второй вход которого соединен с датчиком положения направлянадик колес, а выход - с усилителем,
4.. Система по п. 1, о т л и ч аю ц а я с я тем, что схема стабилизации направляющих, колес содержит формирователь управляющих сигналов, .первый и второй компараторы, первый и второй элементы ЗИ, первый и второй элементы ИЛИ, элемент 2И, первый и второй элементы НЕ и третий элемент ИЛИ, причем вход формирователя управляющих - сигналов связан с датчиком положения направлякадих колес, а выходы - с входами первого и второго компараторов, выходы которых соединены с первыми входами соответственно первого и второго элементов ЗИ вторЕЛе входы которых объединены и подключены к выходу элемента 2И, а третьи входал первого и второго элементов ЗИ также объединены и соединены с выходом переключателя режимов управления, выходы первого и второго элементов ЗИ подключены к первым входам соответственно первого и второго элементов ИЛИ, вторые входы ко-
торых соединены с входами соответственно первого и второго элементов НЕ и с в иэдами третьего элемента ИЛИ, выход которого подключен к управляемому частотно-импульсному регулятору схемы автоматической регулировки интенсивности и величины управляющего ;воздействия, причем входы первого и второго элементов НЕ соединены так:же с выходами соответственно первого и второго компараторов схемы управ.яения на рабочем гоне, а выходы подключены к 9xoRS(M элемента 2И.
;5. Система по п. 1, о т л и ч аю щ а я с я тем, что усилитель содержит два логических элемента ЗИ, первые входы которых соединены с блоком реверсирования управлякйцего воздействия, вторые - соединены между собой и с выходом управляемого частотно-импульсного регулятора, третьи - с выходами элементов НЕ схемы регулировки интенсивности величииы управйяимцего воздействия, а выходы подключены к входам каналов усилителя, выходы которых соединены с исполнительными механизмами.




| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1985 |
|
SU1318183A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |
1. СИСТЕМА АВТШ16Ч13ИРОВАИНОГО ВОЖДЕНИЯ КОЛЕСШХ МШИННО-ТРАКТОРНЫХ АГРЕГАТОВ, содержащая програм мный блок, связанный с переключателем режимов управления, датчики траекторной осйибки и положения направлянвдих колес, датчик скорости и усилитель, связанный с исполнительными механязмаувл, отличающаяс я тем, что, с целью повьвиения качества автовождения и расширения области применения, она дополнительно содержит датчик положения рабочих органов, связанный с программным блоком и переключателем режимов управления блок реве рсирования управляющего воздействия, связанн|з1й входом с переключателем режимов управления, а выходами:- с усилителем, сзгему управления движения на рабочем гоне, связанную со схемой стабилизации направля Ш1их колес и через последнюю - с переключателем режимов управления, схему автоматической регулировки интенсивности и величины управляющего воздействия, связанную входами со схемой стабилизации направляющих колес и с датчиками скорости и положения направляющих ко лес, а выходами - с усилителем, тактовый генератор, связанный входом с датчиком скорости, а выходом - с программным блоком, и датчик боково го крена, при этом датчики траектор-v ной ошибки, бокового крена-и положения направляющих колес связаны со схемой управления движением на рабо-. чем гоие, причем датчик положения направляющих колес связан также со схемой стабилизации последних. 2.Система по п, 1, о т л и ч аю щ а я с я тем, что схема управления движением на рабочем гоне содержит сумматор, к входам которого подключены датчик тюложения напр вляющих колес и через блоки интегрирования датчики траекторной схоибки и бокового крена, а к {Ходам - компараторы, кото{% е своими выxoдa вI соединены со схемой стабилизации нап- КЛ раштяющих колес и через элементы ИЛИ последней связаны с переключателем режимов управления. 3.Система по п, 1 о т л и ч аю щ а я с я f&K, что схема автоматической регулировки интенсивности и величины управляющего воздействия О содержит блок изменения интенсивности управляюй го воздействия по уравсиэ нению W « + B.V ч- С. 00 и блок ограничения вёличиш управляющего воздействия по уравнению оэ ot BgV + С2 где W и сзС соответственно интенсивм ность и величина управляющего воздействия; А,В,С постоянные коэффициенты, V линейная скорость движения агрегата, при этом упомянутые блоки входами подключены через блок интегрирования к датчику, хзкорости, а выходами - соответственно к первому входу управляемого частотно-импульсного регулятора, связанного входом установки со схемой стабилизации направлякпшх колес, а вь1ходом - с усилителем, и к первому входу сдвоенного компаратора
Изобретение относится к устройствам для автоматизированного управления движением сельскохозяйственных машинно-тракторных агрегатов и специализированных самоходных машин на рабочих гонах и поворотных полосах при выполнении сельскохозяйственных полевых механизированных работ и может быть использовано для автоматизации вождения колесных тракторов и специалиэированных самоходных маШИН в составе Системы- управления кокилексно автоматизированного машинного агрегата.
Известно устройство для автрМатизиро&анного упразапения машинно -тракторным агрегатом яа поворотной полосе при Шзшолнении поворота по Универсальному алгоритму С
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является ус ройетво для управления движением трактора, содержащее программный блок, связанный с переключателем режимов управления, датчики траекторной ошибки и положения направляющих колес, датчик Скорости и усилитель, связанный с исполнитеЬьныкш гдаханиэмалда 12 J.
Недостатками этого устройства являются отсутствие коррекции системы управления в зависимости от угла бокового крена трактора и автоматической регулировки предельного угла . поворота направляквдих колес или полурам трактора в зависимюсти от скорости движения агрегата, а также ограниченность области применеия, так как данное устройство предназначено япя автоматизации вождения трактора только на поворотной полосе и не обеспечивает автовождения на рабочем
гоне.
Цель изобретения - повышение качества автовождения и расширение области применения. Указанная цель достигается тем,
что система автоматизированного вож-, дения колесных мшиинно-трактсрных агрегатов дополмитёльно содержит Датчик положения рабочих органов, связанный с програлошым блоком и переключателем режимов управления, блок реверсирования управляющего воздействия, связанный вхаоом с п юкгаечателем режимов управления, а выходами - с усилителем, схему угфавленяя
движением на рабочем гоне, связанную
са схемой стабилизации направляющих колес и через последнюю - с иереюиэ чателем , упрйвления, схему ёштоматической регулировки интенсивности и величины управлякщего воздей
ствия, связанную входшли со схемой стабилизации иаправляккцих колес- и с датчиками скорости и положения
направляющих колес, а выходами - с усилителем,.тактовый генератор, свя занныйi входом с датчиком скорости, а выходом - с програкиным блоком, и Датчик.бокового крена, при этом датчики траекторной ошибки, бокового крена и положения направляюцих колес связаны со схемой управления на рабочем гоне, причем датчик положения направлякидих колес связан также со схемой стабилизации последних.
Причем схема управления движением на ра бочем гоне содержит сушлатор, к входам которого подключены датчик положения направляющих колес и через блоки интегрирования, датчики траекторной ошибки и бокового крена, а к выходам - компараторы, которые своими выходами соединены со схемой стабилизадии направляющих колес и через элементы ИЛИ последней связаны с переключателем режимов управления.
Схема автоматической регулировки интейсйвности и величины управлянадего воздействия содержит блок изменения интенсивности управляюцего воздействия по уравнению
W + е
и блок ограничения велишны управляющего возд ствия по уравнению
+ С
BgV
2
где W, cL - соответственно интенсивность и величина управляющего воздействия;
С постоянные коэффициента
ft, В, линёйиай скорость двйжеV . НИН агрегата.
При этом упомянутые блоки входаг-ш подключены через блок иитерриро еания к датчику скорости, а выходами - соответственно к nej)BOMy входу управляемого частотно-импульсного регулятора, связанного входом установки со схемой стабилизации иаправляювдих колес, а выходом - с усилителем, и к первому входу сдвоенного компаратора, второй вход которого соединен с датчиком положения направлякяцих колес, а выход - с усилителем.
Схема стабилизации направлякяцих колес содержит формирователь управлякядйх сигналов, первый и второй компараторы, первый и второй элементы ЗИ, первый и второй элементы HJHI элемент 2И, первый и второй элементы НЕ и третий элемент ИЛИ, причем вход формирователя упра8ЛЯ1Ш1Их сигналов связан с датчиком положения направляющих колес, а выходы - с входами первого и второго компараторов, выходы которых соединены с первыми ВХОДЕ1МИ соответственно первого Н-второго элементов ЗИ, вторые входы которых объединены и подключены к выходу элемента 2И, третьи входал первохчэ и второго элементов ЗИ объединены и соединены с выходом переключателя режимов управления, выходы первого и второго элементов ЗИ подключены к первым входам соответственно первого и второго элементов ИЗШ, вторые входы которых сое1щнены с входами соответственно первого и второго элементов НЕ и с входами третьего элемента ИЛИ, выход которого подключен к управляемому частотно-иютульсному регулятору схемы автоматической регулировки интенсивности и величины управляющего воздействия, причем входы первого и второго элементов НЕ соедине5ны также с выходами соответственно первого и второго компараторов управления на рабочем гоне, а выходы подключены к входам элемента 2И,
Усилитель содержит два логических элемента ЗИ, первые входы которых
0 соединены с блоком реверсирования управляющего воздействия, вторые соединены между собой и с выходом управляемого частотно-и шульсного регулятора, третьи - с выходами эле5ментов НЕ схемы регулировки интен сивности и величины управляющего воздействия, а выхода подключены ко входам каналов усилителя, выходы которых соединены с исполнительеными механизмами.
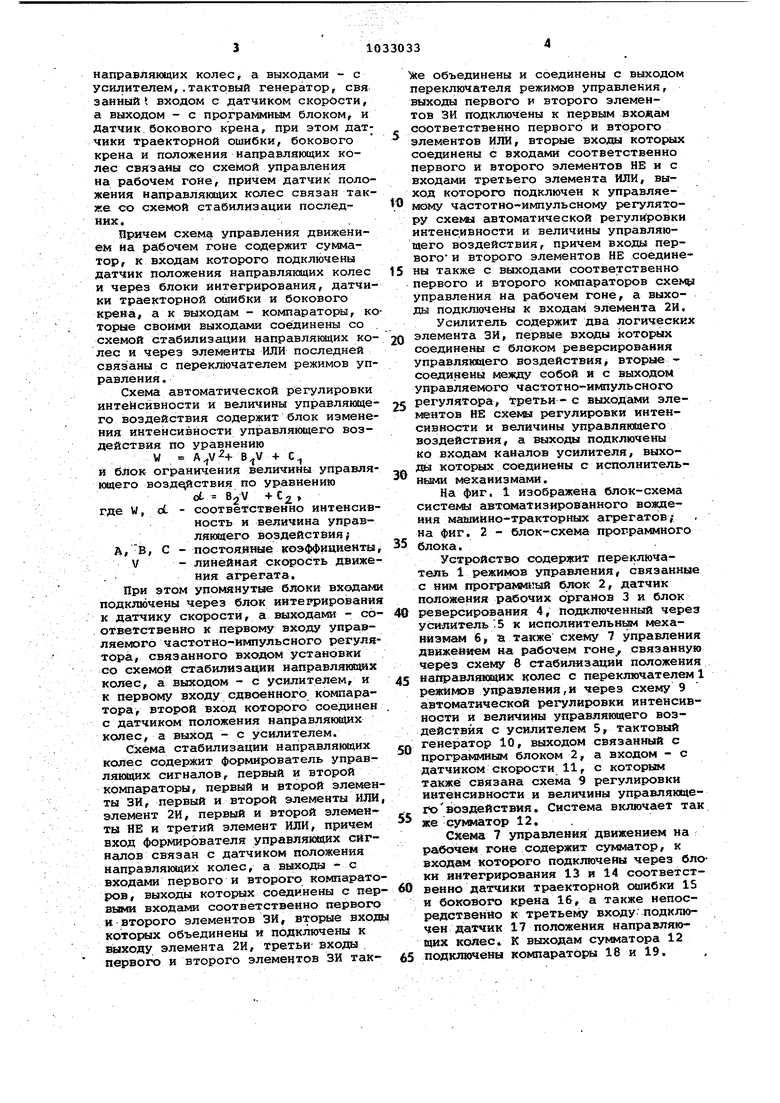
На фиг, 1 изображена блок-схема системы автс 4атизированного вождения машинно-тракторных агрегатов;; на фиг. 2 - блок-схема программного
5 блока.
Устройство содержит переключатель 1 режимов управления, связанные с ним программ1 ый блок 2, датчик положения рабочих органов 3 и блок реверсирования 4, подключеннБгй через
0 усилитель 5 к исполнительнБМ механизмам б st также схему 7 управления движейием на рабочем гоне,, связанную через схему в стабилизации положения иаправля1Ш}Их колес с переключателем 1
5 режимов управления,и через схему 9 автоматической регулировки интенсивности и величииы управлякяцего воздействия с усилителем 5, тактовый генератор 10, выходом связанный с
0 програшдаым блоком 2, а входом - с датчиком скорости 11, с которым также связана схема 9 регулировки ийтеисивности и величины управляющего воздействия. Система включает так
5 же сумматор 12, .
Схема 7 управления движением на рабочем гоие содержит сумматор, к входам которого подключены через блоки интегрирован ия 13 и 14 соответст0венио датчики траекторной сшгабки 15 и бокового крена 16, а также непосредствеийо к третьему входу подключен датчик 17 положения направляющих койес К выходам сумматора 12 подключены компараторы 18 и 19.
5
Схема 9 автоматической регулировп ки интенсивности и величины управляквдего воздействия содержит блоки 20 изменения интенсивности и 21 ограничекия величины управляющего воздействия, входами подключенные через блох 22 интегрирования к датчику 11 .скорости, а выходами первый - к управляемому частотно-импульсному регулятору 23, второй - через сдвоенный компаратор 24, другим вхсдаом связанный с датчике 17 положения направлякидих колес, к двум логическим элементаи НЕ 25 и 26.
Схема 8 стабилизации направляющих колес содержит фор1 Шрователь 27 управляккаих сигнешов, вхоДом связанный с датчиком 17 положения нап-: равляю( колес, а выходами - серез два компаратора 28 и 29 и два логичесинх элемента ЗИ 30 и 31 с логическими элементами ИЛИ -32 и 33, осуадествляивдими связь схемы 7 управления движемием на рабочем гоне с переключателем 1 режимов управления. ива других входа элементов ЗИ 30 и 31 связаны между собой и соединены через логические схемы 2И 34 и НЕ 35 и 36 с выходами схемы 7 управления движением на рабочем гоне. Третьи входы элементов ЗИ 30 и 31 соединены 1(ежду собой и с выходом переключателя 1 режимов управления. К входам элементов НЕ 35- и 36 подключены входа третьего элемента ИЛИ 37, выхолом связанного с управляемым час-. тЬ но-И1 ульсным регулятором 23.
Усилитель 5, выполненный двухкаиальным содержит два логических элемента ЗИ 38 и 39, первые входы которых соединены с блоком 4 реверсирования, вторые соединены между собой и с выходом регулируемого частотнр ймпульсного регулятора 23, третьис выходашЕ элементов НЕ 25 и 26 схемы 9 автометической регулировки интенсивност и величины управляющего воздействия. йаходы элементов ЗИ 38 И 39 соединены со входами каналов 40 и 41 усилителя 5, выходы которых подключены к испоянительмым механизмам 6.
-Сумматор 12 выполняет сум1 шрова«ие сигналов датчиков 15 траекторвой ошибки и 17 положения направляющих колес, а также вычитание из полученной суммы сигнала датчика 16 бокового крена. БЛОКИ 13 и; 14 интегрирования сигналов датчиков выполнены в виде фильтров нижних частот с полоеа да пропускания соответственно доЮ, 00 Гц и до 0,50 Гц.
Ъяо1а 22 интегрирования сигналов датчика 11 скорости выполнен в виде преобразователя импульсных сигналов в напряжение, пропорциональное частоте. Блок 20 изменения интенсивноети упрайлякадего воздействия шполнен
в виде.схемы, преобразующей напряже1ние в зависимости от скорости движения V по уравнению ,
« А;; |u(V)j2+ (у + г
где U(WJ - напряжение на выходе блока 20 изменения интенсивности W управляющего воздействия/
- напряжение на выходе блока 22 интегрирования
0импульсных сигналов датчика 11 скорости. Блок 21 ограничения величины oL управляющего воздействия выполнен в виде схемы, преобразующей напряжение по уравнению
U(cQ В2 0(V) 4- €2 где Ufci.) - напряжение на выходе блока 20.
Частотно-импульсный регулятор 23 0 выполнен в виде генератора прямоугольных импульсов управляемого напряжением, причем длительность импульсов неизменная, равная 0,05 с.
Делитель частоты на выходе генератора выполнен на В-триггерах. Входы триггеров для установки логической соединены между собой и через логический элемент НЕ (не показан) с выходом элемента ИЛИ 37. Это позволяет осу„ ществлять синхронизацию частотно-импульсного регулятора и схемы 7 управле ния движением на рабочем гоне.
Программный блок 2 содержит двоичНо-десятичные счетчики импуль- 5 соа 42, 43 и 44 подключенные к входам дешифраторов 45, 46 и 47, переключатели 48-65, входами по шесть штук Тремя группами подключенные к дешифраторам 45, 46 и 47, логичес-
0 кие элементы 4Й 66-71, три входа которых подключены к переключателям (4 8-65 J по одному из группы, четвертый - к зК11ходам дешифратора 72, а выходы элементов 4И соединены между собой и со входом двоично-десятичного счетчика импульсов 73, , Счетчик 73 и дешифратор 72 соединены между собой. Первый и четвертый, второй и пятый выхода дешифратора 72 объединены и подключены к переключателю 1 режимов управления, шестой . выход дешифратора 72 соединен с переключателем 1 режимов управления/ с звуковым генератором 74 через схему задержки 75 и с триггером 76
5 предназначенным для выдачи сйгиаяа разрешакнцего пропускание логической схемой 2Й 77 счетных импуяьеов от тактового генератора К счетчику 42, Каждагй счетчик, соеди-иенный с дешифратором, образует счетйую декаДУ, логические элементы 4И 66---71; ечетчик 73 и дешифратор 72 реализуют универсальный алгоритм автовождения машинно-тракторных агрегатов по траекториям рациональных видов поворотов. Счетчики 42, 43 и 44, дешифраторы 45 46 и 4 и переключатели 4U-65 состав ляют шесть трехраэраввых задатчиков длительности реалвэгшйя элементов универ салъного алгоритма Звуковой генератор 74 прейназйа ен для предухфеждения водителя об окончании отработки уииверсаяьного алгоритма ft перехода в режим 1ссфре{стировки завершцо егр участка траектории. . Монтаж устройбтва йа тракторе мш и1няетс:я в следу|ЕЯ м порядке. К передйей части йереднего бруса рамы трактора, крейится рама кони ра г телескся1ическая конструкция с двумя шарнирами и ги сороиилиндрами. Первые ш$1рнир и )цилиндр преднаэиачены для перевода рамы из тран епортногб положения в рабочее и обратно, вторые - пр1едназначены для поворота рамы копира в крайнее прагвое или в крайнее левое положения. Это необходимо при челночном способе движения, когда базовая борозда располагается справа или слева от трактора.Гидроцйлиндры подключаются к гидросистеме трактора: первыйпараллельно основному Щ1линдру гйдррнавесной системы трактора, а второй - к отдельной секции тракторного ра ятределителя. Электронный блок вклки ающИй все позиции, кроме поэ.З 6, 11, 15, 16 и 17, К1з евйтся в кабив трактора перед водителем над передним ветровым стеклом. Датчик 3 положе ния органов крепится на навесном агрегате на корпусе заднего моста трактора, а на прицепном аг ийгате - на раме мавжны у механизма подъема рабочих е ганов. Исйолйнтёльнйе механизм 6 (алектромагнв TfcsJ крепятся на расп8 еяелителв гидропривода рулевого механизма. Датчик 17 положения аавравляющих колес трактбра крепится спевЕиальньа кронштейном на поворотном валу правого направляющегоколеса трактора. Датчик 15 траекторно ошибки устанавли вается на поД&ижном конце раны коШ1р а а к нему крепится щуп-копир с пад аллёлоррси1 юой подвеской. Датчик 16 бокового йрена еяециальнш кронштейном крепятся к каби«е трактора над правьш крылом заднего коле са. Датчик 11 скорости устанааливаётся в коробке перемены передач тЕй(ктрра у щбстерн привода вала отбора кмдаости. йеречисленные узлы соединяются кабеяя вд с штепселышмк разъемами. Устройство работает следующим . Переключатель 1 режимов управлеНИН позволяет перекшочить устройств в - режимы автоматического управления движениемна поворотной полосе, ав(Тематического управления движением иа рабочем гоне и ручного управленц движением машинно-тракторного агрегата. Перед началом работы производят подготовку поля: проверяют наличие больших камней, столбов, отдельно стоящих деревьев, оврагов и кругах препятствий. Деревянными вешками Через 10-15 м или проходом почвообрабатывающей машины (например плуга) отбивают контрольную линию поворотной полош. Рассчитывают Щ)огратну поворота. При этом исходными дан{шми являются ширина поборота (равная , в частности, ширине захвата агрегата при челночном способе движения ), исходная линейная скорость движения потраекторишповорота, принятая равной , и универсальный алгоритм автовожденищ на поворотной полосе, который записывается следующим образом; 0. И управляющие сигналы на выходе декиафра-, тора 72; вк численные длительности реалкза.ции элементов прогрш ош. Далее включают тумблер питания устройства от бортовой сети трактора и кнопкой устанавлй важ направление йервого поворота (тумблер и кнопка расположены на панели переключателя 1 режимов управления и отдельно не показ аньд. Переклкпателя вt 48-65 устанавливают значения длительностей t tg элементов проrpaii9 ei авт жатизированногр поворота агрегата. Первый рабочий проход выполняют при ручном управлении - рама копира в рабочем положении, но реяЁЮ4 автовсякдеиия на гоне не . При пег .ресечении щупом-копиром контрольной лнн1Ш поворотной полосы водитель рычагом управления основным цилиндром 1Ч1дцюси :те1 &1 выглубляет рабочие ОР гама, а эатем другим рычагом управпе11ия донолвительным цилиндаом поворачивает раму копира в противситоложную сторону. При переводе машины в т)анспортное положение датчик 3 июложения рабочих органов выдает электри- , ;Ческий сигнал на переключатель 1 режимов управления, что приводит к началу работы программного блока 2 и подключению его через переключатель 1 к блоку 4 реверсирования и схеме 8 стабилизации направляющих колес. Сигнал от датчика 3 положени рабочих органов переключает триггер 76, логическая схема 2И 77 начинает пропускать импульсы от тактового генератора 10 на вход двоичнодесятичного счетчика 42. Происходит счет импульсов счетчиком 42 и преобразование двоично-десятичного кода в десятичный дешифратором 45. Кажды десятый импульс с выхода деишфратора 45 поступает на вход счетчика 43 с выхода дешифратора 46 - на вход счетчика 44. Таким образом, на выход дешифратора 45 поступают сигналы через 0,1 at, дешифратора 46 через at и дешифратора-47 - через 1 С выходов дешифраторов сигналы поступают на контактное поле переключателей 48-65 . Длительность составляющих элементов программы поворота например t, задается переключателя ми 48, 49 и 50. в момент, когда на входы логического элемента 4И 66 поступают сигналы одновременно от трех указанных переключателей, на выходе появляется сигнал и поступает на вход счетчика 73, последний переключается, на первом выходе дешифратора 72 появляется напряжение в виде логической 1, схема стабилизации направляющих колес отключа. ется. Это же напряжение поступает на вход логического элемента 4И 67 подготавливая его к работе. В момент времени t с выхода элемента 67 на вкря счетчика 73 проходит сигнал, опять прежсходит переключение счетчика 73, логическая fl с первого выхода дешифратора 72 переключается На второй изготавливается к срабатыванию логический элемент 4И 68. Процесс циклически повторяется до отработки последнего элемента програмкы поворота длительностью t. В момент выхода логической 1 на шестом выходе дешифратора 72 происходит выдача управляквдего сигнала в схему переключателя 1 режимов управления и на вход блока 75 эадержКи, Это приводит к переключению триггера 76, выводу на нуль счетчиков 42 43, 44 и 73, включению звукового генератора 74 и отключению иоследнего автоматически через 3 с. Соединение выводов дешифратора 72 между собой и с переключателем 1 режимов управления выполнено таким образом, чтобы при последовательном нрохожде НИИ сигналов через задакицие длительности t - tg реализовался универсальный алгоритм, автовождения на поворотной полосе. Звуковой сигнал генератора,74 извещает водителя о
том, что 77-80% Д-1ИНЫ траектории noворота уже пройдены в режиме автоматического управления движением, и устройство автоматически переключилось в режим ручного управления. Затем водитель заглубляет рабочие органы. Одновременно опускается рама со щупом-копиром, и водитель корректирует завершанадий участок траектори так, чтобы щуп-копир вошел в борозду. Образованную рабочей машиной при предьодущем проходе. Убевшись в .попадании щупа-копира в борозду, водитель нажимает кнопку на панели переключателя 1 режимов управления. Это приводит к подключению к блоку 4 реверсирования через переключатель 1 режимов управления- схемы 7 управления движением на рабочем гоне и 8 стабилизации направлякядих колес Схема 9 автоматической регулировки интенсивности и величины управляющего воздействия соединена с усилителем 5 и тактовым генератором 10 постоянно - на рабочем гоне и поворотной полосе, и работает в этих режимах одинаково.
Датчик 11 скорости выдает импульсы на входы тактового генератора 10 и блока 22 интегрирования. Тактовый генератор формирует прямоугольные импульсы, делит их частоту на постоянный коэффициент и передает на вход программного блока 2.Учитывая, что датчик 11 скорости считает зубьев шестерни привода вала отбора мощности, а последняя расположена на валу, связанном с задним мостОи и ведущими колесами трактора, частота импульсов всегда пропорциональна линейной скорости движения (без учета буксованияJ.
Таким образом реализуется зависимость
l/4t 0,5V,
где t - текущая длительность единицы измерения бортового времени, с .
Это позволяет автоматически корректировать программу поворота при отклонении фактической скорости V от исходной расчетной в диапазоне 1-3 м/с.
Блок 22 интегрирования преобразует частоту импульсов от датчика 11 скорости в постоянное напряжение. Постоянное напряжение, пропорциональ ное сзкоросТи, поступает на входи блоков 20 изменения интенсивности и 21 ограничения величины управляющего воздействия, где преобразуется в соответствии с ранее указанныют зависимостями
HV« А-Ли( v) (v)+ С иШ В2 u(v) + c,j.
Преобразование напряжения U и Ол поступают соответственно на входы частотно-импульсного регулятора 23 и сдвоенного компаратора 24. Частотно- импульсный регулятор 23 преобразует напряжение U(W) в частоту и в виде прямоугольных импульсов направляет их на .вход логических элементов ЗИ 38 и 39 усилителя 5. Импульсы имеют постоянну, не зави.сящую от частоты длитель Roc-i ь, При каждом импульсе происходит срабатывание электромагнита, открытие золотника распределителя гидро привода рулевого управления и пропускание в рабочий гидроцилиндр порции, масла. Чем больше частота, тем больше порций масла в единицу времени получает гйдроцилиндр и тем больше интенсивность управлягацегб воздействия на тракто). На входал сдвое ного компаратора 24 поступает напря , женйе как от блока 21 ограничения величины управляющего воздействия, так и от датчика 1 положения направляющих колее трактора. Как толь-г ко напряжение от датчика 17 положения направляющих колес сравняется с напряжением на выходе блока 21 ограяичения величины управляивдего воздействия, сдвоенный компаратор 24 выдает на одном из двух своих выходов электрический сигнал. СдвоенH dt компаратор 24 формирует управля 1ещне сигналы, соответствуювше макС1{мальвым значениям угла поворота НаяравляЁющих колес вправо или влево от их среднего положения, В зависимости от направления поворота колес При достижении максимального значеНИЯ угла срабатывают логические эле менты НЕ 25 или 26. Это приводит к oтк lIOчeнию сигналов на одном из . входов логических элементов ЗИ 38 или 39, отключению каналов 40 или 41 усилителя 5 и прекращению поворо Та колбе при сохранении возможности возврата их в среднее положение при поступлении соотйетствукяаего управляющего сигнала. Приотклонении продольной оск трактора от направления копируемой борозда предыдущего прохода повора чиваются подв1еска14У а-копира и чувствительная ось датчика 15 траек торией ошибки, что приводит к изменению напряжения на вьксйе датчи-f ка 15. Для исключения влияния случайных сигналов на процесс формиров НИН управлякйцего сигнала и сглажнва ния траекторий Последующ| х рабочих проходов cHrHaJM от датчика 15 тра-екторной сиаибки на вход арифмети ес кого блока 11 проходят через блок 1 интегрирован И1Я, представляквдий собо фильтр нижних частот. Изменение сиг нала с частотой менее 10 Гц мается сумматором 12 как постоянное напряжение. Блок 14 интегрирования пропускает от датчика 16 бокового крена колебания сигнала с частотой до 0,5 Гц, Таким образом, датчик 16 бокового крена реагирует только на изменение рельефа местности и не pea гирует на микронеровности поля. Изменение сигнала датчика 15 траекторной ошибки приводит к нарушению равенства сигналов, сумматор 12 тотчас выделяет разность и выдает на один из компараторов 18 или 19 электрический сигнал. ЛСомпаратор фор мирует релейный сигнал с уровнем логической 1 и передает его через схемл ИЛИ 32 или 33 переключатель1 режимов управления и схеме 8 стабили эации положения направляющих колес. Переключатель 1 режимов управления передает управлякиций сигнал через блок 4 реверсирования, элементы ЭЙ 38 или 39, каналы 40 или 41 усилителя 5 испол«1 тельному механизму 6. Это приводит к повороту направляюB3fffx колес, чувствительной оси датчика 17. положения направляющих колес и к изменению напряжения на выходе последнего. В момент, когда напряжение на выходе датчика 17 положения йащ авля«адих колес достигает .значения напряжения на выходе блока 13 интегрирования, сигнал на -выходе суКйла ора 12 становится равным О н компаратор 18 или 19 переходит На уровень логического О. Это приводит к отключению исполнительных механизмов и прекращению поворота направляющих колес. Одновременно логические схе№д НЕ 35- и 36 контролируют появление управлягацих сигналов на выходе cxeiuHa 7 управления движе.нием на рабочем гоне. При отключении обоих коЮТараторов 18 и 19 на обоих входах логического 2И 34 появляются сигна.лы, что приводит к выдаче логической 1 с выхода схемы 7 управления движением на рабочем гоне на входы элементов ЗИ 30 и 31. На два других входа элементов ЗИ 30 и 31 сигнал поступает при включении режима автовождения на гоне от переключателя 1 режимов управления, что делает возможным поступление сигнешов от компараторов 28 или 29 на вход переключателя 1 режикюв управления. Формирователь 27 управляющих сигналов №шолиен в виде операционного усилителя, на один вход которого от делителя подается напряжение, соответствуш{её напряжению на выходе дат чика 12 положения направляюищх колес в среднем положении, а на другой найряжение от последнего. Формирователь 27 управляющих сигналов сравнивает эти два напряжения и при их неравенстве; выдает, в соответствии со знаком, сипнал на один из компараторов 28 или 29. Компараторы 28 или 29 .преобразуют управляющий сигнал до
уровня: логической 1 и через логичё кие элементы ЗИ 30 или 31 вьщают его на вход переключателя 1 режимов управления Это приводит к включению исполнительных механизмов б и установке направляющих колес в среднее положение, после чего схема 8 стабилизации положения направляющих колес отключается.
При наличии бокового крена равенство напряжений датчиков 15, 16 и 17 в ари етической блоке 12 нарушае:тся в соответствии с изложенным ВК вочается исполнительный механизм б и направляиедие колеса трактора поворачиваются до тех пор, пока напряжения не сравняются. Далее трактор двигается поперек склона с направля{ацикш колесами, повернутыми в СТОРОНУ подьетла на угол, достаточный для компенсации бокового сползания. Через определенные промежутки времени cxetwa 8 стабилизации положения направляпцих колес возвращает направляйпше колеса в среднее положение,
поэтому средний у ол компенсации бокового сползания вдвое меньше максимального угла поворота.направляющих колес.
Применение предложенной системы позволяет повысить качество автоматизированного вождения машинно-тракторных агрегатов, так как блоки интегрирования, через KOTOE je сигналы траекторной ошибки и бокового крена поступают на вход арифметического блока, выполняют усреднение сигнала, и тем самым исключают влияние случайных ошибок, обусловленных искривлениями борозды, наличием комков почвы, остатков растений и .т.д. Кроме того, наличие переключателя ре кимов управления, программного блока, схемы упраиления движением на рабочем гоне и др. блоков в составе единой системы автовождения.позволяет автоматизировать управление движением и на рабочем гоне, и на поворот ной полосе, т.е. расширяет обладть применения.
73
т
1
J
П
,2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
