Изобретение относится к области робототехники и к станкостроению и может найти широкое применение при .управлении промьшшенными механизмами, в которых необходимо высокоточное регулирование как по положению, так и по скорости в широком диапазоне, как, например, в станках с программным управлением, роботах и манипуляторах.
Цель изобретения - расширение диапазона регулирования по скорости, повышение быстродействия и динамическо точности электропривода.
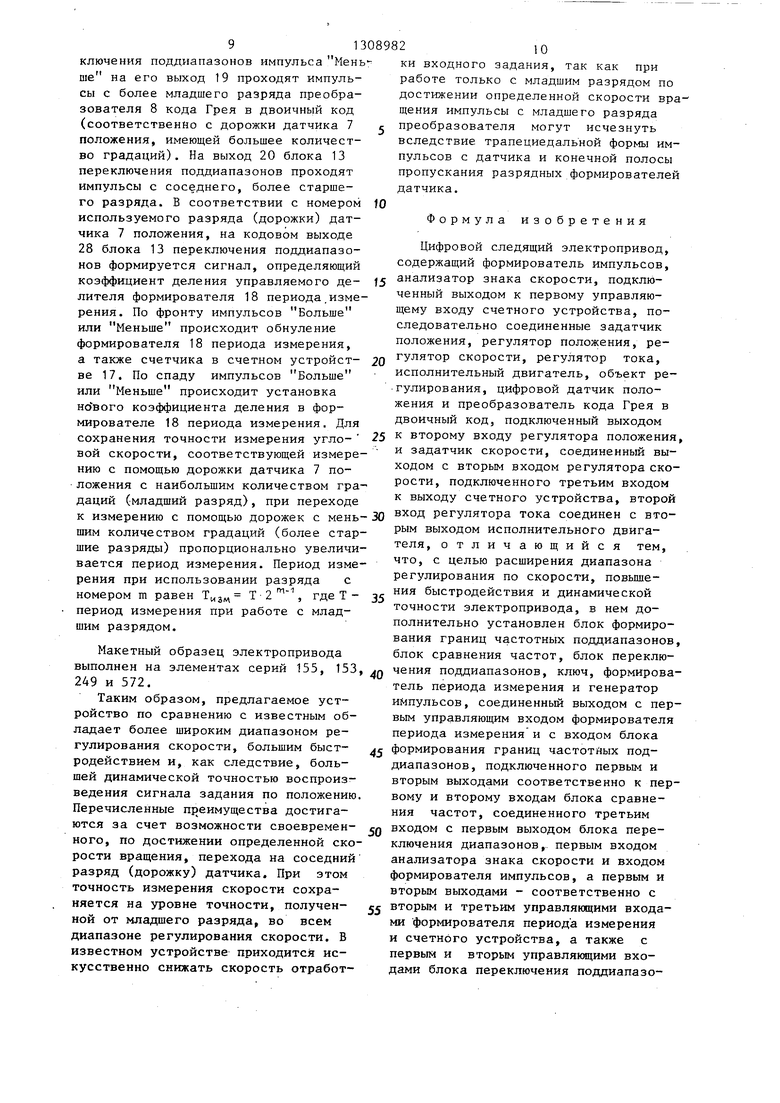
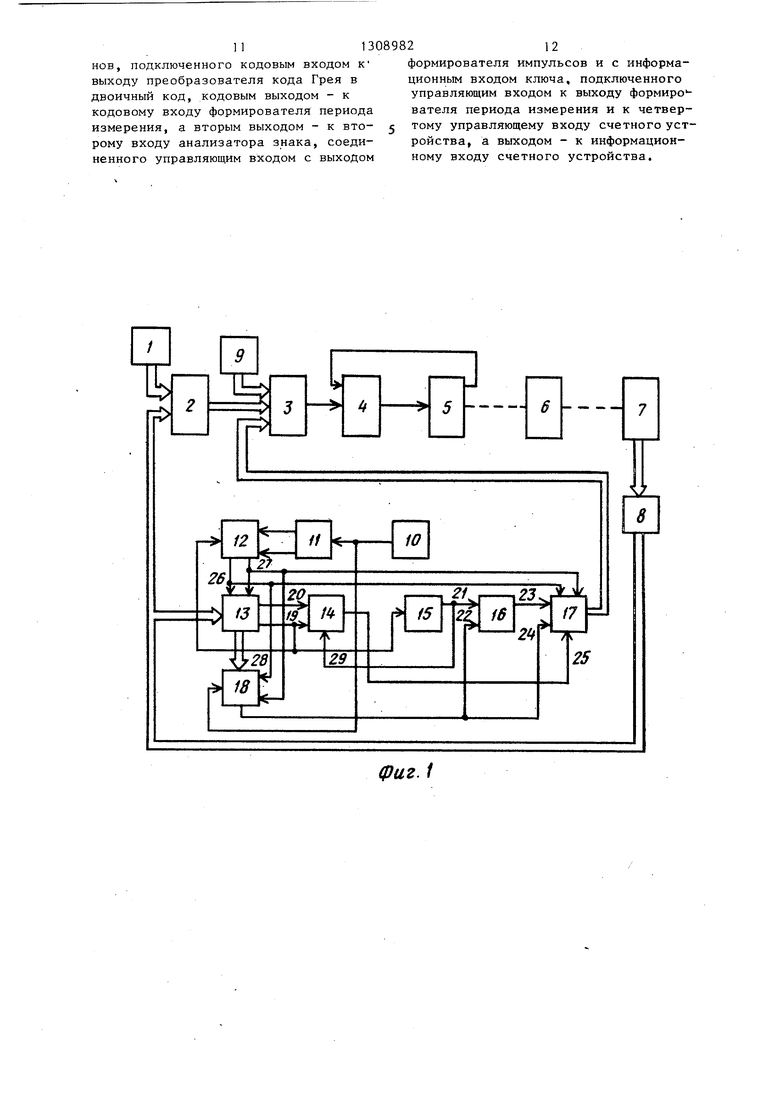
На фиг. 1 дана функциональная схема электропривода; на фиг. 2 - принципиальная электрическая схема анализатора знака.
Предлагаемый электропривод (фиг.1 содержит цифровой задатчик 1 положения, регулятор 2 положения, подчиненный ему регулятор 3 скорости, которому подчинен регулятор 4 тока, совмещенный с усилителем мощности, , исполнительный двигатель 5, объект 6 регулирования, механически связанный с ним цифровой датчик 7 положения, преобразователь кода Грея в двоичный код 8, задатчик 9 скорости, ге- нератор 10 импульсов опорной частоты блок 11 формирования границ частотных поддиапазонов, блок 12 сравнения частот, блок 13 переключения поддиапазонов (разрядов) датчика 7 положения, анализатор 14 знака скорости, формирователь 15 импульсов (удвоитель частоты), формирующий короткие импульсы в моменты времени, соответствующие фронтам и спадам им- пульсов, поступающих на его вход, ключ 16, счетное устройство 17 (измеритель частоты), представляющее собой счетчик импульсов с возможностью обнуления, соединенный с ре- гистром памяти, формирователь 18 периода измерения, представляющий собой управляемый делитель частоты, первый и второй выходы 19 и 20 блока 13 переключения поддиапазонов, ин- формационный и управляклций входы 21 и 22 ключа 16, информационньй,чет- вертый и первый управляющие входы 23-25 счетного устройства 17,первый и второй выходы 26 и 27 блока 12 сравнения частот, кодовый выход 28 блока 13 переключения поддиапазонов, управляющий вход 29 анализатора t4 знака скорости.
Цифровой датчик 7 положения измеряет положение в коде Грея,, позволяющем устранить неоднозначность считывания числа с кодовой шкалы.
Цифровой задатчик 1 положения представляет собой при ручном управлении поворотные или клавишные переключатели (в простейшем случае - набор тумблеров), с помощью которых задается необходимая кодовая комбинация, при автоматическом управлении - считывающее устройство с программоносителя или непосредственно из цифровой вычислительной машины.
Регулятор 2 положения представляет собой цифровой сумматор, выполненный на последовательно соединенных микросхемах К155ИМЗ.
Регулятор 3 скорости представляет собой Два цифровых сумматора, выполненных на микросхемах К155Ш-{3. На входы первого сумматора подаются сигналы с выхода регулятора 2 положения и сигналы обратной связи с выхода преобразователя 8 кода Грея в двоичный код. На входы второго сумматора подаются сигналы с выхода первого сумматора и сигналы с выхода задат- чика 9 скорости. Выходной сигнал вто рого сумматора подается на вход циф- роаналогового преобразователя, выполненного на микросхеме К572ПА1,. а с его,выхода аналоговый сигнал рассогласования по скорости подается на вход пи-регулятора скорости, выполненного на микросхеме К153УД6. С выхода пи-регулятора скорости аналоговый сигнал поступает на выход регулятора 3 скорости.
Регулятор 4 тока представляет собой пи-регулятор тока, выполненный идентично рассмотренному ПИ-регуля- тору скорости, и усилитель мощности, представляющий собой широтно-импульс ный преобразователь с устройством гальванической развязки для получения сигнала обратной связи по току. Исполнительный двигатель 5 представляет собой двигатель постоянного тока с независимым возбуждением.
Цифровой датчик 7 положения представляет собой кодовьш датчик со шкалой с кодом Грея, например, 12- разрядный датчик ПКФ12-1. Задатчик 9 скорости выполнен аналогично описанному цифровому задатчику 1 положения.
3. 1
Блок 11 формирования границ частотных поддиапазонов представляет собой два делителя частоты, выполненных на счетчиках К155 ИЕ7, коэффициент деления которых меняется в ши- роких пределах путем выбора соответствующего кода, предварительно запи- сываемого в счетчики.
Блок 12 сравнения частот состоит из цепи определения превышения час- тоты импульсов с выхода 19 блока 13 переключения поддиапазонов над частотой импульсов, соответствующей верхней границе поддиапазона и цепи определения ухода частоты импульсов с выхода 19 блока 13 переключения поддиапазонов за нижнюю границу поддиапазона. Первая цепь состоит из двоичного счетчика, выполненного на микросхемах К155ИЕ5, на счетный вход которого поступают импульсы с выхода 19, а на вход обнуления через цепь задержки импульса поступают импульсы от выходов блока 11 формирования границ частотных поддиапазонов с частотой, соответствующей верхней границе поддиапазонов. Последний разряд счетчика соединен с одним входом элемента И, на второй вход которого поступают импульсы с частотой, соот- ветствующей верхней границе поддиапазона. Если частота импульсов с выхода 19 превысит верхнюю границу под
Блок 13 переключения поддиапазо (разрядов) датчика скорости предст ляет собой реверсивный двоичный сче чик (микросхема К155ИЕ7), на первы (суммирующий) вход которого поступают импульсы Больше с выхода 26 блока 12 сравнения частот, а на вт рой вычитающий вход - импульсы Ме ше с выхода 27 блока 12 сравнения частот. Выходы счетчика соединены адресными входами двух селекторов мультиплексоров данных (микросхемы К155КП5), на информационные входы которых поступают сигналы с выхода преобразователя 8 кода Грея в двоичный код. Причем на информационны входы селектора-мультиплексора, вы ход которого через инвертор соедине
диапазона, то к моменту прихода очередного импульса от блока 11 формиро-35 выходом 19 блока 13 переключения вания границ частотных поддиапазонов в последнем разряде счетчика появится 1 и на выходе элемента И появится импульс Больше. Спустя некоторое время, определяемое цепью задержки, 40
поддиапазона, подаются сигналы с вы хода преобразователя 8 кода Грея в двоичный код, начиная с младшего ра ряда, т.е. на третий вход блока 1 сравнения частот подаются сигналы младшего разряда преобразователя 8 кода Грея в двоичный код. На информационные входы второго селектора- мультиплексора подаются сигналы пре образователя 8 кода Грея в двоичный код, начиная со второго разряда, т на третий вход блока 12 сравнения частот подаются сигналы со второго разряда преобразователя 8 кода Грея
счетчик обнулится и процесс измерения начнется сначала.
Вторая цепь отличается от первой тем, что на нее подаются импульсы с частотой, соответствующей нижней границе поддиапазонов, а также тем, что последний разряд счетчика соединен с элементом И через инвертор. Кроме того, для исключения ложных срабатыва- 50 двоичный код. Выход второго селектора-мультиплексора через инвертор соединен с выходом 20 блока 13 переключения поддиапазонов. Таким обраний предусмотрена блокировка от переполнения, представляющая собой элемент И, входы которого соединены с выходами счетчика, а выход - с одним
зом, при одной и той же кодовой комиз входов обнуления счетчика. В слу- 55 бинации на адресных входах селекто- чае, если частота сигнала на выходе ров-мультиплексоров на выход 20 про- 19 больше нижней границы поддиапазо- ходят импульсы с соседнего, более нов, то импульсы с выходов блока 11 старшего разряда относительно вы- формирования границ частотных под- хода 19,
диапазонов приходят в моменты времени, когда на выходе инвертора, соединенного последовательно с последним разрядом счетчика - О, и на выходе элемента И импульсы соответствуют. Если же частота на выходе 19 уменьшится и станет меньше нижней границы поддиапазонов, то на выходе инвертора будет 1 и на выходе элемента И появится импульс Меньше. С целью создания гистерезиса в- блок 12 сравнения частоты верхняя и нижняя границы поддиапазонов несколько сдвинуты относительно требуемых границ поддиапазонов.
Блок 13 переключения поддиапазонов (разрядов) датчика скорости представляет собой реверсивный двоичный счетчик (микросхема К155ИЕ7), на первый (суммирующий) вход которого поступают импульсы Больше с выхода 26 блока 12 сравнения частот, а на второй вычитающий вход - импульсы Меньше с выхода 27 блока 12 сравнения частот. Выходы счетчика соединены с адресными входами двух селекторов мультиплексоров данных (микросхемы К155КП5), на информационные входы которых поступают сигналы с выхода преобразователя 8 кода Грея в двоичный код. Причем на информационные входы селектора-мультиплексора, выход которого через инвертор соединен
выходом 19 блока 13 переключения
выходом 19 блока 13 переключения
поддиапазона, подаются сигналы с выхода преобразователя 8 кода Грея в двоичный код, начиная с младшего разряда, т.е. на третий вход блока 12 сравнения частот подаются сигналы с младшего разряда преобразователя 8 кода Грея в двоичный код. На информационные входы второго селектора- мультиплексора подаются сигналы преобразователя 8 кода Грея в двоичный код, начиная со второго разряда, т.е. на третий вход блока 12 сравнения частот подаются сигналы со второго разряда преобразователя 8 кода Грея
зом, при одной и той же кодовой ком51
Формирователь 15 импульсов представляет собой удвоитель частоты.
Анализатор 14 знака скорости содержит (см. фиг, 2) сумматор 30,триггер 31, элементы 32-35 залрета, формирователь 36 и элементы ИЛИ-НЕ 37 и 38. Его лринцил действия заключается в постоянном анализе кодовых комбинаций двух соседних разрядов преобразователя 8 кода Грея в двоичный
код. На входы В, В сумматора 30 подается текущая кодовая комбинация с выходов 19 и 20 блока 13 переключения поддиапазонов, а на входы А, А, -. кодовая комбинация, предшествующая заданной и запоминаемой D- триггером 31. На выходе переноса сумматора 30 появляется сигнал логического нуля, если lAllBl, и логической единицы, если . Для предотвра-20 щения ложных срабатываний при смене кодовой комбинации из 3 в О и ия О в 3 служат схемы 32-35 запрета. С приходом импульса на тактовый вход 29 с выхода формирователя 15 импульсов происходит перепись информации о знаке и на выходе Q,, триггера 31 появляется новая информация о знаке.
По спаду импульса, поступившего на вход 29, формирователь 34 формирует импульс, осуществляющий перепись информации с выходов 19 и 20 блока 13 переключения поддиапазонов. Сумматор 30 выполнен на микросхеме К155ИМ2, триггер 31 - на К155ТМ7, элементы 34 и 35 запрета - наК155ЛАЗ, Ключ 16 представляет собой элемент И (К155ЛИ1), а счетное устройство 17ки, выполненный на элементах К155ЛАЗ Так как коэффициент деления формирователя 18 периода измерения кратен 2 а код на выходе счетчика блока 13 переключения поддиапазонов может быть не кратен 2, то между выходом 28 и установочными входами счетчика формирователя 18 периода измерения находится буферный регистр памяти, устанавливающий коэффициент деления, кратный двум, в зависимости от кода счетчика, входящего в состав блока 13 переключения поддиапазонов 13. Буферный регистр памяти выполнен на
15 микросхеме К155РЕЗ.
С приходом импульсов Больше или Меньше обнуляется счетчик формирователя 18 периода измерения. По спаду импульсов Больше или Меньше запускается формирователь коротких импульсов, рассмотренный ранее, выходной импульс которого поступает на вход разрешения записи счетчика блока 18, при этом устанавливается новый коэффициент деления.
Электропривод работает следующим образом.
Задание положения объекта 6 регулирования подается с выхода цифрово30 го задатчика 1 положения в виде п- разрядного двоичного кода на первые п входов регулятора 2 положения. Обратная связь по положению заводится на другие п входов регулятора 2 по35 ложения с п выходов преобразователя 8 кода Грея в двоичный код, который преобразует код Грея датчика 7 положения в двоичный код. Выходной
25
сигнал регулятора 2 положения, соот- счетчик импульсов (микросхемы К155ИЕ5), 40 ветствующий рассогласованию по поло- выходы которого соединены со входами регистра памяти (микросхемы К155ТМ5).
Импульс, поступающий от формирователя 18 периода изменения на вход 24, приходит непосредственно на вход перезаписи регистра памяти и произ- I водит перезапись информации с выходов счетчика в регистр памяти. По спаду импульса, поступающего от формирователя 18 периода измерения,запускается формирователь коротких импульсов. Этот формирователь формиружению, подается в качестве сигнала задания на первый вход регулятора 3 скорости. Вход и Выход - это либо аналоговые входы и выходы, либо цифровые п-разрядные входы и выходы.
50
Выходной сигнал регулятора 2 поло жения может быть представлен либо в цифровом виде, либо в аналоговом - в зависимости от требований к точности регулирования скорости. На второй вход регулятора 3 скорости подается сигнал задания постоянной составляющей скорости от задатчика 9 скорости
ет короткий импульс, поступающий на вход обнуления счетчика и обнуляет
последний. Импульсы Больше и Мень- Обратная связь по скорости перемещеше от блока 12 сравнения частот поступают также на вход обнуления счетчика и развязаны от импульсов с выхода формирователя через блок развязния объекта 6 регулирования подается на третий вход регулятора 3 скорости с выхода счетного устройства 17 (из мерителя частоты) в таком же виде,
0
0
ки, выполненный на элементах К155ЛАЗ. Так как коэффициент деления формирователя 18 периода измерения кратен 2, а код на выходе счетчика блока 13 переключения поддиапазонов может быть не кратен 2, то между выходом 28 и установочными входами счетчика формирователя 18 периода измерения находится буферный регистр памяти, устанавливающий коэффициент деления, кратный двум, в зависимости от кода счетчика, входящего в состав блока 13 переключения поддиапазонов 13. Буферный регистр памяти выполнен на
5 микросхеме К155РЕЗ.
С приходом импульсов Больше или Меньше обнуляется счетчик формирователя 18 периода измерения. По спаду импульсов Больше или Меньше запускается формирователь коротких импульсов, рассмотренный ранее, выходной импульс которого поступает на вход разрешения записи счетчика блока 18, при этом устанавливается новый коэффициент деления.
Электропривод работает следующим образом.
Задание положения объекта 6 регулирования подается с выхода цифрово0 го задатчика 1 положения в виде п- разрядного двоичного кода на первые п входов регулятора 2 положения. Обратная связь по положению заводится на другие п входов регулятора 2 по5 ложения с п выходов преобразователя 8 кода Грея в двоичный код, который преобразует код Грея датчика 7 положения в двоичный код. Выходной
5
сигнал регулятора 2 положения, соот- ветствующий рассогласованию по поло-
жению, подается в качестве сигнала задания на первый вход регулятора 3 скорости. Вход и Выход - это либо аналоговые входы и выходы, либо цифровые п-разрядные входы и выходы.
Выходной сигнал регулятора 2 положения может быть представлен либо в цифровом виде, либо в аналоговом - в зависимости от требований к точности регулирования скорости. На второй вход регулятора 3 скорости подается сигнал задания постоянной составляющей скорости от задатчика 9 скорости.
ния объекта 6 регулирования подается на третий вход регулятора 3 скорости с выхода счетного устройства 17 (из мерителя частоты) в таком же виде,
то и сигналы от регулятора 2 поло- ения и задатчика 9 скорости. Выходой сигнал регулятора 3 скорости, соответствующий рассогласованию по , скорости, является заданием для регулятора 4 тока, на втор ой вход которого подается обратная связь по току исполнительного двигателя 5. Таким образом, в исполнительном двигателе 5 поддерживается ток, необходимый для отработки рассогласования в электроприводе по скорости и по положению.
Сигнал по скорости на выходе счетного устройства 17 образуется следующим образом.
Генератор 10 импульсов опорной частоты тактирует работу скоростного канала. Блок 11 формирования границ частотных поддиапазонов, представляющий собой делитель частоты, формирует две последовательности импульсов с частотами, соответствующими верхней и нижней границам поддиапазонов скоростного канала. Различным поддиапазонам, на которые разбит весь диапазон рабочих угловых скоростей электропривода, соответствует один и тот же диапазон частот импульсов, снимаемых с блока переключения поддиапазонов (разрядов) кода Грея в двоичный код преобразователя 8. При вращении вала датчика 7 положения импульсы с выхода преобразователя 8 кода Грея в двоичный код поступают на вход блока 13 переключения поддиапазонов (разрядов) кода датчика положения.
На выход 19 блока 13 переключения поддиапазонов в зависимости от поддиапазона угловой скорости проходят импульсы от одного из разрядов пре- образователя 8 кода Грея в двоичный код. На выход 20 проходят импульсы от соседнего, более старшего разряда преобразователя 8 кода Грея в двоичный код. С выхода 19 блока 13 переключения поддиапазонов импульсы поступают на вход формирователя 15 импульсов, выполнякяцего удвоение часто- ты. С выхода формирователя 15 импульсы поступают на информационный вход 21 ключа 16, управляемого формирователем 18 периода измерения по запреающему входу 22. Импульсы с выхода люча 16 поступают на вход 23 счетного устройства 17 в течение периода змерения. По окончании периода измерения на выходе формирователя 18 периода измерения формируется короткий импульс, запрещающий прохождение импульсов через ключ 16 на вход 23
счетного устройства 17. По фронту запрещающего импульса, поступающего также на вход 24 обнуления и перезаписи счетного устройства 17, происходит перезапись информации с выхода счетчика в регистр памяти,входящий в состав счетного устройства 17. По спаду запрещающего импульса происходит обнуление счетчика счетного устройства 17, после чего процесс измерения повторяется. Двоичный код на выходе преобразователя 8 кода Грея в двоичный код соответствует измеряемой угловой скорости. С выходов 19 и 20 блока 13 переключения поддиапазонов импульсы поступают на входы анализатора 14 знака скорости, который по чередующимся кодовым комбинациям на двух соседних разрядах определяет знак скорости.
Сигналы, соответствующие знаку скорости, с выхода анализатора 14 знака скорости поступают на вход 25 счетного устройства 17. Кодовая комбина ция, соответствующая скорости вращения исполнительного двигателя 5 (с
учетом знака) подается с выхода счетного устройства 17 на вход регулятора 3 скорости. Импульсы с выхода 19 блока 13 переключения поддиапазонов
поступают также на вход блока 12 сравнения частот. Если частота импульсов, поступающих на вход блока 12 сравнения частот, превысит верхнюю частоту диапазона, то на первом
26 выходе блока 12 сравнения частот формируется одиночный импульс Больше. При поступлении импульса Больше на вход блока 13 переключения поддиапазонов последний производит
переключение на соседний поддиапазон, и на выход 19 блока 13 переключения поддиапазонов проходят импульсы от более старшего разряда преобразователя 8 кода Грея в двоичный код (соответственно с дорожки датчика 7 положения, имеющей меньшее количество градаций).
На выход 20 проходят импульсы с соседнего, более старшего разряда. Аналогично на втором 27 выходе блока 12 сравнения частот формируются одиночные импульсы Меньше. При поступлении на вход блока 13 переключения поддиапазонов импульса Мень ше на его выход 19 проходят импульсы с более младшего разряда преобразователя 8 кода Грея в двоичный код (соответственно с дорожки датчика 7 положения, имеющей большее количество градаций). На выход 20 блока 13 переключения поддиапазонов проходят импульсы с соседнего, более старшего разряда. В соответствии с номером используемого разряда (дорожки) датчика 7 положения, на кодовом выходе 28 блока 13 переключения поддиапазонов формируется сигнал, определяющий коэффидиент деления управляемого де- лителя формирователя 18 периода.измерения. По фронту импульсов Больше или Меньше происходит обнуление формирователя 18 периода измерения, а также счетчика в счетном устройст- ве 17. По спаду импульсов Больше или Меньше происходит установка но вого коэффициента деления в формирователе 18 периода измерения. Для сохранения точности измерения угло- вой скорости, соответствующей измерению с помощью дорожки датчика 7 по- ложения с наибольшим количеством градаций (младщий разряд), при переходе к измерению с помощью дорожек с мень- шим количеством градаций (более старшие разряды) пропорционально увеличивается период измерения. Период измерения при использовании разряда с номером m равен где Т - период измерения при работе с младшим разрядом.
Макетный образец электропривода выполнен на элементах серий 155, 153, 249 и 572.
Таким образом, предлагаемое устройство по сравнению с известным обладает более широким диапазоном регулирования скорости, большим бЫСТ-
родействием и, как следствие, большей динамической точностью воспроизведения сигнала задания по положению. Перечисленные П1)еимущества достигаются за счет возможности своевремен- кого, по достижении определенной скорости вращения, перехода на соседний разряд (дорожку) датчика. При этом точность измерения скорости сохраняется на уровне точности, получен- ной от младшего разряда, во всем диапазоне регулирования скорости. В известном устройстве приходится искусственно снижать скорость отработ1308982
10
ки входного задания, так как при работе только с младшим разрядом по достижении определенной скорости вра щения импульсы с младшего разряда преобразователя могут исчезнуть вследствие трапециедальной формы импульсов с датчика и конечной полосы пропускания разрядных формирователей датчика.
Формула изобретения
Пифровой следящий электропривод, содержащий формирователь импульсов, анализатор знака скорости, подключенный выходом к первому управляющему входу счетного устройства, последовательно соединенные задатчик положения, регулятор положения, регулятор скорости, регулятор тока, исполнительный двигатель, объект ре- гулирования, цифровой датчик положения и преобразователь кода Грея в двоичный код, подключенный выходом к второму входу регулятора положения и задатчик скорости, соединенный выходом с вторым входом регулятора скорости, подключенного третьим входом к выходу счетного устройства, второй вход регулятора тока соединен с вторым выходом исполнительного двигателя, отличающийся тем, что, с целью расширения диапазона регулирования по скорости, повьш1е- ния быстродействия и динамической точности электропривода, в нем дополнительно установлен блок формирования границ частотных поддиапазонов блок сравнения частот, блок переключения поддиапазонов, ключ, формирователь периода измерения и генератор импульсов, соединенный выходом с первым управляющим входом формирователя периода измерения и с входом блока формирования границ частотйых поддиапазонов, подключенного первым и вторым выходами соответственно к первому и второму входам блока сравнения частот, соединенного третьим входом с первым выходом блока переключения диапазонов, первым входом анализатора знака скорости и входом формирователя импульсов, а первым и вторым выходами - соответственно с вторым и третьим управляющими входами формирователя периода измерения и счетного устройства, а также с первым и вторым управляющими входами блока переключения поддиапазонов, подключенного кодовым входом К выходу преобразователя кода Грея в двоичный код, кодовым выходом - к кодовому входу формирователя периода измерения, а вторым выходом - к второму входу анализатора знака, соединенного управляющим входом с выходом
формирователя импульсов и с информационным входом ключа, подключенного управляющим входом к выходу формиро - вателя периода измерения и к четвертому управляющему входу счетного устройства, а выходом - к информационному входу счетного устройства.
Изобретение относится к области робототехники и к станкостроению и может найти широкое применение при управлении промьшшенными механизмами, в которых необходимо высокоточное регулирование как по положению, так и по скорости в широком диапазоне, как, например, в станках с программным управлением, роботах и манипуляторах. Целью изобретения является расширение диапазона регулирования по скорости, повышение быстродействия и динамической точности электропривода. Поставленная цель достигается следующим образом. Сигнал задания по положению поступает на вход регулятора положения и сравнивается в нем с текущим положением объекта регулирования. Сигнал рассогласования по положению поступает на вход регулятора скорости, на остальные входы которого поступают сигнал задатчика скорости и сигнал скоростной обратной связи. Сигнал рассогласования по скорости поступает на вход регулятора тока, в котором сравнивается с током исполнительного двигателя и усиливается по мощности. Этот сигнал воздействует на исполнительный двигатель, который поворачивает объект регулирования, Положение объекта фиксируется датчиком положения, на выходе которого формируется код Грея, который преобразуется в двоичный код. Этот код поступает на второй вход регулятора положения и на вход бл:ока скоростной обратной связи. Диапазон изменения сигнала скоростной обратной связи разбит на m поддиапазонов, которые переключаются по мере изменения скоростного сигнала. Скоростной сигнал в любом поддиапазоне изменяется с постоянной точностью. 2 ил. «е (Л со о 00 ) 00 ю
фиг. f
С ebif29 блока 15
фиг. г
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ ЭЛЕКТРОПРИВОДОМ | 0 |
|
SU188549A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Телефонное устройство | 1926 |
|
SU7527A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой следящий электропривод | 1974 |
|
SU723505A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
