фигЗ
Изобретение относится к горному делу и строительству подземных коммуникаций бестраншейным способом и может быть использовано при забивке в грунт труб открытым торцом пневмопробойниками.
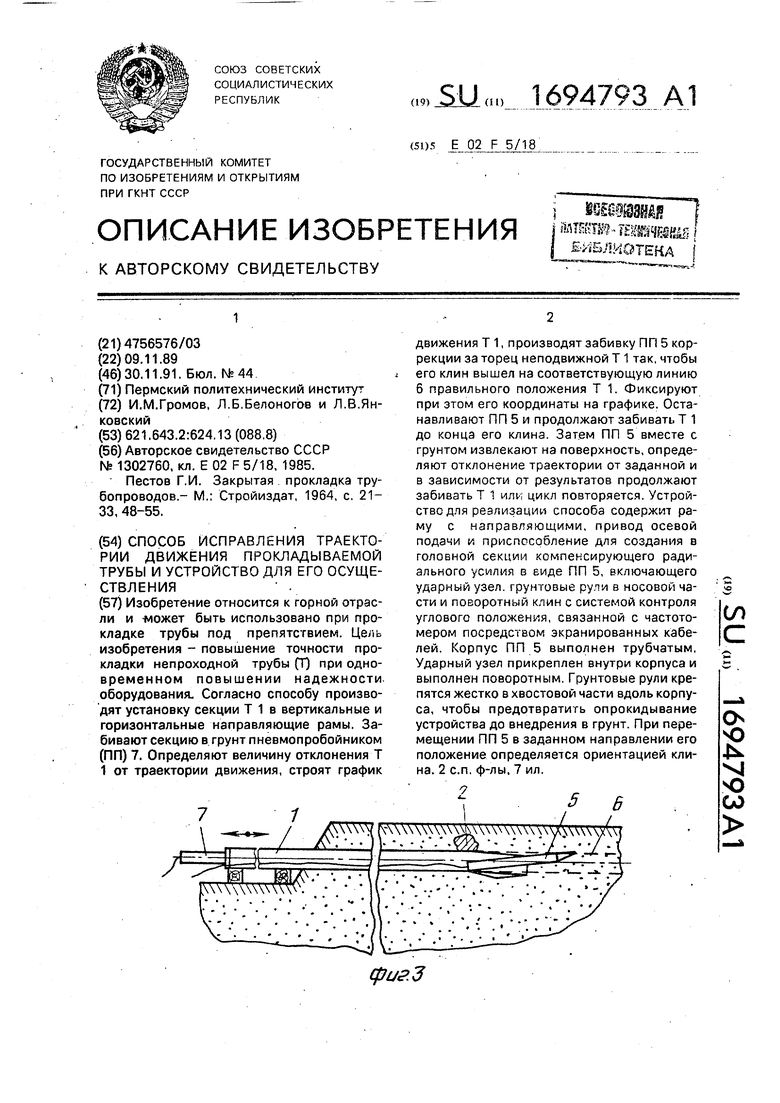
Цель изобретения - повышение точности прокладки непроходимой трубы при одновременном повышении надежности оборудования.
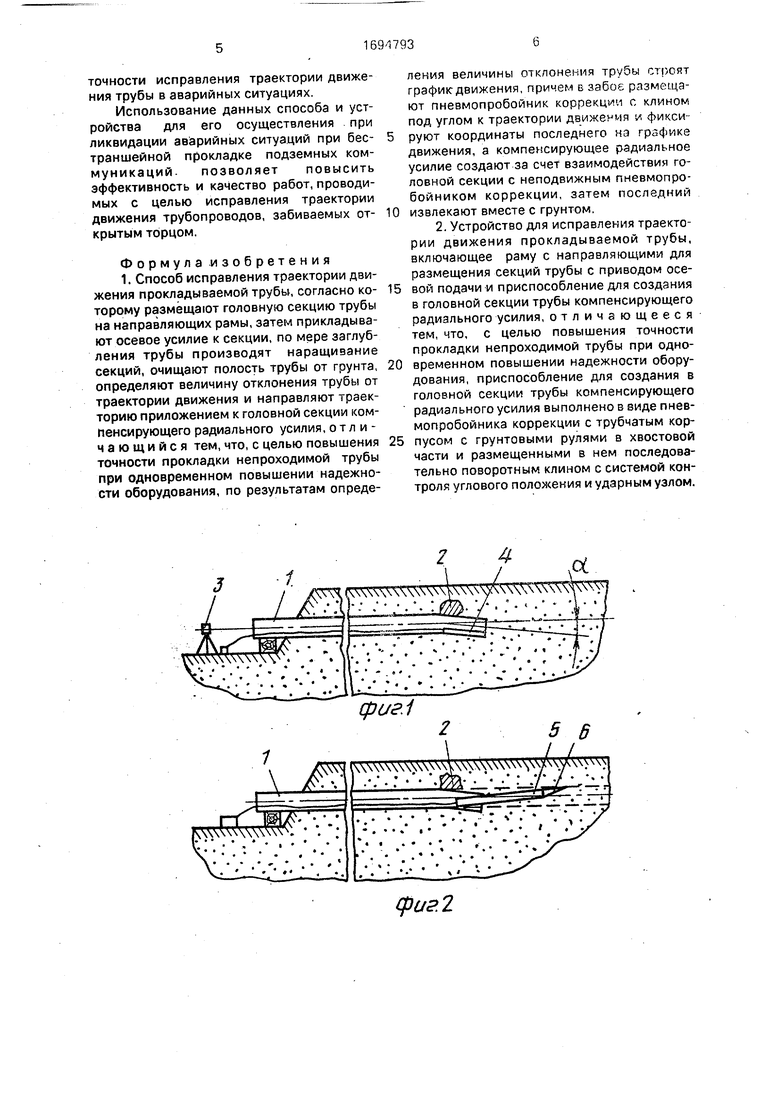
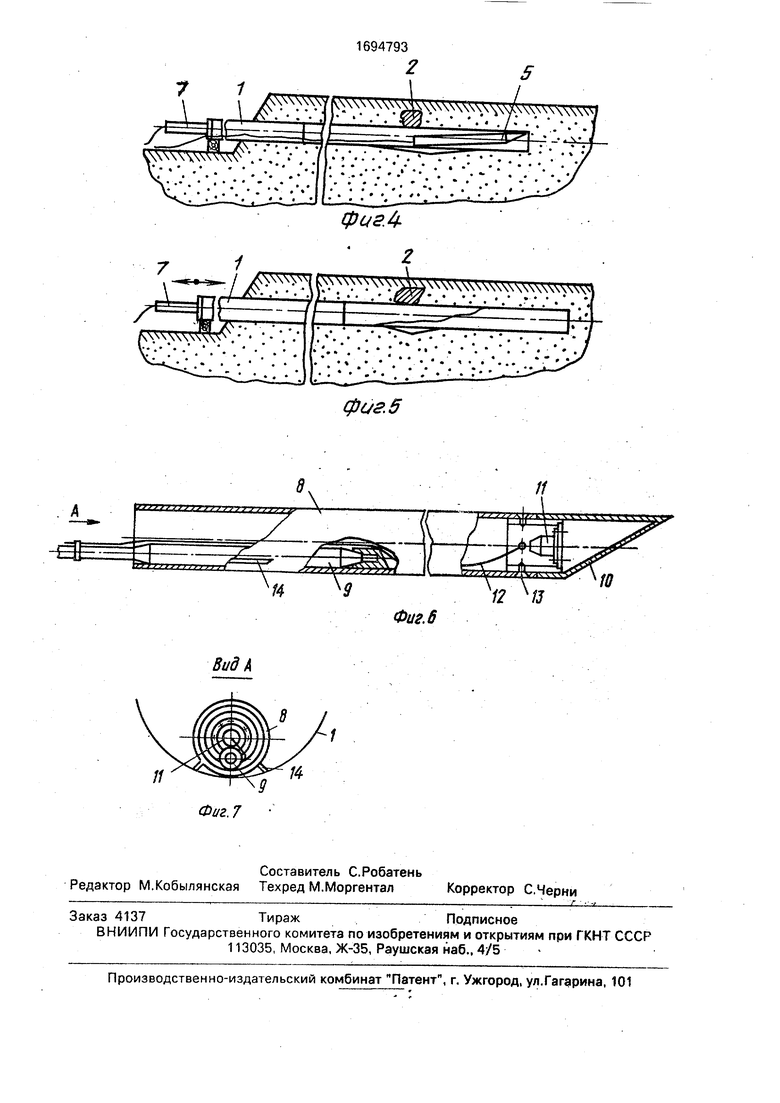
На фиг. 1-5 показаны стадии осуществления способа исправления траектории забиваемых труб; на фиг.6 - пневмопробой- ник коррекции, общий вид; на фиг.7 - вид А на фиг.6.
Способ осуществляют следующим образом.
При забивании трубы 1 в грунт и увода ее под действием препятствия 2 в сторону, определяют после очистки трубы грунтоза- борным устройством угол а отклонения трубы 1 от заданной траектории движения, например, с помощью теодолита 3 и точечного источника света, расположенного на торце грунтозаборного приспособления 4. Строят график движения труб в масштабе, наносят на нем создавшуюся ситуацию. Производят забивку за торец неподвижной трубы 1 пневмопробойника 5 коррекции так, чтобы его клин вышел на соответствующую линию 6 правильного положения трубы 1. При этом фиксируют движение пневмопробойника 5 коррекции на графике с помощью системы контроля углового положения и длины пройденного пути. После выхода клина пневмопробойника 5 коррекции в заданную точку линии 6 движение его прекращают. Начинают снова забивать трубу 1 пневмопробойником. Головная секция трубы 1 движется по корпусу пневмопробойника 5 коррекции как по направляющей, чем создается компенсирующее радиальное усилие, После дохождения торца трубы 1 до конца клина пневмопробойника 5 коррекции (фиксируется с помощью меток на трубе и по длине шланга пневмопробойника 5 коррекции) трубу 1 останавливают. Пневмопробойник 5 коррекции оказывается внутри трубы 1 в зоне разрыхленного грунта и легко извлекается на поверхность. Труба 1 очищается от грунта и с помощью теодолита 3 и приспособле- ния 4 определяется ее отклонение. Убедившись в исправлении траектории, продолжают дальнейшую забивку трубы 1 пневмопробойником 7.
Устройство для исправления траектории движения прокладываемой трубы включает раму с направляющими для размещения секций трубы с приводом осевой подачи и приспособление для создания
в головной секции трубы компенсирующего радиального усилия. Последнее выполнено в виде пневмопробойника 5 коррекции с трубчатым корпусом 8. В нем размещены
последовательно ударный узел 9 и поворотный клин 10 с системой 11 контроля углового положения. Последняя связана экранированным кабелем 12 с частотомером на поверхности. Клин 10 закреплен в корпусе
0 8 четырьмя винтами 13. 8 хвостовой части корпуса 8 закреплены грунтовые рули 14.
Пневмопробойник коррекции работает следующим образом.
Под действием ударного узла 9 трубча5 тый корпус 8 перемещается к торцу трубы 1 по дну. Центрирование направления движения происходит за счет грунтовых рулей 14 и нижнего расположения ударного узла 9 в трубчатом корпусе 8. Достигнув грунтового
0 массива, корпус 8 внедряется носовой частью с клином 10 в грунт и под действием подъемной силы движется по кривой траектории. Координаты положения клина 10 в пространстве определяют с помощью сис5 темы 11 контроля углового положения последовательными замерами величины пройденного пути и показаний датчика тангажа (при допустимых значениях по крену), которые откладывают на графике движения
0 в масштаЬе. После выхода клина 10 в заданную точку линии 6 движение прекращается. В зависимости от направления отклонения траектории (еверх, вниз, вправо, влево по ходу) устанавливается носовая часть с кли5 ном 10 с помощью винтов 13. Головки винтов 13 выполнены заподлицо с корпусом. Реверс пневмопробойника 5 коррекции осуществляется за счет заднего хода ударного узла 9.
0
Пример. При забивании трубы диаметром 0,325 м на длину 95 м под железнодорожным полотном станции Пермь - Сортировочная было зафиксировано на рас5 стоянии 40 м отклонение от прямолинейности. Труба опускалась под углом, равным 0°20 . Отклонение составляло 0,21 м, Было принято решение об исправлении отклоне ния предлагаемым способом,
0 При этом длина пневмопробойника 5 коррекции была 4,5 м, а диаметр - 0,16 м. Угол атаки клина 30°. Как движитель (ударный узел 9) использовался пневмопробой- ник ИП 4605А. Труба забивалась
5 пневмопробсйником СО-134А и добивалась пневмопробойником СО-166, После проведения операций, описанных в способе, отклонение вниз составило 0°0б , т.е. в допустимых пределах для данной проходки. Это позволяет сделать вывод о повышении
точности исправления траектории движения трубы в аварийных ситуациях.
Использование данных способа и устройства для его осуществления при ликвидации аварийных ситуаций при бес- траншейной прокладке подземных коммуникаций, позволяет повысить эффективность и качество работ, проводимых с целью исправления траектории движения трубопроводов, забиваемых от- крытым торцом.
Формула изобретения 1. Способ исправления траектории движения прокладываемой трубы, согласно ко- торому размещают головную секцию трубы на направляющих рамы, затем прикладывают осевое усилие к секции, по мере заглубления трубы производят наращивание секций, очищают полость трубы от грунта, определяют величину отклонения трубы от траектории движения и направляют траекторию приложением к головной секции компенсирующего радиального усилия,отличающийся тем, что, с целью повышения точности прокладки непроходимой трубы при одновременном повышении надежности оборудования, по результатам определения величины отклонения трубы строят график-движения, причем в забое размещают пневмопробойник коррекции с клином под углом к траектории движения и фиксируют координаты последнего на графике движения, а компенсирующее радиальное усилие создают за счет взаимодействия головной секции с неподвижным пневмопро- бойником коррекции, затем последний извлекают вместе с грунтом.
2. Устройство для исправления траектории движения прокладываемой трубы, включающее раму с направляющими для размещения секций трубы с приводом осевой подачи и приспособление для создания в головной секции трубы компенсирующего радиального усилия, отличающееся тем, что, с целью повышения точности прокладки непроходимой трубы при одновременном повышении надежности оборудования, приспособление для создания в головной секции трубы компенсирующего радиального усилия выполнено в виде пнев- мопробойника коррекции с трубчатым корпусом с грунтовыми рулями в хвостовой части и размещенными в нем последовательно поворотным клином с системой контроля углового положения и ударным узлом.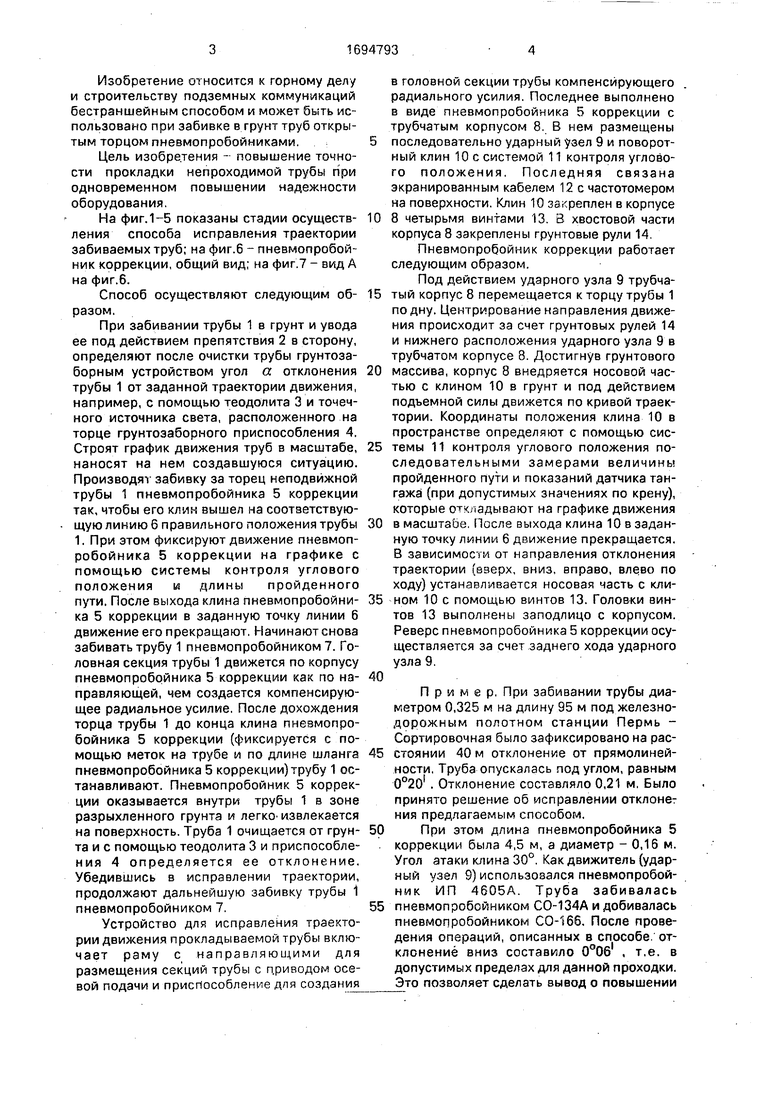
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКТИРУЕМОЙ ПО НАПРАВЛЕНИЮ ПРОХОДКИ СКВАЖИНЫ | 1996 |
|
RU2122074C1 |
| Способ образования горизонтальных скважин | 1990 |
|
SU1802052A1 |
| Способ стабилизации прямолинейного движения трубопровода при его прокладке | 1989 |
|
SU1707147A1 |
| СПОСОБ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1991 |
|
RU2047697C1 |
| СПОСОБ ОБРАЗОВАНИЯ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 1998 |
|
RU2156847C2 |
| СПОСОБ ЗАБИВАНИЯ В ГРУНТ ДЛИННОМЕРНЫХ ЭЛЕМЕНТОВ, НАПРИМЕР ТРУБ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2030516C1 |
| Установка для бестраншейной прокладки трубопроводов | 1988 |
|
SU1548360A1 |
| СПОСОБ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБОПРОВОДА | 2006 |
|
RU2326284C1 |
| СПОСОБ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1995 |
|
RU2103444C1 |
| МАШИНА УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПРОХОДКИ СКВАЖИН В ГРУНТЕ | 1997 |
|
RU2135700C1 |
фиг2
.. . .
v.. .,
фс/гЛ
I NN l xy: } w44444444444 / /..- . .)). t .. .. .-.. .. . . . . .
фиг. 5
9
11
/4
12 Ч0
Фиг. 6
| Авторское свидетельство СССР № 1302760, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пестов Г.И | |||
| Закрытая прокладка трубопроводов.- М,: Стройиздат, 1964, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
