Изобретение относится к способам и устройствам для измерения высотно-скоростных параметров вертолета.
Известны способы и устройства для измерения высотно-скоростных параметров самолета, реализующие аэрометрический метод измерения. В таких устройствах приемник воздушного давления, установленный в набегающем на самолет воздушном потоке, воспринимает статическое и полное давление набегающего воздушного потока, по которым определяют барометрическую высоту, индикаторную (приборную) и, используя информацию о температуре наружного воздуха, - истинную воздушную скорость (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970, 392 с.) - [1]. С помощью установленных в набегающем потоке приемников также воспринимают давления, по которым определяют угловое положение вектора истинной воздушной скорости в связанной скоростной системе координат - углы атаки и скольжения (Петунин А.Н. Методы и техника измерения параметров газового потока. М.: Машиностроение, 1972, 392 с.) - [2]. Однако применение таких устройств на вертолете позволяет достаточно точно измерить барометрическую высоту и воздушную скорость только при скоростях полета более 50...70 км/час, когда приемники потока выходят за пределы вихревой колонны, создаваемой несущим винтом вертолета и когда обеспечивается помехоустойчивое восприятие и преобразование воспринимаемых воздушных давлений. Диапазон измерения углов атаки и скольжения указанных устройств также ограничен значениями ±30°, в то время как для вертолета рабочими являются полеты вперед-назад, вправо-влево, в ином другом направлении в плоскости рыскания и тангажа, а также полеты в области малых и околонулевых скоростей и даже на режиме висения.
Для получения информации о высотно-скоростных параметрах в области малых скоростей полета вертолета в известных системах воздушных сигналов (СВС) применяют несколько проточных приемников давления, размещаемых в носовой части фюзеляжа симметрично относительно продольной оси вертолета (Козицын В.К., Макаров Н.Н., Порунов А.А., Солдаткин В.М. Анализ принципов построения систем воздушных сигналов вертолета. // Авиакосмическое приборостроение, 2003, №10, С.2-13) - [3]. Экспериментальные исследования такой СВС, разработанной МПКБ "Восход", показали, что при скоростях полета менее 30 км/час погрешность измерения угла скольжения достигает около ±2°, а при скоростях более 70 км/час, когда носовая часть фюзеляжа вертолета, где установлены проточные приемники, выходит из зоны вихревой колонны, погрешность уменьшается до значений ±0,4°, приемлемых для решения задач управления и пилотирования. Однако одним из основных недостатков такой СВС и способа, реализованного в ней, является ограниченный диапазон измерения по углу скольжения значением β - ±20° - [1].
Известны способы, которые позволяют получать информацию о параметрах вектора воздушной скорости вертолета и при скоростях полета менее 30...70 км/ч. СВС вертолета, реализующая такой способ типа Lassie, ХМ-143 и СВС-В1 - [3], содержит свободно-ориентируемый приемник воздушных давлений, который при малых скоростях полета находится в створе вихревой колонны и ориентируется с помощью пространственного флюгера по направлению вектора  результирующего воздушного потока, набегающего на свободно-ориентированный приемник, являющегося суммой вектора
результирующего воздушного потока, набегающего на свободно-ориентированный приемник, являющегося суммой вектора  воздушной скорости, обусловленного поступательным движением вертолета, и вектора
воздушной скорости, обусловленного поступательным движением вертолета, и вектора  индуктивной скорости, создаваемой несущим винтом вертолета. В этом случае система уравнений, по которым определяют составляющие Vx, Vy, Vz вектора истинной воздушной скорости
индуктивной скорости, создаваемой несущим винтом вертолета. В этом случае система уравнений, по которым определяют составляющие Vx, Vy, Vz вектора истинной воздушной скорости  углы атаки α и скольжения β вертолета имеют вид (Козицын В.К. Алгоритмическое обеспечение систем воздушных сигналов вертолета на основе свободно-ориентированного приемника давлений. // Изв. вузов. Авиационная техника. 2004. №4. С.52-57) - [4]:
углы атаки α и скольжения β вертолета имеют вид (Козицын В.К. Алгоритмическое обеспечение систем воздушных сигналов вертолета на основе свободно-ориентированного приемника давлений. // Изв. вузов. Авиационная техника. 2004. №4. С.52-57) - [4]:

где iz, ix - углы наклона плоскости диска несущего винта; αВК и βВК - углы скоса воздушного потока вихревой колонны относительно осей связанной (скоростной) системы координат.
Однако, как видно из системы уравнений (1), такая система имеет значительные погрешности определения параметров Vx, Vy, Vz, α и β вектора истинной воздушной скорости вертолета в области малых скоростей из-за отсутствия в полете точной информации о текущей величине (о модуле) вектора индуктивной скорости  и углах положения iz, ix диска несущего винта. При этом точность измерения углов αВК и βВК скоса воздушного потока вихревой колонны, определяемых по угловому положению свободно-ориентируемого приемника относительно осей скоростной системы координат, также существенно влияет на погрешности измерения параметров вектора воздушной скорости вертолета. Так как в процессе работы системы углы αВК и βВК определяются путем регистрации углового положения вектора
и углах положения iz, ix диска несущего винта. При этом точность измерения углов αВК и βВК скоса воздушного потока вихревой колонны, определяемых по угловому положению свободно-ориентируемого приемника относительно осей скоростной системы координат, также существенно влияет на погрешности измерения параметров вектора воздушной скорости вертолета. Так как в процессе работы системы углы αВК и βВК определяются путем регистрации углового положения вектора  результирующего воздушного потока вихревой колонны, то из-за малости флюгерного момента и наличия трения в кардановом подвесе и нагружения подвижной системы свободно-ориентируемого приемника в области малых скоростей полета имеет место дополнительная погрешность, что увеличивает значение минимальной рабочей скорости полета, при которой система обеспечивает устойчивое измерение высотно-скоростных параметров вертолета.
результирующего воздушного потока вихревой колонны, то из-за малости флюгерного момента и наличия трения в кардановом подвесе и нагружения подвижной системы свободно-ориентируемого приемника в области малых скоростей полета имеет место дополнительная погрешность, что увеличивает значение минимальной рабочей скорости полета, при которой система обеспечивает устойчивое измерение высотно-скоростных параметров вертолета.
За прототип взят способ измерения воздушных сигналов, реализованный в системе воздушных сигналов вертолета, построенной на основе неподвижного многоканального проточного аэрометрического приемника и струйно-конвективных (термоамометрических) измерительных каналов (Порунов А.А., Солдаткин В.В. Структура и алгоритмы системы воздушных сигналов вертолета на основе многофункционального аэрометрического преобразователя. // Сборник материалов Второго Международного симпозиума "Авиакосмические приборные технологии", 17-20 сентября 2002 г. Санкт-Петербург. СПбГУАП. С.33-35) - [5].
В основу такого способа измерения воздушных сигналов положена обработка массива первичных информативных сигналов-давлений, воспринимаемых неподвижным проточным многоканальным аэрометрическим приемником, выполненным, например, согласно патенту РФ №2042137, МПК G01P 5/16, Многоканальный аэрометрический преобразователь. // Порунов А.А., Олин В.Н., Захарова Н.С. - [6].
Для восприятия информации о параметрах вектора воздушной скорости вертолета с помощью двух профилированных дисков (Фиг.1) в набегающем воздушном потоке в плоскости рыскания выделяют плоскопараллельную воздушную струю, параметры которой зависят от величины и угла направления вектора истинной воздушной скорости вертолета в плоскости рыскания в диапазоне ±180°. С помощью расположенного между двумя профилированными дисками аэродинамического тела с установленными на нем трубками полного давления и кольцевых приемников дросселированного статического давления, расположенных на внутренних поверхностях профилированных дисков, формируют давления рi и рc, пропорциональные величине истинной воздушной скорости  углам скольжения β и атаки α вектора истинной воздушной скорости Vв и статическому давлению плоскопараллельной воздушной струи, преобразуют давления в электрические сигналы с помощью пневмоэлектрических, например термоанемометрических, преобразователей, по которым определяют высотно-скоростные параметры вертолета путем восстановления и обработки первичных пневматических сигналов-давлений по определенному алгоритму - [6].
углам скольжения β и атаки α вектора истинной воздушной скорости Vв и статическому давлению плоскопараллельной воздушной струи, преобразуют давления в электрические сигналы с помощью пневмоэлектрических, например термоанемометрических, преобразователей, по которым определяют высотно-скоростные параметры вертолета путем восстановления и обработки первичных пневматических сигналов-давлений по определенному алгоритму - [6].
Важной особенностью угловых характеристик проточного многоканального аэрометрического приемника потока (АМП) является то, что эти характеристики содержат два участка: в пределах первого - воспринимаемое давление рi АМП больше местного статического давления рc, а в пределах второго - это давление рi меньше рc.
На Фиг.2 приведено семейство угловых характеристик многоканального проточного АМП, имеющего шесть идентичных секций восприятия параметров вектора воздушной скорости вертолета, которое построено для трех значений скорости: V=3 м/с, V=15 м/с, V=30 м/с - [5, 6]. Анализ этих графиков позволяет отметить, что угловые характеристики трубок полного давления i-1 и i+1 в области давлений рi<рс имеют точку пересечения, угловые координаты которой совпадают с координатой максимума угловой характеристики трубки полного давления с номером i. Пересекающиеся ветви угловых характеристик i-1 и i+1 трубок полного давления имеют участки достаточной протяженности, в пределах которых можно их аппроксимировать с использованием математических методов, надежно реализуемых программными средствами, например с использованием сплайн-методов. Указанные особенности угловых характеристик многоканального проточного АМП положены в основу алгоритма обработки первичных пневматических сигналов-давлений, которые обеспечивают определение величины и угла направления вектора истинной воздушной скорости вертолета.
Информацию о величине и угле направления вектора истинной воздушной скорости вертолета получают путем математической обработки первичных пневматических сигналов-давлений согласно алгоритму, в основу которого положена связь отношения  текущих значений давлений pi+1 и pi соседних трубок полного давления с угловым положением β вектора истинной воздушной скорости вертолета.
текущих значений давлений pi+1 и pi соседних трубок полного давления с угловым положением β вектора истинной воздушной скорости вертолета.
При практической реализации алгоритма вводят безразмерную систему координат, абсциссой которой является безразмерная угловая координата Θ, а ординатой - отношение  , как показано на Фиг.3.
, как показано на Фиг.3.
Пределы изменения Θ определяют выбором координатной сетки (например, Θmax=3 при шаге сетки t0=10 град., Θmax=6 при t0=5 град.). Начало координат введенной системы координат совпадает с точкой пересечения смежных ветвей угловых характеристик i+1 и i-й трубок полного давления.
Алгоритм обработки массива i пневматических сигналов (i=0, 1, ...5) предусматривает следующие этапы. На первом этапе определяют номер i-й трубки полного давления, в пределах положительных ветвей которой локализовано направление вектора воздушной скорости вертолета. За такую i-ую трубку полного давления, как следует из Фиг.3, принимают трубку, в которой значение измеренного давления является наибольшим. По номеру такой i-ой трубки полного давления определяют первое приближение угловой координаты вектора воздушной скорости вертолета в соответствии с выражением

При этом принимается, что ось первой трубки совпадает с началом исходной системы координат.
Затем проводят предварительную оценку положения вектора воздушной скорости вертолета относительно i-й трубки полного давления. С этой целью проверяют, какое из неравенств:

выполняется.
В случае выполнения первого неравенства вектор воздушной скорости вертолета находится слева от i-й трубки полного давления и параметр k оценки углового положения вектора воздушной скорости относительно оси i-й трубки полного давления принимает значение k=-1. Если выполняется выражение (3), то вектор воздушной скорости вертолета находится справа от i-й трубки и k=+1.
На следующем этапе процесса обработки измеренных давлений определяют текущее значение угловой координаты Θ вектора воздушной скорости вертолета во введенной системе координат путем решения следующих уравнений:

где f(Θ) и f(-Θ) - полиномы степени n, вычисляемые по результатам предварительной градуировки многоканального проточного АМП и аппроксимации угловой характеристики i-й трубки полного давления в диапазоне Θ∈[Θmin, Θmax] на основе выбранной сплайн-функции. При этом первое соотношение выражения (4) используется при выполнении условия pi-1>pi+1 а второе - при pi-1<pi+1. Причем в используемой безразмерной системе координат функция ƒ(Θ) описывает часть правой ветви угловой характеристики Фиг.3, a f(-Θ) - левую часть этой характеристики.
Далее угловую координату Ψx вектора воздушной скорости вертолета в исходной (связанной скоростной) системе координат определяют как

где t0 - шаг координатной сетки во введенной системе координат (Фиг.3) Ψx∈[Θmax-Θmin].
После определения угла направления Ψx вектора воздушной скорости вертолета вычисляют значение давления рm, соответствующее модулю вектора воздушной скорости, в соответствии со следующими соотношениями:

Заключительным этапом алгоритма обработки исходного массива пневматических сигналов является вычисление величины Vв вектора воздушной скорости вертолета, которую определяют на основании предварительной градуировки АМП по графику изменения полного рn и статического рc давлений, приведенному на Фиг.4.
Профилирование внутренних поверхностей экранирующих дисков многоканального проточного АМП по контуру, близкому к профилю Вентури, позволяет не только провести мультиплицирование скоростей в месте размещения трубок полного давления, но и вписать в поверхность входных кромок с достаточно большой кривизной образующих приемные отверстия (Фиг.1) для определения второй координаты пространственного набегающего потока, например угла атаки вертолета. В этом случае значение угла атаки α определяют в соответствии с соотношением [2]

где 2Θ0 - угол расположения приемных отверстий по каналу угла атаки;  - давления, воспринимаемые соответствующими приемниками давления на верхнем и нижнем дисках; α - угол атаки вертолета.
- давления, воспринимаемые соответствующими приемниками давления на верхнем и нижнем дисках; α - угол атаки вертолета.
Таким образом, обработка массива первичных пневматических сигналов-давлений проточного многоканального аэрометрического приемника согласно алгоритму, предложенному в [6], позволяет существенно расширить диапазон измерения параметров вектора воздушной скорости вертолета, получать информацию о его пространственном положении - угол скольжения β и угол атаки α.
Преобразование первичных информативных сигналов-давлений рi в удобные для последующей обработки электрические сигналы осуществляют посредством пневмоэлектрических, например термоанемометрических, измерительных преобразователей (Ференец В.А. Полупроводниковые струйные термоанемометры. М.: Энергия, 1972, 112 с.) - [7].
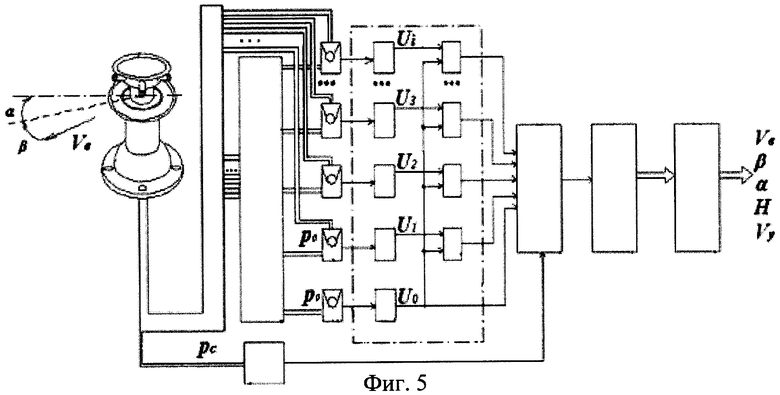
На Фиг.5 приведена структурная схема системы воздушных сигналов вертолета на основе неподвижного многоканального проточного аэрометрического приемника и термоанемометрических измерительных преобразователей (каналов), выполненная согласно способу-прототипу (Порунов А.А., Солдаткин В.В. Структура и алгоритмы системы воздушных сигналов вертолета на основе многофункционального аэрометрического преобразователя. // Сборник материалов Второго Международного симпозиума "Авиакосмические приборные технологии", 17-20 сентября 2002 г. Санкт-Петербург. СПбГУАП. С.33-35) - [5].
Система содержит расположенный в плоскости рыскания неподвижный многоканальный аэрометрический приемник (АМП), полости давлений рi, воспринимаемых трубками полного давления, которого соединены пневматическими каналами с входом осредняющей камеры и с входом термоанемометрических преобразователей (ТАП). Полость статического давления рc АМП пневматическим каналом связана с входом пневмоэлектрического преобразователя (датчика) статического давления, формирующего электрический сигнал Uс, пропорциональный статическому давлению рc. На выходе осредняющей камеры формируется опорное давление рo, которое по пневмоканалам подается на другие входы ТАП и на вход компенсационного ТАП, на выходе электроизмерительной схемы которого формируется компенсационный (опорный) сигнал Uо. Электроизмерительные схемы ТАП формируют электрические сигналы Ui, пропорциональные давлениям рi. Выходы электроизмерительных схем ТАП соединены со входами схем обработки аналоговых сигналов, другие входы которых соединены с выходом электроизмерительной схемы компенсационного ТАП. Компенсационный сигнал Uo используется в качестве опорного для реализации в электронном блоке дифференциального способа обработки аналоговых сигналов Ui в схемах, что позволяет уменьшить погрешность из-за изменения параметров окружающей среды. Выходы схем обработки аналоговых сигналов подключены к мультиплексору, соединенному с аналого-цифровым преобразователем (АЦП), подключенным к микропроцессору.
При работе системы воспринимаемые АМП давления рi с помощью ТАП и электроизмерительных схем преобразуются в электрические сигналы Ui, пропорциональные давлениям рi, которые через схемы обработки аналоговых сигналов, мультиплексор и АЦП поступают в микропроцессор. Микропроцессор, обрабатывая поступившие сигналы в соответствии с вышеприведенными алгоритмами, формирует выходные сигналы по величине воздушной скорости Vв, углу атаки α и углу скольжения β. Обрабатывая сигнал Uo с выхода датчика статического давления, на выходе микропроцессора формируется выходной сигнал по барометрической высоте полета H и вертикальной скорости Vy=dH/dt.
Применение неподвижного проточного многоканального аэрометрического приемника позволяет расширить диапазон измерения по углу скольжения до ±180°, обеспечить помехоустойчивое измерение угла атаки, воздушной скорости, барометрической высоты и вертикальной скорости вертолета, в том числе при малых скоростях полета. При этом использование термоанемометрических измерительных каналов преобразования аэрометрических сигналов-давлений в электрический сигнал благодаря их высокой чувствительности в диапазоне малых перепадов давлений позволяет расширить нижнюю границу рабочих скоростей полета до 3...5 км/ч - [6].
Недостатком способа и системы измерения воздушных сигналов вертолета является узкий диапазон измерения угла атаки вертолета, ограниченный значениями ±30...40° [2]. Кроме того, при малых скоростях полета, когда неподвижный многоканальный аэрометрический приемник находится в створе вихревой колонны и аэродинамическое поле вблизи вертолета сильно возмущено индуктивным потоком несущего винта, выделение статического давления рc становится невозможным, особенно при изменении угла атаки вертолета в широком диапазоне. Отсутствие помехоустойчивой информации о статическом давлении приводит к значительным погрешностям определения барометрической высоты Н=f(рс) и вертикальной составляющей вектора истинной воздушной скорости вертолета Vy=dH/dt.
Необходимо отметить, что инструментальные погрешности системы воздушных сигналов, реализующей данный способ измерения, которые обусловлены неидентичностью (разбросом) и нестабильностью характеристик пневмоэлектрических, например термоанемометрических, преобразователей легко устраняются при реализации адаптивной автоматической подстройки их измерительных каналов (Патент РФ №41875 на полезную модель. Система воздушных сигналов вертолета. МПК G01P 5/00. // Солдаткин В.В., Солдаткин В.М., Порунов А.А. Опубл. БИ №31, 2004) - [8].
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении точности измерения высотно-скоростных параметров вертолета в области малых скоростей полета за счет получения и использования дополнительной информации об угловом положении (углах скоса) вихревой колонны несущего винта вертолета и за счет повышения помехоустойчивости воспринимаемого статического давления к пульсациям вектора скорости индуктивного потока несущего винта и к изменению угла атаки вертолета в широком диапазоне.
Использование предложенного способа измерения и системы воздушных сигналов вертолета позволяет повысить безопасность полета и эффективность решения пилотажно-навигационных и боевых задач, например точности стрельбы и бомбометания, за счет высокоточного и всенаправленного (при изменении положения вертолета в трехмерном пространстве) определения высотно-скоростных параметров вертолета в широком диапазоне скоростей, включая область малых и околонулевых скоростей полета.
Технический результат достигается тем, что по способу измерения воздушных сигналов вертолета, по которому в плоскости рыскания выделяют плоскопараллельную воздушную струю, в которой формируют давления, соответствующие дросселированному статическому давлению, и давления, характеризующие угол скоса плоскопараллельной струи, преобразуют давления в электрические сигналы, по которым определяют высотно-скоростные параметры вертолета, новым является то, что дополнительно выделяют воздушную струю в ортогональной плоскости, перпендикулярной плоскости рыскания, в которой формируют и преобразуют в электрические сигналы давления, характеризующие дросселированное статическое давление и угол скоса ортогональной плоскопараллельной воздушной струи, определяют углы скоса вихревой колонны несущего винта, по которым в области малых скоростей полета вычисляют составляющие вектора воздушной скорости и определяют высотно-скоростные параметры вертолета согласно системе уравнений

где Vx, Vy, Vz - составляющие вектора воздушной скорости вертолета на оси связанной скоростной системы координат; βВК и αВК - углы скоса вихревой колонны в плоскости рыскания и в ортогональной к ней плоскости; aβ и aα - коэффициенты связи боковой Vz и продольной Vx составляющих вектора  воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; H, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; H, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
При реализации способа в системе воздушных сигналов вертолета, содержащей установленный в плоскости рыскания проточный многоканальный аэрометрический приемник, полости дросселированного статического давления и трубок полного давления которого соединены с пневмоэлектрическими преобразователями, выходы электроизмерительных схем которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам вертолета, новым является то, что в нее дополнительно введен расположенный ортогонально второй проточный многоканальный аэрометрический приемник, полости дросселированного давления и трубок полного давления которого соединены с дополнительными пневмоэлектрическими преобразователями, выходы электроизмерительных схем которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены ко входам микропроцессора для определения в области малых скоростей полета углов скоса вихревой колонны несущего винта вертолета, вычисления составляющих вектора воздушной скорости и определения высотно-скоростных параметров вертолета, согласно системе уравнений

где Vx, Vy, Vz - составляющие вектора воздушной скорости вертолета на оси связанной скоростной системы координат; βВК и αВК - углы скоса вихревой колонны в плоскости рыскания и в ортогональной к ней плоскости; aβ и aα - коэффициенты связи боковой Vz и продольной Vx составляющих вектора  воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; H, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками. Пневмоэлектрические преобразователи выполнены термоанемометрическими.
воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; H, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками. Пневмоэлектрические преобразователи выполнены термоанемометрическими.
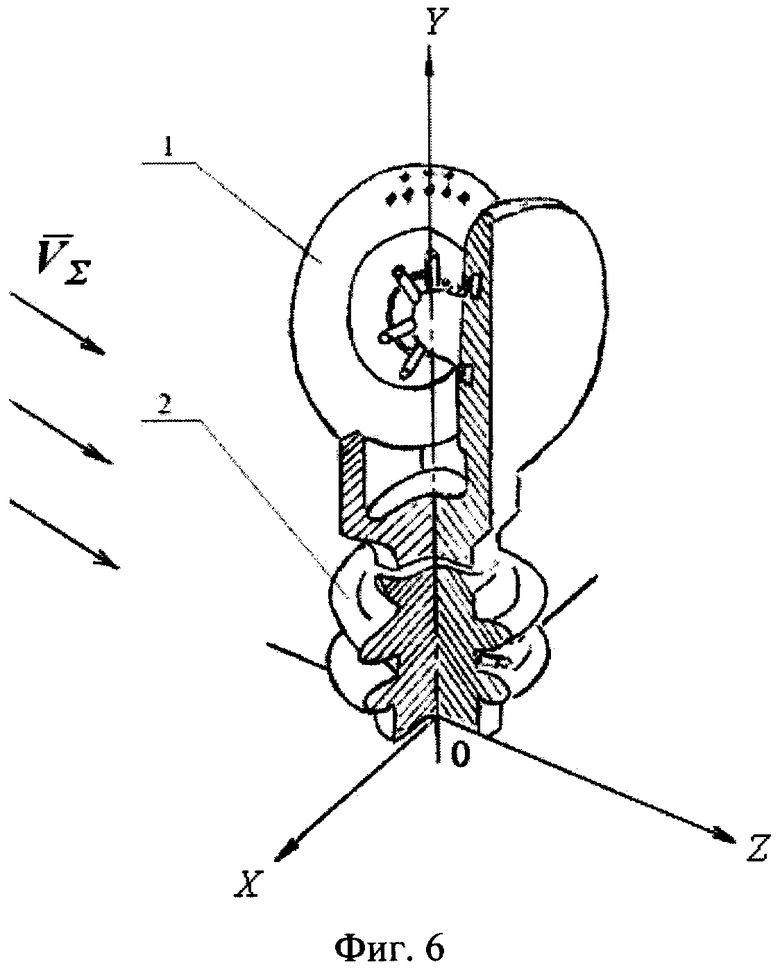
Сущность изобретения поясняется на Фиг.6 и 7.
На Фиг.6 представлен общий вид аэрометрического блока системы воздушных сигналов вертолета в виде двух ортогонально расположенных многоканальных аэрометрических приемников 1, 2, который позволяет измерить угловое положение (углы скоса) вектора воздушной скорости  вихревой колонны несущего винта вертолета в продольной и вертикальной плоскостях связанной скоростной системы координат.
вихревой колонны несущего винта вертолета в продольной и вертикальной плоскостях связанной скоростной системы координат.
На Фиг. 7 представлена структурно-функциональная схема системы воздушных сигналов вертолета, реализующая предлагаемый способ с использованием термоанемометрических преобразователей.
Здесь 1, 2 - ортогонально расположенные аэрометрические приемники; 3 - трубки полного давления; 4 - полости статического давления; 5 - осредняющая камера; 6 - термоанемометрический преобразователь статического давления; 7 - термоанемометрические преобразователи давлений, воспринимаемых трубками полного давления; 8 - электроизмерительные схемы; 9 - схемы обработки аналоговых сигналов; 10 - мультиплексор; 11 - аналого-цифровой преобразователь; 12 - микропроцессор.
Система содержит расположенный в плоскости рыскания неподвижный многоканальный аэрометрический приемник 1 и расположенный ортогонально приемнику 1 в плоскости, перпендикулярной плоскости рыскания, неподвижный многоканальный аэрометрический приемник 2. Давления рi воспринимаются трубками полного давления 3. Полости дросселированных статических давлений pст.т, воспринимаемых кольцевыми приемниками 4, подключены к осредняющей камере 5, связанной с пневмоэлектрическим (например, термоанемометрическим) преобразователем 6, на выходе которого формируется электрический сигнал U0, пропорциональный осредненному статическому давлению рc. Трубки полного давления 4 соединены со входами пневмоэлектрических преобразователей 7, электроизмерительные схемы 8 которых формируют электрические сигналы U1, U2, ..., Ui, пропорциональные давлениям рi. Выходы электроизмерительных схем 8 соединены со входами схем обработки аналоговых сигналов 9, другие входы которых соединены с выходом термоанемометрического преобразователя 6, формирующего электрический сигнал U0, пропорциональный статическому давлению рc. Сигнал U0 используется в качестве опорного для реализации дифференциального способа обработки аналоговых сигналов Ui в схемах 9, что позволяет уменьшить влияние параметров окружающей среды. Выходы схем обработки аналоговых сигналов 9 через последовательно соединенные мультиплексор 10 и аналого-цифровой преобразователь 11 подключены к микропроцессору 12 для определения углов положения вихревой колонны несущего винта вертолета, используемых при вычислении составляющих вектора воздушной скорости и определении высотно-скоростных параметров вертолета.
При реализации способа измерения воздушных сигналов вертолета проточный многоканальный аэрометрический приемник 1 (Фиг.6) в плоскости рыскания выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю, в которой формирует давления, пропорциональные дросселированному статическому давлению рc, и давления pi, характеризующие угол скоса плоскопараллельной воздушной струи в плоскости рыскания. С помощью пневмоэлектрических преобразователей 6, 7 и электроизмерительных схем 8 (Фиг.7) воспринимаемые давления рc и рi преобразуют в электрические сигналы Ui, которые через мультиплексор 10 и аналого-цифровой преобразователь 11 вводят в микропроцессор 12. Проточный многоканальный аэрометрический приемник 2 (Фиг.6) выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю в плоскости, ортогональной плоскости рыскания, в котором формируют и преобразуют в электрические сигналы (Фиг.7) давления, характеризующие дросселированное статическое давление и угол скоса ортогональной плоскопараллельной воздушной струи, которые через последовательно соединенные мультиплексор 10 и аналого-цифровой преобразователь 11 вводят в микропроцессор 12. Микропроцессор обрабатывает введенные электрические сигналы и определяет углы скоса вихревой колонны, по которым вычисляет составляющие вектора воздушной скорости и определяет высотно-скоростные параметры вертолета.
При установке аэрометрического блока, выполненного в виде двух ортогонально расположенных проточных многоканальных аэрометрических приемников, в носовой части фюзеляжа вертолета имеют место два характерных режима обтекания набегающим воздушным потоком.
При скоростях полета более 50...70 км/ч, когда аэрометрический блок находится вне вихревой колонны несущего винта, составляющие Vx, Vy, Vz вектора воздушной скорости  на оси связанной скоростной системы координат определяются в соответствии с системой уравнений вида
на оси связанной скоростной системы координат определяются в соответствии с системой уравнений вида
где β=ψβ и α=ψα - углы скольжения и атаки вертолета, равные углам скоса плоскопараллельной воздушной струи в плоскости рыскания ψβ и воздушной струи в ортогональной с ней плоскости ψα.
Модуль (величина) вектора истинной воздушной скорости вертолета  определяется по соотношению
определяется по соотношению

Барометрическая высота Н определяется по информации о величине дросселированного статического давления рс.т, получаемой от многоканальных аэрометрических приемников, по соотношению

где R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; p0 и Т0 - статическое давление и температура на уровне земли.
В области малых скоростей полета, когда аэрометрический блок с проточными многоканальными аэрометрическими приемниками находится в створе вихревой колонны несущего винта вертолета, за меру величин составляющих вектора истинной воздушной скорости вертолета используется угловое положение воздушного потока вихревой колонны несущего винта вертолета, определяемое углами скоса βВК=ψβ и αВК=ψα, которые регистрируются ортогонально расположенными проточными многоканальными приемниками и определяются в соответствии с уравнением вида (5).
Как показали исследования (Kaletka J. Evaluation of the Helicopter Low Airspeed System Lassie. // Jornal of American Helicopter Society, 1983, №4, p.p.35-43) - [9], угловое положение вихревой колонны вертолета при полете на малых скоростях можно представить в виде
где  и аα, aβ - функции и коэффициенты, определяемые по результатам летных испытаний данного типа вертолета.
и аα, aβ - функции и коэффициенты, определяемые по результатам летных испытаний данного типа вертолета.
При этом для каждого значения αВК, находящегося в зоне вихревой колонны, можно определить два значения βВКmax и βВКmin, определяющих границы углового положения вихревой колонны в ортогональной плоскости. Следовательно, за критерий нахождения аэрометрического блока в зоне вихревой колонны для каждого значения αВК можно использовать условие

При соблюдении этого условия, т.е. при полете вертолета на малых скоростях, алгоритмы определения высотно-скоростных параметров вертолета имеют вид

где аp - коэффициент связи вертикальной скорости со скоростью изменения статического давления.
В случае невыполнения условия (12) вихревая колонна не охватывает планер вертолета и полет осуществляется в режиме, когда аэрометрический блок с многоканальными аэрометрическими приемниками вышел за пределы вихревой колонны.
Система воздушных сигналов вертолета работает следующим образом.
Неподвижный аэрометрический блок (Фиг.6), состоящий из двух ортогонально расположенных проточных многоканальных аэрометрических приемников 1, 2, устанавливают на фюзеляже вертолета и ориентируют по осям связанной скоростной системы координат.
При работе системы проточный многоканальный аэрометрический приемник 1 (Фиг.7) в плоскости рыскания выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю, в которой формирует давления, пропорциональные дросселированному статическому давлению pст.т, и давления рi, характеризующие угол скоса плоскопараллельной воздушной струи (потока). С помощью пневмоэлектрических, например термоанемометрических, преобразователей 6, 7 и схем 8, 9 воспринимаемые давления рc и рi преобразуют в электрические сигналы Ui, которые через мультиплексор 10 и аналого-цифровой преобразователь 11 вводятся в микропроцессор 12. Проточный многоканальный аэрометрический приемник 2 выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю в плоскости, ортогональной плоскости рыскания, в которой формируют и преобразуют в электрические сигналы давления, характеризующие дросселированное статическое давление рст.т, и давления рi, характеризующие угол скоса ортогональной плоскопараллельной воздушной струи, которые через мультиплексор 10 и аналого-цифровой преобразователь 11 (Фиг.7) вводят в микропроцессор 12. Микропроцессор обрабатывает введенные электрические сигналы по разработанным алгоритмам, вычисляет углы положения (скоса) вихревой колонны, по которым вычисляет составляющие вектора воздушной скорости и определяет высотно-скоростные параметры вертолета при малых скоростях полета.
Следует отметить, что в такой системе воздушных сигналов вертолета также существенно повышается точность восприятия статического давления рc, так как аэрометрический блок в виде двух ортогонально расположенных проточных многоканальных аэрометрических приемников позволяет:
- сформировать плоскопараллельные воздушные струи в пределах плоскостей правого и левого экранирующих дисков многоканальных аэрометрических приемников и выполнить пространственное осреднение сигнала статического давления за счет размещения приемных отверстий статического давления по окружности и использования осредняюшей канавки;
- уменьшить влияния угла скольжения β за счет расположения приемных отверстий статического давления на правом и левом экранирующих дисках;
- сгладить пульсации статического давления за счет увеличения числа местных статических давлений  , воспринимаемых на двух ортогонально расположенных многоканальных аэрометрических приемниках.
, воспринимаемых на двух ортогонально расположенных многоканальных аэрометрических приемниках.
Таким образом, выделение с помощью ортогонально расположенных проточных многоканальных аэрометрических приемников двух плоскопараллельных воздушных струй в плоскости рыскания и в ортогональной ей плоскости, формирование в них давлений, характеризующих дросселированное статическое давление в струях и давления, характеризующие их углы скоса, преобразование давлений в электрические сигналы с помощью пневмоэлектрических, например термоанемометрических, преобразователей и последовательное определение углов скоса вихревой колонны несущего винта и составляющих вектора воздушной скорости вертолета позволяет повысить точность измерения высотно-скоростных параметров, расширить рабочие диапазоны по углу атаки и по скорости, особенно в области малых и околонулевых скоростей полета.
Применение системы воздушных сигналов, реализующей предложенный способ измерения, позволяет повысить безопасность управления и пилотирования вертолета, повысить эффективность выполнения пилотажно-навигационных и специальных задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
Изобретение предназначено для измерения высотно-скоростных параметров вертолета. В способе измерения воздушных сигналов вертолета в плоскости рыскания и ортогональной с ней плоскости выделяют две плоскопараллельные ортогональные воздушные струи, формируют дросселированные статические давления и давления, характеризующие углы скоса плоскопараллельных воздушных струй, преобразуют давления в электрические сигналы, по которым определяют углы скоса вихревой колонны несущего винта вертолета, вычисляют составляющие вектора воздушной скорости и определяют высотно-скоростные параметры вертолета при малых скоростях полета. Система воздушных сигналов вертолета содержит два ортогонально расположенных проточных многоканальных аэрометрических приемника, полости дросселированного статического давления и трубок полного давления которых соединены с пневмоэлектрическими, например термоанемометрическими, преобразователями, выходы электроизмерительных схем которых через мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, в котором определяют углы скоса вихревой колонны несущего винта вертолета, которые используются при вычислении составляющих вектора воздушной скорости и определении высотно-скоростных параметров вертолета на малых скоростях полета. Технический результат заключается в повышении точности измерения высотно-скоростных параметров вертолета, расширении рабочих диапазонов по углу атаки и скорости, особенно в области малых скоростей полета, что позволяет повысить безопасность управления и пилотирования вертолета, эффективность решения пилотажно-навигационных и специальных задач. 2 н. и 1 з.п. ф-лы, 7 ил.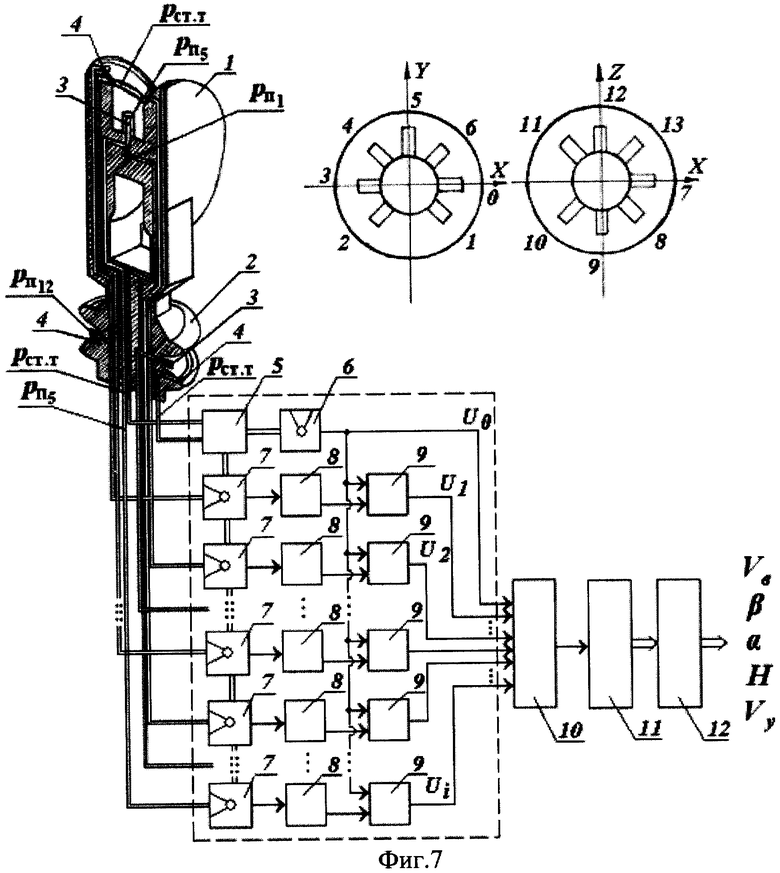

где Vx, Vy, Vz - составляющие вектора воздушной скорости вертолета на оси связанной скоростной системы координат; βВК и αВК - углы скоса вихревой колонны в плоскости рыскания и в ортогональной к ней плоскости; aβ и аα - коэффициенты связи боковой Vz и продольной Vx составляющих вектора  воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; Н, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; Н, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рс.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.

где Vx, Vy, Vz - составляющие вектора воздушной скорости вертолета на оси связанной скоростной системы координат; βвк и αвк - углы скоса вихревой колонны в плоскости рыскания и в ортогональной к ней плоскости; аβ и аα - коэффициенты связи боковой Vz и продольной Vx составляющих вектора  воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; Н, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рc.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
воздушной скорости вертолета с углами скоса βВК и αВК вихревой колоны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; аp - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления рс.т; Н, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; р0 и Т0 - статическое давление и температура на уровне земли; рc.т - дросселированное статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
| МНОГОКАНАЛЬНЫЙ АЭРОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1993 |
|
RU2042137C1 |
| Клещевидный висячий замок | 1934 |
|
SU41875A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| US 6038932 A, 21.03.2000 | |||
| US 5648604 A, 15.97.1997. | |||

