Способ оценки состояния железнодорожного пути относится к методам контроля железнодорожного пути по данным путеизмерительных вагонов.
Известен способ оценки состояния пути, заключающийся в том, что с помощью измерительных устройств, смонтированных в путеизмерительном вагоне в процессе его движения, при определенной скорости измеряют просадки рельсовых нитей, перекосы пути, положение пути в поперечном уровне и в плане, ширину рельсовой колеи /Способ контроля и измерения параметров положения рельсовых нитей: патент 80932, ГДР, МКИ. 19а 29/38, опубл. 1970/.
Этот способ не позволяет оценивать состояние пути по параметрам взаимодействия пути и подвижного состава.
Известен способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (ЭВМ) и измерительных устройств, смонтированных в путеизмерительном вагоне, заключающийся в том, что в процессе движения вагона при определенной скорости измеряют положение рельсовой колеи: просадки рельсовых нитей, положение пути по уровню и в плане, ширину рельсовой колеи, электрические сигналы, пропорциональные величины измеряемых параметров, подают на ЭВМ, предварительно в ЭВМ вводят допуск по каждому параметру, посредством ЭВМ сравнивают величины каждого измеряемого параметра с допустимыми, определяют отступления измеренных величин от допусков и затем для заданной длины контролируемого участка пути подсчитывают их количество [Оценка пути с помощью ЭВМ, 1971, № 10, с.28].
Существующий способ оценки состояния железнодорожного пути по данным путеизмерителя имеет недостатки. Основные из них связаны с тем, что:
1) нет возможности оценить действие экипажа на пути при скоростях движения, отличных от скорости движения путеизмерителя;
2) нет возможности дифференцировать воздействие на пути различных типов экипажей (локомотивов, вагонов грузовых, пассажирских, электросекций, автомотрис);
3) нет возможности оценить безопасность движения экипажа по таким параметрам, как коэффициент безопасности по вползанию гребня колеса на рельс, динамическая ширина рельсовой колеи и параметрам, характеризующим прочность пути;
4) нет возможности оценить влияние совпадения на одном месте по длине пути двух и более различных отступлений положения пути от нормы на динамические параметры движения экипажа.
Известен способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (ЭВМ) и измерительных устройств, смонтированных в путеизмерительном вагоне, заключающийся в том, что в процессе движения вагона при определенной скорости измеряют положение рельсовой колеи: просадки рельсовых нитей, положение пути по уровню и в плане, ширину рельсовой колеи, электрические сигналы, пропорциональные величины измеряемых параметров, подают на ЭВМ, предварительно в ЭВМ вводят допуск по каждому параметру, закладывают в ЭВМ математическую модель взаимодействия оцениваемого пути и экипажа при требуемой скорости его движения, одновременно с параметрами положения рельсовой колеи измеряют неровности на рабочей поверхности рельса и модуль упругости подрельсового основания, по введенным в ЭВМ величинам положения рельсовой колеи, неровностей на рабочей поверхности, модуля упругости подрельсового основания, а также фактической скорости путеизмерителя в процессе его движения решают системы алгебраических и дифференциальных уравнений упомянутой математической модели, определяют перемещения элементов системы экипаж-путь, напряжения в элементах пути и их изменения во времени, рамные силы, силы инерции колесной пары, вертикальные нагрузки, передаваемые на шейки колесных пар, вертикальную и горизонтальную силы от колеса на рельс, а также направляющее усилие, по полученным данным вычисляют коэффициент устойчивости рельсошпальной решетки поперечному сдвигу, коэффициент безопасности по вползанию гребня колеса на рельс, динамическую ширину рельсовой колеи, основные напряжения в кромках подошвы и головки рельса, тензор контактных напряжений рельса, продольные силы, обусловленные угоном пути, выводят эти данные и данные об отступлениях рассчитанных параметров, а также измеряемых параметров на регистрацию и печать с привязкой к протяженности пути /Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (ЭВМ) и измерительных устройств, смонтированных в путеизмерительном вагоне: патент 618476, СССР, опубл. 1978/.
Данный способ не учитывает влияние продольных усилий, передаваемых от соседних вагонов.
Техническим результатом изобретения является получение более достоверных данных о состоянии железнодорожного пути, определяют места, где требуется устранить неисправности пути или ограничить скорость движения исследуемого типа экипажа, устанавливают предельно возможную скорость для тех мест на пути, где имеются отступления рассчитываемых параметров КУ.П.С., η, sA, σon, σor, qo от допусков.
Способ оценки состояния железнодорожного пути, заключающийся в том, что в процессе движения вагона при определенной скорости измеряют положение рельсовых нитей, положение пути по уровню и в плане, ширину рельсовой колеи, электрические сигналы, пропорциональные величинам измеряемых параметров, подают на ЭВМ, предварительно в ЭВМ вводят допуски по каждому параметру, посредством ЭВМ сравнивают величины каждого измеряемого параметра с допустимыми, определяют отступления измеренных величин от допусков и затем для заданной длины контролируемого участка пути подсчитывают их количество, перед поездкой закладывают в ЭВМ математическую модель взаимодействия оцениваемого пути и экипажа при требуемой скорости его движения, одновременно с параметрами положения рельсовой колеи измеряют неровности на рабочей поверхности рельса, модуль упругости подрельсового основания и коэффициенты демпфирования и жесткости в сцеплениях вагонов, по введенным в ЭВМ величинам решают систему алгебраических и дифференциальных уравнений упомянутой математической модели, определяют перемещения элементов системы экипаж-путь, напряжения в элементах пути и их изменения во времени, рамные силы Yr, силы инерции колесной пары J1, J2, вертикальные нагрузки, передаваемые на шейки колесных пар, P1, Р2, вертикальную Р и горизонтальную Y' силы от колеса на рельс, а также направляющее усилие Y, по полученным данным вычисляют коэффициент устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С., коэффициент безопасности по вползанию гребня колеса на рельс η, динамическую ширину рельсовой колеи SA, основные напряжения в кромках подошвы σon и головки σor рельса, тензор контактных напряжений рельса qo продольные силы, обусловленные угоном пути, F, величины параметров КУ.П.С., η, SA, σon, σor, qo от допусков, выводят эти данные и данные об отступлениях рассчитанных параметров, а также измеряемых параметров на регистрацию и печать с привязкой к протяженности пути.
Особенностью является то, что в математическую модель вводятся уравнения, определяющие влияние продольных сил передаваемых от соседних вагонов на движение экипажа.
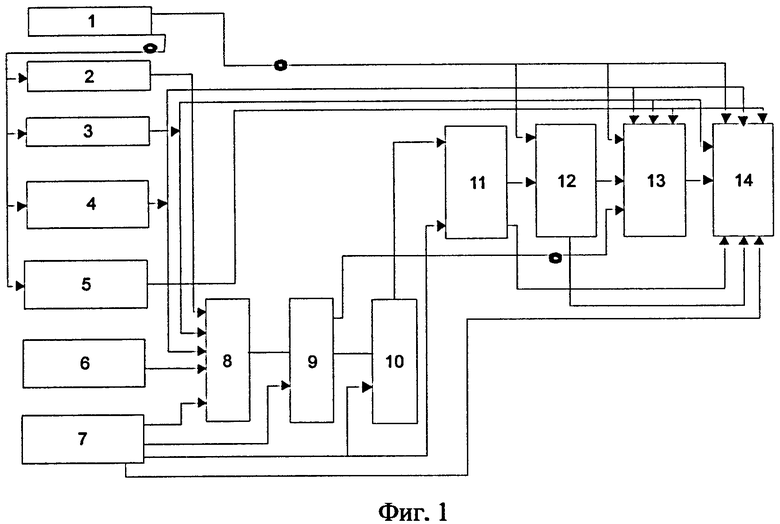
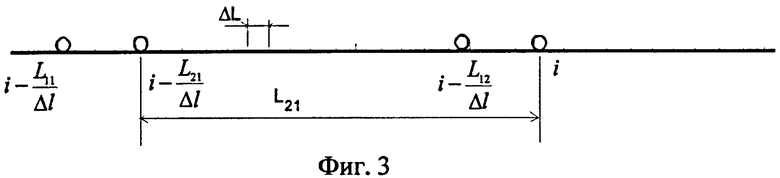
На фиг.1 представлена блок-схема операций автоматической оценки состояния пути в процессе контроля его путеизмерительным вагоном, исходя из воздействия на путь различных типов экипажей, а также безопасности их движения при различных скоростях, на фиг.2 - расчетная схема исследуемого экипажа, например, моторного вагона электропоезда, вид сбоку, на фиг.3 - необходимое для расчета информационное поле измеряемых параметров в момент времени t1 и указаны координаты точек пути, например
 ,
,
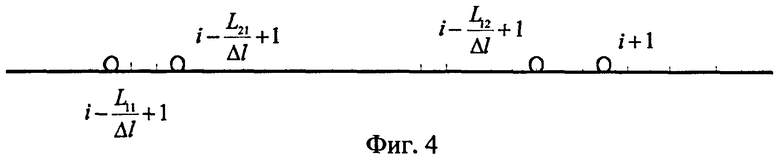
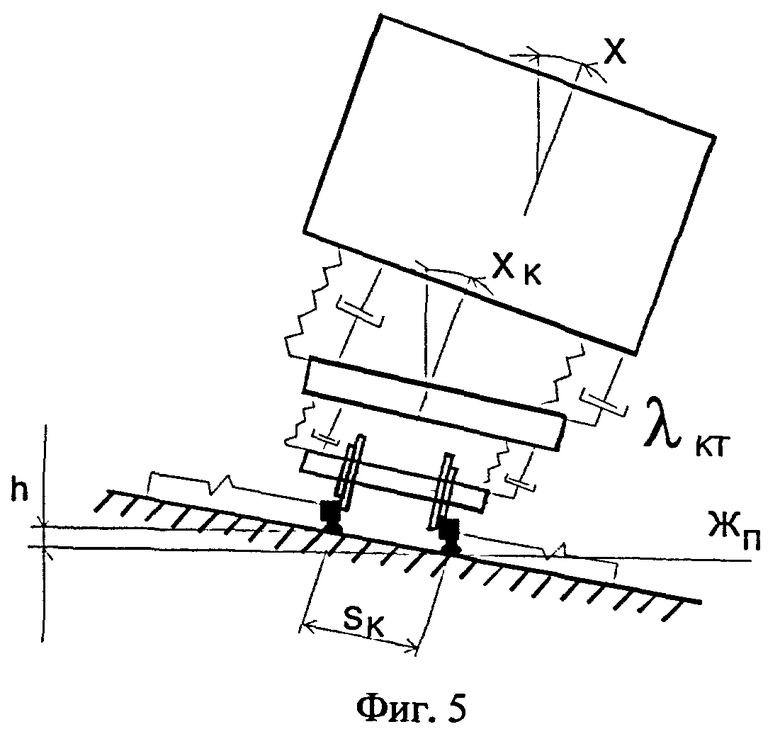
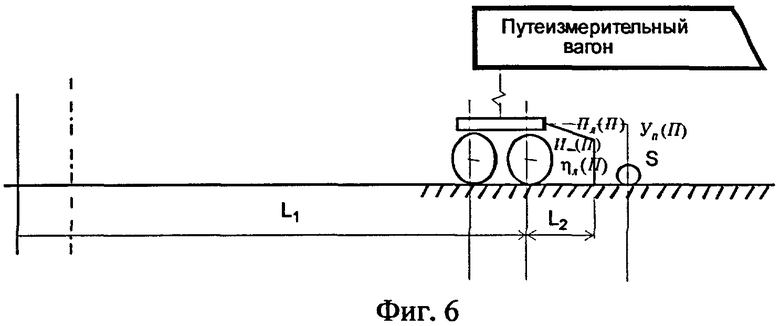
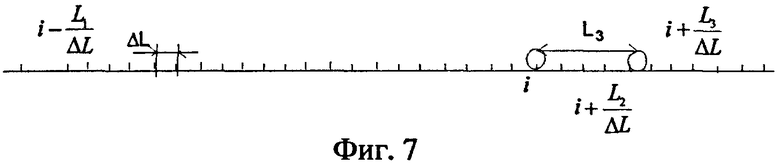
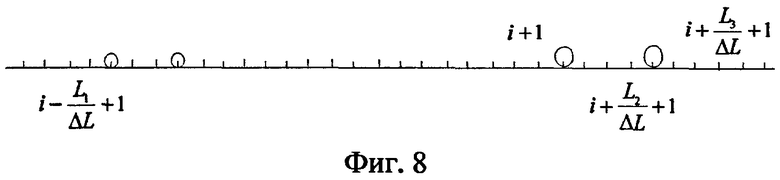
измеряемые параметры, в которых используют для расчета в момент времени t1; на фиг.4 - необходимое для расчета информационное поле измеряемых параметров в момент времени ti+1; на фиг.5 - расчетная схема исследуемого экипажа, вид сзади; на фиг.6 - схема расположения измерительных устройств путеизмерительного вагона на пути по отношения к положению исследуемого экипажа; на фиг.7 - информационное поле измеряемых параметров в момент времени t1; на фиг.8 - то же, в момент времени ti+1.
При этом на фиг.1: 1 - блок измерения координаты прохождения пути путеизмерителем; 2 - блок измерения фактической скорости путеизмерителя; 3 - блок измерения модуля упругости подрельсового основания; 4 - блок измерения значений параметров положения рельсовой колеи (просадок, ширины колеи, положения пути по уровню и в плане); 5 - блок измерения неровностей на рабочей поверхности рельсов (волнообразного износа, пробуксовин, выбоин, ступенек в стыке, неровностей на боковой грани); 6 - блок задания математической модели (система алгебраических и дифференциальных уравнений) взаимодействия пути и исследуемого типа экипажа на требуемой скорости; 7 - блок задания априорной информации (констант, коэффициентов, условий, допусков), формул расчета; 8 - блок решения алгебраических и диффиренциальных уравнений и определения перемещений элементов системы экипаж-путь и их изменение во времени; 9 - блок определения рамных сил Yp, сил инерции необрессоренных масс J1, J2, вертикальных нагрузок, передаваемых на шейки колесных пар Р1, Р2, вертикальной Р и горизонтальной Y сил от колеса на рельс, направляющего усилия колеса Y, величины продольных сил от соседних вагонов Fпрод, коэффициента устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С., коэффициента безопасности по вползанию гребня колеса на рельс η, динамической ширины колеи s0, основных напряжений в кромках подошвы σon и головки σor рельса, тензора контактных напряжений рельса qo, продольных сил, обусловленных угоном пути, F; 10 - блок сравнения расчетных параметров КУ.П.С., η, sA, σon, σor, qo с допусками; 11 - блок определения величин отступлений рассчитанных параметров КУ.П.С., η, sA, σon, σor, qo от допусков; 12 - блок определения мест наличия отступлений и мест, где требуется устранить неисправности пути или ограничить скорость движения исследуемого типа экипажа; 13 - блок определения предельно возможной скорости для тех мест на пути, где имеются отступления рассчитанных параметров КУ.П.С., η, sA, σon, σor, qo от допусков; 14 - блок регистрации и печати данных.
На фиг.2-4 приняты следующие обозначения:
L11 - расстояние между крайними осями колесных пар;
L12, L2l - расстояния между осью передней колесной пары и осями позади лежащих колесных пар;
ΔL - шаг квантования по пути.
На фиг.5-8 приняты следующие обозначения:
L1 - расстояние между крайней задней осью исследуемого экипажа и измерительной осью колесной пары путеизмерительной осью колесной пары путеизмерительного вагона, под которой измеряют параметры нагруженного продольного профиля (просадок) пути ηЛ(П) по левой и правой рельсовым нитям, положения пути по уровню h, модуль упругости подрельсового основания ИЛ(П) под левой и правой рельсовым нитям;
L2 - расстояние между измерительной осью колесной пары и измерительными элементами, фиксирующими неровности рабочих поверхностей левого и правого рельсов ПЛ(П);
L3 - расстояние между измерительной осью колесной пары и измерительными элементами, посредством которых фиксируется положение в плане в ненагруженных точках по левому и правому рельсу УЛ(П) и ширину рельсовой колеи S.
Для реализации предлагаемого способа используется движущийся путеизмерительный вагон, который оборудован устройствами для измерений положения рельсовой колеи: просадок каждой нагруженной рельсовой нити, положения нагруженного пути по уровню, ширины рельсовой колеи, положения каждой рельсовой нити в плане, в ненагруженных точках, неровностей на рабочей поверхности рельсов: волнообразного износа, впадин за закаленной зоной рельсовых концов, ступенек в стыках, пробуксовин, выбоин, неровностей на боковой грани, и модуля упругости подрельсового основания.
Для измерения скорости перемещения и координаты прохождения пути путеизмерительный вагон снабжен соответствующими устройствами. Каждое измерительное устройство обеспечивает выдачу измеряемого параметра в виде электрического пропорционального сигнала.
На путеизмерителе смонтирована электронная вычислительная машина (ЭВМ) для реализации вычислительных операций.
ЭВМ выполняет следующие вычислительные операции:
1) решение систем алгебраических и дифференциальных уравнений взаимодействия пути и исследуемого типа экипажа на требуемой скорости: движения с определением перемещений элементов системы экипаж-путь и их изменений во времени;
2) вычисление рамных сил Yr; сил инерции необрессоренных масс каждого колеса колесной пары J1, J2; вертикальных нагрузок, передаваемых на обе шейки колесной пары Р1, Р2; вертикальной Р и горизонтальной Y сил от колеса на рельс; направляющего усилия колеса Y; величины продольных сил, передаваемых соседними вагонами Fпрод, коэффициента устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С.; коэффициента безопасности по вползанию гребня колеса на рельс η; динамической ширины рельсовой колеи SД; основных напряжений в кромках подошвы σon и головки σor рельса; тензора контактных напряжений рельса qo продольных сил, обусловленных угоном пути F;
3) сравнение расчетных параметров КУ.П.С., η, sA, σon, σor, qo с допусками;
4) определение мест наличия отступлений этих параметров от допусков и тем самым мест устранения неисправностей пути или ограничения скорости движения исследуемого типа экипажа;
5) определение предельно возможной скорости движения исследуемого типа экипажа по условию: безопасности его движения по пути, имеющему неисправности, в пределах контролируемого участка.
Указанные вычислительные операции осуществляют в реальном масштабе времени движения путеизмерителя.
Измерительные устройства имеют непосредственную связь со входами ЭВМ или через преобразовательные устройства, обеспечивающие сопряжения входов ЭВМ с измерительными устройствами.
ЭВМ снабжена устройствами ввода априорной информации, т.е. той, которая задается до начала расчетов, необходимых при вычислении коэффициентов, констант, допусков, условий и т.п., формул расчета, математической модели взаимодействия пути и исследуемого типа экипажа. Вводными устройствами могут быть, например, пишущая машинка, телетайп, считыватель с перфокарт, перфолент, магнитных лент, карт или дисков, наборное поле (для ввода информации в аналоговый процессор) и т.п.
ЭВМ снабжена устройствами ввода информации: цифровой печатью, графопостроителем, регистратором на бумажную или магнитную ленту. Данные с ЭВМ поступают на звуковую или световую индикацию.
Выходными данными с ЭВМ, являются:
- величины расчетных параметров КУ.П.С., η, sA, σon, σor, qo;
- величины отступлений от допусков по каждому из указанных расчетных параметров;
- места наличия этих отступлений и места, где требуется устранить неисправности пути или ограничить скорость движения заданного типа экипажа;
- предельно допустимые скорости движения исследуемого типа экипажа по условию безопасности его движения по пути, имеющему неисправности в пределах контролируемого участка.
Математическая модель взаимодействия пути и исследуемого типа экипажа представляет собой систему дифференциальных уравнений, описывающих движение экипажа в вертикально-продольной плоскости, в направлении поперечных осей, а также поворота кузова и тележек относительно вертикальных и продольных осей.
Эти уравнения, в зависимости от моделирования вида движения элементов исследуемого экипажа в той или иной плоскости, связывают их линейные или угловые перемещения, параметры обрессоренных и необрессоренных элементов экипажа (их вес и массу, моменты инерции, величины жесткости надбуксового подвешивания, величины демпфирования, расстояние между кругами катания, конусность бандажей и радиус колеса, расстояния между буксовыми рессорами, устройствами демпфирования, базу тележки и кузова, возвышение центра тяжести надрессорного строения и обрессоренных масс тележки), параметры пути (его инерционные, упругие и диссипативные свойства), параметры рельсовой колеи (ширину колеи, положение пути в продольном профиле, в плане и по уровню), неровности рабочей поверхности катания рельсов (волнообразный износ, пробуксовины, выбоины, ступеньки в стыках, неровности боковой поверхности).
Решением системы дифференциальных уравнений при заданных начальных условиях, известных параметров исследуемого экипажа и контролируемого пути являются колебания подпрыгивания, галопирования, относа, боковой качки и влияния экипажа, а также перемещений пути.
Связь параметров, входящих в систему дифференциальных уравнений движения исследуемого экипажа, и порядок их решения (выполнения вычислительных операций) задают программным (для цифрового процессора ЭВМ) или схемным путем.
Учет скорости движения экипажа, для которой рассчитывают колебания элементов экипажа в пути, осуществляется соответствующими коэффициентами при членах, входящих в систему дифференциальных уравнений движения экипажа. Для членов уравнений со второй производной коэффициент равен отношению квадрата скорости, для которой вычисляют колебания элементов экипажа в пути, к квадрату скорости, при которой были выполнены измерения путеизмерительным вагоном.
Для членов уравнений с первой производной коэффициент равен отношению этих скоростей.
Для автоматизации решения системы дифференциальных уравнений заранее, т.е. до начала поездок, вводят априорные данные об исследуемом типе экипажа и пути контролируемого участка.
К априорной информации об экипаже относятся: вес и масса обрессоренных и необрессоренных элементов, моменты инерции обрессоренных масс тележки и кузова, поперечная, продольная, вертикальная жесткость надбуксового подвешивания и гасителей колебаний, вертикальное и горизонтальное демпфирование надбуксового и кузовного подвешивания, расстояние между кругами катания, конусность бандажей и радиус колеса, расстояния между буксовыми рессорами и устройствами демпфирования, база тележки и кузова, возвышение центра тяжести надрессорного строения и обрессоренных масс тележки, коэффициент демпфирования и жесткости в устройствах сцеплениях вагонов.
К априорной информации о пути относятся данные, о его инерционных, упругих и диссипативных свойствах.
Заранее задают скорость движения исследуемого экипажа, для которого выполняется расчет его взаимодействия с путем. При эксплуатации на такую скорость следует принимать скорость, установленную для контролируемого участка.
Переменными параметрами, которые вводят в систему расчета в процессе движения путеизмерительного вагона, являются: скорость его движения, вертикальная траектория центра каждого колеса исследуемого экипажа, ширина рельсовой колеи, положение пути по уровню и в плане, неровности на рабочей поверхности катания рельсов (волнообразный износ, пробуксовины, выбоины, ступеньки в стыках, неровности на боковой грани), модуль упругости подрельсового основания.
Вертикальные траектории центров колес зависят от конфигурации неровностей пути в вертикальной плоскости и с достаточной для практики точностью повторяют их. Измерив ординаты этих неровностей, можно получить вертикальную траекторию центра колеса исследуемого типа экипажа.
Измерение неровностей пути в вертикальной плоскости можно осуществлять различными известными способами и устройствами. Такими устройствами, например, являются устройства для измерений просадок пути на короткой базе (базе ходовой тележки), на длинной базе (базе вагона) или устройства, производящие измерение неровностей от абсолютной базы отсчета (например, создаваемой гироскопом). Известны устройства, позволяющие измерять ускорение вертикального перемещения буксового колеса путеизмерительного вагона по неровности и путем двойного интегрирования величины ускорения получать траекторию движения буксового узла колеса или даже центра колеса при учете соответствующим коэффициентом расположения буксового узла по отношению к его центру.
Для определения положения пути в плане, т.е. в горизонтальной плоскости, известны устройства измерения стрел изгиба или устройства, при помощи которых фиксируется угол, образованный осью ходовой тележки и рамой вагона. Известны устройства, позволяющие определить кривизну пути посредством вычисления отношения горизонтального ускорения буксы к квадрату скорости движения вагона.
Согласно изобретению более целесообразным является измерение просадок пути в вертикальной плоскости и неровностей пути в плане от абсолютной базы отсчета. В случае применения измерительных устройств с короткой базами, особенно, когда базы измерения меньше длин неровностей, необходимо данные измерения приводить к абсолютной базе отсчета.
Измерения ширины рельсовой колеи и положение пути по уровню выполняются известными устройствами, которыми снабжаются путеизмерительный вагоны. Измерение скорости движения путеизмерителя осуществляется также известными устройствами, например, посредством тахогенератора. Измерения поверхности рельса, а также модуля упругости подрельсового основания выполняются соответствующими устройствами, смонтированными на путеизмерителе.
Ввод измеряемых параметров от устройств путеизмерителя в ЭВМ осуществляется через интервалы времени, которые необходимы для выполнения всех вычислительных операций, связанных с решением алгебраических и дифференциальных уравнений для одного положения исследуемого экипажа на пути.
Так, например, если исследуемый экипаж занимает положение на пути согласно фиг.2, при котором в систему расчета вводят вертикальные неровности η11, η21, η12, η22, то к моменту ввода этих неровностей устройство путеизмерительного вагона должно зафиксировать ординату неровности η22 и запомнить с помощью соответствующего устройства ЭВМ ординаты η11, η21, η12, зафиксированные в предыдущие моменты измерения. То же самое можно сказать о горизонтальных неровностях У11, У21, У12, У22, величинах, характеризующих положение пути по уровню h11, h21, h12, h22 и ширине колеи s11, s21, s12, s22.
В качестве примера приведем связь параметров, входящих в систему дифференциальных уравнений, описывающих колебания подпрыгивания (1) и относа (2) исследуемого моторного электропоезда, имеющего двухступенчатое подвешивание.
 ,
,




j=1,2; i=1,2;
j - номер тележки,
i - номер колесной пары в j-й тележке.
В уравнениях (1) и (2) приняты следующие обозначения: перемещения кузова исследуемого экипажа поперек - λ, вдоль пути - χ, вертикально - Z, угловые повороты кузова относительно продольной оси - X, поперечной оси - φ, вертикальной оси - Ψ; перемещение и угловые повороты ходовых тележек - λT, ZT, φT, ψT, где:
Т=1,2 соответственно для первой и второй тележек, перемещение и поворот колесных пар - λKT, ZKT, ψKT;
ТК=1,2 соответствует номеру тележки и расположения колесной пары;
m1, m2 - соответственно масса кузова и тележки;
mл, mi - соответственно масса локомотива и масса вагона с номером i;
χл - перемещение локомотива относительно его центра масс в положении статического равновесия;
Fпрод.л(χл-χ1) - зависимость продольной силы от величины сжатия последовательно соединенных поглощающих аппаратов локомотива и первого вагона;
Fпрод.i(χi-χi+1) - зависимость продольной силы от величины сжатия последовательно соединенных межвагонных аппаратов;
Fпрод.1
 - зависимость продольной силы от относительной скорости локомотива и первого вагона;
- зависимость продольной силы от относительной скорости локомотива и первого вагона;
Fпрод.i
 - зависимость продольной силы от относительной скорости двух последовательно соединенных вагонов;
- зависимость продольной силы от относительной скорости двух последовательно соединенных вагонов;
βZK, βλT - соответственно вертикальное демпфирование в надбуксовом и кузовом подвешивании:
βλT - горизонтальное демпфирование перемещений тележки относительно кузова;
ЖZT, ЖλT - соответственно вертикальная и горизонтальная жесткость кузовного подвешивания;
ЖZK, ЖλK - соответственно вертикальная и поперечная жесткость надбуксового подвешивания;
Жn, ЖP - соответственно жесткость пути в вертикальной плоскости под колесом и рельса по головке;
Р - вес кузова (брутто);
РT - вес обрессоренной части тележки;
РM - вес колесной пары с буксами и неподрессоренными элементами
экипажной части;
РCT - статическая нагрузка на колесо;
σ - зазор в колее на сторону под колесной парой;
sK - расстояние между кругами катания;
hji - разность высот рельсовых нитей под соответствующими колесными парами;
ηji - ординаты вертикальных неровностей рельсовых нитей под соответствующими колесными парами;
2lT - база тележки;
2l -база кузова;
h - возвышение центра тяжести надрессорного строения над центром колебаний;
hT - возвышение центра тяжести обрессоренных масс тележки над плоскостью осей колесных пар;
уji - поперечное смещение колесной пары относительно средней линии рельсовой колеи;
V0 - скорость движения путеизмерительного вагона;
V1 - скорость движения исследуемого экипажа;
V - скорость относительного смещения поверхностей контакта для колесной пары тележки экипажа;
xji - коэффициент, являющийся линейной функцией относительной скорости проскальзывания:
i(yji)={0 для|yji|<σ, 1 для |yji|≥σ.
Коэффициент устойчивости поперечному сдвигу рельсовой решетки вычисляют по известной формуле,
 ,
,
где Yr - рамная сила,
Ps - статическая нагрузка от оси колесной пары на рельс.
Рамная сила определяется на основе решения дифференциальных уравнений поперечных колебаний исследуемого типа экипажа. Статическая нагрузка от оси рельс является постоянной для исследуемого типа экипажа и принимается равной общему весу экипажа, деленному на число его колес. Статическая нагрузка является априорной информацией.
Коэффициент безопасности по вползанию гребня колеса на рельс вычисляют по известной формуле:
 ,
,
В этих выражениях приняты следующие обозначения:
Р1 - вертикальная нагрузка, передаваемая на шейку колесной пары со стороны набегающего на рельс колеса;
Рr - вертикальная нагрузка на другую шейку той же колесной пары;
Р и R - соответственно радиусы шейки колесной пары и колеса;
S - расстояние от точки контакта гребня колеса с рельсом до круга катания;
μ=tgφ - коэффициент трения скольжения гребня по рельсу;
β - угол между образующей поверхности гребня и горизонтальной плоскостью;
b1, b2 - расстояния от точки контакта гребня колеса с рельсов соответственно до сил Р1 и Р2;
J1 - вертикальная сила инерции колеса, набегающего на рельс;
J2 - вертикальная сила инерции другого колеса той же колесной пары;
j - горизонтальное ускорение набегающей колесной пары;
G - вес колесной пары;
g - ускорение силы тяжести;
Yr - рамная сила.
Величина P1, Рr, J1, J2 и j являются переменными для каждого момента движения исследуемого типа экипажа.
Величины Р1 и Р2 определяются на основе решения дифференциальных уравнений, описывающих колебания исследуемого экипажа в вертикальной плоскости.
Величины J1, J2 и j могут определяться либо на основе решения дифференциальных уравнений, характеризующих взаимодействие необрессоренных масс исследуемого экипажа с рельсом, либо по известным формулам.
Динамическую ширину рельсовой колеи SA, вызванную боковым отжатием рельса при движении исследуемого типа экипажа на заданной скорости, определяют на основе решения дифференциальных уравнений поперечных колебаний исследуемого экипажа.
Вертикальная сила, передаваемая от колеса исследуемого типа экипажа рельсу, определяется как совокупность вертикальных динамических сил, возникающих при движении экипажа, и статической нагрузке PS.
В совокупность вертикальных динамических сил входят силы, вызванные колебанием исследуемого экипажа на рессорах (РР), длинными (РКП) неровностями пути, силы инерции необрессоренных масс, вызванных изолированными плавными (РИНК) или непрерывными (РННК) неровностями на колесе.
Вертикальную силу, передаваемую от колеса рельсу, можно определить по формуле:
- при коротких неровностях пути
 ,
,
или при длинных неровностях пути
 .
.
В этих формулах вероятность влияния сил, вызванных непрерывной и изолированной неровностями на колесе, оценивается средними квадратическими отклонениями SИНК и SННК. Коэффициентами К2 и К3 соответственно учитывается удельный вес колес, имеющих изолированные и непрерывные неровности. Величины коэффициентов К2 и К3 определяются на основе промеров колес исследуемых типов экипажей. Они задаются заранее.
Величины средний квадратических отклонений SИНК и SHHK определяют по известным формулам. Они являются априорной информацией.
Величины РР и РК или РНП определяют расчетным путем при движении путеизмерителя, a PS - задают.
Боковое давление Y| колеса на рельс и направляющее усилие колеса Y определяют посредством решения дифференциальных уравнений поперечных колебаний исследуемого экипажа.
Основные напряжения, т.е. напряжения, вызванные изгибом и кручением рельса, в кромках подошвы σon и головке σor вычисляют по расчетным вертикальным давлениям колес ΣР, передаваемым рельсам, с учетом расстояния x1, от местонахождения колеса ходовой тележки исследуемого экипажа до сечения, в котором определяются σon, σor, а также по данным, характеризующим конструкцию контролируемого пути и его элементов. К их числу относятся коэффициент относительной жесткости пути и рельса К, момент сопротивления рельса W, модуль упругости подрельсового основания U.
Информация о величинах ΣР и модуле упругости U является текущей, а о величинах Xi, Wi - априорной. Величина К определяется расчетным путем.
Поскольку величины W, K, U зависят от конкретной конструкции верхнего строения пути, то все разновидности этих конструкций на контролируемом участке пути задаются. Величина W задается с учетом вертикального износа рельса.
Контактные напряжения q0 определяют в прямых участках, исходя из данных о действии динамических вертикальных сил, приложенных к рельсу, и вызванных короткими неровностями на рельсе, РH, а в кривых участках, исходя из данных о действии направляющих колес Y.
Указанные данные составляют текущую информацию. Для расчета величин q0 используется также априорная информация.
Операция сравнения основана на логико-арифметическом анализе величин рассчитанных параметров с заданными допусками.
Сравнению подлежат:
- коэффициент устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С.:
КУ.П.С.≤[КУ.П.С];
- коэффициент безопасности по вползанию гребня колеса на рельс
η>1;
- динамическая ширина рельсовой колеи
SA<[Smax];
- основные напряжения в кромках подошвы и головки рельса
σon<[σon], σor<[σor];
- контактные напряжения в рельсах
qo<[qo].
Допуски [КУ.П.С.], [Smax], [σon], [σor], [qo] являются априорной информацией. Последнее также относится и к коэффициенту безопасности η. В принятых обозначениях [Smax] является предельной величиной ширины колеи.
В результате операции сравнения вычисляют величины отступлений от принятых допусков по каждому сравниваемому параметру. Величина отступления представляет собой разность фактической (рассчитанной) и допустимой величин.
Поскольку в каждом расчетном сечении пути осуществляется привязка к его протяженности посредством датчика пройденного пути, то координаты месторасположения отступлений сравниваемых параметров от допусков запоминают. Координаты месторасположения отступлений характеризуют места, где требуется устранить неисправности пути или ограничить скорость движения исследуемого типа экипажа по сравнению с заданной для расчета.
Операция определения предельно возможной скорости движения выполняется для тех мест на пути, где имеются отступления рассчитанных параметров КУ.П.С., Smax, σon, σor, qo от допусков при наличии неисправности пути.
Выполнение операции осуществляется путем вычислений. Алгоритмы этих вычислений могут быть различными. Назовем два из них. Согласно первому варианту выполняются расчеты, как это было указано выше, для различных заданных скоростей движения исследуемого типа экипажа и сравнивают полученные величины расчетных параметров с допустимыми. Выбирают ту скорость движения, которая имеет наименьшее отклонение от установленной для контролируемого участка и при которой величины расчетных параметров укладываются в допуски.
Во втором случае математические зависимости по определению параметров КУ.П.С., Smax, σon, σor, qo дополняют ограничениями, выражающими допуски на эти параметры. Систему уравнений с заданными ограничениями решают совместно относительно искомой скорости движений. При этом можно задать критерий оптимальности, например, характеризующий минимальное уклонение от скорости, установленной для контролируемого участка.
Способ оценки состояния пути заключается в следующем. В какой-то момент времени ti устройства измерения параметров пути путеизмерения параметров пути путеизмерительного вагона находятся в точках с координатами пути (фиг.3)  и
и  . Факт нахождения устройств измерения над указанными координатами фиксируется датчиком пути, который подает команду на автоматическое измерение параметров положения рельсовой колеи: просадок нагруженной левой и правой рельсовых нитей ηЛ(П), положение пути по уровню h, положение пути в плане каждой ненагруженной рельсовой нити yЛ(П) и ширины рельсовой колеи S; параметров неровности рабочей поверхности каждого рельса - волнообразного износа, пробуксовин, выбоин, ступенек в стыках, неровностей на боковой грани, ПЛ(П), модуля упругости подрельсового основания ИЛ(П).
. Факт нахождения устройств измерения над указанными координатами фиксируется датчиком пути, который подает команду на автоматическое измерение параметров положения рельсовой колеи: просадок нагруженной левой и правой рельсовых нитей ηЛ(П), положение пути по уровню h, положение пути в плане каждой ненагруженной рельсовой нити yЛ(П) и ширины рельсовой колеи S; параметров неровности рабочей поверхности каждого рельса - волнообразного износа, пробуксовин, выбоин, ступенек в стыках, неровностей на боковой грани, ПЛ(П), модуля упругости подрельсового основания ИЛ(П).
В этот же момент времени по команде от датчика пути измеряется посредством соответствующего датчика фактическая скорость V0. Значения каждого из измеряемых параметров представляются в виде пропорционального электрического сигнала. Измеренные данные в точке I поступают непосредственно на входы ЭВМ или через преобразовательные устройства, обеспечивающие сопряжения вводов ЭВМ с измерительными устройствами. Одновременно по команде от датчика пути эти данные поступают в специальную память ЭВМ с целью хранения для последующих циклов оценки состояния пути.
По команде от датчика пути на памяти ЭВМ вызывается значение ПЛ(П), УЛ(П) и S, ранее измеренные в точке i, а также все ранее измеренные параметры: ИЛ(П), ηЛ(П), h, ПЛ(П), ) УЛ(П), S, в точках
 ,
,  ,
, .
.
Значения этих параметров поступают в процессор ЭВМ.
По этой же команде от датчика пути с устройств ввода в ЭВМ поступает априорная информация. Объем и номенклатура априорной информации определяются типом исследуемого экипажа и типом конструкции пути оцениваемого участка. Априорная информация задается до начала текущего цикла оценки. Математическая модель взаимодействия исследуемого типа экипажа и пути на заданной скорости движения задается до начала всех циклов оценки, т.е. до начала контрольной поездки путеизмерителя.
После ввода всех исходных данных посредством ЭВМ решают систему алгебраических и дифференциальных уравнений, связывающих эти данные, и определяют перемещения элементов системы экипаж-путь, напряжения в элементах пути и их изменения во времени. Путем вычислений определяют также рамные силы, передаваемые каждой колесной парой раме тележки каждой колесной пары по левому и правому колесу J1, J2, вертикальные нагрузки, передаваемые на шейки каждой колесной пары P1, Р2, вертикальные Р и горизонтальные Y| силы, передаваемые рельсу от каждого колеса, а также направляющие усилия каждого колеса Y. На основе этих данных затем определяют коэффициент устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С. под каждой колесной парой, коэффициент безопасности по вползанию гребня колеса на рельс η, динамическую ширину рельсовой нити SA под каждой колесной парой, основные напряжения в кромках подошвы σon и головки σor рельса под каждым колесом, тензор контактных напряжений qo под каждым колесом, продольные силы, обусловленные угоном пути, F.
Затем расчетные параметры КУ.П.С., η, σon, σor, и qo сравнивают с допусками и определяют величины отступлений от допусков. Эти операции выполняют также посредством ЭВМ. Те места, где обнаружились отступления от допусков, фиксируются ЭВМ. Места наличия отступлений указывают на то, что здесь требуется устранить неисправности пути или ограничить скорость движения поездов. После этого посредством ЭВМ определяют предельную возможную скорость для тех мест на пути, где имеются вышеуказанные отступления. Если расчетные параметры находятся в пределах допусков, то операция по определению предельно возможной скорости не выполняется.
Данные о параметрах КУ.П.С., η, σon, σor, qo, величинах отступлений их от допусков, предельно возможной скорости, а также данные об измеряемых параметрах положения рельсовой колеи, неровностей на рабочей поверхности рельсов и модуле упругости подрельсового основания выдают на печать и регистрацию с привязкой к протяженности пути. На этом один цикл оценки состояния пути заканчивается. При наезде измерительной колесной пары в момент времени ti+l на точку пути с координатой i+1 начинается второй цикл оценки состояния пути. На втором цикле координатами измеряемых параметров являются:
i+1,  ,
,  (Фиг.4).
(Фиг.4).
В расчетную схему их информационного поля
вводят измеряемые параметры с координатами:
i+1,  ,
,  ,
,  (Фиг.2)
(Фиг.2)
и затем начинают вычислительные операции.
При наезде на точку с координатами i+2 начинается третий цикл и т.д.
Источники информации
1. Способ контроля и измерения параметров положения рельсовых нитей: патент 80932, ГДР, МКИ. 19а 29/38. опубл. 1970.
2. Оценка пути с помощью ЭВМ, 1971, № 10, с.28.
3. Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (ЭВМ) и измерительных устройств, смонтированных в путеизмерительном вагоне: патент 618476, СССР, опубл. 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ С ИЗОЛИРУЮЩИМ СТЫКОМ | 2014 |
|
RU2567495C1 |
| Способ оценки напряженно-деформированного состояния пути | 2017 |
|
RU2659365C1 |
| Способ оценки динамической жёсткости рельсового пути и устройство для его реализации | 2019 |
|
RU2731163C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ БОКОВЫХ (ПОПЕРЕЧНЫХ) ЖЕСТКОСТЕЙ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2291804C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ ВЕРТИКАЛЬНЫХ ЖЕСТКОСТЕЙ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2291803C2 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ ЖЕСТКОСТИ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2240244C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
Изобретение предназначено для контроля и оценки состояния рельсовых путей. Способ оценки состояния железнодорожного пути заключается в том, что в процессе движения вагона при определенной скорости измеряют положение рельсовых нитей, положение пути по уровню и в плане, ширину рельсовой колеи. Перед поездкой закладывают в ЭВМ математическую модель взаимодействия оцениваемого пути и экипажа при требуемой скорости его движения, одновременно с параметрами положения рельсовой колеи измеряют неровности на рабочей поверхности рельса, модуль упругости подрельсового основания и коэффициенты демпфирования и жесткости в сцеплениях вагонов. В процессе движения вагона посредством решения системы алгебраических и дифференциальных уравнений математической модели, описывающей взаимодействие экипажа и железнодорожного пути, вычисляют коэффициент устойчивости рельсошпальной решетки поперечному сдвигу, коэффициент безопасности по вползанию гребня колеса на рельс, динамическую ширину рельсовой колеи, основные напряжения в кромках подошвы и головки рельса, тензор контактных напряжений рельса, продольные силы, обусловленные угоном пути, сопоставляют эти величины с допусками. Достигается получение более достоверных данных о состоянии железнодорожного пути. 8 ил.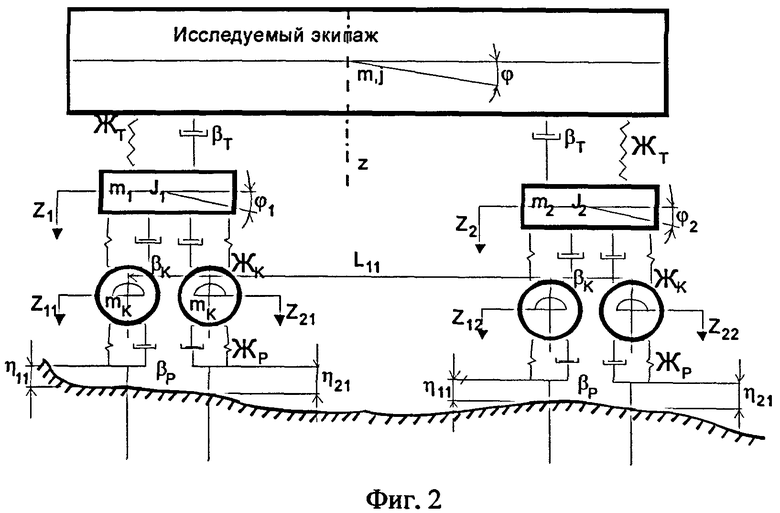
Способ оценки состояния железнодорожного пути, заключающийся в том, что в процессе движения вагона при определенной скорости измеряют положение рельсовых нитей, положение пути по уровню и в плане, ширину рельсовой колеи, электрические сигналы, пропорциональные величинам измеряемых параметров, подают на ЭВМ, предварительно в ЭВМ вводят допуски по каждому параметру, посредством ЭВМ сравнивают величины каждого измеряемого параметра с допустимыми, определяют отступления измеренных величин от допусков и затем для заданной длины контролируемого участка пути подсчитывают их количество, отличающийся тем, что перед поездкой закладывают в ЭВМ математическую модель взаимодействия оцениваемого пути и экипажа при требуемой скорости его движения, одновременно с параметрами положения рельсовой колеи измеряют неровности на рабочей поверхности рельса, модуль упругости подрельсового основания и коэффициенты демпфирования и жесткости в сцеплениях вагонов, по введенным в ЭВМ величинам решают систему алгебраических и дифференциальных уравнений упомянутой математической модели, определяют перемещения элементов системы экипаж - путь, напряжения в элементах пути и их изменения во времени, рамные силы Yr, силы инерции колесной пары J1, J2, вертикальные нагрузки, передаваемые на шейки колесных пар P1, P2, вертикальную Р и горизонтальную Y' силы от колеса на рельс, а также направляющее усилие Y, по полученным данным вычисляют коэффициент устойчивости рельсошпальной решетки поперечному сдвигу КУ.П.С, коэффициент безопасности по вползанию гребня колеса на рельс η, динамическую ширину рельсовой колеи SA, основные напряжения в кромках подошвы σon и головки σor рельса, тензор контактных напряжений рельса qo, продольные силы, обусловленные угоном пути, F, величины параметров КУ.П.С., η, SA, ηon, σor, qo от допусков, выводят эти данные и данные об отступлениях рассчитанных параметров, а также измеряемых параметров на регистрацию и печать с привязкой к протяженности пути.
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ ПОЛОЖЕНИЯ ПУТИ | 2005 |
|
RU2293154C1 |
| DE 102006042802 A1, 20.09.2007. | |||

