Изобретение относится к измерительной технике и может быть использовано для измерения высотно-скоростных параметров вертолета.
Известен способ измерения высотно-скоростных параметров самолета, в котором измеряемые параметры определяют по параметрам набегающего воздушного потока, которые воспринимают с помощью распределенных по фюзеляжу самолета приемника воздушных давлений (полного и статического давлений), приемника температуры торможения набегающего воздушного потока, аэрометрических приемников или флюгерных датчиков аэродинамических углов атаки и скольжения. (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970, 392 с. - [1]; Петунии А.Н. Методы и техника измерения параметров газового потока. М.: Машиностроение, 1972, 392 с. - [2]).
Недостатком данного способа является низкая точность и помехоустойчивость измерения высотно-скоростных параметров на вертолете при скоростях полета менее 70…90 км/ч, когда приемники параметров набегающего воздушного потока находятся в зоне действия вихревой колонны несущего винта и воспринимаемые параметры набегающего воздушного потока подвергаются значительным аэродинамическим возмущениям, вносимыми индуктивными потоками несущего винта. Рабочие диапазоны аэрометрических приемников и флюгерных датчиков аэродинамических углов атаки и скольжения также ограничены значениями ±30°, в то время, как для вертолета рабочими являются полеты вперед-назад, вправо-влево, в ином другом направлении в плоскости рыскания и тангажа, а также полеты в области малых и околонулевых скоростей и даже на режиме висения при изменении угла скольжения в диапазоне ±180°.
Частично устранить указанные выше недостатки можно путем использования способа измерения высотно-скоростных параметров вертолета, в котором восприятие параметров набегающего воздушного потока производят с помощью свободно ориентируемого приемника воздушных давлений, который при малых скоростях полета находится в зоне вихревой колонны несущего винта и с помощью пространственного флюгера, установленного в кардановом подвесе, ориентируется по направлению вектора скорости результирующего воздушного потока, набегающего на приемник. При этом регистрируют углы поворота осей флюгера, равные углам скоса воздушного потока вихревой колонны несущего винта относительно осей связанной системы координат, по которым определяют величину Vв, составляющие Vx, Vy, Vz вектора  истинной воздушной скорости, аэродинамические углы атаки α и скольжения β согласно уравнениям (Козицин В.К. Алгоритмическое обеспечение системы воздушных сигналов вертолета на основе свободно ориентированного приемника // Известия вузов. Авиационная техника. 2004. №4. С 52-57 - [3]):
истинной воздушной скорости, аэродинамические углы атаки α и скольжения β согласно уравнениям (Козицин В.К. Алгоритмическое обеспечение системы воздушных сигналов вертолета на основе свободно ориентированного приемника // Известия вузов. Авиационная техника. 2004. №4. С 52-57 - [3]):
где αвк и βвк - углы скоса воздушного потока вихревой колонны относительно осей связанной системы координат; ix, iy - углы наклона плоскости диска несущего винта;  - величина результирующего воздушного потока, набегающего на приемник в зоне вихревой колонны несущего винта;
- величина результирующего воздушного потока, набегающего на приемник в зоне вихревой колонны несущего винта;  - модуль вектора скорости индуктивного потока несущего винта.
- модуль вектора скорости индуктивного потока несущего винта.
Однако недостатком способа измерения высотно-скоростных параметров вертолета с использованием свободно ориентированного приемника воздушных давлений являются значительные погрешности определения параметров вектора истинной воздушной скорости (Vx, Vy, Vz, Vв, α и β) в области малых и особенно околонулевых скоростей из-за значительных погрешностей регистрации углов скоса вихревой колонны αвк и βвк, обусловленных малостью флюгерного момента, создаваемого пространственным флюгером, наличия трения в кардановом подвесе и нагружения подвижной системы свободно ориентируемого приемника воздушных давлений. Это также ограничивает значение минимальной рабочей скорости полета, при которой обеспечивается устойчивое измерение параметров вектора истинной воздушной скорости и других высотно-скоростных параметров вертолета. Необходимость передачи воспринимаемых воздушных давлений с вращающегося ориентируемого приемника с помощью пневмоколлектора и преобразования углов ориентации подвижного приемника в электрические сигналы с использованием сельсинных преобразователей усложняет конструкцию системы измерения высотно-скоростных параметров вертолета и снижает надежность ее работы, особенно при возможных резких аэродинамических возмущениях набегающего воздушного потока при маневрах или применении пушечного и реактивного вооружения.
Известен способ измерения высотно-скоростных параметров вертолета, принятый за прототип (Патент на изобретение №2427844, МПК G01P 5/14. Заявл. 09.03.2010. Опубл. 27.08.2011. Бюл. №24 - [4]), в котором устраняются недостатки, связанные с восприятием параметров набегающего воздушного потока и параметры результирующего воздушного потока вихревой колонны несущего винта с помощью свободно ориентируемого приемника воздушных давлений. В способе-прототипе параметры набегающего воздушного потока и параметры результирующего воздушного потока вихревой колонны несущего винта воспринимает неподвижный комбинированный аэрометрический приемник, который построен на основе неподвижного многоканального проточного аэрометрического приемника, который воспринимает параметры набегающего воздушного потока с помощью 6…8 равномерно распределенных в азимутальной плоскости трубок полного давления, которые установлены в проточном канале встречно набегающему потоку. На верхней поверхности неподвижного многоканального проточного аэрометрического приемника в вертикальной плоскости жестко закреплен симметричный, например, полусферический аэрометрический приемник с отверстиями на поверхности, которые воспринимают давления, определяющие величину (модуль) и углы направления вектора скорости результирующего воздушного потока вихревой колонны несущего винта в связанной системе координат. Давления, которые воспринимает неподвижный комбинированный аэрометрический приемник в измерительных каналах преобразуют в цифровые сигналы, которые подаю на вход вычислителя - микропроцессора, с помощью которого определяют высотно-скоростные параметры вертолета согласно предложенным уравнениям [4].
Восприятие параметров набегающего воздушного потока и результирующего воздушного потока вихревой колонны несущего винта с помощью неподвижного комбинированного аэрометрического приемника позволило существенно упростить конструкцию, снизить массу и габариты комбинированного аэрометрического приемника, повысить точность измерения высотно-скоростных параметров вертолета в области малых и околонулевых скоростей полета, снизить стоимость системы, реализующий данный способ.
Однако недостатками рассматриваемого способа измерения высотно-скоростных параметров вертолета является существенное снижение надежности, технологичности и серийно способности системы, реализующий данный способ, из-за необходимости защиты большого числа трубок полного давления, установленных в проточном канале неподвижного многоканального проточного аэрометрического приемника, от обледенения, попадания пыли и влаги в реальных условиях эксплуатации вертолета. Кроме того многоканальная измерительная схема преобразования давлений, воспринимаемых неподвижным многоканальным проточным аэрометрическим приемником, обусловливают жесткие требования к идентичности и стабильности характеристик измерительных каналов, что сдерживает применение системы измерения высотно-скоростных параметров вертолета, в которой реализуется способ-прототип.
Заявляемое изобретение направлено на достижение технического результата, который заключается в повышении надежности работы в условиях реальной эксплуатации, снижение требований к измерительным каналам, упрощении конструкции и расширении области применения системы измерения высотно-скоростных параметров, реализующий способ-прототип, на вертолетах различного класса и назначения.
Технический результат достигается тем, что в способе измерения высотно-скоростных параметров вертолета, заключающемся в восприятии параметров набегающего воздушного потока и результирующего воздушного потока вихревой колонны несущего винта с помощью неподвижного комбинированного приемника, их преобразования в цифровые сигналы, обработки и определении высотно-скоростных параметров в вычислительном устройстве (вычислителе) по заданным уравнениям, новым является то, что параметры набегающего воздушного потока воспринимает неподвижный панорамный ионно-меточный датчик, в котором искровой разрядник, подключенный к высоковольтному источнику, генерирует ионные метки, обладающие электростатическим зарядом, регистрируют скорость и угол траектории ее движения совместно с потоком с помощью платы с приемными электродами и измерительной схемы с цифровым выходом, который подключен ко входу вычислителя, при этом с помощью отверстия-приемника, расположенного на обтекаемой поверхности платы с приемными электродами ионно-меточного датчика, воспринимают статическое давление набегающего воздушного потока, преобразуют его с помощью цифрового датчика абсолютного давления в цифровой сигнал, который подают на вход вычислителя, который определяет высотно-скоростные параметры вертолета на всех режимах эксплуатации:
- на стоянке до запуска силовой установки согласно уравнениям вида
где W - скорость ветра; ψ - угол направления ветра в азимутальной плоскости относительно продольной оси вертолета; R0 - расстояние от точки генерации ионной метки до окружности с системой приемных электродов панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости; τв - интервал времени пролета ионной метки расстояния R0; i - номер рабочего сектора, в котором находится траектория движения ионной метки; α0 - угол, охватывающий рабочий сектор грубого канала измерения аэродинамического угла панорамного ионно-меточного датчика; αi - текущее значение аэродинамического угла в i-ом рабочем секторе канала точного измерения аэродинамического угла; Н0 - абсолютная барометрическая высота в месте стоянки; T0=288,15 K и Р0=101325 Па - абсолютная температура и абсолютное давление на высоте Н=0 стандартной атмосферы; R=287,05287 Дж/(кг К) - удельная газовая постоянная воздуха; ТН0 и РН0 - абсолютная температура и абсолютное давление на высоте Н0 в месте стоянки; τ=0,0065 K/м τ - температурный градиент, определяющий изменение температуры воздуха при изменении высоты;  и ρH0 - массовая плотность воздуха на высоте Н=0 и на высоте H0 в месте стоянки;
и ρH0 - массовая плотность воздуха на высоте Н=0 и на высоте H0 в месте стоянки;
- на стоянке при вращении несущего винта согласно уравнениям вида
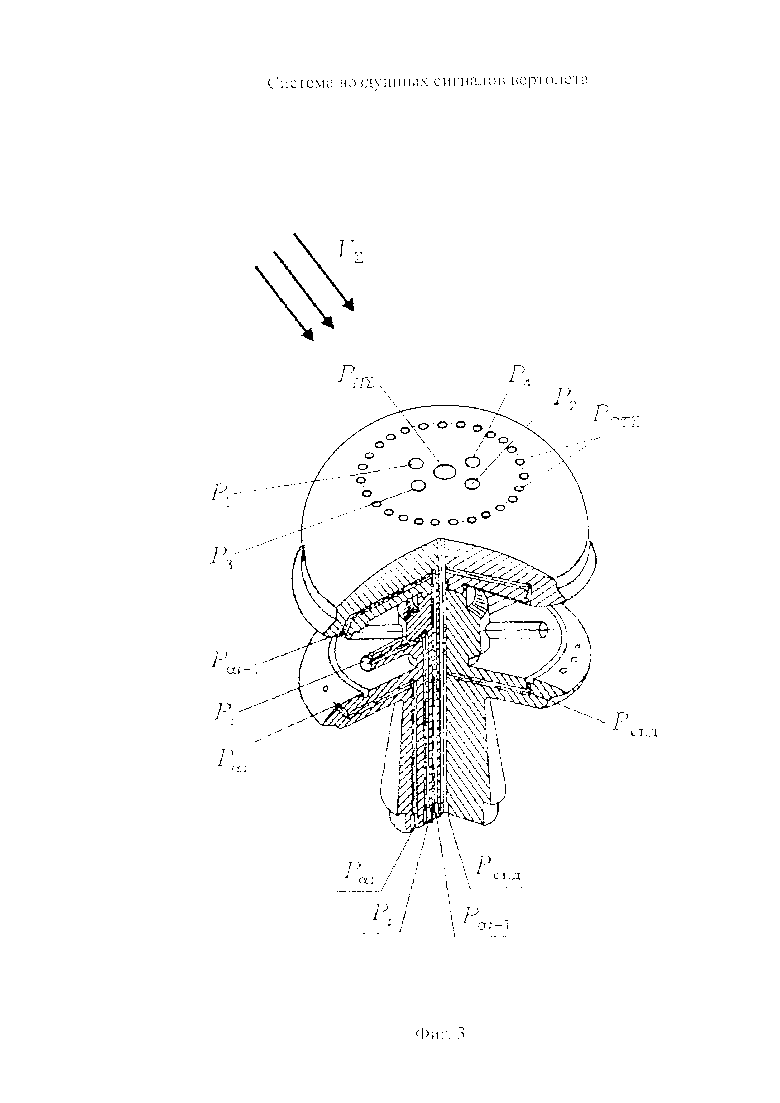
где Р1, Р2, Р3, Р4, РП∑, РСТ∑ - давления результирующего воздушного потока вихревой колонны несущего винта, воспринимаемые неподвижным полусферическим аэрометрическим приемником, установленным над системой приемных электродов неподвижного панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости; ϕ01 и ϕ02 - углы расположения отверстий-приемников давлений Р1, Р2, и Р3, Р4, относительно оси симметрии полусферического приемника; V∑ и Т∑ - величина (модуль) вектора скорости и температуры торможения результирующего воздушного потока вихревой колонны несущего винта; Kix, и Kiz - безразмерные коэффициенты, определяемые при летных испытаниях системы на вертолете данного типа в месте установки неподвижного комбинированного приемника;  - модуль вектора скорости Vi индуктивного потока несущего винта вертолета на режиме висения; Wx, Wz - продольная и боковая составляющие вектора скорости ветра;
- модуль вектора скорости Vi индуктивного потока несущего винта вертолета на режиме висения; Wx, Wz - продольная и боковая составляющие вектора скорости ветра;
- при рулении и маневрировании по земной поверхности (стартовые режимы) согласно уравнениям вида
где Vpx и Vpz - проекции вектора скорости  движения (руления) вертолета по земле на продольную и боковую оси связанной системы координат, определяемые с помощью спутниковой навигационной системы; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на данной высоте Н;
движения (руления) вертолета по земле на продольную и боковую оси связанной системы координат, определяемые с помощью спутниковой навигационной системы; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на данной высоте Н;
- при взлете и наборе высоты, снижении, висении и посадке (взлетно-посадочные режимы), на полетных режимах при скоростях Vв≤Vзвк, когда неподвижный комбинированный приемник находится в зоне вихревой колонны несущего винта, согласно уравнениям вида
где ωx, ωy - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного комбинированного приемника в связанной системе координат с центром масс вертолета; Vп и ψс - путевая скорость и угол сноса вертолета от доплеровского измерителя скорости и угла сноса; α и β - угол атаки и скольжения вертолета; Wг - проекция вектора ветра на горизонтальную плоскость хоу связанной системы координат; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на высоте полета;
- на полетных режимах при скоростях полета Vв>Vзвк, когда неподвижный комбинированный приемник выходит из зоны вихревой колонны несущего винта, согласно уравнениям вида
где k=1,4 - показатель адиабаты воздуха; g=9,80065 м/с2 - ускорение силы тяжести; Vп и ψ - путевая скорость и угол сноса, измеряемые доплеровским измерителем путевой скорости и угла сноса (ДИСС), устанавливаемым на вертолете.
Сущность изобретения поясняется на фиг. 1 и фиг. 2.
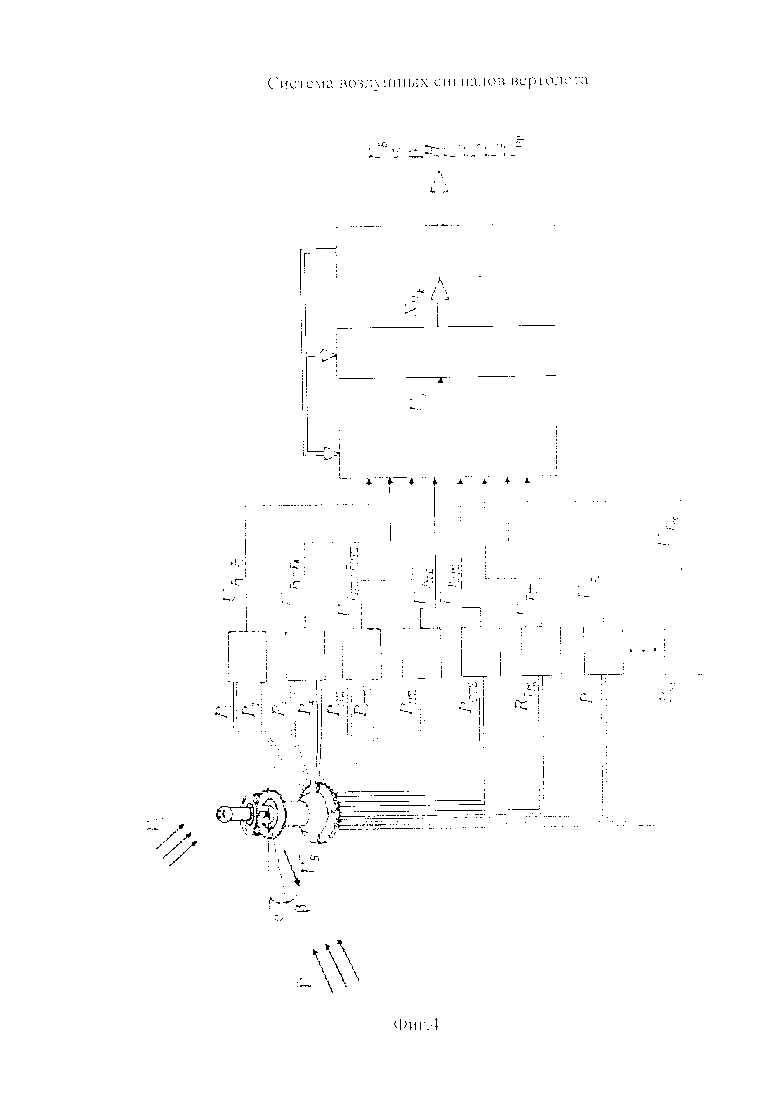
На фиг. 1 приведена функциональная схема системы измерения высотно-скоростных параметров вертолета с неподвижным комбинированным приемником, реализующей предлагаемый способ, в котором параметры набегающего воздушного потока воспринимает неподвижный панорамный ионно-меточный датчик.
На фиг. 2 приведена конструктивная схема неподвижного комбинированного приемника в виде неподвижного панорамного ионно-меточного датчика, на обтекаемой поверхности которого жестко закреплен полусферический аэрометрический приемник, который воспринимает параметры результирующего воздушного потока вихревой колонны несущего винта.
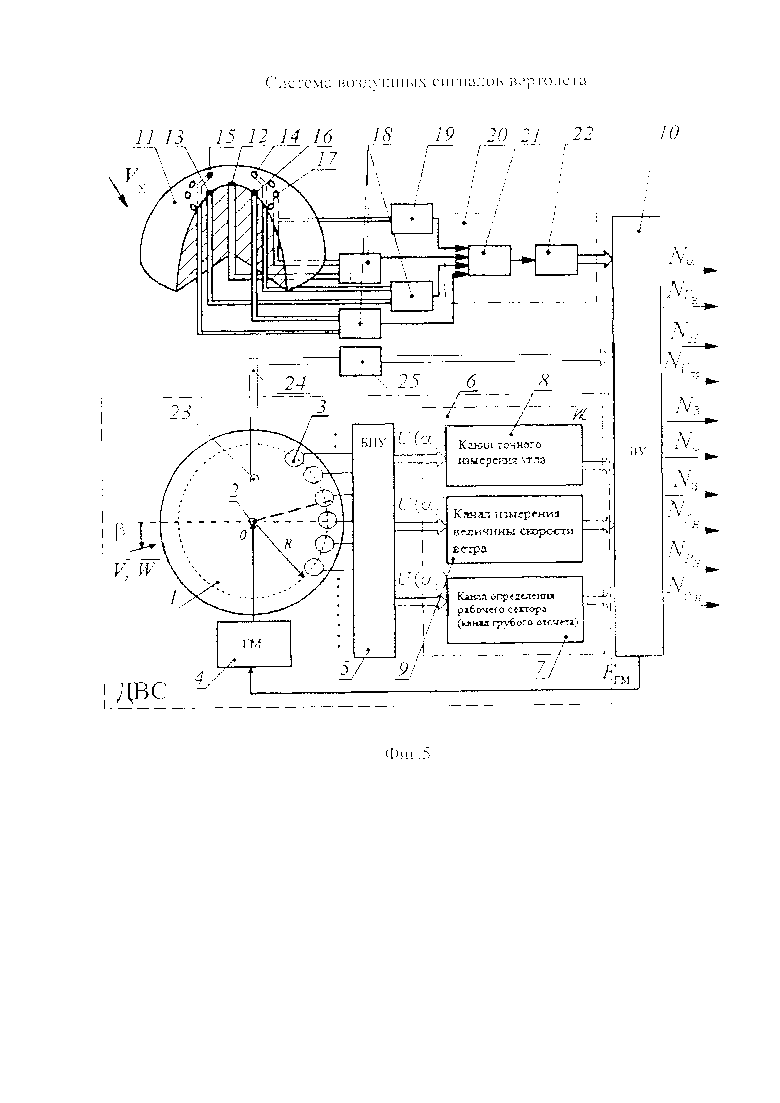
Здесь: 1 - плата с системой приемных электродов; 2 - искровой разрядник; 3 - приемный электрод; 4 - генератор меток; 5 - блок предварительных усилителей для регистрации скорости и угла траектории движения ионной метки; 6 - измерительная схема; 7 - канал грубого измерения угла траектории ионной метки в рабочем секторе; 8 - канал точного измерения угла траектории ионной метки в рабочем секторе; 9 - канал измерения величины вектора скорости набегающего воздушного потока; 10 - вычислительное устройство (вычислитель); 11 - полусферический аэрометрический приемник; 12 - отверстия для восприятия полного давления PП∑ результирующего воздушного потока вихревой колонны несущего винта; 13, 14 и 15, 16 - отверстия для восприятия давлений Р1,Р2 и Р3,Р4, определяющих углы ϕ1 и ϕ2 положения вектора скорости  результирующего воздушного потока вихревой колонны несущего винта; 17 - отверстия для восприятия статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта; 18 - пневмоэлектрические преобразователи перепада давлений; 19 - преобразователь абсолютного давления; 20 - аналого-цифровой преобразователь; 21 - мультиплексор; 22 - аналого-цифровой преобразователь; 23 - отверстие-приемник для восприятия статического давления РН набегающего воздушного потока; 24 - пневмопровод; 25 - датчик абсолютного давления с цифровым выходом.
результирующего воздушного потока вихревой колонны несущего винта; 17 - отверстия для восприятия статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта; 18 - пневмоэлектрические преобразователи перепада давлений; 19 - преобразователь абсолютного давления; 20 - аналого-цифровой преобразователь; 21 - мультиплексор; 22 - аналого-цифровой преобразователь; 23 - отверстие-приемник для восприятия статического давления РН набегающего воздушного потока; 24 - пневмопровод; 25 - датчик абсолютного давления с цифровым выходом.
На фиг. 1 приведена функциональная схема системы измерения высотно-скоростных параметров вертолета с неподвижным комбинированным приемником, реализующий предлагаемый способ, в котором неподвижный панорамный ионно-меточный датчик воспринимает скорость и угол направления набегающего воздушного потока, при этом полусферический аэрометрический приемник, который жестко закреплен на плате с системой приемных электродов ионно-меточного датчика, воспринимает параметры результирующего воздушного потока вихревой колонны несущего винта. При этом система измерения высотно-скоростных параметров вертолета, реализующая предлагаемый способ, выполнена по двухканальной схеме, включающей ионно-меточный и аэрометрический измерительные каналы.
В качестве ионно-меточного канала использован ионно-меточный датчик аэродинамического угла и воздушной скорости (ДВС) (Ганеев Ф.А., Солдаткин В.М. Ионно-меточный датчик аэродинамического угла и воздушной скорости с логометрическим информативными сигналами и интерполяционной схемой обработки // Известия вузов. Авиационная техника. 2003. №3. С. 46-50 - [5]; Патент РФ на изобретение №2445634, МКИ G01P 5/14. Меточный датчик аэродинамического угла и воздушной скорости / Ф.А. Ганеев, В.М. Солдаткин, И.Р. Уразбахтин, Н.Н. Макаров, В.И. Кожевников. Заявл. 05.05.2010. Заявка №2010118253/28. Опубл. 20.03.2012. Бюл. №8 - [6]). Ионно-меточный ДВС включает плату 1 с системой приемных электродов 3, в центре 0 которой установлен искровой разрядник 2, который подключен к генератору метки ГМ 4. При подаче на искровой разрядник 2 высоковольтного импульса от генератора меток (ГМ) искровой разрядник формирует ионную метку с явно выраженным электростатическим зарядом, которая движется совместно с набегающим воздушным потоком и приобретает его скорость и траекторию (направление). При приближении заряженной ионной метки к приемным электродам 3, расположенным на окружности радиусом R, она наводит на них электростатические заряды, величина которых зависит от расстояния R от точки генерации ионной метки до приемного электрода и углового положения ψ траектории движения метки.
За счет выбора конструктивных параметров системы приемных электродов с помощью четных приемных электродов 3 формируют положительные и отрицательные полуволны синусоидальных угловых характеристик информативных сигналов U(αi). На выходе блока предварительных усилителей (БПУ) 5 с помощью четных приемных электродов 3 формируют положительные и отрицательные полуволны синусоидальных угловых характеристик информативных сигналов U(αi), а с помощью нечетных приемных электродов 3 формируют положительные и отрицательные полуволны косинусоидальных угловых характеристик информативных сигналов U(αi).
Выходные сигналы блока предварительных усилителей (БПУ) 5 подают на входы измерительной схемы (ИС) 6, включающую канал 7 определения рабочего сектора (канал грубого отсчета) измеряемого угла α, канал 8 точного измерения угла в рабочем секторе и канал 9 измерения величины V вектора истинной воздушной скорости  набегающего воздушного потока. Выходные сигналы указанных каналов подают на входы вычислительного устройства (вычислителя) (ВУ) 10, который по результатам обработки входной информации выдает цифровые коды Nα и
набегающего воздушного потока. Выходные сигналы указанных каналов подают на входы вычислительного устройства (вычислителя) (ВУ) 10, который по результатам обработки входной информации выдает цифровые коды Nα и  по аэродинамическому углу α и истинной воздушной скорости Vв=V. Вычислительное устройство также формирует сигнал FГМ запуска генератора ионных меток и начала цикла измерения.
по аэродинамическому углу α и истинной воздушной скорости Vв=V. Вычислительное устройство также формирует сигнал FГМ запуска генератора ионных меток и начала цикла измерения.
Ионно-меточный датчик аэродинамического угла и воздушной скорости реализует кинематический метод измерения, при котором точность измерения угла направления α и скорости Vв не зависит от состояния окружающей среды (температуры, атмосферного давления, плотности, влажности и т.п.). Выполнение приемных электродов в виде расположенных по окружности металлических пластин позволяет сформировать логометрические информативные сигналы U(αi) с синусоидальной и косинусоидальной угловыми характеристиками и обеспечивает измерение угла направления во всем диапазоне его измерения, т.е. от 0 до 360° или ±180° без увеличения габаритных размеров системы приемных электродов. Выполнение измерительной схемы формирования выходных сигналов в виде канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, и канала точного измерения угла в каждом из рабочих секторов позволяет существенно повысить разрешающую способность по измеряемому углу направления α вектора истинной воздушной скорости  во всем диапазоне его изменения без увеличения числа приемных электродов и габаритных размеров системы приемных электродов.
во всем диапазоне его изменения без увеличения числа приемных электродов и габаритных размеров системы приемных электродов.
Для получения информации о высотно-скоростных параметрах вертолета в области малых и околонулевых скоростях полета, когда неподвижный комбинированный приемник находится в створе вихревой колонны несущего винта над платой 1 с системой приемных электродов 3 ионно-меточного датчика ДВС установлен неподвижно полусферический аэрометрический приемник 11, на поверхности которого расположены отверстие 12 для восприятия полного давления PП∑ результирующего воздушного потока вихревой колонны несущего винта, отверстия 13, 14 и 15, 16 для восприятия давлений Р1, Р2 и Р3, Р4, определяющих углы ϕ1 и ϕ2 положения вектора скорости  относительно оси симметрии полусферического приемника в плоскости, параллельной продольной оси вертолета, и в плоскости, перпендикулярной продольной оси вертолета, а также отверстия 17 для восприятия статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта.
относительно оси симметрии полусферического приемника в плоскости, параллельной продольной оси вертолета, и в плоскости, перпендикулярной продольной оси вертолета, а также отверстия 17 для восприятия статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта.
Воспринимаемые давления PП∑, Р1, Р2 и Р3, Р4, РСТ∑ с помощью пневмоэлектрических преобразователей перепада давлений 18 и преобразователя абсолютного давления 19 преобразуют в электрические сигналы, которые через канал 20 аналого-цифрового преобразования, включающего мультиплексор 21 и АЦП 22 подают в вычислительное устройство (вычислитель) 10, которое определяет и выдает цифровые сигналы по всем высотно-скоростным параметрам вертолета.
Для вычисления барометрической высоты Н, температуры ТН и плотности ρН окружающей среды по параметрам набегающего воздушного потока на плате 1 системы приемных электродов ионно-меточного датчика ДВС установлено отверстие-приемник 23, которое воспринимает статическое давление РН набегающего воздушного потока, которое через пневмопровод 24 подают на вход датчика абсолютного давления 25 с цифровым выходом, который также подключен ко входу вычислительного устройства (вычислителя) 10, который определяет и выдает сигналы по высотно-скоростным параметрам вертолета.
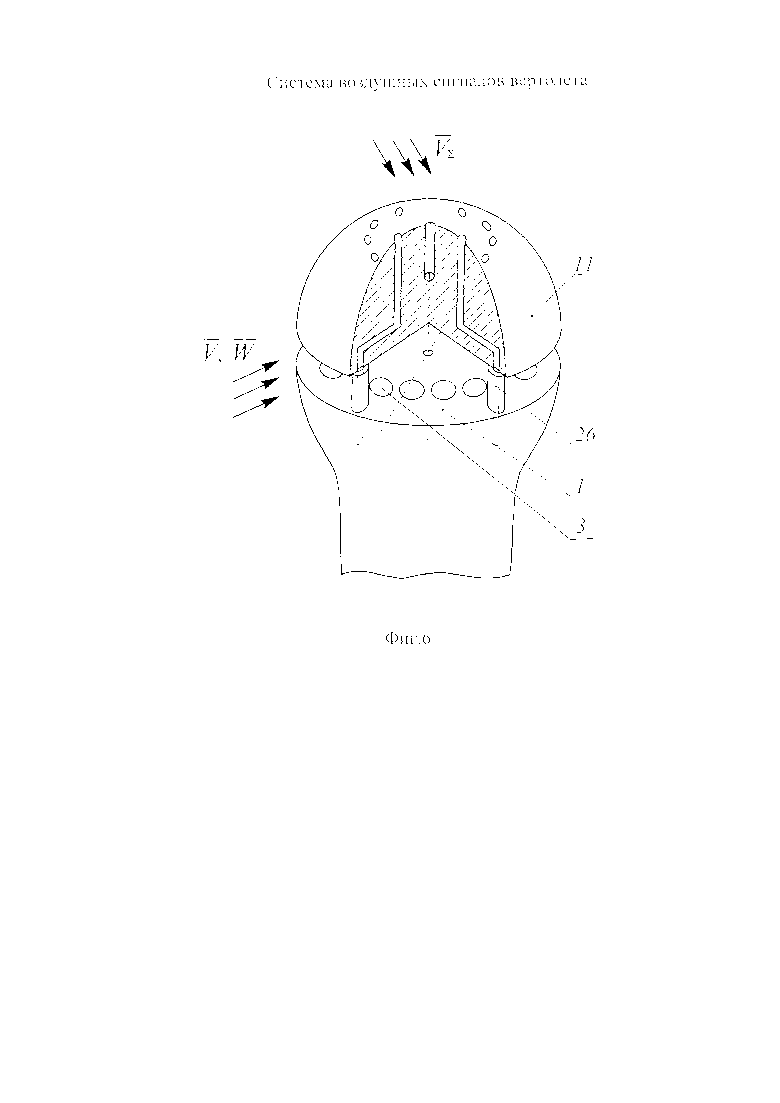
На фиг. 2 показана конструктивная схема неподвижного комбинированного приемника системы измерения высотно-скоростных параметров вертолета.
Перпендикулярно плате 1 с системой приемных электродов 3 панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости на стойках 26 установлен неподвижный полусферический аэрометрический приемник 11, на поверхности которого расположены отверстия для восприятия давлений, несущих информацию о векторе скорости  результирующего воздушного потока вихревой колонны несущего винта. Воспринимаемые давления по пневмоканалам через стойки 26 подают на входы пневмоэлектрических преобразователей 18, 19, расположенных внутри панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости ДВС, выходные сигналы которых через канал аналого-цифрового преобразования подают на вход вычислительного устройства (вычислитель) 10.
результирующего воздушного потока вихревой колонны несущего винта. Воспринимаемые давления по пневмоканалам через стойки 26 подают на входы пневмоэлектрических преобразователей 18, 19, расположенных внутри панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости ДВС, выходные сигналы которых через канал аналого-цифрового преобразования подают на вход вычислительного устройства (вычислитель) 10.
Система измерения высотно-скоростных параметров вертолета, которая реализует предлагаемый способ, работает следующим образом.
Неподвижный комбинированный приемник воспринимает параметры набегающего воздушного потока и параметры вектора скорости результирующего воздушного потока вихревой колонны несущего винта и выполнен в виде панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости ДВС и полусферического аэрометрического приемника 11, который закреплен на плате 1 с системой электродов 3 (фиг. 1) панорамного ионно-меточного датчика. Неподвижный комбинированный приемник устанавливается на фюзеляже в зоне действия вихревой колонны несущего винта. При этом плата 1 с системой приемных электродов 3 и отверстием-приемником 23 для восприятия статического давления набегающего воздушного потока находятся в горизонтальной плоскости связанной системы координат, а ось симметрии аэрометрического приемника 11 направлена вверх перпендикулярно горизонтальной плоскости. Плоскость, проходящая через отверстия 13 14 для забора давлений Р1, Р2 параллельна плоскости симметрии вертолета, а плоскость, проходящая через отверстия 15, 16 для забора давлений Р3, Р4 ортогональна плоскости симметрии вертолета.
На стоянке до запуска силовой установки входными сигналами ионно-меточного измерительного канала являются скорость Wг и угол направления ψ вектора горизонтального ветра  относительно продольной оси вертолета, которые необходимы экипажу вертолета для предотвращения опрокидывания вертолета на бок или на хвостовую балку при наличии ветровых возмущений.
относительно продольной оси вертолета, которые необходимы экипажу вертолета для предотвращения опрокидывания вертолета на бок или на хвостовую балку при наличии ветровых возмущений.
При попадании траектории ионной метки в i-ый грубый канал текущее значение измеряемого угла ψ направления горизонтального ветра Wг определяют по формуле

где α0 - угол, охватывающий рабочий сектор грубого канала отсчета (при imax=4, α0=90°); i - номер рабочего сектора  αр - значение измеряемого угла в пределах i-го рабочего сектора.
αр - значение измеряемого угла в пределах i-го рабочего сектора.
Сигналы U(αi), пропорциональные синусу Usinαi и косинусу Ucosαi, измеряемого угла ψ в i-ом рабочем секторе грубого канала и снимаемые с блока предварительных усилителей, обрабатывают в вычислительном устройстве (вычислителе), который определяет и формирует цифровой код, связанный со значение αр измеряемого угла в пределах рабочего сектора точного канала, в соответствии с соотношением

где αi - текущее значение измеряемого угла в пределах i-го рабочего сектора.
При работе канала измерения скорости горизонтального ветра Wг система приемных электродов и измерительная схема формирует интервал времени τв пролета ионной метки расстояния R от точки генерации 0 ионной метки до окружности с приемными электродами. В соответствии с интервалом времени τв вычислительное устройство определяет и вырабатывает цифровой код NW, который определяет величину скорости горизонтального ветра 
Для определения барометрической высоты Н0 в месте стоянки вертолета отверстие-приемник воспринимает статическое давление, которое преобразуют в цифровой сигнал, подают на вход вычислительного устройства (вычислителя), который определяет барометрическую высоту, используя известное соотношение [1]

где РН0 - статическое давление на высоте стоянки Н0; Т0 и Р0 - абсолютная температура и статическое давление на высоте Н=0 стандартной атмосферы (T0=288,15 K и Р0=101325 Па); τ=0,0065 K/м - температурный градиент, определяющий изменение температуры воздуха при изменении высоты; Р=287,05287 Дж/(кг К) - удельная газовая постоянная воздуха.
На стоянке при запуске силовой установки и вращении несущего винта, при рулении и маневрировании по земной поверхности, на взлетно-посадочных режимах в работу включается второй - аэрометрический измерительный канал, выполненный на основе неподвижного полусферического аэрометрического приемника, который жестко установлен над системой приемных электродов ионно-меточного датчика аэродинамического угла и воздушной скорости, воспринимает параметры результирующего воздушного потока вихревой колонны несущего винта.
По полному РП∑ и статическому РСТ∑ давлениям, которые воспринимает аэрометрический измерительный канал, и температуре TТ∑ торможения результирующего воздушного потока вихревой колонны несущего винта, который воспринимает приемник температуры торможения, установленный на фюзеляже в зоне действия вихревой колонны несущего винта, вычислительное устройство (вычислитель) определяет величину (модуль) вектора скорости  результирующего воздушного потока вихревой колонны несущего винта, используя соотношение (Солдаткин В.В. Система воздушных сигналов вертолета на основе неподвижного аэрометрического приемника и информации вихревой колонны несущего винта: Монография. Казань: Изд-во Казан. гос. техн. ун-та, 2012. 284 с. - [7])
результирующего воздушного потока вихревой колонны несущего винта, используя соотношение (Солдаткин В.В. Система воздушных сигналов вертолета на основе неподвижного аэрометрического приемника и информации вихревой колонны несущего винта: Монография. Казань: Изд-во Казан. гос. техн. ун-та, 2012. 284 с. - [7])
где параметры, входящие в формулу (11) имеют размерности в единицах системы СИ.
Тогда проекции вектора  скорости результирующего воздушного потока вихревой колонны несущего на оси связанной системы координат определяют как
скорости результирующего воздушного потока вихревой колонны несущего на оси связанной системы координат определяют как

где ϕ1 и ϕ2 - углы, определяющие положение вектора скорости  результирующего воздушного потока вихревой колонны несущего относительно осей полусферического аэрометрического приемника, которые определяют по давлениям Р1, Р2 и Р3, Р4.
результирующего воздушного потока вихревой колонны несущего относительно осей полусферического аэрометрического приемника, которые определяют по давлениям Р1, Р2 и Р3, Р4.
Используя соотношения для определения давления на поверхности полусферического аэрометрического приемника, приведенные в работе [2], углы ϕ1 и ϕ2, определяющие положение вектора скорости  результирующего набегающего воздушного потока вихревой колоны несущего винта, определяют в соответствии с соотношениями
результирующего набегающего воздушного потока вихревой колоны несущего винта, определяют в соответствии с соотношениями
где ϕ10 и ϕ20 - углы расположения отверстий для забора давлений Р1, Р2 и Р3, Р4.
Поскольку неподвижный панорамный ионно-меточный датчик аэродинамического угла и истинной воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником расположен на фюзеляже на определенном радиус-векторе  от центра масс вертолета, то при вращении вертолета относительно центра масс имеет место кинематическое искажение вектора скорости
от центра масс вертолета, то при вращении вертолета относительно центра масс имеет место кинематическое искажение вектора скорости  воздушного потока, набегающего на аэрометрический приемник, которое определяют в соответствии с векторным уравнением вида
воздушного потока, набегающего на аэрометрический приемник, которое определяют в соответствии с векторным уравнением вида

где  - кинематически искаженный вектор скорости набегающего воздушного потока в месте установки неподвижного комбинированного аэрометрического приемника;
- кинематически искаженный вектор скорости набегающего воздушного потока в месте установки неподвижного комбинированного аэрометрического приемника;  (ωx, ωy, ωz) - вектор угловой скорости вращения вертолета относительно центра масс; ωx, ωy, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного панорамного меточного датчика аэродинамического угла и воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником в связанной системе координат, центр которой находится в центре масс вертолета.
(ωx, ωy, ωz) - вектор угловой скорости вращения вертолета относительно центра масс; ωx, ωy, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного панорамного меточного датчика аэродинамического угла и воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником в связанной системе координат, центр которой находится в центре масс вертолета.
Тогда проекции вектора скорости  на оси связанной системы координат определяют в соответствии с системой уравнений вида
на оси связанной системы координат определяют в соответствии с системой уравнений вида

где Vx, Vy, Vz - проекции вектора истинной воздушной скорости  на оси связанной системы координат.
на оси связанной системы координат.
Продольная и боковая составляющие Vx, Vz и величина (модуль) Vв вектора истинной воздушной скорости  углы атаки α и скольжения β вертолета, статическое давление PH и барометрическая высота Н вычислительное устройство определяет в соответствии с соотношениями [7]:
углы атаки α и скольжения β вертолета, статическое давление PH и барометрическая высота Н вычислительное устройство определяет в соответствии с соотношениями [7]:

где Р0=101325 Па и Т0=288,15 К - абсолютное давление и абсолютная температура воздуха на высоте Н=0 стандартной атмосферы; R - удельная газовая постоянная воздуха (R=287,05287 Дж/кг⋅К); τ - температурный градиент (τ=0,0065 К/м); Kр - безразмерный коэффициент, определяющий связь РСТ∑ и PH, который определяется при летных испытаниях для конкретного типа вертолета и места установки на фюзеляже неподвижного панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости с установленным на нем осесимметричным полусферическим аэрометрическим приемником; Kiy - безразмерный коэффициент, определяемый аналогично Kix и Kiz.
Используя информацию о величине Vп и угле сноса ψс вектора путевой скорости  от установленного на вертолете доплеровского измерителя скорости и угла сноса (ДИСС) и о составляющих вектора истинной воздушной скорости
от установленного на вертолете доплеровского измерителя скорости и угла сноса (ДИСС) и о составляющих вектора истинной воздушной скорости  от аэрометрического канала, продольная Wx, боковая Wz составляющие, величина (модуль) Wг и направление ψ горизонтального вектора ветра
от аэрометрического канала, продольная Wx, боковая Wz составляющие, величина (модуль) Wг и направление ψ горизонтального вектора ветра  на взлетно-посадочных режимах вертолета вычислительное устройство определяет в соответствии с соотношениями (Никитин А.В., Солдаткин В.В., Солдаткин В.М. Система измерения параметров вектора ветра на стартовых и взлетно-посадочных режимах вертолета // Мехатроника, автоматизация, управление. 2013. №6. С. 64-70 [8])
на взлетно-посадочных режимах вертолета вычислительное устройство определяет в соответствии с соотношениями (Никитин А.В., Солдаткин В.В., Солдаткин В.М. Система измерения параметров вектора ветра на стартовых и взлетно-посадочных режимах вертолета // Мехатроника, автоматизация, управление. 2013. №6. С. 64-70 [8])

Таким образом, используя информацию, которую воспринимает неподвижный комбинированный приемник, выполненный в виде неподвижного панорамного ионно-меточного датчика аэродинамического угла и воздушной скорости с установленным над его системой приемных электродов полусферическим аэрометрическим приемником, вычислительное устройство, выполненное в виде вычислителя, реализует алгоритмы (7)-(9), (12), (13), (16), (17) и определяет параметры вектора скорости ветра и другие высотно-скоростные параметры вертолета, на стоянке при запуске силовой установки и вращении несущего винта, при рулении и маневрировании по земной поверхности, при взлете, снижении, висении и посадке вертолета.
При скоростях полета, когда неподвижный комбинированный приемник выходит из зоны вихревой колонны несущего винта для определения высотно-скоростных параметров полета используется информации аэрометрического и ионно-меточного измерительных каналов.
По информации ионно-меточного измерительного канала по соотношениям, аналогичным (7)-(9), вычислительное устройство определяет истинную воздушную скорость Vв и угол скольжения β в соответствии с соотношениями

где τV - время пролета ионной метки от разрядника до окружности с приемными электродами при данной истинной воздушной скорости Vв.
Для определения барометрической высоты Н на наружной поверхности платы 1 с приемными электродами ионно-меточного датчика аэрометрического угла и истинной воздушной скорости установлено отверстие-приемник, которое воспринимает статическое давление РН набегающего воздушного потока. Барометрическую высоту Н вычислительное устройство определяет в соответствии с известным соотношением
При необходимости, вертикальную воздушную скорость Vy вычислительное устройство определяет путем вычисления производной по времени от барометрической высоты

где ti и ti-1 - текущий и предшествующие моменты времени, в которых произведены вычисления барометрической высоты.
Возможно вычисление вертикальной воздушной скорости по большему числу значений барометрической высоты, полученных через фиксированный интервал времени τ, например, в соответствии с соотношением

Угол атаки вертолета вычислительное устройство определяет, используя соотношение

Таким образом, предлагаемое восприятие параметров набегающего воздушного потока и параметров результирующего воздушного потока вихревой колонны несущего винта с помощью неподвижного панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости и отверстия, которое воспринимает статическое давление набегающего воздушного потока на обтекаемой поверхности системы приемных электродов, и с помощью неподвижного полусферического приемника, который воспринимает величину и углы положения вектора скорости результирующего воздушного потока вихревой колонны несущего винта, позволило измерить все высотно-скоростные параметры на всех этапах и режимах эксплуатации вертолета, повысить надежность работы системы, реализующий предлагаемый способ, в реальных условиях эксплуатации за счет отсутствия трубок полного давления, подверженных обледенению, попаданию пыли и влаги, снизить требования к идентичности и стабильности характеристик элементов двухканальной измерительной схемы, а, следовательно, повысить технологичность и серийноспособность системы измерения высотно-скоростных параметров на вертолетах различного класса и назначения. Применение системы на различных классах вертолетов позволяет повысить точность измерения высотно-скоростных параметров и эффективность решения полетных задач, обеспечить безопасность эксплуатации вертолетов на всех этапах и режимах полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2580208C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
Изобретение относится к способу измерения высотно-скоростных параметров вертолета. Для измерения высотно-скоростных параметров измеряют параметры набегающего воздушного потока и результирующего воздушного потока вихревой колонны несущего винта с помощью неподвижного комбинированного приемника, преобразуют их в цифровые сигналы, осуществляют их обработку и определяют высотно-скоростные параметры в вычислительном устройстве (вычислителе) по заданным уравнениям, при этом параметры набегающего воздушного потока воспринимает неподвижный панорамный ионно-меточный датчик, в котором искровой разрядник, подключенный к высоковольтному источнику, генерирует ионные метки, обладающие электростатическим зарядом, регистрируют скорость и угол траектории ее движения совместно с потоком с помощью платы с приемными электродами и измерительной схемы с цифровым выходом, который подключен ко входу вычислителя, при этом с помощью отверстия-приемника, расположенного на обтекаемой поверхности платы с приемными электродами ионно-меточного датчика, воспринимают статическое давление набегающего воздушного потока, преобразуют его с помощью цифрового датчика абсолютного давления в цифровой сигнал, который подают на вход вычислителя, который определяет высотно-скоростные параметры вертолета на всех режимах эксплуатации определенным образом. Обеспечивается повышение точности измерения высотно-скоростных параметров. 6 ил.
Способ измерения высотно-скоростных параметров вертолета, заключающийся в восприятии параметров набегающего воздушного потока и результирующего воздушного потока вихревой колонны несущего винта с помощью неподвижного комбинированного приемника, их преобразования в цифровые сигналы, обработки и определения высотно-скоростных параметров в вычислительном устройстве (вычислителе) по заданным уравнениям, отличающийся тем, что параметры набегающего воздушного потока воспринимает неподвижный панорамный ионно-меточный датчик, в котором искровой разрядник, подключенный к высоковольтному источнику, генерирует ионные метки, обладающие электростатическим зарядом, регистрируют скорость и угол траектории ее движения совместно с потоком с помощью платы с приемными электродами и измерительной схемы с цифровым выходом, который подключен ко входу вычислителя, при этом с помощью отверстия-приемника, расположенного на обтекаемой поверхности платы с приемными электродами ионно-меточного датчика, воспринимают статическое давление набегающего воздушного потока, преобразуют его с помощью цифрового датчика абсолютного давления в цифровой сигнал, который подают на вход вычислителя, который определяет высотно-скоростные параметры вертолета на всех режимах эксплуатации:
- на стоянке до запуска силовой установки согласно уравнениям вида
где W - скорость ветра; ψ - угол направления ветра в азимутальной плоскости относительно продольной оси вертолета; R0 - расстояние от точки генерации ионной метки до окружности с системой приемных электродов панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости; τв - интервал времени пролета ионной метки расстояния R0; i - номер рабочего сектора, в котором находится траектория движения ионной метки; α0 - угол, охватывающий рабочий сектор грубого канала измерения аэродинамического угла панорамного ионно-меточного датчика; αi - текущее значение аэродинамического угла в i-м рабочем секторе канала точного измерения аэродинамического угла; Н0 - абсолютная барометрическая высота в месте стоянки; T0=288,15 K и Р0=101325 Па - абсолютная температура и абсолютное давление на высоте Н=0 стандартной атмосферы; R=287,05287 Дж/(кг К) - удельная газовая постоянная воздуха; TH0 и РH0 - абсолютная температура и абсолютное давление на высоте Н0 в месте стоянки; τ=0,0065 K/м τ - температурный градиент, определяющий изменение температуры воздуха при изменении высоты;  и
и  - массовая плотность воздуха на высоте Н=0 и на высоте Н0 в месте стоянки;
- массовая плотность воздуха на высоте Н=0 и на высоте Н0 в месте стоянки;
- на стоянке при вращении несущего винта согласно уравнениям вида
где P1, P2, P3, P4, PП∑, PСТ∑ - давления результирующего воздушного потока вихревой колонны несущего винта, воспринимаемые неподвижным полусферическим аэрометрическим приемником, установленным над системой приемных электродов неподвижного панорамного ионно-меточного датчика аэродинамического угла и истинной воздушной скорости; ϕ01 и ϕ02 - углы расположения отверстий-приемников давлений Р1, Р2, и Р3, Р4, относительно оси симметрии полусферического приемника; V∑ и Т∑ - величина (модуль) вектора скорости и температуры торможения результирующего воздушного потока вихревой колонны несущего винта; Kix, и Kiz - безразмерные коэффициенты, определяемые при летных испытаниях системы на вертолете данного типа в месте установки неподвижного комбинированного приемника;  - модуль вектора скорости Vi индуктивного потока несущего винта вертолета на режиме висения; Wx, Wz - продольная и боковая составляющие вектора скорости ветра;
- модуль вектора скорости Vi индуктивного потока несущего винта вертолета на режиме висения; Wx, Wz - продольная и боковая составляющие вектора скорости ветра;
- при рулении и маневрировании по земной поверхности (стартовые режимы) согласно уравнениям вида
где Vpx и Vpz - проекции вектора скорости  движения (руления) вертолета по земле на продольную и боковую оси связанной системы координат, определяемые с помощью спутниковой навигационной системы; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на данной высоте Н;
движения (руления) вертолета по земле на продольную и боковую оси связанной системы координат, определяемые с помощью спутниковой навигационной системы; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на данной высоте Н;
- при взлете и наборе высоты, снижении, висении и посадке (взлетно-посадочные режимы), на полетных режимах при скоростях Vв≤Vзвк, когда неподвижный комбинированный приемник находится в зоне вихревой колонны несущего винта, согласно уравнениям вида
где ωx, ωy - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного комбинированного приемника в связанной системе координат с центром масс вертолета; Vп и ψс - путевая скорость и угол сноса вертолета от доплеровского измерителя скорости и угла сноса; α и β - угол атаки и скольжения вертолета; Wг - проекция вектора ветра на горизонтальную плоскость xoy связанной системы координат; TH, PH, ρH. - абсолютная температура, статическое давление и плотность окружающей среды на высоте полета;
- на полетных режимах при скоростях полета Vв>Vзвк, когда неподвижный комбинированный приемник выходит из зоны вихревой колонны несущего винта, согласно уравнениям вида
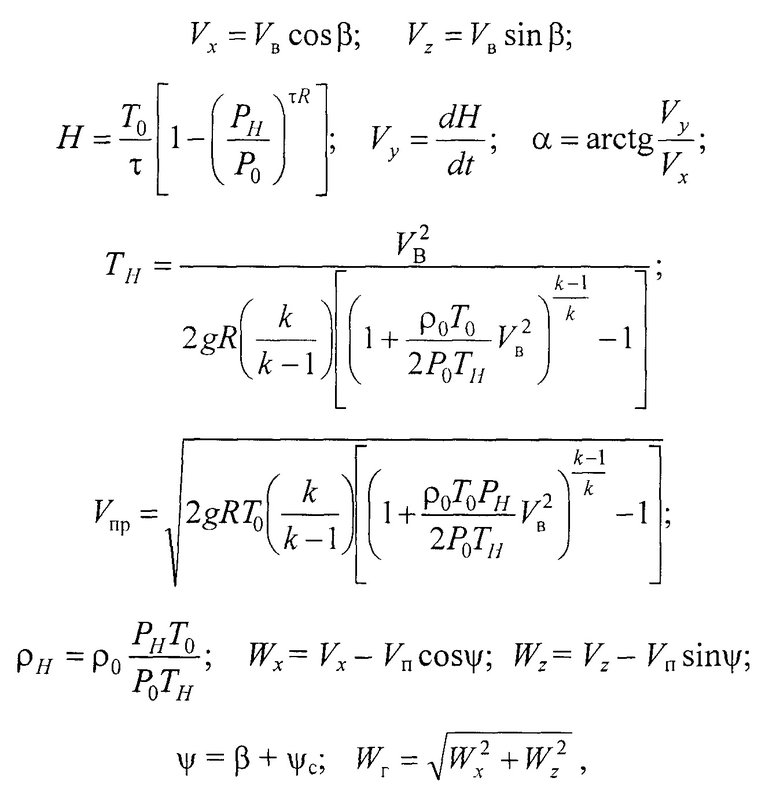
где k=1,4 - показатель адиабаты воздуха; g=9,80065 м/с2 - ускорение силы тяжести; Vп и ψ - путевая скорость и угол сноса, измеряемые доплеровским измерителем путевой скорости и угла сноса (ДИСС), устанавливаемым на вертолете.
| 0 |
|
SU155825A1 | |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| EP 3321691 A1, 16.05.2018 | |||
| US 7036365 B2, 02.05.2006. | |||

