Изобретение относится к горному делу и может быть использовано в конструкции механизированной крепи.
Цель изобретения - повышение адаптации механизированной крепи к условиям нагружения.
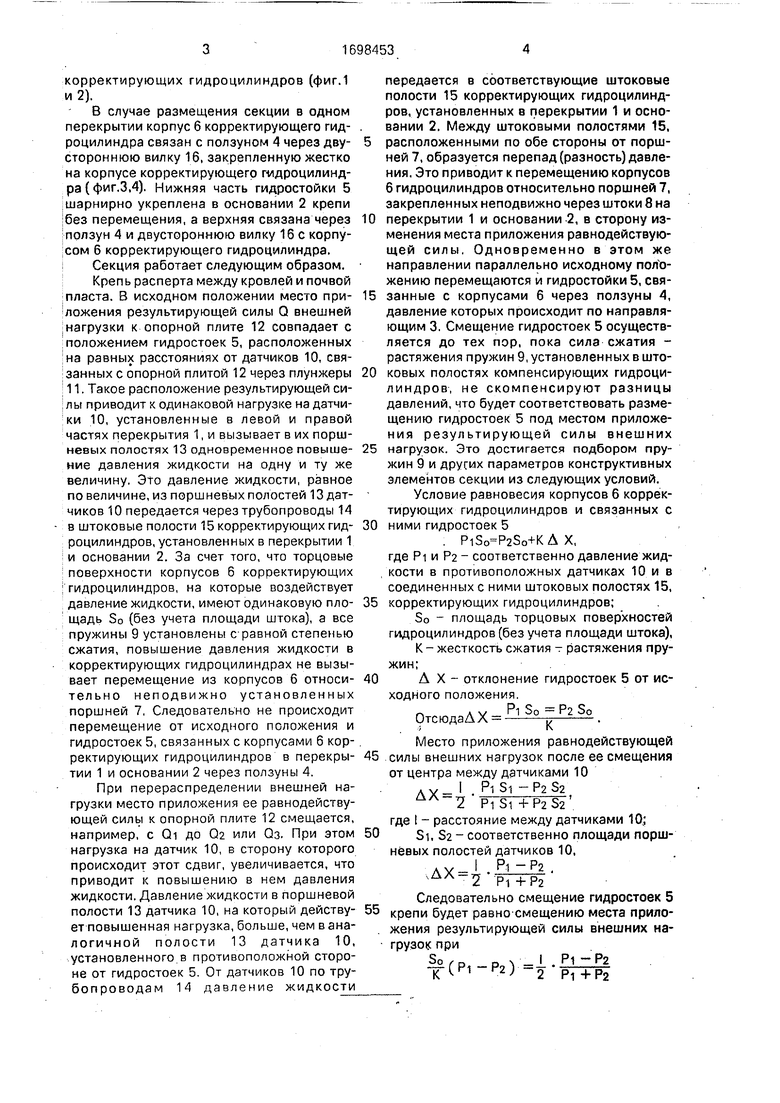
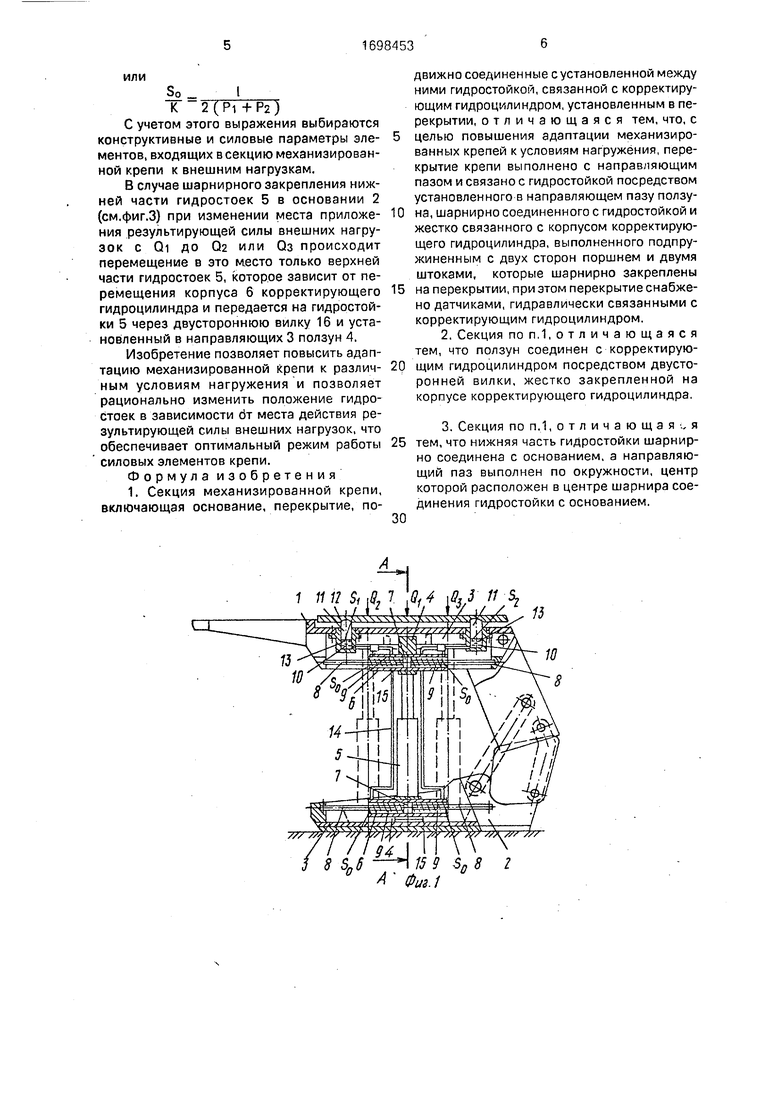
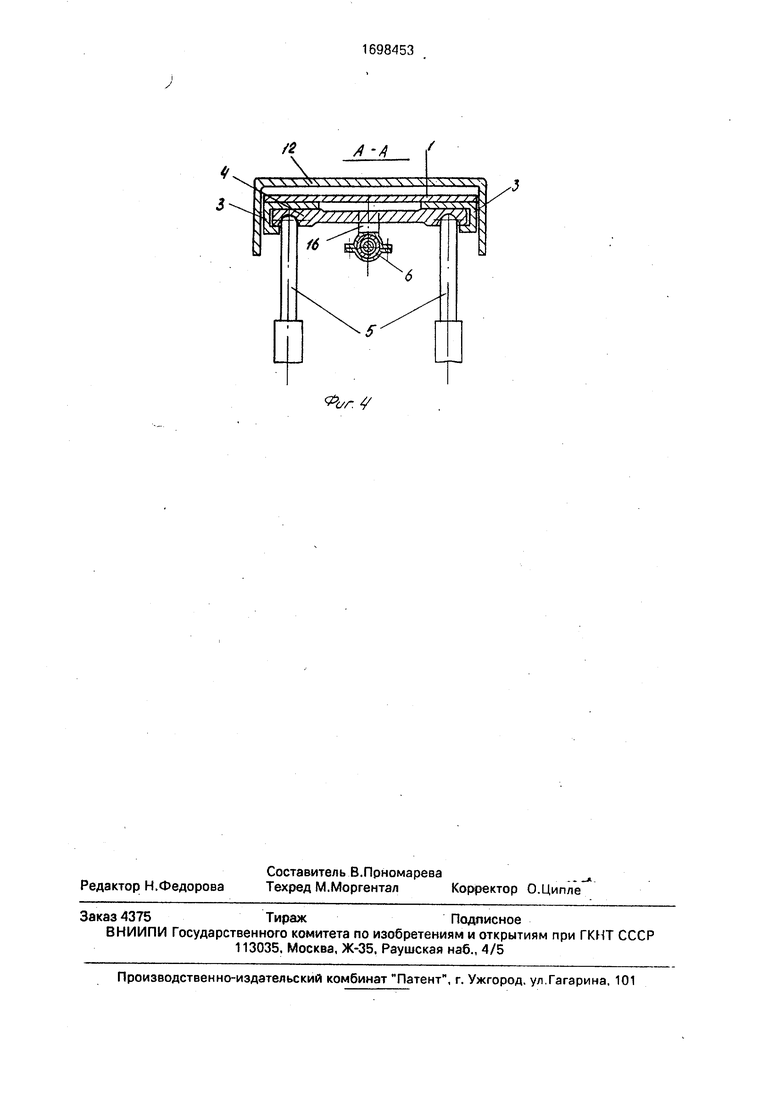
На фиг.1 приведена схема секции механизированной крепи с возможностью перемещения силовых элементов относительно перекрытия и основания;хна фиг.2 - сечение А-А на фиг.1; на фиг.З - секция механизированной крепи с возможностью перемещения силовых элементов относительно перекрытия; на фиг.4-сечение Б-Б на фиг.З.
Секция механизированной крепи включает перекрытие 1, основание 2, на которых
жестко закреплены направляющие 3. В направляющих 3 подвижно установлены ползуны 4, которые шарнирно соединены с гидростойками 5 и жестко связаны с корпусами 6 корректирующих гидроцилиндров. В корпусе 6 корректирующих гидроцилиндров помещены поршни 7 со штоками 8, последние из них шарнирно закреплены соответственно на перекрытии 1 и основании 2, Корпуса 6 подпружинены с торцовыхсторон пружинами 9. На перекрытии 1 крепи жестко закреплены датчики 10, которые через плунжер 11 связаны с опорной плитой 12. Поршневые полости 13 датчиков 10 посредством трубопроводов 14 гидравлически сое- динены со штоковыми полостями 15
о
SQ
00
4
сл
СО
корректирующих гидроцилиндров (фиг.1 и 2).
В случае размещения секции в одном перекрытии корпус 6 корректирующего гидроцилиндра связан с ползуном 4 через двустороннюю вилку 16, закрепленную жестко на корпусе корректирующего гидроцилиндра (фиг.3,4). Нижняя часть гидростойки 5 шарнирно укреплена в основании 2 крепи без перемещения, а верхняя связана через ползун 4 и двустороннюю вилку 16с корпусом 6 корректирующего гидроцилиндра.
Секция работает следующим образом.
Крепь расперта между кровлей и почвой пласта. В исходном положении место приложения результирующей силы Q внешней нагрузки к опорной плите 12 совпадает с положением гидростоек 5, расположенных на равных расстояниях от датчиков 10, связанных с опорной плитой 12 через плунжеры 11. Такое расположение результирующей силы приводит к одинаковой нагрузке на датчики 10, установленные в левой и правой частях перекрытия 1, и вызывает в их поршневых полостях 13 одновременное повышение давления жидкости на одну и ту же величину. Это давление жидкости, равное по величине, из поршневых полостей 13 датчиков 10 передается через трубопроводы 14 в штоковые полости 15 корректирующих гидроцилиндров, установленных в перекрытии 1 и основании 2. За счет того, что торцовые поверхности корпусов 6 корректирующих гидроцилиндров, на которые воздействует давление жидкости, имеют одинаковую площадь So (без учета площади штока), а все пружины 9 установлены с равной степенью сжатия, повышение давления жидкости в корректирующих гидроцилиндрах не вызывает перемещение из корпусов 6 относительно неподвижно установленных поршней 7. Следовательно не происходит перемещение от исходного положения и гидростоек 5,связанных с корпусами 6 корректирующих гидроцилиндров в перекрытии 1 и основании 2 через ползуны 4.
При перераспределении внешней нагрузки место приложения ее равнодействующей силы к опорной плите 12 смещается, например, с Qi до Q2 или 0,з. При этом нагрузка на датчик 10, в сторону которого происходит этот сдвиг, увеличивается, что приводит к повышению в нем давления жидкости. Давление жидкости в поршневой полости 13 датчика 10, на который действует повышенная нагрузка, больше, чем в аналогичной полости 13 датчика 10, установленного в противоположной стороне от гидростоек 5. От датчиков 10 по трубопроводам 14 давление жидкости
передается в соответствующие штоковые полости 15 корректирующих гидроцилиндров, установленных в перекрытии 1 и основании 2, Между штоковыми полостями 15,
расположенными по обе стороны от поршней 7, образуется перепад (разность) давления. Это приводит к перемещению корпусов 6 гидроцилиндров относительно поршней 7, закрепленных неподвижно через штоки 8 на
перекрытии 1 и основании 2, в сторону изменения места приложения равнодействующей силы. Одновременно в этом же направлении параллельно исходному положению перемещаются и гидростойки 5, связанные с корпусами 6 через ползуны 4, давление которых происходит по направляющим 3. Смещение гидростоек 5 осуществляется до тех пор, пока сила сжатия - растяжения пружин 9, установленных в штоковых полостях компенсирующих гидроцилиндров, не скомпенсируют разницы давлений, что будет соответствовать размещению гидростоек 5 под местом приложения результирующей силы внешних
нагрузок. Это достигается подбором пружин 9 и других параметров конструктивных элементов секции из следующих условий.
Условие равновесия корпусов 6 корректирующих гидроцилиндров и связанных с
ними гидростоек 5
PiSo P2S0+K Л X,
где Pi и 2 соответственно давление жидкости в противоположных датчиках 10 и в соединенных с ними штоковых полостях 15,
корректирующих гидроцилиндров;
So - площадь торцовых поверхностей гидроцилиндров (без учета площади штока), К - жесткость сжатия - растяжения пружин;
А X - отклонение гидростоек 5 от исходного положения.
Pi So Р2 So
ОтсюдаДХ К
Место приложения равнодействующей силы внешних нагрузок после ее смещения от центра между датчиками 10 ду I . Pi Si - Р2 S2 PiSi +P2S2 где I - расстояние между датчиками 10; Si, S2 - соответственно площади поршневых полостей датчиков 10,
чДХ
I Pi - Р2
Pi + Р2
Следовательно смещение гидростоек 5 крепи будет равно смещению места приложения результирующей силы внешних нагрузок при
so / о о ч - I Pi -Р2 т(Р1-Р2)-2 ppj-p
или
So t
К 2 ( Pi + P2 )
С учетом этого выражения выбираются конструктивные и силовые параметры элементов, входящих в секцию механизированной крепи к внешним нагрузкам.
В случае шарнирного закрепления нижней части гидростоек 5 в основании 2 (см.фиг.З) при изменении места приложения результирующей силы внешних нагрузок с Qi до Q2 или Оз происходит перемещение в это место только верхней части гидростоек 5, которое зависит от перемещения корпуса 6 корректирующего гидроцилиндра и передается на гидростойки 5 через двустороннюю вилку 16 и установленный в направляющих 3 ползун 4.
Изобретение позволяет повысить адаптацию механизированной крепи к различным условиям нагружения и позволяет рационально изменить положение гидростоек в зависимости бт места действия результирующей силы внешних нагрузок, что обеспечивает оптимальный режим работы силовых элементов крепи.
Формула изобретения
1. Секция механизированной крепи, включающая основание, перекрытие, подвижно соединенные с установленной между ними гидростойкой, связанной с корректирующим гидроцилиндром, установленным в перекрытии, отличающаяся тем, что, с
целью повышения адаптации механизированных крепей к условиям нагружения, перекрытие крепи выполнено с направляющим пазом и связано с гидростойкой посредством установленного в направляющем пазу ползуна, шарнирно соединенного с гидростойкой и жестко связанного с корпусом корректирующего гидроцилиндра, выполненного подпружиненным с двух сторон поршнем и двумя штоками, которые шарнирно закреплены
на перекрытии, при этом перекрытие снабжено датчиками, гидравлически связанными с корректирующим гидроцилиндром.
2. Секция по п.1,отличающаяся тем, что ползун соединен с корректирующим гидроцилиндром посредством двусторонней вилки, жестко закрепленной на корпусе корректирующего гидроцилиндра.
3. Секция по п.1,отличающаяся тем, что нижняя часть гидростойки шарнирно соединена с основанием, а направляющий паз выполнен по окружности, центр которой расположен в центре шарнира соединения гидростойки с основанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Секция механизированной крепи | 1979 |
|
SU945464A1 |
| Секция механизированной крепи | 1989 |
|
SU1714155A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1987 |
|
RU1468077C |
| СПОСОБ АДАПТАЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ К ВНЕШНИМ НАГРУЗКАМ | 2003 |
|
RU2234605C1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| Секция механизированной крепи | 1983 |
|
SU1105656A1 |
| Секция механизированной крепи | 1982 |
|
SU1060795A1 |
| Механизированная крепь для выемки угля с закладкой выработанного пространства | 1977 |
|
SU693028A1 |
| Линейная секция механизированной крепи | 1982 |
|
SU1254167A1 |
| Секция механизированной крепи | 1979 |
|
SU945465A1 |
Изобретение относится к горному делу и м.б. использовано в конструкцияхмехани- зированной крепи (МК). Цель - повышение адаптации МК к условиям нагружения. Секция МК снабжена устройством для адаптации, которое включает перекрытие 1, основание 2, направляющие 3. В направляющих 3 подвижно установлены ползуны 4, соединенные шарнирно с гидростойками 5 и жестко с помощью двусторонней вилки - с корпусами 6 корректирующих цилиндров (КЦ). Штоки 8 КЦ шарнирно закреплены на перекрытии 1 и основании 2. Корпуса 6 подпружинены пружинами 9. Поршневые полости 13 датчиков 10 гидравличесгчИ соединены со штоковыми полостями 15 кЦ. Нижняя часть гидростойки шарнирно соединена с основанием 2. Направляющий паз выполнен по окружности с центром в месте соединения гидростойки с основанием. При перераспределении внешней нагрузки место приложения ее равнодействующей смещается. При этом нагрузка на датчик 10 увеличивается. Давление в поршневой полости 13 передается в штоковую полость 15. Это приводит к перемещению корпусов 6 относительно поршней 7 в сторону нового места приложения равнодействующей. При этом перемещаются гидростойки, что позволяет повысить адаптацию МК и обеспечить оптимальный режим работы силовых элементов. 2 з.п.ф-лы, 4 ил, сл с
1
3 8 SJ
10
А Фив. /
159 Sn8 2
w
Oa
Фиг. У
| Авторское, свидетельство СССР № 943404,кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для соединения перекрытия с гидростойкой | 1988 |
|
SU1610039A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
