозащиты не производятся. т т +
незначительно при изменении т, поэтому hep определяется по измеренному значению Н с высокой точностью. Это еще раз свидетельствует о том, что среднюю скорость потока Vcp можно определять одним измерением на репрезентативной вертикали
m vn
Величина (
-)m меняется весьма
на расстоянии hCp-(
-)т Н от дна по-
тока. Наличие же линейных связей между средней скоростью потока и средней скоростью на репрезентативной вертикали (VCp KP |JB), а также большая устойчивость при
5
)
10
15
20
30
35
40
45
50
55
различных уроачях воды кпэфф1Ч{н н1я- а- зи Кр (особенно в симметричны v фиксированных сечениях) не только несомненны, но и служит основой при создании автомзгизи рованных и автоматических устройств для экспрессного определения скорости и par- хода воды в открытых каналах Использование же следящего уровнемера позволяет по непрерывно отслеживаемому значению Н г, любой момент времени вычислить площчдь S живого сечения, а по измеренному значению VCp в точке hcp расход воды
Работа устройства для определений расхода воды в открытых руслах происходит следующим образом
В исходном состоянии устройств и поданном на его блоки напряжении пигакчч уровнемер 1 подает на первые инфорпзци онные входы 11 блока 4 вычисления двсшч ное число, соответствующее урорню потока в месте определения расхода. Поплавок 4о (см.фиг,2), размещенный в полости корпуса 47 трехпозиционного контактного датчика 5 уровня и оснащенный постоянным кольцо вым магнитом 51 подковообразного се -е- ния в исходном состоянии устройства MOVSI находиться в любом допустимом месте корпуса 47 датчика уровня
При нахождении поплавка 48 а одном мз крайних положений постоянный кольцевой магнит 51 находится вблизи одного m дьух магиитоуправлчемых контактов 52 рэзме щенных в соответственных отверстиях 53 вертикальных каналов, выполненных в корпусе 47 датчика 5 уровня. Материаюм кор пуса датчика может быть любой диэлектрик, например капрон. При всздейс гвии лоля по стоянного кольцевого магнита 51 на любой из магнитоупразляемых контактов 52 происходит его замыкание и влючсние первого редукторного реверсивного электродвигателя 6. Если замыкается верхний магнитоуп- равляемый контакт 52, то производится подъем корпуса 47 датчика 5 уровня посредством трособлочной системы 8 и шкива 7 до того уровня, пока замкнутый верхний магни- тоуправляемый контакт 52 на разомкнется, при этом первый редукторный реверсивный электродвигатель 6 отключится. Аналогичным образом замыкание нижнего магнито- управляемого контакта 52 приводит к включению первого редукторного реверсивного электродвигателя 6 на опускание корпуса 47 датчика уровня 5 до того момента, пока нижний магнитоуправляемый контакт 52 вновь не разомкнется, что приведет к выключению первого редукторного реверсивного электродвигателя 6. Возможный дребезг магнитоуправляемых контактов не оказывает влияния на работоспособность
электродвигателя, являющегося инерционным звеном. Точность измерения уровня определяется шириной зоны нечувствительности трехпозиционного контактного датчика уровня 5 и зависит от ши- рины кольцевого постоянного магнита 51 и расстояния, на которое разнесены между собой магнитоуправляемые контакты 52. В данном случае погрешность измерения уровня составляет ± 0,3 см.
Вал первого реверсивного электродвигателя б кинематически связан с валом преобразователя 9 угла поворота вала в код Грея, в свою очередь соединенного с преобразователем 10 кода Грея в двоичный код, выходы которого поразрядно подключены к первым информационным входам 11 блока 4 вычисления. Поэтому на этих входах постоянно присутствует двоичное число, соответствующее уровню Н потока.
Кроме того, вал первого редукторного реверсивного электродвигателя 6 также кинематически через редуктор 12 с коэф, л
фициентом передачи (---)т (в общем
случае) связан с валом преобразователя 13 угла поворота вала в код Грея, своими выходами связанного со входами преобразователя 14 кода Грея в двоичный код, на разрядных выходах которого также постоянно будет присутствовать двоичное число, соответствующее, в общем случае,
m
m +
будет присутствовать на первых входах сумматора 15.
При включении системы датчик 2 скорости потока необязательно находится в точке потока, ордината которой соответствует( --i-)m от уровня Н потока, Для дальнейшего объяснения работы устройства необходимо выбрать значение коэффици ентз т. Для простоты примем m 2. Тогда
(---г) Положим, что при включении
ГП т 1 У
устройства уровень Н составлял 513 см. Предположим также, что датчик скорости 2 находился, например, на расстоянии 235см от дна потока, что в двоичном виде соответствует числу 11101011. Именно это число будет присутствовать на выходе преобразователя 16 кода Грея в двоичный. Блок 17 инверторов преобразует это число в инверсное 00010100. Как уже указывалось, на первых разрядных входах сумматора 15 присутствует число, соответствующее (тт)1 N или о 513
228 (в двоичном виде 11100100). На вторых
(
-)т-Н . Это число также постоянно
0
5
0
5
0
5
0
5
0
5
разрядных входах двоичного сумматора 15 присутствует число 00010100 а на вход 21 перенос младшего разряда двоичного сумматора 15 от источника 22 постоянно подается сигнал логической единицы. В результате суммирования на выходах двоичного сумматора 15 получим: 00010100 +11100100
1
0.11111001
Знак О слева от запятой означает появление на выходе 26 перенос старшего разряда двоичного сумматора 15 сигнала логического нуля, который поступает на вто- ро вход первого элемента И 24. и проинвер- тированный элементом НЕ 27 в сигнал логической единицы, - на второй вход второго элемента И 25. На первые же входы обоих элементов И 24, 25 подается сигнал логической единицы с выхода первого элемента ИЛИ 23, на входы которого с разрядных выходов двоичного сумматора 15 поступает число 11111001, полученное в результате операции суммирования. Поскольку на обоих входах элемента И 25 присутствуют сигналы логической единицы, то этот сигнал с выхода элемента И 25 через реверсивный усилитель 28 мощности включит второй реверсивный электродвигатель 19 на опускание датчика скорости потока. Если же датчик скорости будет при включении системы находиться на расстоянии, например, 200 см от дна потока, что в двоичном виде соответствует числу 11001000, а в инверсном виде - 00110111, то при суммировании в двоичном сумматоре 15 получим
00110111
11100100 1
1.00011100
Единица слева от запятой означает появление на выходе 26 перенос старшего разряда двоичного сумматора сигнала логической единицы. Этот сигнал подается на второй вход первого элемента И 24 и в виде сигнала логического нуля (вследствие инверсии элементом НЕ 27) - на второй вход второго элемента И 25. На вторые входы этих элементов с выхода первого элемента ИЛИ 23 поступает сигнал логической единицы, поскольку на его входы с разрядных выходов двоичного сумматора подается число 00011100.
Наличие на обоих входах элемента И 24 сигналов логической единицы приводит к тому, что сигнал логической единицы si на выходе элемента И 24, что, Р свою очередь, приводит к включению ерез цоярр
f +
сивный усилитель мощности 28 второго ре- дукторного реверсивного электродвигателя 19 на подъем датчика скорости потока. Таким образом, наличие рассогласования приводит, в зависимости от его знака, к включению второго реверсивного электродвигателя 19 либо на опускание, либо на подъем датчика 2 скорости потока.
Синхронно с перемещением датчика 2 скорости потока на вторых разрядных входах сумматора 15 информация будет изменяться до тех пор, пока датчик 2 скорости не будет переведен на расстояние
-)т от уровня потока Н (в данном
m
(m -f 1
4 примере - на уровень Н 228 см).
В случае перевода датчика 2 скорости потока на растояние 228 см от дна канала на первые разрядные входы будет поступать двоичное число 11100100, а на вторые - инверсное ему 00011011. С учетом постоянно подающегося на вход 21 перенос младшего разряда двоичного сумматора 15 сигнала логической единицы, в сумматоре произойдет суммирование 4 11100100 00011011 1
1.0000000
и сочетание 00000000 поступит с разрядных выходов двоичного сумматора 15 на входы первого элемента ИЛИ 23 и в виде сигнала логического нуля появится на его выходе, связанном с первыми входами элементов И 24 и 25, Это приводит к появлению сигнала логического нуля на выходах обоих элементов И 24, 25 и выключению через второй реверсивный усилитель мощности 28 второго реверсивного электродвигателя 19 - рассогласование ликвидировано. Таким образом, система перемещения датчика скорости постоянно оаботает в режиме устранения рассогласования, поддерживая
датчик на расстоянии ()1 от дна
потока. Так как устраняемое рассогласование в режиме слежения равно одному шагу квантования преобразователя 13 угла поворота вала в код Грея, а скорость устранения его редукторным зтектроцвигателем составляет, например, 2 об/мин, то перерегулирование отсутствует.
Измерение скорости потока основано на подсчете за период Т количества вихрей Карманз. образующихся за пластиковым тонкостенным цилиндром 58 и воспринимаемых лопастями 60, которые поочередно, в так г проходящим вихрям, отклоняются от своего исходного положения в сторону оси
симметрии горизонтального отрезка гру
г...
59. При этом пластины 61 с отрезками Фоль ги друг относительно друга перемещайся, меняется емкость частотнозадрющей
5 цепи генератора 64 и частота импульсов на его выходе, т.е. мы получаем частотно модулированные колебания, которые после об работки формирователем 3 импульсов, включающим и частотный дискриминатор
0 поступают на счетчики импульсов.
Частота следования этих сформированных после демодуляции импульсов пропорциональна скорости потока в точке измерения. Но ток как эта точка распаложе
5, in уп ,,
на на расстоянии ( - --,- ) Н от дна кана
ла, то измеряемая скорость равна средней скорости потока на репрезентативной вер тикали
0UB - Ki f.
где Ki - постоянный коэффициент, учитыва ющий диаметр тонкостенного цилиндра 58 и критерий (коэффициент) Струхала.
Средняя же скорость всего потока в
5 данном сечении канала Vr(. как отмечалось, определяется как VCp KD Un, r e
Vcp - К f
где К - Кр KI определяется ,аблзгоероме но.
0Значащие ксс-ФФ цион а К, ак и другие
постоянные величины (Ь ширина дна в месте измерения; tg а- тчнгенг. углз наклона откосов кзмяяа к вершк.чли), вводятся в вычислительное устроство для расчета рас5 хода воды заранее посредством клавишного устройства ввода-вывода информации (на блок-схеме это для простоты че о ражено) Точность измерения сксртои зависит от интервала Т времени интегрирования.
0 поэтому для обеспечения экспрессиости определения расхода скорость потока должна быть измерена заблаговременно Для этой цели используются два запоминающих устройства запись а которые число импульсоо.
5 пролорш-.снальмых скорости потока, осуществляется поочередно, а считывание информации обеспечивается с того из них, запись в которое произведена.
0Блок 4 вычисления обеспечивает выполнение следующих операций: вычисление скорости потока V;p К f; вычисление площади S живого сечения потока по постоянным величинам b, tg / и измеренному
5 значению Н уровня потока (для трапецеидального русла S К(Ы Н ig а); вычисление расхода О - V cp-S; передачу вычисленного значение Q в память блока 43 контролируемого пункта системы телемеханики.
После включения электропитания сигналом от установочного блока 35,вырабатывающего сбросной импульс, обнуляются двоичные счетчики 36, 37 (соответственно через четвертый 34 и третий 33 элементы ИЛИ) и блок 4 вычисления (через четвертый 32, третий 33 и пятый 38 элементы ИЛИ). Одновременно устанавливается в исходное состояние таймер 29.
В дальнейшем работа всей системы протекает следующим образом. Сигнал с первого выхода таймера 29 открывает третий элемент И 30, через второй вход которого в первый двоичный счетчик 36 в течение времени Т записывается последовательность импульсов от датчика 2 скорости, приведенных к стандартным параметрам формирователем 3 импульсов.
Одновременно с началом записи импульсов в первый двоичный счетчик 36 сигнал со второго выхода таймера 29 разрешает передачу через вторую группу элементов И 40 и группу элементов ИЛИ 41 в блок 4 вычисления двоичной информации со второго двоичного счетчика 37, во все разряды которого после начального сброса записаны нули. При этом через второй элемент ИЛИ 32 разрешается проведение вычислений блоком 4 вычисления, первый результат которых даст, естественно, нулевой результат.
Импульс с третьего выхода тамера 29 через третий элемент ИЛИ 33 обнуляет второй двоичный счетчик 37 и через пятый элемент ИЛИ 38 вычислительное устройство 4.
Импульс с 4-го выхода таймера 29 открывает четвертый элемент И 31, через второй вход которого во второй двоичный счетчик 37 в течение времени Т производится запись импульсов, число которых пропорционально скорости потока. Импульс с пятого выхода тамера 29 разрешает (через первую группу элементов И 39 и группу элементов ИЛИ 41 ввод данных с первого двоичного счетчика 36 в вычислительное устройство 4 и дает ему (через второй элемент ИЛИ 32) разрешение на проведение вычислений расхода воды, после чего результат вычислений замещает в памяти блока 43 результат предыдущего вычисления расхода. Импульс с 6-го выхода таймера 29 обнуляет первый двоичный счетчик 36 (через четвертый элемент ИЛИ 34) и вычислительное устройство 4 (через четвертый 34 и пятый 38 элемент ИЛИ). Далее вновь появляется импульс на первом выходе таймера 29 и т.д., начинается очередной цикл вычисления расхода.
Таким образом, в течение всего времени функционирования устройства производится поочередная запись в двоичные счетчики 36, 37 чисел, пропорциональных
скорости потока, т.е. в любой момент на разрядных выходах одного из счетчиков присутствует двоичное число, пропорциональное скорости потока, по которому вычислительное устройство 4 осуществляет
0 вычисление его средней скорости, а затем (по величинам b,H,tg a ) площади живого сечения и расхода потока.
Формула изобретения
1. Способ определения расхода воды в
5 открытых каналах симметричного сечения, заключающийся в измерении величины средней скорости потока, измерении уровня потока и вычислении расхода воды с учетом площади живого сечения потока, о т л и0 ч а ю щи и с я тем, что, с целью уменьшения времени определения расхода, измерение величины средней скорости потока осуществляют циклически, причем в каждом цикле измерение производится на вертикальной
5 оси на расстоянии от дна, составляющем еГП ул . ,
(т+Т} н .
где m - показатель степени в соотношении, связывающем расстояние от дна канала со
0 скоростью потока в данной точке, определяемый экспериментально для данного отрезка канала;
Н - измеренное значение уровня потока.
5 2. Устройство для определения расхода воды в открытых каналах, содержащее последовательно соединенные датчик скорости потока и формирователь импульсов, уровнемер и блок вычисления расхода, о т0 л ичающеесятем.что, с целью повышения быстродействия в него введены последова- тзльно соединенные редуктор, первый преобразователь угла поворота в код Грея, первый преобразователь кода Грея в двоич5 ный код и сумматор, последовательно соединенные реверсивный усилитель мощности, редуктор реверсивного электродвигателя второй преобразователь угла поворота в код Грея, второй преобразователь
0 кода Грея в двоичный код и блок инверторов, подключенный выходами ко второй группе входов сумматора, таймер, первый и второй двоичный счетчики, первый, второй, третий и четвертый элементы И, первый.
5 второй, третий, четвертый и пятый элементы ИЛИ. первая и вторая группы элементов И, группа элементов ИЛИ, инвертор, установочный блок, реечный механизм перемещения датчика скорости потока и источник сигнапэ логической единицы, выходом ппдключенный ко входу перенос сумматора, группой выходов подключенного через первый элемент ИЛИ к первым входам первого и второго элементов И, выход перенос сумматора подключен ко второму входу пер- вого элемента И непосредственно, а ко второму входу второго элемента И - через инвертор, выходы первого и второго элементов И подключены ко входам реверсивного усилителя мощности, выход установочного блока подключен к установочному входу таймера, к первому входу третьего и четвертого элементов ИЛИ, выходы которых подключены соответственно к входам сброса первого и второго двоичных счетчиков и ко входам пятого элемента ИЛИ, подключенного к первому входу блока вычисления, вторым входом подключенного к выходу второго элемента ИЛИ, первый выход таймера подключен к первому входу третьего элемента И, второй выход таймера соединен с первым входом второго элемента ИЛИ и со стробирующим входом первой группы элементов И, третий выход таймера соединен со вторым входом третьего эле- мента ИЛИ, четвертый выход таймера подключен к первому входу четвертого элемента И, пятый выход таймера соединен с первым входом второго эяемента ИЛИ и со стробирующим входом второй группы элементов И, шестой выход таймера соединен со вторым входом четвертого элемента ИЛИ, выход формирователя импульсов подключен ко вторым входам третьего и четвертого элементов И, выходы которых соединены со счетными входами первого и второго двоичных счетчиков соответственно, информационные выходы которых подключены соответственно ко входам первой и второй групп элементов И, выходы кото- рых соединены с соответствующими группами входов группы элементов ИЛИ, выходы которой подключены к первой группе информационных входов блока вычисления, вторая группа информационных входов
которого подключена к информационным выходам уровнемера, кинематически связанного с редуктором, редуктор реверсивного электродвигателя кинематически через реечный механизм перемещения связан с датчиком скорости потока, причем уровнемер выполнен в виде последовательно соединенных датчика уровня, реверсивного электродвигателя, преобразователя угла поворота в код Грея и преобразователя кода Грея в двоичный код. а вал реверсивного электродвигателя связан сдатчиком уровня через шкив и трособлочную систему.
3.Устройство по п.2, отличающее- с я тем, что датчик уровня выполнен в виде поплавка, снабженного кольцевым постоянным магнитом и утяжеляющей вставкой в своей нижней части и размещенного в герметичном корпусе, который, в свою очередь, размещен в вертикальной трубе малого диаметра, жестко скрепленной своей верхней частью с гидрометрическим мостиком, а в нижней части содержащей сменную демпфирующую вставку, в вертикальных отверстиях корпуса датчика уровня установлены магнитоуправляемые контакты, разнесенные по высоте на ширину зоны нечувствительности.
4.Устройство по п.2, отличающее- с я тем, что датчик скорости потока выполнен в виде пластикового тонкостенного цилиндра, установленного вертикально внутри горизонтального отрезка трубы и имеющего выполненный между вихревосп- ринимающими лопастями продольный вырез, сообщающий внутреннее пространство цилиндра с наружной средой, причем противоположные края выреза снабжены пластинами, расположенными с возможностью параллельного перемещения друг относительно друга и содержащими внутри себя отрезки фольги, соединенные между собой и являющиеся обкладками конденсатора ча- стотнозадающей цепи генератора.
ст
1C

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЛИВА | 1992 |
|
RU2044470C1 |
| Система измерения и регулирования толщины листового материала | 1985 |
|
SU1354165A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Устройство для определения направления и угла поворота вращающегося объекта | 1991 |
|
SU1786441A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Цифровой интегральный термометр | 1990 |
|
SU1758449A1 |
| Автоматизированная система полива | 1984 |
|
SU1250217A1 |
| Многокоординатное устройство для управления | 1987 |
|
SU1522155A1 |
| ЦИФРОВОЙ ИНТЕГРАЛЬНЫЙ ТЕРМОМЕТР | 1991 |
|
RU2027156C1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
Изобретение относится к гидрометрии и позволяет уменьшить время, затрачивав мое на определение расхода воды в открытых каналах. Датчик скорости потока следящим образом удерживается но определенном расстоянии от дна канала, зависящего также и от изменяющегося уровня потока Расход потока воды вычисляется с помощью блока вычисления, в который вводится значение скорости потока и его урон- ня. Динамика потока практически не изменяется, поскольку датчик скорости и датчик уровня выполнены мало;збаритны- ми 2с и 2 з п. ф-лы, 4 ил
Фиг. 2
59
19
46
.4
| Заявка ФРГ № 3207357, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
