(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод бурового станка | 1987 |
|
SU1515310A1 |
| Электропривод бурового станка | 1989 |
|
SU1695473A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1990 |
|
RU2109396C1 |
Изобретение относится к электротехнике и может быть ибпользовано в буровых станках, крановых и строительных механизмах. Целью изобретения является повышение надежности и производительности. Автоматизированный электропривод содержит электродвигатель 1,подключенный к реверсивному тиристорному преобразователю 2. К входам системы 6 управления подключены датчики 7и8 напряжения и тока. В данном устройстве исключаются дребезг тормозных колодок, удары и перегрузки за счет введения в блок 12 управления тормозом компараторов 13 и 14 и логического элемента 17 временной задержки. 2 ил.
Изобретение относится к электротехнике и может быть использовано в буровых станках, крановых и строительных механизмах.
Целью изобретения является повышение надежности и производительности.
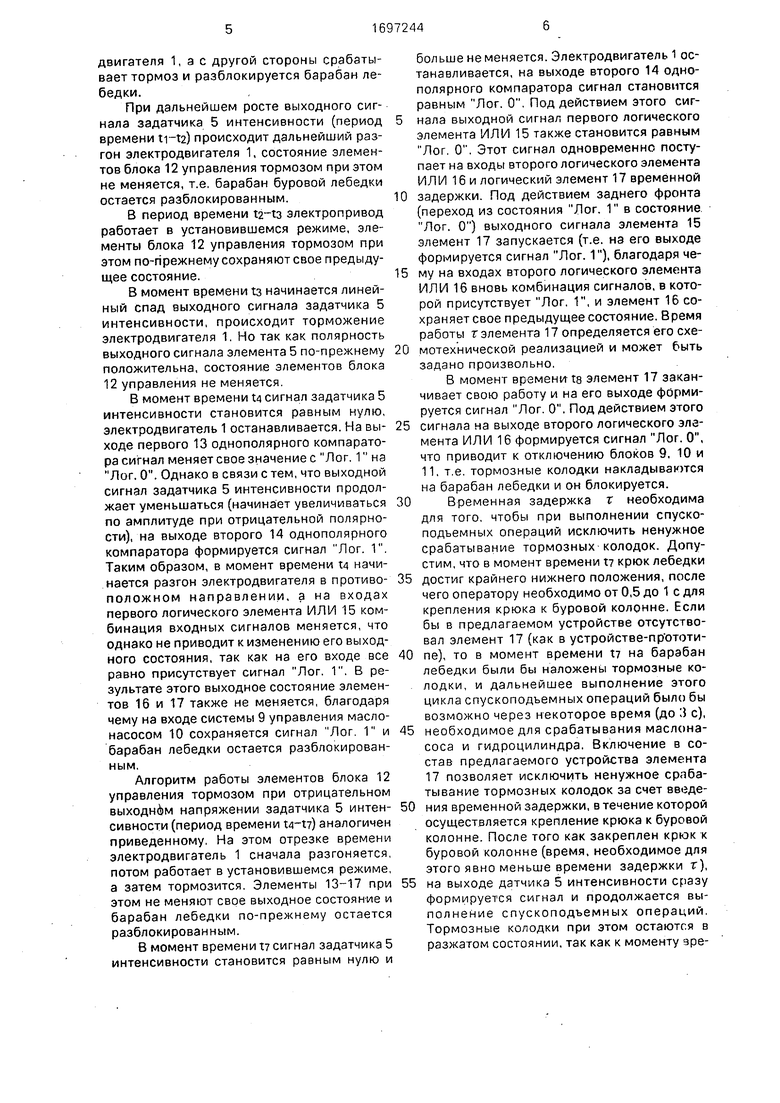
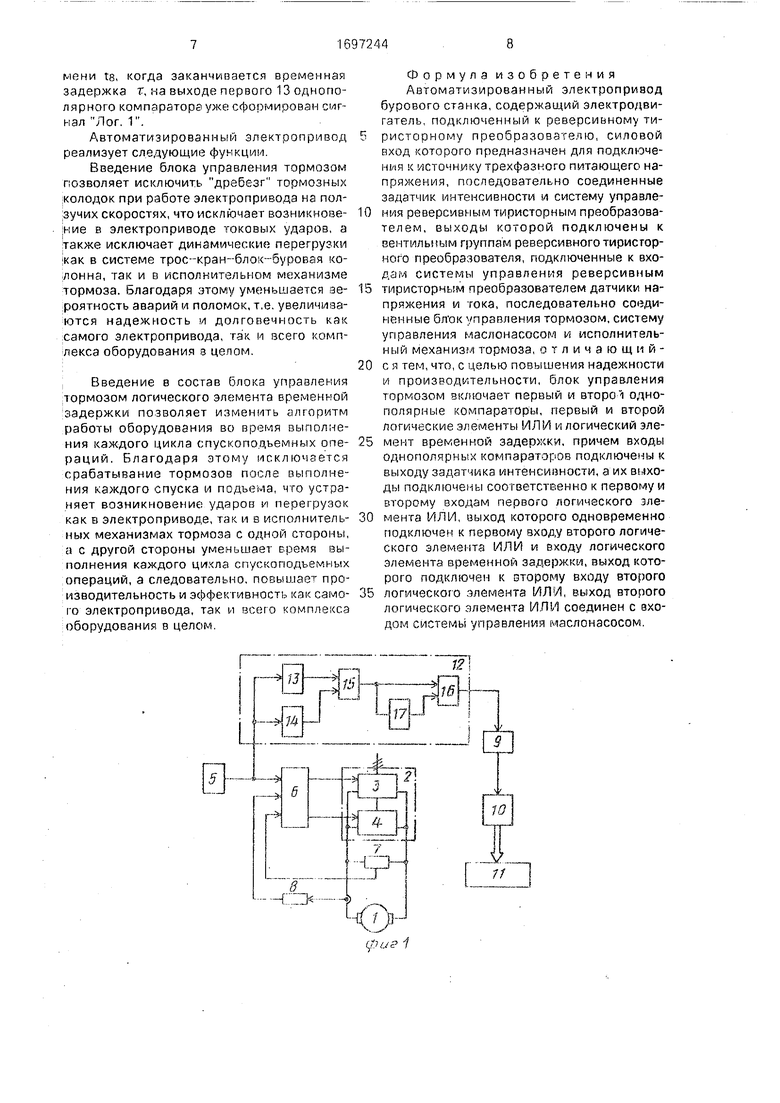
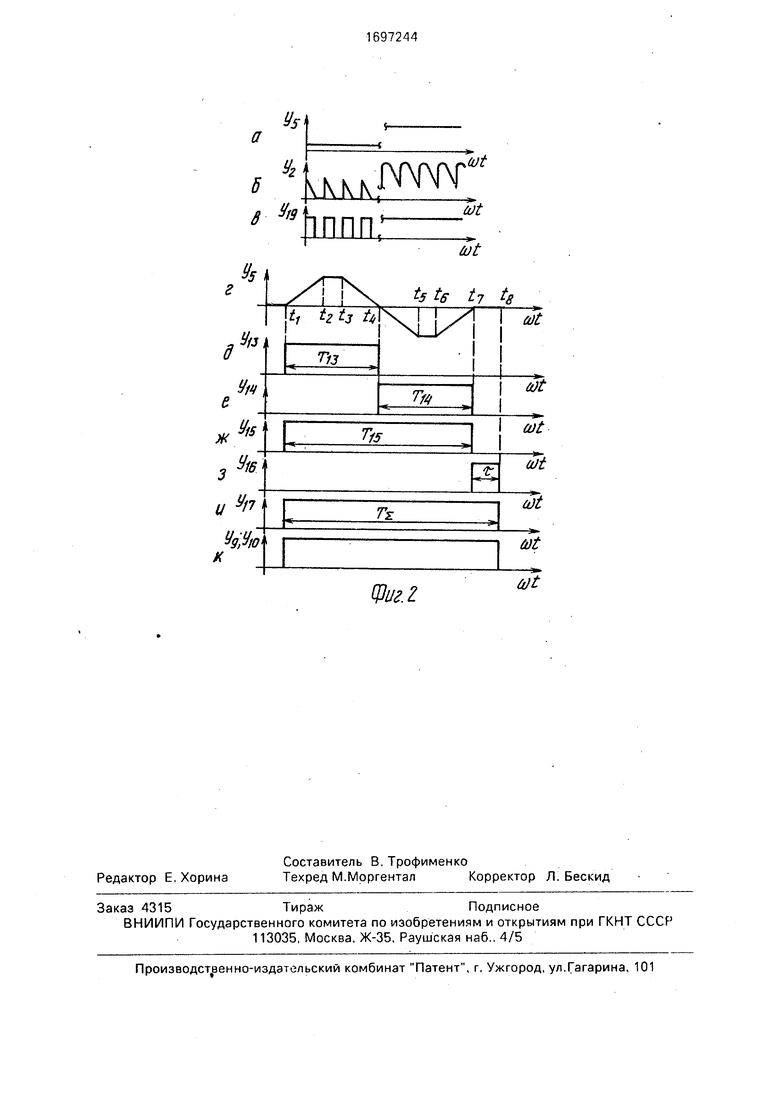
На фиг. 1 приведена схема автоматизированного электропривода бурового станка; на фиг. 2 приведены диаграммы работы электропривода.
Автоматизированный электропривод бурового станка содержит электродвигатель 1, подключенный к реверсивному тиристор- ному преобразователю 2 с вентильными группами Вперед 3 и Назад 4, на вход которого подключено трехфазное питающее напряжение, последовательно соединенные задатчик 5 интенсивности и система 6 управления реверсивным тиристорным преобразователем 2, выходы которой подключены к вентильным группам 3 и 4 реверсивного тиристорного преобразователя 2, подключенные к входам системы 6 управления датчики напряжения 7 и тока 8, система 9 управления маслонасосом 10, исполнительный механизм 11 тормоза, блок 12 управления тормозом, состоящий из первого 13 и второго 14 однополярных компараторов, первого 15 и второго 16 логических элементов ИЛИ и логического элемента 17 временной задержки. При этом входы однополярных компараторов 13 и 14 одновременно подключены к входу задатчика 5 интенсивности, а их выходы подключены на первый и второй входы первого логического элемента ИЛИ 15, выход которого одновременно подключен к первому входу второго логического элемента ИЛИ 16 и входу логического элемента 17 временной задержки, выход которого подключен к второму входу второго логического элемента ИЛИ 16, выход которого соединен с
О
ю
Р
Јь
входом системы 9 управления маслонасо- сом 10.
Задатчик 5 интенсивности имеет передаточную функцию W 1/Тр с ограничением уровней.
Система 6 управления реверсивным ти- ристорным преобразователем 2 предназначена для сравнения сигнала задания, поступающего от задатчика 5 интенсивности, с сигналами обратной связи, поступаю- щими от датчиков напряжения 7 и тока 8, стабилизации заданного уровня выходного напряжения вентильных групп 3 и 4, преобразования аналогового сигнала в управляющие импульсы и их фазового сдвига пропорционально сигналу задания задатчика 5 интенсивности, подачи управляющих импульсов на вентильную группу 3 или 4 в зависимости от полярности и уровня сигнала задания эадатчика 5 интенсивности, а также режимов работы и нагрузки на валу электродвигателя 1, причем управляющие импульсы не могут быть одновременно поданы на обе вентильные группы.
Система 9 управления маслонасосом выполнена на релейно-контакторных элементах и предназначена для преобразования аналогового сигнала с выхода блока 12 управления тормозом в переменное напряжение, подаваемое на маслонасос 10.
Маслонасос 10 может содержать гидронасос с приводным асинхронным двигателем переменного тока с короткозамкнутым ротором, функционально при поступлении переменного напряжения от системы уп- равления 9 маслонасос производит подачу масла в гидроцилиндр, входящий в состав исполнительного механизма 11 тормоза.
Исполнительный механизм 11 тормоза представляет собой комплекс механических и гидравлических приспособлений, которые при включении маслонасоса 10 производят растормаж ивание буровой колонны.
Электропривод работает следующим образом.
Задатчик 5 интенсивности формирует линей«о нарастающее (спадающее) напряжение, которое определяет темп разгона (торможения) электродвигателя 1.
Система 6 управления реверсивным ти- ристорным преобразователем 2 обеспечивает преобразование аналогового сигнала задатчика 5 в управляющие импульсы и их фазовый сдвиг по мере увеличения сигнала задания (пропорционально сигналу за- дания), Эти управляющие импульсы системой 6 управления подаются на одну из вентильных групп (например, на вентильную группу 3). Номер группы, на которую подаются управляющие импульсы,
определяется полярностью выходного сигнала задатчика 5. По мере увеличения выходного напряжения вентильной группы 3 системой управления осуществляется сравнение выходного сигнала датчика 7 напряжения и сигнала задатчика 5 интенсивности, за счет чего обеспечивается стабилизация выходного напряжения вентильной группы на заданном уровне. Управляющие импульсы могут подаваться системой 6 управления только на одну вентильную группу.
При смене полярности выходного сигнала задатчика 5 интенсивности электропривод работает аналогичным образом, только управляющие импульсы подаются на другую (например, на 4-ю) вентильную группу.
Рассмотрим момент времени ti, когда на выходе задатчика 5 интенсивности начал формироваться положительный нарастающий сигнал YS (фиг. 2). Выходной сигнал задатчика 5 интенсивности одновременно поступает на входы системы 6 управления реверсивным тиристорным преобразователем и блока 12 управления тормозом, Под действием этого сигнала электродвигатель 1 начинает разгоняться. В то же самое время положительный нарастающий сигнал попадает на входы однополярных компараторов 13 и 14, Под действием этого сигнала в момент времени ti на выходе элемента 13 формируется сигнал Лог, 1, а на выходе элемента 14 сохраняется Лог О. Выходные сигналы однополярных компараторов поступают на входы первого логического элемента ИЛИ 15, и в момент времени ti на его выходе также формируется сигнал Лог. 1. Этот сигнал одновременно поступает на вход второго логического элемента ИЛИ 16 и логического элемента 17 временной задержки. Однако появление на элемента 17 Лог, 1 не приводит к изменению его выходного состояния, которое сохраняется на уровне Лог. О Таким образом, на входах второго логического элемента ИЛИ 16 появляется комбинация входных сигналов из Лог. 1 и Лог. О. Это приводит к тому, что в момент времени ti на выходе элемента 16 также формируется сигнал Лог. 1, который поступает на вход системы 9 управления маслонасосом 10. В результате маслонасос 10 включается и происходит нагнетание масла в исполнительный механизм 11 тормоза, что приводит к разжатию тормозных колодок барабана лебедки, т.е. тормоз срабатывает.
Таким образом, в момент времени ц с одной стороны начинается разгон электродвигателя 1, а с другой стороны срабатывает тормоз и разблокируется барабан лебедки.
При дальнейшем росте выходного сигнала задатчика 5 интенсивности (период времени ti-ta) происходит дальнейший разгон электродвигателя 1, состояние элементов блока 12 управления тормозом при этом не меняется, т.е. барабан буровой лебедки остается разблокированным.
В период времени электропривод работает в установившемся режиме, элементы блока 12 управления тормозом при этом по-прежнему сохраняют свое предыдущее состояние.
В момент времени т.з начинается линейный спад выходного сигнала задатчика 5 интенсивности, происходит торможение электродвигателя 1. Но так как полярность выходного сигнала элемента 5 по-прежнему положительна, состояние элементов блока 12 управления не меняется.
В момент времени t4 сигнал задатчика 5 интенсивности становится равным нулю, электродвигатель 1 останавливается. На выходе первого 13 однополярного компаратора сигнал меняет свое значение с Лог. 1 на Лог. О. Однако в связи с тем, что выходной сигнал задатчика 5 интенсивности продолжает уменьшаться (начинает увеличиваться по амплитуде при отрицательной полярности), на выходе второго 14 однополярного компаратора формируется сигнал Лог. 1. Таким образом, в момент времени t4 начинается разгон электродвигателя в противоположном направлении, а на входах первого логического элемента ИЛИ 15 комбинация входных сигналов меняется, что однако не приводит к изменению его выходного состояния, так как на его входе все равно присутствует сигнал Лог. 1. В результате этого выходное состояние элементов 16 и 17 также не меняется, благодаря чему на входе системы 9 управления масло- насосом 10 сохраняется сигнал Лог. 1 и барабан лебедки остается разблокированным.
Алгоритм работы элементов блока 12 управления тормозом при отрицательном выходном напряжении задатчика 5 интенсивности (период времени ) аналогичен приведенному. На этом отрезке времени электродвигатель 1 сначала разгоняется, потом работает в установившемся режиме, а затем тормозится. Элементы 13-17 при этом не меняют свое выходное состояние и барабан лебедки по-прежнему остается разблокированным.
В момент времени t сигнал задатчика 5 интенсивности становится равным нулю и
больше не меняется. Электродвигатель 1 останавливается, на выходе второго 14 одно- полярного компаратора сигнал становится равным Лог. О. Под действием этого сигнала выходной сигнал первого логического элемента ИЛИ 15 также становится равным Лог. О. Этот сигнал одновременно поступает на входы второго логического элемента ИЛИ 16 и логический элемент 17 временной
задержки. Под действием заднего фронта (переход из состояния Лог. 1 в состояние Лог. О) выходного сигнала элемента 15 элемент 17 запускается (т.е. на его выходе формируется сигнал Лог. 1), благодаря чему на входах второго логического элемента ИЛИ 16 вновь комбинация сигналов, в которой присутствует Лог. 1, и элемент 16 сохраняет свое предыдущее состояние. Время работы тэлемента 17 определяется его схемотехнической реализацией и может быть задано произвольно.
В момент времени те элемент 17 заканчивает свою работу и на его выходе формируется сигнал Лог. О. Под действием этого
сигнала на выходе второго логического элемента ИЛИ 16 формируется сигнал Лог. О, что приводит к отключению блоков 9, 10 и 11, т.е. тормозные колодки накладываются на барабан лебедки и он блокируется.
Временная задержка г необходима для того, чтобы при выполнении спуско- подъемных операций исключить ненужное срабатывание тормозных колодок. Допустим, что в момент времени t крюк лебедки
достиг крайнего нижнего положения, после чего оператору необходимо от 0,5 до 1 с для крепления крюка к буровой колонне. Если бы в предлагаемом устройстве отсутствовал элемент 17 (как в устройстве-пр ототипе), то в момент времени t на барабан лебедки были бы наложены тормозные колодки, и дальнейшее выполнение этого цикла спускоподъемных операций было бы возможно через некоторое время (до 3 с),
необходимое для срабатывания маслона- соса и гидроцилиндра. Включение в состав предлагаемого устройства элемента 17 позволяет исключить ненужное срабатывание тормозных колодок за счет введения временной задержки, в течение которой осуществляется крепление крюка к буровой колонне. После того как закреплен крюк к буровой колонне (время, необходимое для этого явно меньше времени задержки г),
на выходе датчика 5 интенсивности сразу формируется сигнал и продолжается выполнение спускоподъемных операций. Тормозные колодки при этом остаются в разжатом состоянии, так как к моменту эремени ts, когда заканчивается временная задержка г, на выходе первого 13 однопо- лярного компаратора уже сформирован сигнал Лог. 1.
Автоматизированный электропривод реализует следующие функции.
Введение блока управления тормозом позволяет исключить дребезг тормозных колодок при работе электропривода на ползучих скоростях, что исключает возникновение в электроприводе токовых ударов, а также исключает динамические перегрузки как в системе трос-кран-блок-буровая колонна, так и в исполнительном механизме тормоза. Благодаря этому уменьшается вероятность аварий и поломок, т.е. увеличиваются надежность и долговечность как самого электропривода, так и всего комплекса оборудования в целом.
Введение в состав блока управления тормозом логического элемента временной задержки позволяет изменить алгоритм работы оборудования во время выполнения каждого цикла спускоподьемных операций. Благодаря этому исключается срабатывание тормозов после выполнения каждого спуска и подъема, что устраняет возникновение ударов и перегрузок как в электроприводе,так и в исполнительных механизмах тормоза с одной стороны, а с другой стороны уменьшает время выполнения каждого цикла спускоподъемных операций, а следовательно, повышает производительность и эффективность как самого электропривода, так и всего комплекса оборудования в целом.
Формула изобретения Автоматизированный электропривод бурового станка, содержащий электродвигатель, подключенный к реверсивному тиристорному преобразователю, силовой вход которого предназначен для подключения к источнику трехфазного питающего напряжения, последовательно соединенные задатчик интенсивности и систему управления реверсивным тиристорным преобразова- телем, выходы которой подключены к вентильным группам реверсивноготиристор- ного преобразователя, подключенные к входам системы управления реверсивным
тиристорчым преобразователем датчики напряжения и тока, последовательно соединенные бл ок управления тормозом, систему управления маслонасосом и исполнительный механизм тормоза, отличающийс я тем, что, с целью повышения надежности и производительности, блок управления тормозом включает первый и второ 1 одно- полярные компараторы, первый и второй логические элементы ИЛИ и логический элемент временной задержки, причем входы однополярных компараторов подключены к выходу задатчика интенсивности, а их выходы подключены соответственно к первому и второму входам первого логического элемента ИЛИ, выход которого одновременно подключен к первому входу второго логического элемента ИЛИ и входу логического элемента временной задержки, выход которого подключен к второму входу второго
логического элемента ИЛИ, выход второго логического элемента ИЛИ соединен с ахо- дом системы управления маслонасосом.
фиг 1
а
У$
У,(
У
шппг
м
м
Фиг. г
at
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Техническое описание и руководство по эксплуатации ИЖКМ | |||
| Способ получения твердых неплавких и нерастворимых продуктов уплотнения формальдегида с фонолами | 1925 |
|
SU435A1 |
