Предложение относится к способам непрерывной регистрации траектории точки контакта колеса подвижного состава с рельсом.
Отличие предлагаемого способа заключается в том, что регистрируют разность между значением напряжения, пропорционального вертикальному перемещению кузова подвижного состава, и значением напряжения, пропорционального изменению расстояния между кузовом и буксой.
Значение напряжения, пропорционального вертикальному перемещению кузова, получают путем двойного интегрирования электрического сигнала измерителя ускорения, установленного в кузове экипажа, и значение напряжения, пропорционального изменению расстояния между кузовом и буксой, получают при помощи прогибомера, также установленного на экипаже.
Операции интегрирования и суммирования производят посредством электронной аналоговой вычислительной машины.
Предлагаемый способ позволяет регистрировать фактическую траекторию точки контакта колеса с рельсом, что расширяет возможности теоретического изучения динамики подвижного состава, а также облегчает задачу содержания рельсового пути на надлежащем уровне.
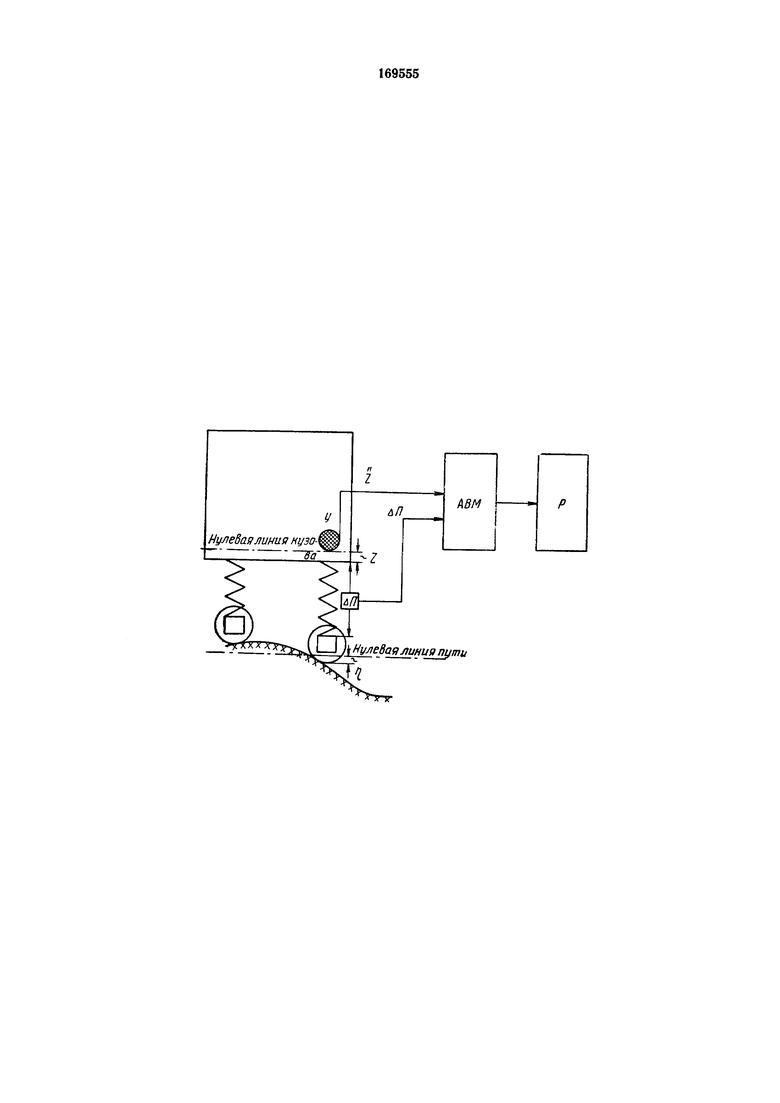
На чертеже схематически изображено устройство для осуществления предлагаемого способа.
Вагон движется с некоторой скоростью по пути, имеющему неровности η в вертикальной плоскости. Над буксой колесной пары в кузове установлен ускорениемер сейсмического типа с электрической системой записи. Электрическое напряжение на выходе ускорениемера пропорционально ускорению  . Изменение расстояния между кузовом и буксой колесной пары (динамический прогиб рессор) регистрируется Электрическим прогибомером. Электрическое напряжение на его выходе пропорционально изменению расстояния ΔП между кузовом и буксой.
. Изменение расстояния между кузовом и буксой колесной пары (динамический прогиб рессор) регистрируется Электрическим прогибомером. Электрическое напряжение на его выходе пропорционально изменению расстояния ΔП между кузовом и буксой.
Для обычного жесткого колеса изменение этого расстояния (динамический прогиб рессор) есть разность между смещением Z кузова в пространстве и смещением колеса вследствие движения его по неровности пути, т.е. η.
ΔП=Z - η
Из этого уравнения можно определить неровность
η=Z - ΔП
Вертикальное перемещение Z кузова определяется путем двойного интегрирования электрического сигнала, получаемого от ускорениемера У, и из полученного напряжения вычитается напряжение, получаемое от прогибомера, регистрирующего изменение расстояния ΔП между кузовом и буксой.
Операции интегрирования и суммирования осуществляются с помощью любой электронной аналоговой вычислительной машины АВМ. Регистрация напряжения, получаемого на выходе сумматора, представляющего собой в определенном масштабе траекторию движения буксы, регистрируется любым способом, например осциллографом Р.
1. Способ непрерывной регистрации траектории точки контакта колеса подвижного состава с рельсом, отличающийся тем, что, с целью определения фактической траектории точки контакта колеса с рельсом, регистрируют разность между значением напряжения, пропорционального вертикальному перемещению кузова подвижного состава, и значением напряжения, пропорционального изменению расстояния между кузовом и буксой.
2. Способ по п. 1, отличающийся тем, что значение напряжения, пропорционального вертикальному перемещению кузова, получают путем двойного интегрирования электрического сигнала измерителя ускорения, установленного в кузове экипажа.
3. Способ по п. 1, отличающийся тем, что значение напряжения, пропорционального изменению расстояния между кузовом и буксой, получают при помощи прогибомера, также установленного на экипаже.
