Изобретение относится к устройствам для измерения высотно-скоростных параметров вертолета.
Известны устройства для измерения высотно-скоростных параметров самолета, реализующие аэрометрический способ измерения. В таких устройствах приемник воздушного давления, установленный в набегающем на самолет воздушном потоке, воспринимает статическое и полное давление набегающего воздушного потока, по которым определяют барометрическую высоту, приборную и воздушную скорость и, используя информацию о температуре наружного воздуха, истинную воздушную скорость (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970, 392 с. - [1]). С помощью установленных в набегающем потоке аэрометрических приемников также воспринимают давления, по которым определяют угловое положение вектора истинной воздушной скорости в связанной скоростной системе координат - углы атаки и скольжения (Петунии А.Н. Методы и техника измерения параметров газового потока. М.: Машиностроение, 1972, 392 с. - [2]). Однако применение таких устройств на вертолете позволяет достаточно точно измерить барометрическую высоту, приборную скорость и истинную воздушную скорость только при скоростях полета более 70…90 км/ч, когда приемники потока выходят за пределы вихревой колонны, создаваемой несущим винтом вертолета, и когда обеспечивается помехоустойчивое восприятие и преобразование воспринимаемых воздушных давлений. Диапазон измерения углов атаки и скольжения указанных устройств также ограничен значениями ±30°, в то время как для вертолета рабочими являются полеты вперед-назад, вправо-влево, в ином другом направлении в плоскости рыскания и тангажа, а также полеты в области малых и околонулевых скоростей и даже на режиме висения.
Для получения информации о высотно-скоростных параметрах в области малых скоростей полета вертолета в известных системах воздушных сигналов (СВС) применяют несколько проточных приемников давления, размещаемых в носовой части фюзеляжа симметрично относительно продольной оси вертолета (Козицин В.К., Макаров Н.Н., Порунов А.А., Солдаткин В.М. Анализ принципов построения систем воздушных сигналов вертолета // Авиакосмическое приборостроение, 2003, №10, с.2-13 - [3]). Экспериментальные исследования такой СВС, разработанной МПКБ "Восход", показали, что при скоростях полета менее 30 км/ч погрешность измерения угла скольжения достигает около ±2°, а при скоростях более 70…90 км/ч, когда носовая часть фюзеляжа вертолета, где установлены проточные приемники, выходит из зоны вихревой колонны, погрешность уменьшается до значений ±0,4°, приемлемых для решения задач управления и пилотирования. Однако одним из основных недостатков такой СВС и способа, реализованного в ней, является ограниченный диапазон измерения по углу скольжения значением β=±20° - [1].
Известна система воздушных сигналов, которая позволяет получить информацию о параметрах вектора воздушной скорости вертолета и при скоростях полета менее 70…90 км/ч. Известные СВС вертолета типа Lassie, ХМ-143 и СВС-В1 - [3] - содержат свободно-ориентируемый приемник воздушных давлений, который при малых скоростях полета находится в створе вихревой колонны и ориентируется с помощью пространственного флюгера по направлению вектора  результирующего воздушного потока, набегающего на свободно-ориентированный приемник. Вектор
результирующего воздушного потока, набегающего на свободно-ориентированный приемник. Вектор  является суммой вектора
является суммой вектора  воздушного потока, обусловленного поступательным движением вертолета, и вектора
воздушного потока, обусловленного поступательным движением вертолета, и вектора  индуктивной скорости воздушного потока, создаваемого несущим винтом вертолета. В этом случае система уравнений, по которым определяют составляющие Vx, Vy, Vz вектора истинной воздушной скорости
индуктивной скорости воздушного потока, создаваемого несущим винтом вертолета. В этом случае система уравнений, по которым определяют составляющие Vx, Vy, Vz вектора истинной воздушной скорости  , углы атаки α и скольжения β вертолета имеют вид (Козицин В.К. Алгоритмическое обеспечение систем воздушных сигналов вертолета на основе свободно-ориентированного приемника давлений // Изв. вузов. Авиационная техника. 2004. №4. С.52-57 - [4]):
, углы атаки α и скольжения β вертолета имеют вид (Козицин В.К. Алгоритмическое обеспечение систем воздушных сигналов вертолета на основе свободно-ориентированного приемника давлений // Изв. вузов. Авиационная техника. 2004. №4. С.52-57 - [4]):
где ix, iz - углы наклона плоскости диска несущего винта; αBK и βBK - углы скоса воздушного потока вихревой колонны относительно осей связанной (скоростной) системы координат.
Однако система на основе свободно-ориентированного приемника имеет значительные погрешности определения параметров Vx, Vy, Vz, α и β вектора истинной воздушной скорости вертолета в области малых и особенно околонулевых скоростей из-за погрешностей регистрации углов αBK, βBK положения вихревой колонны, обусловленных малостью флюгерного момента, создаваемого пространственным флюгером, наличием трения в кардановом подвесе и нагружения подвижной системы свободно-ориентированного приемника. Это также ограничивает значение минимальной рабочей скорости полета, при которой обеспечивается устойчивое измерение параметров вектора истинной воздушной скорости и других высотно-скоростных параметров вертолета. Из-за необходимости передачи воспринимаемых воздушных давлений с вращающегося ориентируемого приемника и преобразования углов ориентации подвижного приемника в электрические сигналы с помощью пневмоколлектора и сельсинных преобразователей усложняется конструкция системы воздушных сигналов вертолета и снижается надежность ее работы, особенно при возможных резких аэродинамических возмущениях набегающего воздушного потока при стрельбе стрелкового и реактивного вооружения.
За прототип взята система измерения воздушных сигналов вертолета (патент №2307357 от 07.12.2005 г., МПК G01P 5/16, опубл. 27.09.2007. Бюл. №27 - [5]), в которой для регистрации углов αВК и βВК вихревой колонны несущего винта вертолета в диапазоне малых скоростей полета используются два неподвижных ортогонально расположенных многоканальных проточных аэрометрических приемника, трубки полного давления и полости дросселирования статического давления которых соединены с пневмоэлектрическими преобразователями, выходы которых через мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, в котором вычисляются параметры вектора истинной воздушной скорости вертолета в области малых скоростей по уравнениям вида




где a
β и a
α - коэффициенты связи боковой Vz и продольной Vx составляющих вектора  воздушной скорости вертолета с углами скоса βBK и αBK вихревой колонны несущего винта вертолета в плоскости рыскания и ортогональной с ней плоскости; a
H и a
P - коэффициент связи барометрической высоты Н и вертикальной скорости Vy с величиной и скоростью изменения дросселированного статического давления Рст.д.
воздушной скорости вертолета с углами скоса βBK и αBK вихревой колонны несущего винта вертолета в плоскости рыскания и ортогональной с ней плоскости; a
H и a
P - коэффициент связи барометрической высоты Н и вертикальной скорости Vy с величиной и скоростью изменения дросселированного статического давления Рст.д.
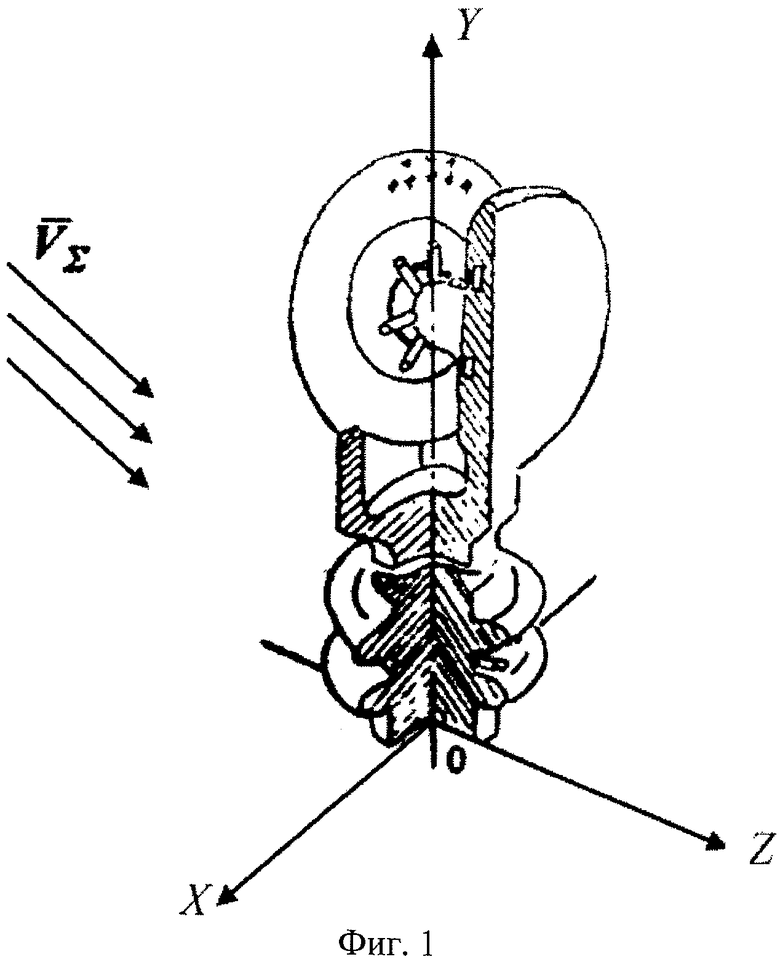
На фиг.1 приведена компоновка аэрометрического блока из двух неподвижных ортогонально расположенных многоканальных аэрометрических приемников системы воздушных сигналов вертолета, взятой за прототип, который устанавливается на фюзеляже вертолета в зоне вихревой колонны несущего винта.
На фиг.2 приведена структурно-функциональная схема системы-прототипа.
При работе системы первый неподвижный проточный многоканальный аэрометрический приемник (фиг.1) в плоскости рыскания выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю, в которой формирует давления, пропорциональные дросселированному статическому давлению Рст.д и давления Pi, характеризующие угол ψβ скоса плоскопараллельной воздушной струи в плоскости рыскания. С помощью пневмоэлектрических, например термоанемометрических, преобразователей и электроизмерительных схем воспринимаемые давления Рст.д и Pi преобразуют в электрические сигналы Ui, которые через последовательно соединенные мультиплексор и аналого-цифровой преобразователь вводятся в микропроцессор. Второй ортогонально расположенный многоканальный аэрометрический приемник выделяет в набегающем на него воздушном потоке вихревой колонны плоскопараллельную воздушную струю в плоскости, ортогональной плоскости рыскания, в которой формируют и преобразуют в электрические сигналы давления, соответствующие дросселированному статическому давлению Рст.д, и давления Pi, характеризующие угол ψα скоса ортогональной плоскопараллельной воздушной струи, которые через мультиплексор и аналого-цифровой преобразователь (фиг.2) вводят в микропроцессор. Микропроцессор обрабатывает введенные электрические сигналы по разработанным алгоритмам, определяет углы положения (скоса) вихревой колонны, по которым вычисляет величину и составляющие вектора воздушной скорости, и другие высотно-скоростные параметры вертолета.
При установке аэрометрического блока, выполненного в виде двух ортогонально расположенных проточных многоканальных аэрометрических приемников, в носовой части фюзеляжа вертолета имеют место два характерных режима обтекания набегающим воздушным потоком.
При скоростях полета более 70…90 км/ч, когда аэрометрический блок находится вне вихревой колонны несущего винта, составляющие вектора воздушной скорости  на оси связанной скоростной системы координат определяются в соответствии с системой уравнений вида
на оси связанной скоростной системы координат определяются в соответствии с системой уравнений вида
где β=ψβ и α=ψα - углы скольжения и атаки вертолета, равные углам скоса плоскопараллельной воздушной струи в плоскости рыскания ψβ и воздушной струи в ортогональной с ней плоскости ψα.
Модуль (величина) вектора истинной воздушной скорости вертолета определяется по соотношению

Барометрическая высота Н определяется по информации о величине дросселированного статического давления Рст.д, получаемой от многоканальных аэрометрических приемников, по соотношению
где R - газовая постоянная воздуха; Т=Т0+τН - температура наружного воздуха; τ - высотный температурный градиент; Р0 и Т0 - статическое давление и температура на уровне земли (Р0=101325 Па, Т0=288,15 K).
В области малых скоростей полета, когда аэрометрический блок с проточными многоканальными аэрометрическими приемниками находится в створе вихревой колонны несущего винта вертолета, за меру величин составляющих вектора истинной воздушной скорости вертолета используется угловое положение воздушного потока вихревой колонны несущего винта вертолета, определяемое углами скоса β=ψβ и α=ψα, которые регистрируются ортогонально расположенными проточными многоканальными приемниками и определяются в соответствии с уравнениями вида (2).
Как показали исследования (Kaletka J. Evaluation of the Helicopter Low Airspeed System Lassie // Jornal of American Helicopter Society, 1983, №4, pp.35-43 - [5]), угловое положение вихревой колонны вертолета при полете на малых скоростях можно представить в виде
где 
 и aα, a
β - функции и коэффициенты, определяемые по результатам летных испытаний данного типа вертолета.
и aα, a
β - функции и коэффициенты, определяемые по результатам летных испытаний данного типа вертолета.
При этом для каждого значения αBK, находящегося в зоне вихревой колонны, можно определить два значения βBKmax и βBKmin, определяющих границы углового положения вихревой колонны в ортогональной плоскости. Следовательно, за критерий нахождения аэрометрического блока в зоне вихревой колонны для каждого значения αBK можно использовать условие

При соблюдении этого условия, т.е. при полете вертолета на малых скоростях, алгоритмы определения высотно-скоростных параметров вертолета имеют вид


где a P - коэффициент связи вертикальной скорости со скоростью изменения статического давления.
В случае невыполнения условия (7) вихревая колонна не охватывает планер вертолета и полет осуществляется в режиме, когда аэрометрический блок с многоканальными аэрометрическими приемниками вышел за пределы вихревой колонны и высотно-скоростные параметры вертолета определяются в соответствии с уравнениями (3), (4), (5) [3, 4].
Выделение с помощью неподвижных ортогонально расположенных проточных многоканальных аэрометрических приемников двух плоскопараллельных воздушных струй в плоскости рыскания и в ортогональной ей плоскости, формирование в них давлений, характеризующих дросселированное статическое давление в струях, и давлений, характеризующих их углы скоса, преобразование давлений в электрические сигналы с помощью пневмоэлектрических, например термоанемометрических, преобразователей и последовательное определение углового положения (углов скоса) вихревой колонны несущего винта и далее параметров вектора истинной воздушной скорости и других воздушных сигналов вертолета позволяет повысить точность измерения высотно-скоростных параметров, расширить рабочие диапазоны по углу атаки и по скорости в области малых и околонулевых скоростей полета.
Однако недостатками рассматриваемой системы воздушных сигналов вертолета является существенное усложнение конструкции, увеличение массы и габаритов аэрометрического блока, усложнение и повышение стоимости системы в целом.
Кроме того, при нахождении аэрометрического блока в створе вихревой колонны несущего винта вертолета верхний многоканальный проточный аэрометрический приемник вносит значительные аэродинамические искажения в набегающий результирующий воздушный поток вихревой колонны, вызывающие появление погрешностей измерения углового положения вектора результирующей скорости воздушного потока вихревой колонны, а следовательно, и погрешности определения высотно-скоростных параметров вертолета в области малых и особенно при околонулевых скоростях полета.
Заявляемое изобретение направлено на достижение технического результата, который заключается в упрощении конструкции, снижении массы и габаритов аэрометрического блока, снижении стоимости и повышении точности системы воздушных сигналов вертолета за счет использования одного неподвижного комбинированного аэрометрического приемника, выполненного хорошо обтекаемым и осесимметричным относительно направления вектора скорости результирующего набегающего воздушного потока вихревой колонны несущего винта вертолета.
Использование предложенной системы воздушных сигналов вертолета позволяет повысить безопасность полета и повысить эффективность решения задач пилотирования и боевого применения, например точность стрельбы и бомбометания, за счет повышения точности и надежности работы системы, в том числе в условиях возможных резких возмущений аэродинамического поля вертолета, и обеспечения высокой точности измерения высотно-скоростных параметров вертолета в области малых и околонулевых скоростей полета.
Технический результат достигается тем, что в системе воздушных сигналов вертолета, содержащей неподвижный многоканальный аэрометрический приемник в виде разнесенных по высоте экранирующих дисков, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки полного давления, на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемником дросселированного статического давления, при этом трубки полного давления и приемник дросселированного статического давления подключены ко входам пневмоэлектрических преобразователей, выходы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам вертолета, новым является то, что на внешней поверхности верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника на цилиндрическом основании установлен дополнительный осесимметричный приемник, на верхней поверхности которого на оси симметрии расположено отверстие, являющееся приемником для забора полного результирующего набегающего воздушного потока вихревой колонны несущего винта вертолета, симметрично оси симметрии дополнительного осесимметричного приемника в плоскости, параллельной оси симметрии вертолета и ортогональной ей, расположены отверстия, являющиеся приемниками для забора давлений, определяющих угловое положение вектора скорости результирующего набегающего воздушного потока вихревой колонны относительно оси симметрии дополнительного осесимметричного приемника давлений в указанных ортогональных друг другу плоскостях, на поверхности дополнительного осесимметричного приемника в плоскости, ортогональной указанным плоскостям, расположены отверстия, являющиеся приемником для забора статического давления результирующего набегающего воздушного потока вихревой колонны, при этом приемники для забора полного и статического давлений и давлений, определяющих угловое положение результирующего набегающего воздушного потока вихревой колонны, соединены с дополнительными пневмоэлектрическими преобразователями, выходы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору.
В системе воздушных сигналов вертолета дополнительный осесимметричный приемник выполнен в виде сферического тела.
В системе воздушных сигналов вертолета дополнительный осесимметричный приемник выполнен в виде полусферы с диаметром, равным диаметру верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника, которая установлена непосредственно на верхний экранирующий диск.
В системе воздушных сигналов вертолета дополнительный осесимметричный приемник выполнен в виде чечевицы с диаметром, равным диаметру верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника, которая установлена непосредственно на верхний экранирующий диск.
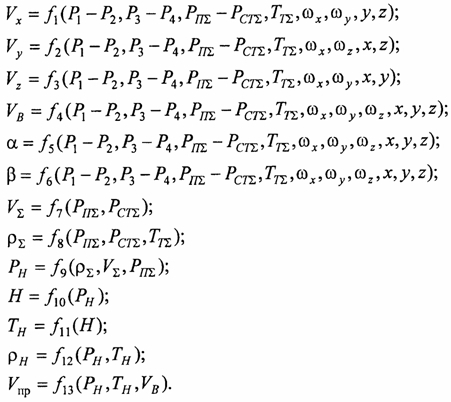
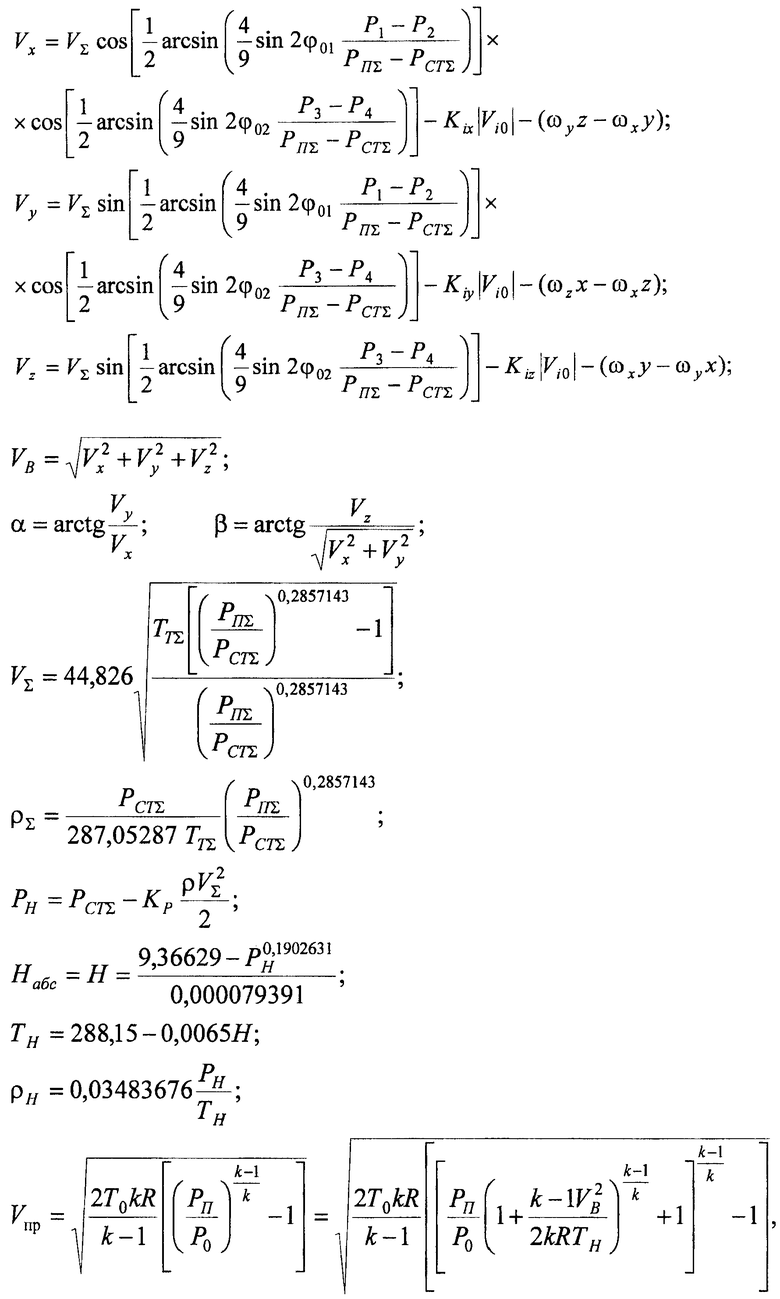
В системе воздушных сигналов вертолета в диапазоне скоростей полета, когда неподвижный многоканальный проточный аэрометрический приемник находится в зоне вихревой колонны несущего винта вертолета, алгоритмы вычисления микропроцессора выполнены согласно уравнениям
Для дополнительного осесимметричного приемника, выполненного в виде сферического тела или в виде полусферы, уравнения для вычисления высотно-скоростных параметров вертолета имеют вид:
где P1, P2 - давления в симметричных точках осесимметричного приемника давлений в плоскости, параллельной плоскости симметрии вертолета; Р3, Р4 - давления в симметричных точках осесимметричного приемника давлений в плоскости, ортогональной плоскости симметрии вертолета; РП∑ - полное давление результирующего набегающего воздушного потока вихревой колонны; РСТ∑ - статическое давление результирующего воздушного потока вихревой колонны несущего винта вертолета; ρ∑ - плотность результирующего набегающего воздушного потока вихревой колонны; TT∑ - температура торможения результирующего набегающего воздушного потока вихревой колонны, воспринимаемая датчиком, например, встроенным в приемник полного давления результирующего набегающего потока вихревой колонны; V∑ - величина (модуль) вектора скорости результирующего набегающего потока вихревой колонны; φ01 и φ02 - углы установки на осесимметричном приемнике отверстий для забора давлений Р1, Р2 и P3, Р4; ωх, ωy, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; VB, Vx, Vy, Vz - величина (модуль) и составляющие вектора истинной воздушной скорости вертолета; α и β - угол атаки и скольжения вертолета; PH, ТН и ρH - абсолютное давление, температура и плотность воздуха на высоте полета Н; Н и Vпр - барометрическая высота и приборная скорость; Kix, Kiy, Kiz KР - коэффициенты, зависящие от координат x, y, z места установки неподвижного комбинированного аэрометрического приемника, определяемые по результатам летных испытаний на вертолете; Р0 и Т0 - абсолютное давление и температура воздуха на уровне моря (Р0=101325 Па, Т0=288,15 K); R и k - удельная газовая постоянная и показатель адиабаты для воздуха (R=287,05287 Дж/(кг·K), k=1,4); |Vi0| - модуль вектора индуктивной скорости несущего винта вертолета на режиме висения при VB=0 (значения входящих в уравнения параметров имеют размерность с системе СИ).
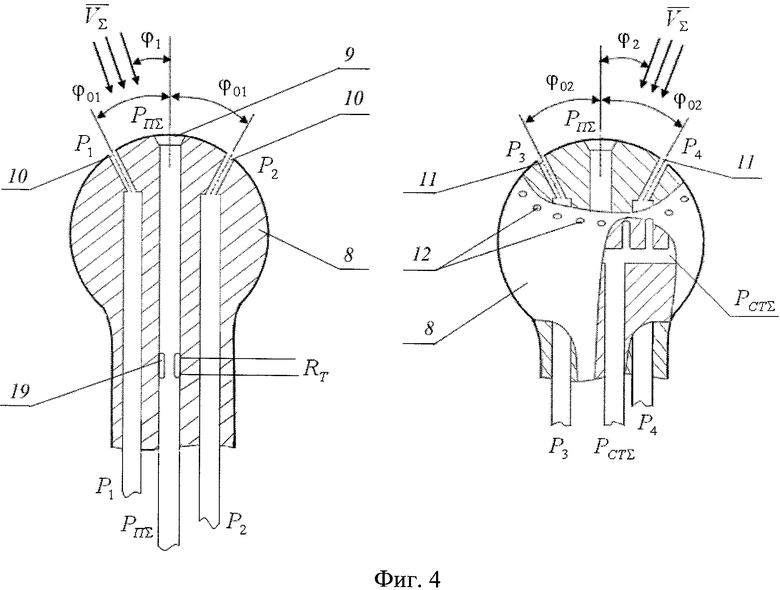
Сущность изобретения поясняется на фиг.3-6. На фиг.3 приведена конструктивная схема неподвижного многоканального аэрометрического приемника с дополнительным осесимметричным аэрометрическим приемником. На фиг.4 приведена конструктивная схема дополнительного осесимметричного аэрометрического приемника в виде сферы с расположенными на ней приемниками давлений результирующего набегающего воздушного потока вихревой колонны. На фиг.5 приведена конструктивная схема неподвижного комбинированного аэрометрического приемника с дополнительным аэрометрическим приемником в виде полусферы. На фиг.6 приведена функциональная схема системы воздушных сигналов вертолета с неподвижным комбинированным аэрометрическим приемником.
Здесь: 1 - неподвижный многоканальный аэрометрический приемник; 2 и 3 - экранирующие диски; 4 - трубки полного давления; 5 - отверстия для забора давлений, определяющих угол атаки набегающего воздушного потока; 7 - цилиндрическое основание; 8 - осесимметричный аэрометрический приемник; 9 - отверстие, являющееся приемником полного давления результирующего набегающего воздушного потока вихревой колонны; 10 - отверстия, являющиеся приемниками для забора давлений, определяющих положение вектора результирующей скорости набегающего воздушного потока вихревой колонны в плоскости, параллельной плоскости симметрии вертолета; 11 - отверстия, являющиеся приемниками для забора давлений, определяющих положение вектора результирующей скорости набегающего воздушного потока вихревой колонны в плоскости, перпендикулярной плоскости симметрии вертолета; 12 - отверстия, являющиеся приемниками статического давления результирующего набегающего воздушного потока вихревой колонны; 13 - пневмоэлектрические преобразователи; 14 - мультиплексор; 15 - аналого-цифровой преобразователь; 16 - микропроцессор; 17 - электроизмерительная схема; 18 - пневмоэлектрические преобразователи; 19 - приемник температуры.
На фиг.3 приведена конструктивная схема комбинированного аэрометрического приемника в виде неподвижного многоканального аэрометрического приемника 1, содержащего два разнесенных по высоте экранирующих диска 2 и 3, между внутренними профилированными поверхностями которых в азимутальной плоскости под одинаковыми углами расположены трубки полного давления 4 для забора давлений Pi, определяющих угол скольжения набегающего воздушного пока, возникающего при продольном движении вертолета. На внутренних профилированных поверхностях экранирующих дисков 2 и 3 расположены отверстия 5 для забора давлений Pαi и Рαi-1, определяющих угол атаки набегающего воздушного потока, возникающего при продольном движении вертолета. На внутренних поверхностях экранирующих дисков 2 и 3 расположены кольцевые каналы 6 для забора дросселированного статического давления Рст.д набегающего воздушного потока, возникающего при продольном движении вертолета.
Для получения информации о высотно-скоростных параметрах вертолета в области малых и околонулевых скоростей полета, когда многоканальный аэрометрический приемник находится в створе вихревой колонны несущего винта вертолета, на наружной поверхности верхнего экранирующего диска 3 на цилиндрическом основании 7 установлен осесимметричный аэрометрический приемник 8. На верхней поверхности осесимметричного аэрометрического приемника 8 на оси симметрии расположено отверстие 9, являющееся приемником полного давления РП∑ результирующего набегающего воздушного потока вихревой колонны несущего винта вертолета.
Симметрично относительно оси симметрии на верхней поверхности осесимметричного приемника 8 в плоскости, параллельной плоскости симметрии вертолета, расположены отверстия 10, являющиеся приемниками для забора давлений Р1 и Р2, определяющих угловое положение вектора  результирующей скорости набегающего воздушного потока вихревой колонны в плоскости, параллельной плоскости симметрии вертолета. Симметрично отверстиям 10 в плоскости, перпендикулярной плоскости симметрии вертолета, на верхней поверхности осесимметричного приемника 8 расположены отверстия 11, являющиеся приемниками для забора давлений Р3 и Р4, определяющих угловое положение вектора
результирующей скорости набегающего воздушного потока вихревой колонны в плоскости, параллельной плоскости симметрии вертолета. Симметрично отверстиям 10 в плоскости, перпендикулярной плоскости симметрии вертолета, на верхней поверхности осесимметричного приемника 8 расположены отверстия 11, являющиеся приемниками для забора давлений Р3 и Р4, определяющих угловое положение вектора  результирующей скорости набегающего воздушного потока в плоскости, перпендикулярной плоскости симметрии вертолета. Перпендикулярно оси симметрии осесимметричного приемника 8 на его поверхности по окружности расположены отверстия 12, являющиеся приемниками статического давления PCT∑ результирующего набегающего воздушного потока вихревой колонны.
результирующей скорости набегающего воздушного потока в плоскости, перпендикулярной плоскости симметрии вертолета. Перпендикулярно оси симметрии осесимметричного приемника 8 на его поверхности по окружности расположены отверстия 12, являющиеся приемниками статического давления PCT∑ результирующего набегающего воздушного потока вихревой колонны.
В целях повышения технологичности и обеспечения повторяемости характеристик комбинированного аэрометрического приемника осесимметричный приемник может быть выполнен в виде установленного на цилиндрическом основании 7 сферического приемника 8 (фиг.4). На верхней поверхности сферического приемника 8 на оси симметрии расположено отверстие 9, являющееся приемником давления РП∑. В плоскости, параллельной плоскости симметрии вертолета, под углом φ01 к оси симметрии на поверхности сферического приемника симметрично расположены отверстия 10, являющиеся приемниками давлений Р1 и Р2. В плоскости, перпендикулярной плоскости симметрии вертолета, симметрично под углом φ02 к оси симметрии на верхней поверхности сферического приемника расположены отверстия 11, являющиеся приемниками давлений Р3 и Р4. Перпендикулярно оси симметрии сферического приемника на его поверхности по окружности расположены отверстия 12, являющиеся приемниками статического давления PCT∑ результирующего набегающего воздушного потока вихревой колонны.
В целях уменьшения аэродинамических искажений, вносимых установленным на цилиндрическом основании осесимметричным аэрометрическим приемником, повышения технологичности и повторяемости характеристик комбинированного аэрометрического приемника осесимметричный приемник может быть выполнен в виде полусферы с диаметром, равным диаметру верхнего экранирующего диска, которая установлена непосредственно на его внешней поверхности (фиг.5). На поверхности полусферы аналогично сферическому аэродинамическому приемнику расположены отверстия, являющиеся приемниками для забора давлений P1 и P2, P3 и P4, РП∑ и ТСТ∑.
Приемники давлений P1 и P2, P3 и P4, РП∑ и ТСТ∑ подключены ко входам пневмоэлектрических преобразователей 13 (фиг.6), выходы которых через последовательно соединенные мультиплексор 14 и аналого-цифровой преобразователь 15 подключены к микропроцессору 16. На вход мультиплексора 14 через электроизмерительную схему 17 также подключены выходы приемника 19 температуры торможения TT∑ результирующего набегающего воздушного потока вихревой колонны несущего винта и выходы пневмоэлектрических преобразователей 18, на входы которых подаются давления Pi, Pαi, Рαi-1, Рст.д, воспринимаемые неподвижным многоканальным проточным аэрометрическим приемником 1. Приемник 19 температуры торможения TT∑ может быть установлен в канале приемника полного давления РП∑ результирующего набегающего потока вихревой колонны.
Выход микропроцессора является выходом системы воздушных сигналов по высотно-скоростным параметрам вертолета: истинной воздушной скорости  , углам атаки α и скольжения β, барометрической высоте Н, составляющим Vx, Vy, Vz вектора
, углам атаки α и скольжения β, барометрической высоте Н, составляющим Vx, Vy, Vz вектора  истинной воздушной скорости на оси связанной системы координат, приборной воздушной скорости Vпр, в том числе и в области малых и околонулевых скоростей полета, когда комбинированный аэрометрический приемник находится в зоне вихревой колонны несущего винта вертолета.
истинной воздушной скорости на оси связанной системы координат, приборной воздушной скорости Vпр, в том числе и в области малых и околонулевых скоростей полета, когда комбинированный аэрометрический приемник находится в зоне вихревой колонны несущего винта вертолета.
Система измерения малых воздушных скоростей вертолета работает следующим образом.
Неподвижный комбинированный аэрометрический приемник, включающий неподвижный многоканальный прочный аэрометрический приемник 1, на верхнем экранирующем диске которого на цилиндрической штанге 2 установлен осесимметричный приемник 3 (фиг.6), устанавливается на фюзеляже в зоне вихревой колонны несущего винта. Ось осесимметричного аэрометрического приемника 3 направлена вверх, при этом плоскость, проходящая через отверстия 10 (фиг.3 и фиг.4) для забора давлений Р1 и Р2, параллельна плоскости симметрии вертолета, а плоскость, проходящая через отверстия 11 для забора давлений Р3 и Р4, ортогональна плоскости симметрии вертолета.
При малых скоростях полета осесимметричный приемник 3 (фиг.6) находится в створе вихревой колонны несущего винта вертолета и воспринимает давления Р1 и Р2, Р3 и Р4, РП∑ и РСТ∑ и температуру TT∑.
Вектор  скорости результирующего набегающего воздушного потока, обтекающего осесимметричный приемник 3, является геометрической суммой вектора
скорости результирующего набегающего воздушного потока, обтекающего осесимметричный приемник 3, является геометрической суммой вектора  скорости невозмущенного воздушного потока, обусловленного поступательным движением вертолета, и вектора
скорости невозмущенного воздушного потока, обусловленного поступательным движением вертолета, и вектора  скорости индуктивного потока несущего винта вертолета, т.е.
скорости индуктивного потока несущего винта вертолета, т.е.

Для конкретного места установки комбинированного аэрометрического приемника на фюзеляже вертолета составляющие Vx, Vy, Vz вектора  в связанной системе координат можно описать уравнениями вида [4]:
в связанной системе координат можно описать уравнениями вида [4]:
где Kix, Kiy, Kiz - безразмерные коэффициенты, зависящие от величины (модуля) вектора скорости  невозмущенного воздушного потока, равного по величине V=VB, а также от углов атаки α и скольжения β вертолета;
невозмущенного воздушного потока, равного по величине V=VB, а также от углов атаки α и скольжения β вертолета;
 - модуль вектора скорости индуктивного потока на режиме висения (V=0); G - текущий вес вертолета;
- модуль вектора скорости индуктивного потока на режиме висения (V=0); G - текущий вес вертолета;  - нормальная перегрузка; ρH - плотность невозмущенного воздушного потока на данной высоте H; F - площадь, ометаемая несущим винтом вертолета; χ - коэффициент заполнения диска несущего винта; g=9,80665 - ускорение свободного падения.
- нормальная перегрузка; ρH - плотность невозмущенного воздушного потока на данной высоте H; F - площадь, ометаемая несущим винтом вертолета; χ - коэффициент заполнения диска несущего винта; g=9,80665 - ускорение свободного падения.
Величину V∑ скорости и плотность ρ∑ результирующего набегающего воздушного потока можно определить по полному РП∑ и статическому PCT∑ давлениям и температуре TT∑ заторможенного результирующего воздушного потока, воспринимаемой приемником температуры торможения, встроенным в приемник полного давления, используя стандартные зависимости по ГОСТ 5212-74 и ГОСТ 4701-81 (ГОСТ 5212-74. Таблица аэродинамическая. Динамические давления и температура торможения воздуха для скорости от 10 до 4000 км/ч. Параметры. М.: Изд-во Стандартов, 1974. - 239 с. - [6], и ГОСТ 4701-81. Атмосфера стандартная. Параметры. М.: Изд-во Стандартов, 1981. - 179 с. - [7]):

где параметры, входящие в формулы (13) и (14), имеют размерности в единицах системы СИ.
Используя соотношение (13), по давлениям РП∑, РСТ∑ и температуре ТТ∑ можно определить V∑ и проекции вектора  результирующего воздушного потока на оси связанной с вертолетом системы координат как
результирующего воздушного потока на оси связанной с вертолетом системы координат как
где φ1 и φ2 - углы, определяющие положение вектора результирующего набегающего потока вихревой колонны относительно плоскостей приемников давлений Р1, Р2 и Р3, Р4.
По давлениям Р1, Р2 и Р3, Р4, воспринимаемым отверстиями 10 и 11, расположенными на верхней поверхности осесимметричного приемника 8 (фиг.3), можно определить углы φ1 и φ2, определяющие положение вектора результирующего набегающего воздушного потока вихревой колоны несущего винта вертолета в соответствии с соотношениями вида

При выполнении осесимметричного приемника в виде сферического тела (фиг.4) или полусферы (фиг.5), используя соотношения, приведенные в работе [2, стр.122], связь давлений P1, P2 и P3, P4, воспринимаемых отверстиями 10 и 11, можно представить в виде
Тогда углы φ1 и φ2, определяющие положение вектора результирующей скорости набегающего воздушного потока вихревой колоны, будут определяться соотношениями

В соответствии с уравнением  получим уравнения для составляющих Vx, Vy, Vz вектора
получим уравнения для составляющих Vx, Vy, Vz вектора  истинной воздушной скорости вертолета вида
истинной воздушной скорости вертолета вида

где V∑ определяется по соотношению (13), т.е. V∑=f4(РП∑, PCT∑, TT∑).
Как показали исследования (см. Козицин В.К. Система воздушных сигналов вертолета на основе свободно-ориентированного приемника давлений. Диссертация на соискание ученой степени кандидата технических наук. Ульяновск. ОАО «Ульяновское конструкторское бюро приборостроения». 2006. - 313 с. - [8]), для конкретного места установки комбинированного аэрометрического приемника давлений на вертолете на каждом из режимов полета по результатам летных испытаний можно определить значения коэффициентов Kix, Kiy, Kiz с достаточной достоверностью.
Тогда по давлениям P1 и P2, P3 и P4, РП∑ и PCT∑ и по температуре торможения TT∑, воспринимаемым неподвижным осесимметричным приемником, например, в виде сферического тела, полусферы или чечевицы, после их преобразования в электрические сигналы с помощью пневмоэлектрических преобразователей 13 и 17 и вводя через мультиплексор 14 и аналого-цифровой преобразователь 15 в микропроцессор 16 (фиг.6) параметры вектора истинной воздушной скорости вертолета в области малых и околонулевых скоростей вычисляются в соответствии с уравнениями вида (9)
При выполнении осесимметричного приемника в виде сферического тела или в виде полусферы уравнения для вычисления высотно-скоростных параметров вертолета имеют вид (10):
где P1, P2 - давления в симметричных точках осесимметричного приемника в плоскости, параллельной плоскости симметрии вертолета; P3, P4 - давления в симметричных точках осесимметричного приемника в плоскости, ортогональной плоскости симметрии вертолета; РП∑ - полное давление результирующего набегающего воздушного потока вихревой колонны; РСТ∑ - статическое давление результирующего воздушного потока вихревой колонны несущего винта вертолета; ρ∑ - плотность результирующего набегающего воздушного потока вихревой колонны; TT∑ - температура торможения результирующего набегающего воздушного потока вихревой колонны, воспринимаемая датчиком, например, встроенным в приемник полного давления результирующего набегающего потока вихревой колонны; V∑ - величина (модуль) вектора скорости результирующего набегающего потока вихревой колонны; φ01 и φ02 - углы установки на осесимметричном приемнике отверстий для забора давлений P1, P2 и P3, P4; ωx, ωy, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; VB, Vx, Vy, Vz - величина (модуль) и составляющие вектора истинной воздушной скорости вертолета; α и β - угол атаки и скольжения вертолета; PH, TH и ρH - абсолютное давление, температура и плотность воздуха на высоте полета H; Н и VПР - арометрическая высота и приборная скорость; Kix, Kiy, Kiz KР - коэффициенты, зависящие от координат x, y, z места установки неподвижного комбинированного аэрометрического приемника, определяемые по результатам летных испытаний на вертолете; P0 и T0 - абсолютное давление и температура воздуха на уровне моря (P0=101325 Па, Т0=288,15 K); R и k - удельная газовая постоянная и показатель адиабаты для воздуха (R=287,05287 Дж/(кг·K), k=1,4); |Vi0| - модуль вектора индуктивной скорости несущего винта вертолета на режиме висения при VB=0 (значения входящих в уравнения параметров имеют размерность с системе СИ).
Следует отметить, что за счет расположения отверстий для забора статического давления PCT∑ результирующего набегающего потока по всей окружности осесимметричного приемника, например, в виде сферического тела или полусферы существенно снижается влияние углового положения вихревой колонны и усредняются пульсации результирующего набегающего воздушного потока, что повышает точность измерения высотно-скоростных параметров вертолета в области малых и околонулевых скоростей полета.
При выходе комбинированного аэрометрического приемника из зоны вихревой колонны не выполняются условия (7) и высотно-скоростные параметры вертолета определяются по давлениям Pi, Pαi, Pαi-1, Рст.д, воспринимаемым неподвижным многоканальным аэрометрическим приемником, в соответствии с уравнениями (3)-(5) и приведенными в работах [3, 4].
Таким образом, предлагаемое выполнение неподвижного комбинированного аэрометрического приемника в виде неподвижного многоканального проточного аэрометрического приемника, на поверхности верхнего экранирующего диска которого установлен осесимметричный приемник с отверстиями для забора полного и статического давлений результирующего набегающего воздушного потока вихревой колонны несущего винта вертолета и отверстиями для забора давлений, определяющих угловое положение вихревой колонны несущего винта относительно осей связанной системы координат, позволило существенно упростить конструкцию, снизить массу и габариты комбинированного аэрометрического приемника, снизить стоимость системы и повысить точность измерения высотно-скоростных параметров вертолета в области малых и околонулевых скоростей полета.
Применение системы измерения малых воздушных скоростей на различных классах вертолетов позволяет повысить безопасность полета, повысить эффективность пилотирования и боевого применения, повысить надежность работы системы в условиях возможных резких возмущений аэродинамического поля вертолета, повысить точность измерения параметров вектора истинной воздушной скорости вертолета в области малых и околонулевых скоростей полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |



Изобретение относится к измерительным устройствам, в частности к устройствам для измерения высотно-скоростных параметров вертолета. Устройство содержит неподвижный многоканальный проточный аэрометрический приемник в виде разнесенных по высоте экранирующих дисков, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки полного давления, а на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемниками дросселированного статического давления. Трубки полного давления и приемник дросселированного статического давления подключены ко входам пневмоэлектрических преобразователей, выходы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам вертолета. Технический результат заключается в упрощении конструкции, снижении массы и габаритов аэрометрического блока, снижении стоимости и повышении точности системы воздушных сигналов вертолета в области малых и околонулевых скоростей полета. 5 з.п. ф-лы, 6 ил.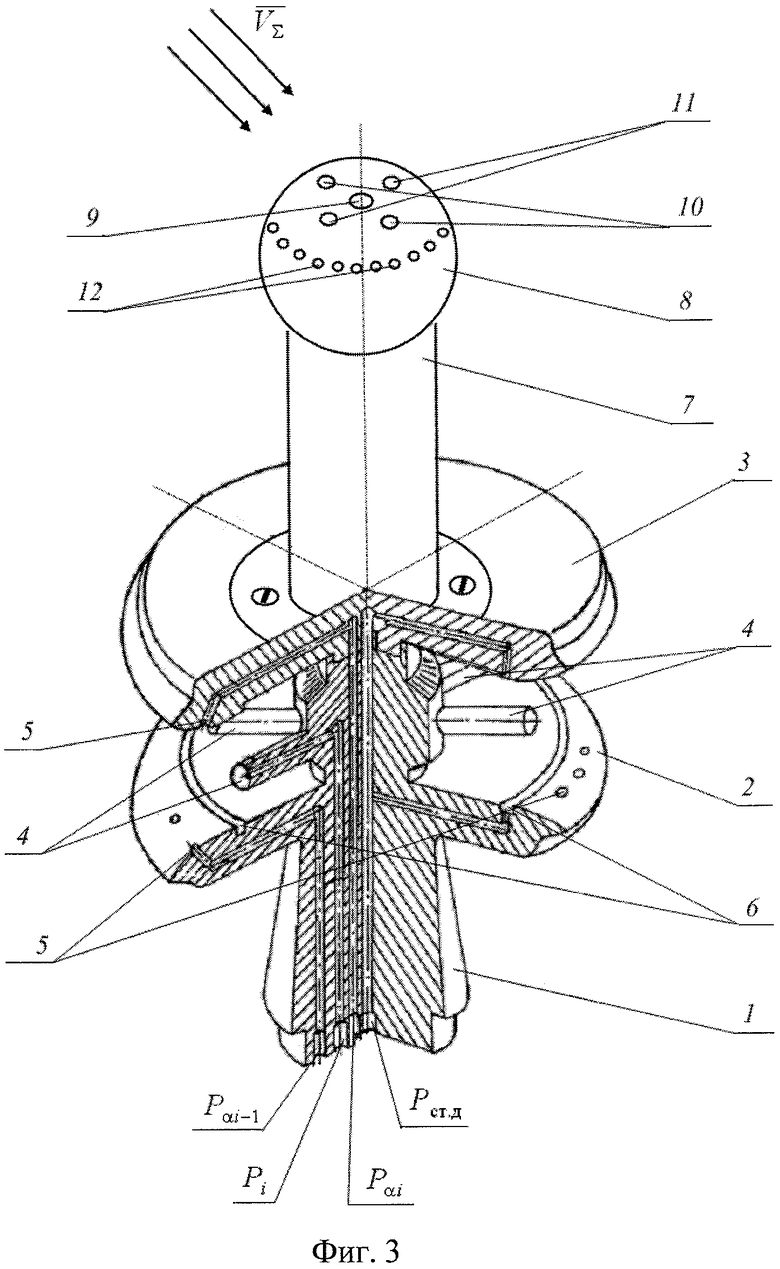
1. Система воздушных сигналов вертолета, содержащая неподвижный многоканальный проточный аэрометрический приемник в виде разнесенных по высоте экранирующих дисков, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки полного давления, а на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемниками дросселированного статического давления, пневмоэлектрические преобразователи, входы которых подключены к трубкам полного и приемнику дросселированного статического давления, выходы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам вертолета, отличающаяся тем, что на внешней поверхности верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника на цилиндрическом основании дополнительно установлен осесимметричный приемник, на верхней поверхности которого на оси симметрии расположено отверстие, являющееся приемником для забора полного давления результирующего набегающего воздушного потока вихревой колонны несущего винта вертолета, симметрично оси симметрии дополнительного осесимметричного приемника в плоскостях, параллельной оси симметрии вертолета и ортогональной ей, расположены отверстия, являющиеся приемниками для забора давлений, определяющих угловое положение вектора скорости результирующего набегающего воздушного потока вихревой колонны относительно оси симметрии дополнительного осесимметричного приемника в указанных ортогональных друг другу плоскостях, на поверхности дополнительного осесимметричного приемника в плоскости, ортогональной указанным плоскостям, расположены отверстия, являющиеся приемником для забора статического давления результирующего набегающего воздушного потока вихревой колонны, при этом приемники для забора полного и статического давлений и давлений, определяющих угловое положение результирующего набегающего воздушного потока вихревой колонны, соединены с дополнительными пневмоэлектрическими преобразователями, выходы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору.
2. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что дополнительный осесимметричный приемник выполнен в виде сферического тела.
3. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что дополнительный осесимметричный приемник выполнен в виде полусферы с диаметром, равным диаметру верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника, которая установлена непосредственно на верхний экранирующий диск.
4. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что дополнительный осесимметричный приемник выполнен в виде чечевицы с диаметром, равным диаметру верхнего экранирующего диска неподвижного многоканального аэрометрического приемника, которая установлена непосредственно на верхний экранирующий диск.
5. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что в диапазоне скоростей полета, когда неподвижный многоканальный проточный аэрометрический приемник находится в зоне вихревой колонны несущего винта вертолета, алгоритмы вычисления микропроцессора выполнены согласно уравнениям
 ;
;


 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

6. Система воздушных сигналов вертолета по п.5, отличающаяся тем, что для дополнительного осесимметричного приемника, выполненного в виде сферического тела или в виде полусферы, уравнения для вычисления высотно-скоростных параметров вертолета имеют вид:




где P1, P2 - давления в симметричных точках осесимметричного приемника в плоскости, параллельной плоскости симметрии вертолета;
P3, P4 - давления в симметричных точках осесимметричного приемника в плоскости, ортогональной плоскости симметрии вертолета;
РПΣ - полное давление результирующего набегающего воздушного потока вихревой колонны;
РСТΣ - статическое давление результирующего воздушного потока вихревой колонны несущего винта вертолета;
ρΣ - плотность результирующего набегающего воздушного потока вихревой колонны;
ТТΣ - температура торможения результирующего набегающего воздушного потока вихревой колонны, воспринимаемая датчиком, например, встроенным в приемник полного давления результирующего набегающего потока вихревой колонны;
VΣ - величина (модуль) вектора скорости результирующего набегающего потока вихревой колонны;
φ01 и φ02 - углы установки на осесимметричном приемнике отверстий для забора давлений Р1, P2 и Р3, Р4,
ωх, ωу, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат;
VB Vx, Vy, Vz - величина (модуль) и составляющие вектора истинной воздушной скорости вертолета;
α и β - угол атаки и скольжения вертолета;
PH, ТН и ρH - абсолютное давление, температура и плотность воздуха на высоте полета Н;
Н и Vпр - барометрическая высота и приборная скорость;
Kix, Kiy, Kiz KP - коэффициенты, зависящие от координат х, у, z места установки неподвижного комбинированного аэрометрического приемника, определяемые по результатам летных испытаний на вертолете;
Р0 и Т0 - абсолютное давление и температура воздуха на уровне моря (Р0=101325 Па, Т0=288,15 K);
R и k - удельная газовая постоянная и показатель адиабаты для воздуха (R=287,05287 Дж/(кг K), k=1,4);
|Vi0| - модуль вектора индуктивной скорости несущего винта вертолета на режиме висения при VB=0 (значения входящих в уравнения параметров имеют размерность в системе СИ).
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| Козицин В.К., Макаров Н.Н., Порунов А.А., Солдаткин В.М | |||
| Анализ принципов построения систем воздушных сигналов вертолета | |||
| Авиакосмическое приборостроение, 2003, №10, с.2-13 | |||
| Петунин А.Н | |||
| Методы и техника измерения параметров газового потока | |||
| - М.: Машиностроение, 1972, 392 с | |||
| Браславский Д.А | |||
| Приборы и датчики летательных аппаратов | |||
| - М.: Машиностроение, 1970, 392 с. | |||

