Изобретение относится к энергетике и может быть использовано в автономных электроагрегатах с приводными тепловыми двигателями, работающими при переменной частоте вращения.
Известна электроэнергетическая установка, содержащая двигатель внутреннего сгорания и асинхронизированный синхронный генератор.
Недостатком этой установки является низкая стабильность частоты вращения в режимах постоянных нагрузок, что обусловливает перерасход топлива.
Известна электроэнергетическая установка, состоящая из дизельного двигателя, асинхронизированного синхронного генератора, в которой частота вращения вала регулируется в функции от нагрузки
Недостатком этой установки является низкое быстродействие в динамических режимах, что приводит к низкой экономичности.
Наиболее близкой по технической сущности к предлагаемому устройству является система регулирования топливоподачи двигателя внутреннего сгорания транспортной энергетической установки.
Недостатком этой системы является низкая экономичность, что приводит к перерасходу топлива.
Низкая экономичность прототипа обусловлена тем, что при управлении процессами преобразования энергии с целью обеспечения минимума расхода топлива отсутствует комплексное многомерное регулирование с отрицательными обратными связями по углу опережения впрыска, частоте вращения и коэффициенту избытка воздуха дизеля в зависимости от нагрузочных режимов.
Целью изобретения является повышение экономичности.
Указанная цель достигается гем, что в известную энергетическую устанопку со(Л
С
о
Ч) 00 4 О 00
держащую дизель с турбокомпрессором и топливным насосом, электрический генератор с системами возбуждения и регулирования напряжения, кинематически связанный с валом отбора мощности дизеля, датчик частоты вращения коленчатого вала дизеля, датчик активной мощности, блок управления, вход которого связан с выходами датчиков, и исполнительный механизм, кинематически связанный с органом дозирования топливного насоса, а электрически - с входом блока управления, дополнительно введены датчик положения органа дозирования, датчик угла опережения впрыска топлива, датчик частоты вращения турбокомпрессора, датчик давления нэддуваемо- го воздуха, датчики давления и температуры окружающей среды, орган регулирования угла опережения впрыска топлива с исполнительным механизмом, орган регулирования давления наддува с исполнительным механизмом и датчик положения органа регулирования давления наддува, блок управления выполнен в виде управляющей микроЭВМ с шиной входных данных, блоком памяти с записанными в нем подпрограммами оптимизация, входными преобразователями по числу датчиков, выходными преобразователями по числу исполнительных механизмов, а также с процессором, шина входных данных выполнена в виде входа.блока управления, а каждый из выходных преобразователей своим выходом связан со входом соответствующего исполнительного механизма, причем выходы выходных преобразователей выполнены в виде выхода блока управления.
Введение блока управления в виде управляющей микроЭВМ с блоком памяти и подключение через входной преобразователь к входу блока управления датчика активной мощности позволяет по текущему значению нагрузки PH{t) на основе заложенных в блоке памяти оптимальных зависимостей скорости от нагрузки Ohm т{Рн), угла опережения впрыска от скорости v0m - f(ft) и коэффициента избытка воздуха от скорости Ооггг f(ft) вычислить оптимальные значения
йЪпт , опт 1 (Хот
Подключение выхода датчика частоты вращения через входной преобразователь к входу блока управления, а выхода последнего через выходной преобразователь к исполнительному механизму, кинематически связанному с органом дозирования топливного насоса, делает контур управления скоростью замкнутым. Введение органа регулирования угла опережения впрыска топлива с исполнительным механизмом, подключение входа последнего через выходной преобразователь к выходу блока управления позволяет сформировать контур управления впрыском. Подключение датчика угла опережения впрыска топлива через входной преобразователь к блоку управления делает контур управления впрыском замкнутым. Введе0 ние органа регулирования давления наддува с исполнительным механизмом, подключение входа последнего через выходной преобразователь к выходу блока управления позволяет сформировать контур
5 управления наддувом двигателя. Подключение датчика положения органа дозирования, датчика положения органа регулирования давления наддува, датчика частоты вращения турбокомпрессора, дат0 чика давления наддува, датчиков давления и температуры окружающей среды через входные преобразователи к входам блока уп - равления позволяет образовать отрицательную обратную связь в контуре
5 управления наддувом двигателя.
Блок управления по статической характеристике компрессора Лк f(Wk Gk. с&), скоростной характеристике топливного насоса дц f(h, ft ) и программе вычисле0 нмя текущего значения коэффициента избытка воздуха a (t), заложенных в блоке памяти, с учетом текущих значений давления м температуры окружающей среды вычисляет a (t).
5 Регулирование в контурах управления скоростью, впрыском и наддувом осуществляется по отклонениям, которые вычисляются в блоке управления как разности задающих воздействий, т.е. оптимальных,
0 и текущих значений регулируемых величин:
Ай «опт - со (t ); АV VORT - v (t ); Да оъпт -«(t) Таким образом, наличие замкнутых
$ контуров управления скоростью, впрыском и наддувом, регулирование относительно оптимального для данной нагрузки значения скорости, оптимальных для данной оптимальной скорости угла опережеQ ния впрыска и коэффициента избытка воздуха, а также учет атмосферного давления и температуры окружающей среды позволяет в отличии от прототипа выбрать наиболее экономичный режим преобразования энергии топлива, а следовательно, повысить экономичность установки.
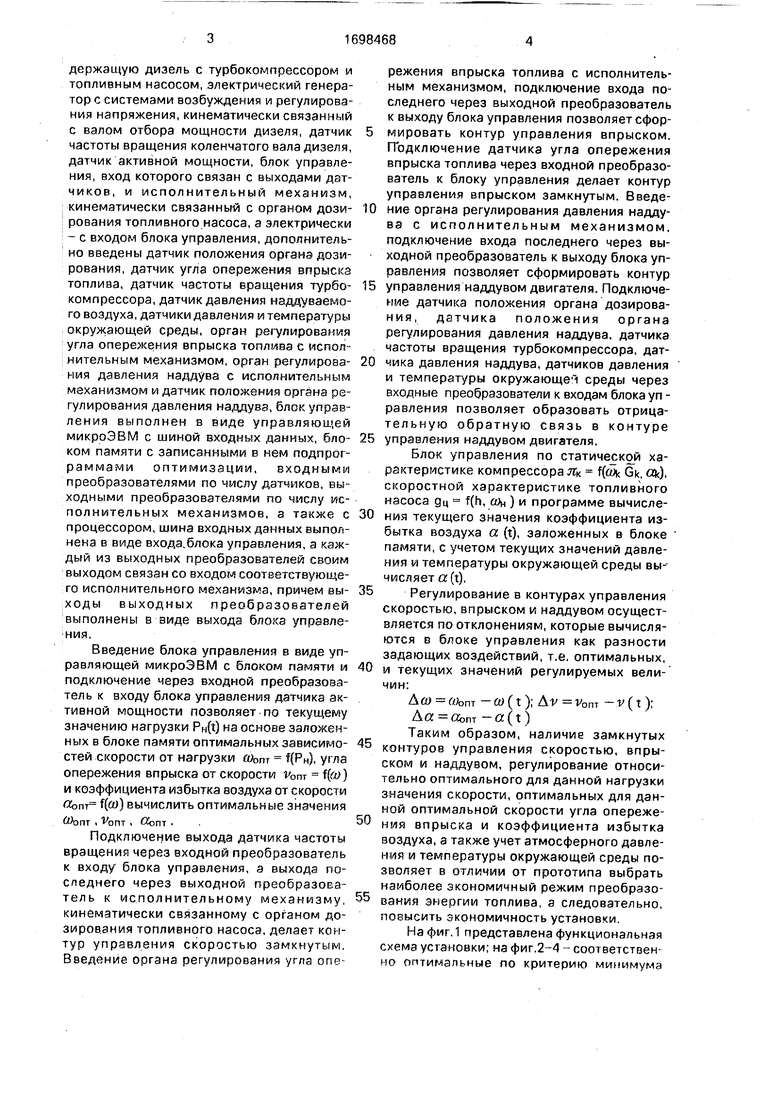
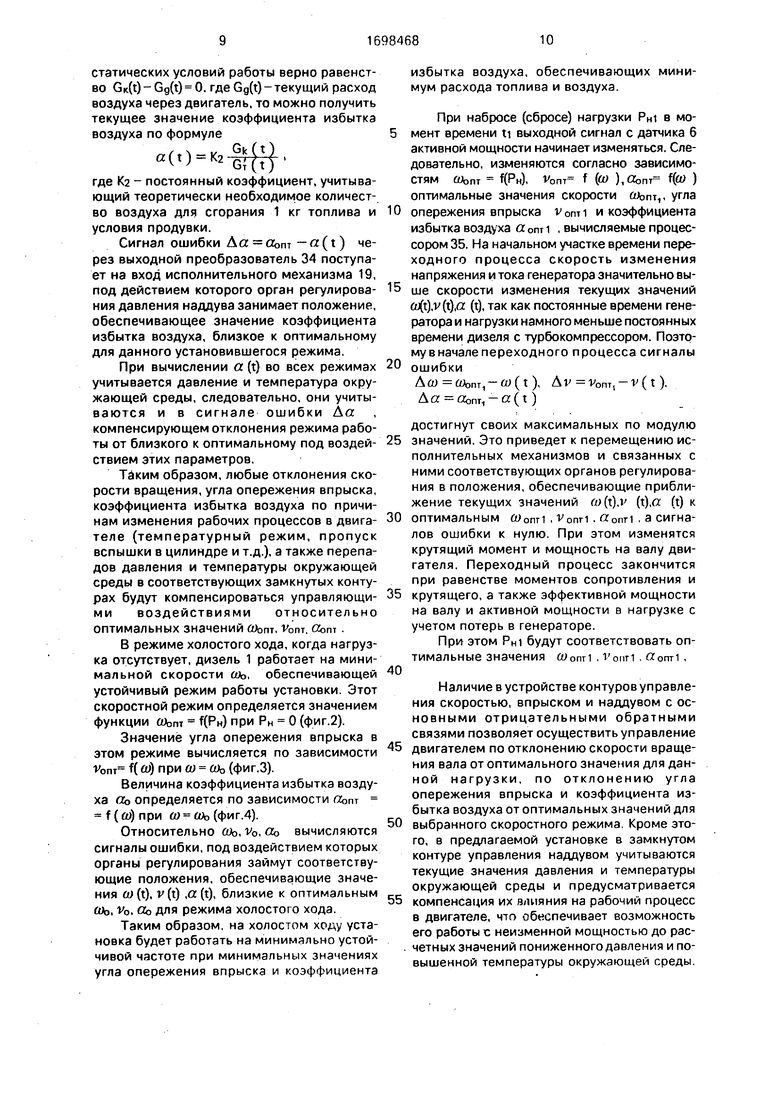
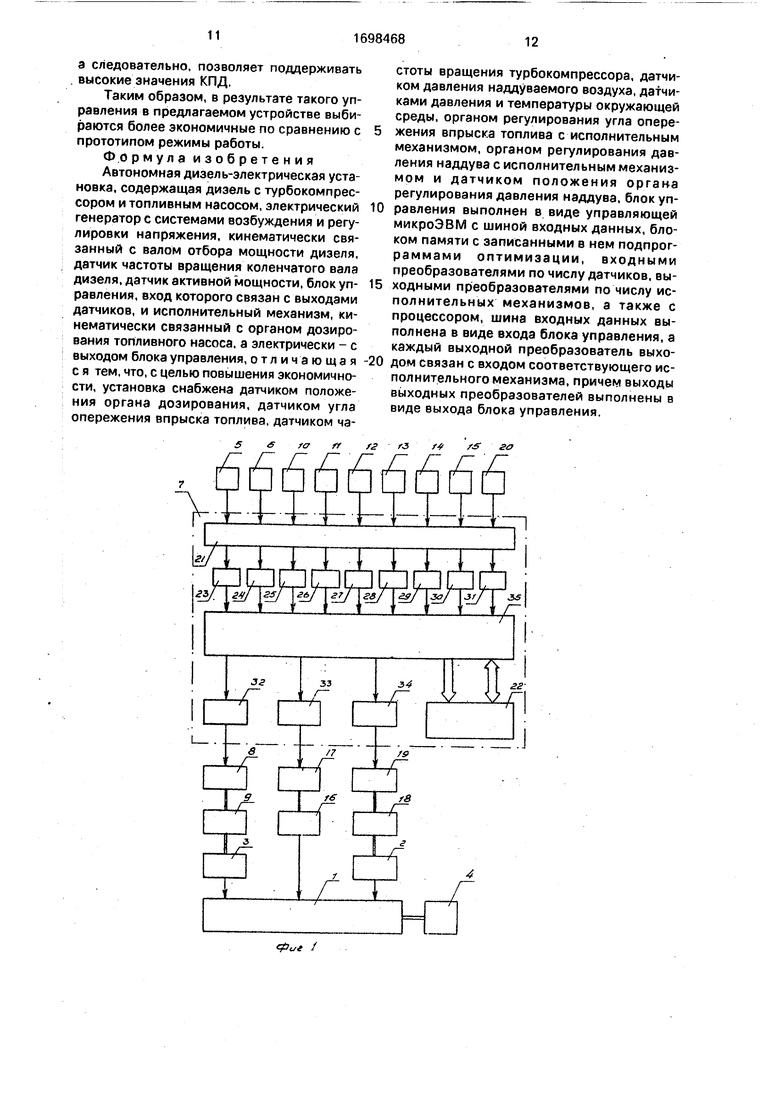
На фмг.1 представлена функциональная схема установки; на фиг.2-4 - соответственно оптимальные по критерию минимума
5
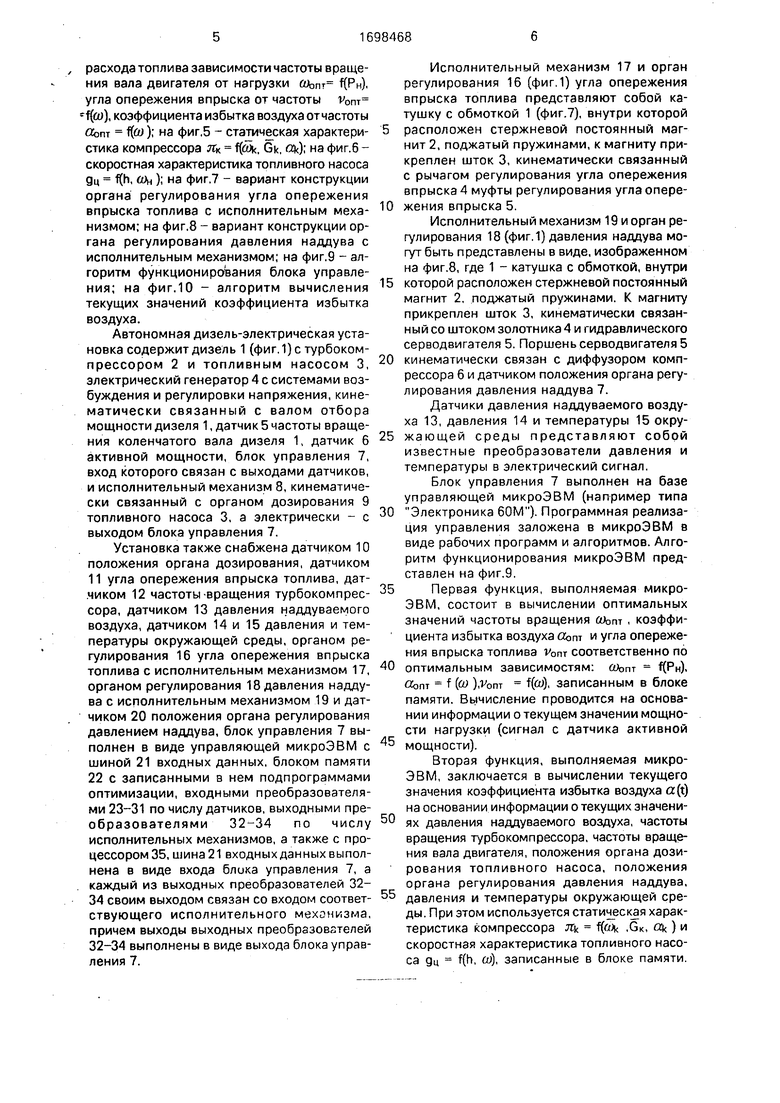
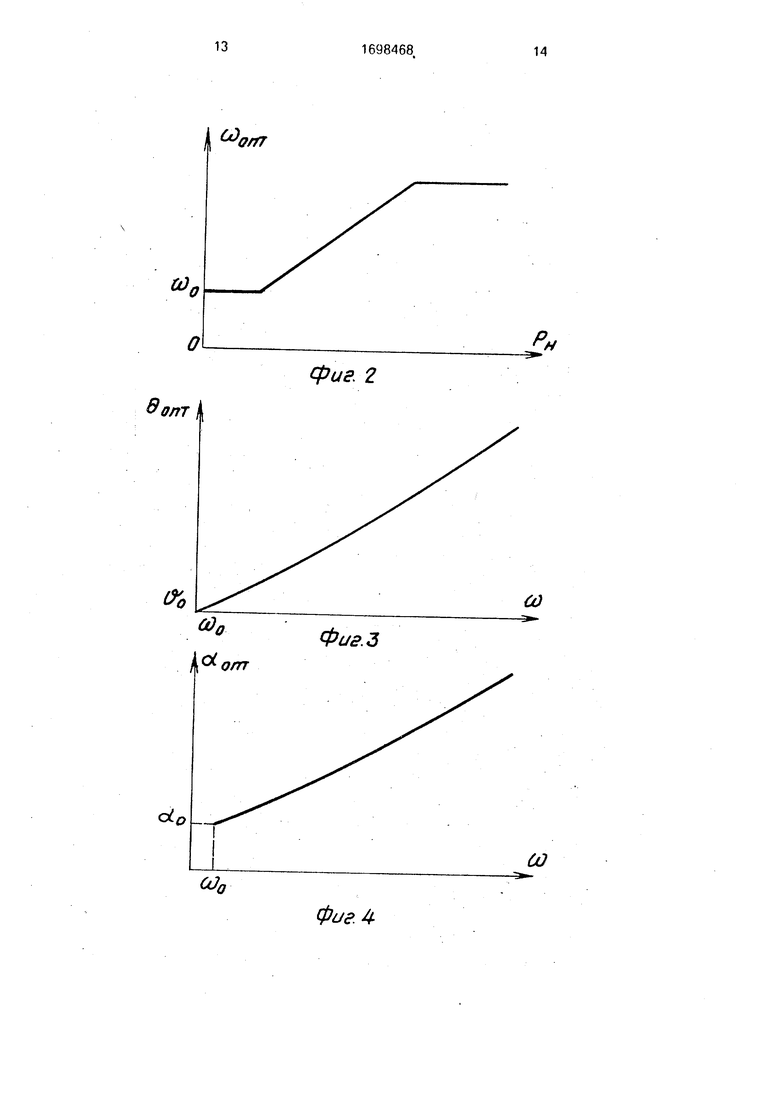
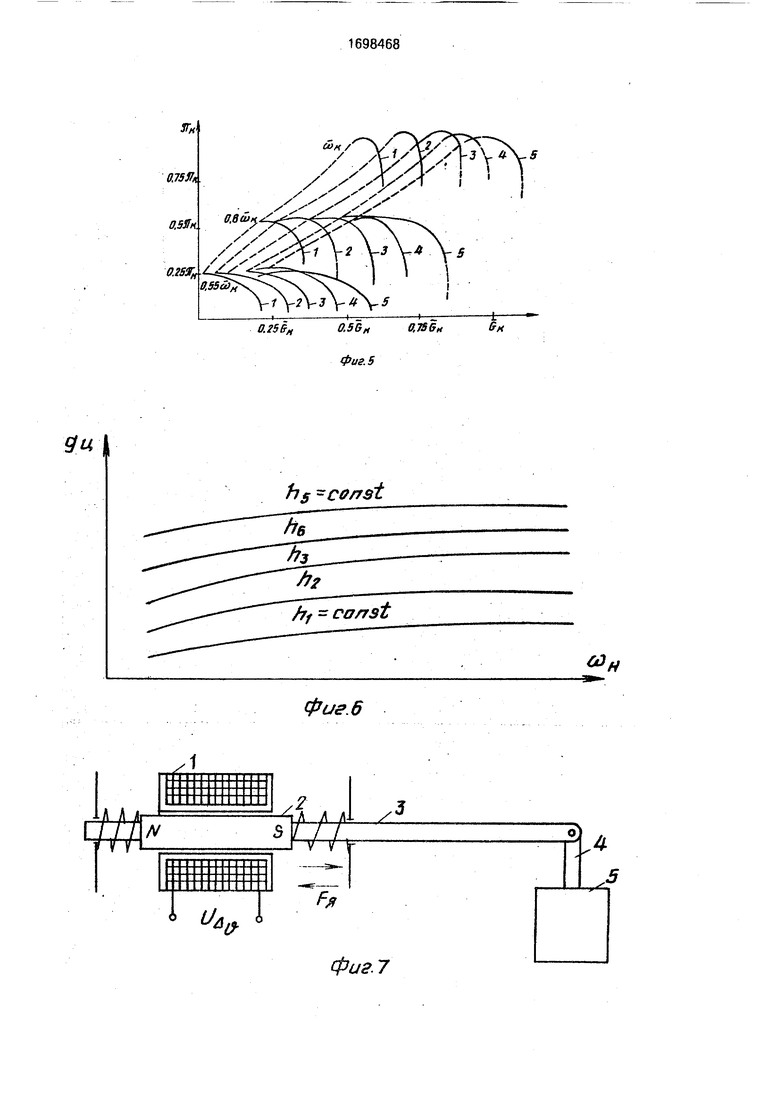
расхода топлива зависимости частоты вращения вала двигателя от нагрузки i(, гла опережения впрыска от частоты V0m f(ft)), коэффициента избытка воздуха от частоты опт flw); на фиг.5 - статическая характеритика компрессора тгк f((uk, Gk, «k); на фиг.6 - коростная характеристика топливного насоса ц f(h, а) ); на фиг.7 - вариант конструкции органа регулирования угла опережения впрыска топлива с исполнительным механизмом; на фиг.8 - вариант конструкции органа регулирования давления наддува с исполнительным механизмом; на фиг.9 - алгоритм функционирования блока управления; на фиг,10 - алгоритм вычисления екущих значений коэффициента избытка воздуха.
Автономная дизель-электрическая установка содержит дизель 1 (фиг. 1) с турбокомпрессором 2 и топливным насосом 3, электрический генератор 4 с системами возбуждения и регулировки напряжения, кинематически связанный с валом отбора мощности дизеля 1, датчик 5 частоты вращения коленчатого вала дизеля 1, датчик 6 активной мощности, блок управления 7, вход которого связан с выходами датчиков, и исполнительный механизм 8, кинематически связанный с органом дозирования 9 топливного насоса 3, а электрически - с выходом блока управления 7.
Установка также снабжена датчиком 10 положения органа дозирования, датчиком 11 угла опережения впрыска топлива, дат- чиком 12 частоты-вращения турбокомпрессора, датчиком 13 давления наддуваемого воздуха, датчиком 14 и 15 давления и температуры окружающей среды, органом регулирования 16 угла опережения впрыска топлива с исполнительным механизмом 17, органом регулирования 18 давления наддува с исполнительным механизмом 19 и датчиком 20 положения органа регулирования давлением наддува, блок управления 7 выполнен в виде управляющей микроЭВМ с шиной 21 входных данных, блоком памяти 22 с записанными в нем подпрограммами оптимизации, входными преобразователями 23-31 по числу датчиков, выходными преобразователями 32-34 по числу исполнительных механизмов, а также с процессором 35, шина 21 входных данных выполнена в виде входа блика управления 7, а каждый из выходных преобразователей 32- 34 своим выходом связан со входом соответствующего исполнительного механизма, причем выходы выходных преобразователей 32-34 выполнены в виде выхода блока управления 7.
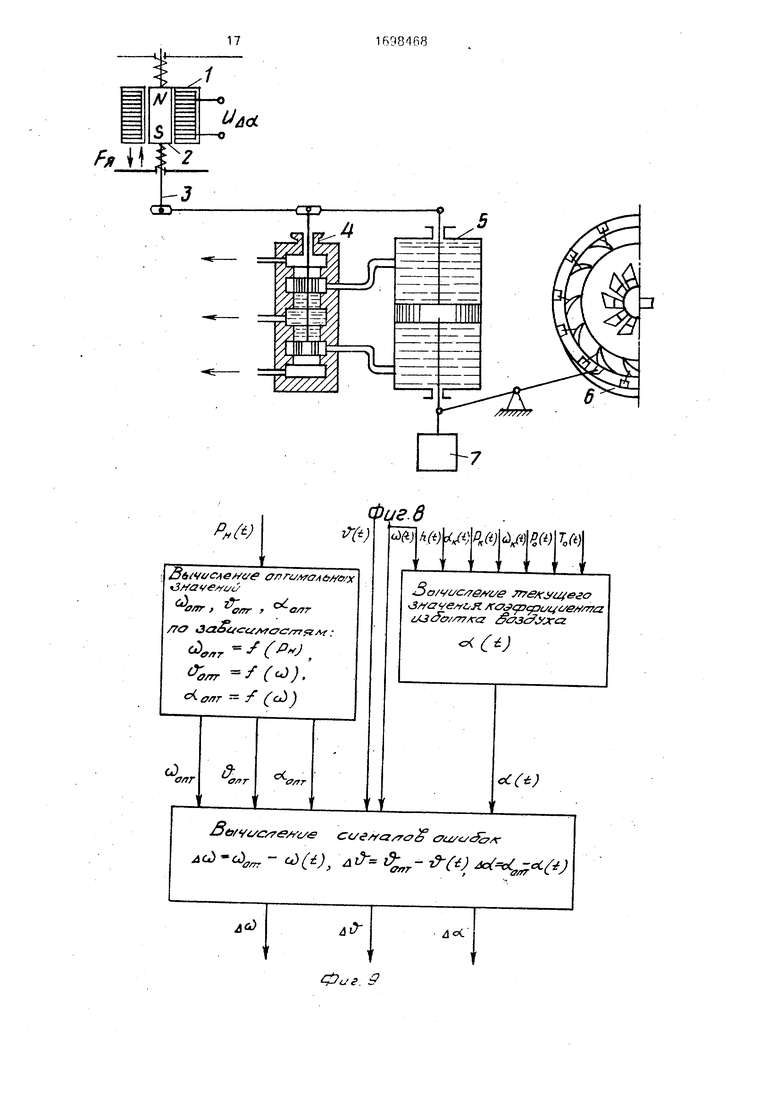
Исполнительный механизм 17 и орган регулирования 16 (фиг.1) угла опережения впрыска топлива представляют собой катушку с обмоткой 1 (фиг.7), внутри которой
расположен стержневой постоянный магнит 2, поджатый пружинами, к магниту прикреплен шток 3, кинематически связанный с рычагом регулирования угла опережения впрыска 4 муфты регулирования угла опере0 жения впрыска 5.
Исполнительный механизм 19 и орган регулирования 18 (фиг.1) давления наддува могут быть представлены в виде, изображенном на фиг.8, где 1 - катушка с обмоткой, внутри
5 которой расположен стержневой постоянный магнит 2. поджатый пружинами. К магниту прикреплен шток 3, кинематически связанный со штоком золотника 4 и гидравлического серводвигателя 5. Поршень серводвигателя 5
0 кинематически связан с диффузором компрессора 6 и датчиком положения органа регулирования давления наддува 7.
Датчики давления наддуваемого воздуха 13, давления 14 и температуры 15 окру5 жающей среды представляют собой известные преобразователи давления и температуры в электрический сигнал.
Блок управления 7 выполнен на базе управляющей микроЭВМ (например типа
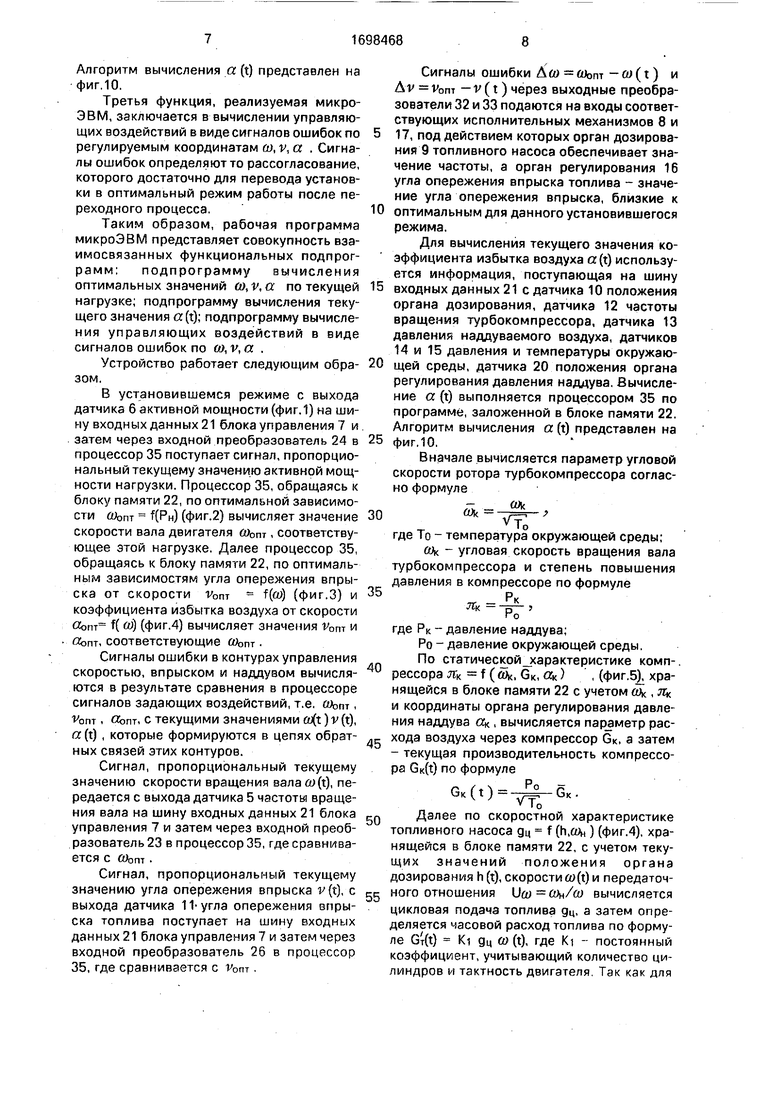
0 Электроника 60М). Программная реализация управления заложена в микроЭВМ в виде рабочих программ и алгоритмов. Алгоритм функционирования микроЭВМ представлен на фиг.9.
5 Первая функция, выполняемая микро- ЭВМ, состоит в вычислении оптимальных значений частоты вращения йЛэпт , коэффициента избытка воздуха оьпт и угла опережения впрыска топлива Vonr соответственно по
0 оптимальным зависимостям: 1Трн), Оопт f (У ),v0nr f(u), записанным в блоке памяти. Вычисление проводится на основании информации о текущем значении мощности нагрузки (сигнал с датчика активной
5 мощности).
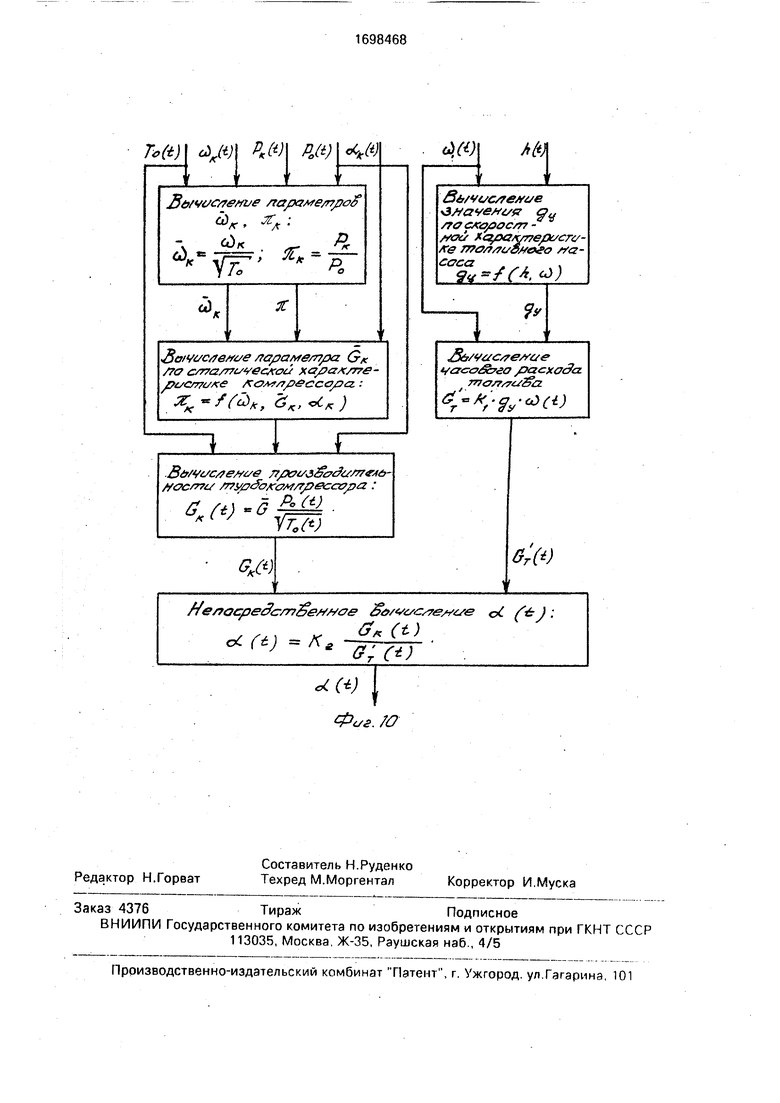
Вторая функция, выполняемая микро- ЭВМ, заключается в вычислении текущего значения коэффициента избытка воздуха ct(t) на основании информации о текущих значени0 ях давления наддуваемого воздуха, частоты вращения турбокомпрессора, частоты вращения вала двигателя, положения органа дозирования топливного насоса, положения органа регулирования давления наддува, давления и температуры окружающей среды. При этом используется статическая характеристика компрессора ль f(ftJk ,GK, оз) и скоростная характеристика топливного насоса дц f(h, ш), записанные в блоке памяти.
5
Алгоритм вычисления a. (t) представлен на фиг. 10.
Третья функция, реализуемая микро- ЭВМ, заключается в вычислении управляющих воздействий в виде сигналов ошибок по регулируемым координатам a),v,a . Сигналы ошибок определяют то рассогласование, которого достаточно для перевода установки в оптимальный режим работы после переходного процесса,
Таким образом, рабочая программа микроЭВМ представляет совокупность взаимосвязанных функциональных подпрограмм: подпрограмму вычисления оптимальных значений (t), vt а по текущей нагрузке; подпрограмму вычисления текущего значения a (t); подпрограмму вычисления управляющих воздействий в виде сигналов ошибок по (O,v,a .
Устройство работает следующим образом,
В установившемся режиме с выхода датчика 6 активной мощности (фиг.1) на шину входных данных 21 блока управления 7 и затем через входной преобразователь 24 в процессор 35 поступает сигнал, пропорциональный текущему значению активной мощности нагрузки. Процессор 35, обращаясь к блоку памяти 22, по оптимальной зависимости ЯРн) (фиг.2) вычисляет значение скорости вала двигателя 0)0т , соответствующее этой нагрузке. Далее процессор 35, обращаясь к блоку памяти 22, по оптимальным зависимостям угла опережения впрыска ОТ СКОРОСТИ Vom f(W) (фИГ.З) И
коэффициента избытка воздуха от скорости 2опт f( ш) (фиг.4) вычисляет значения V0m и «опт, соответствующие (Лот.
Сигналы ошибки в контурах управления скоростью, впрыском и наддувом вычисляются в результате сравнения в процессоре сигналов задающих воздействий, т.е. ofem . Vonr. (Хот, с текущими значениями ffl(t) v(t), a(t), которые формируются в цепях обратных связей этих контуров.
Сигнал, пропорциональный текущему значению скорости вращения вала co(t), передается с выхода датчика 5 частоты вращения вала на шину входных данных 21 блока управления 7 и затем через входной преобразователь 23 в процессор 35, где сравнивается С «опт
Сигнал, пропорциональный текущему значению угла опережения впрыска v(t), с выхода датчика 11 угла опережения впрыска топлива поступает на шину входных данных 21 блока управления 7 и затем через входной преобразователь 26 в процессор 35, где сравнивается с V0m
Сигналы ошибки Л а) иьпт - ft(t) и Av - v0m - v (t) через выходные преобразователи 32 и 33 подаются на входы соответствующих исполнительных механизмов 8 и
17, под действием которых орган дозирования 9 топливного насоса обеспечивает значение частоты, а орган регулирования 16 угла опережения впрыска топлива - значение угла опережения впрыска, близкие к
оптимальным для данного установившегося режима.
Для вычисления текущего значения коэффициента избытка воздуха a (t) используется информация, поступающая на шину
входных данных 21 с датчика 10 положения органа дозирования, датчика 12 частоты вращения турбокомпрессора, датчика 13 давления наддуваемого воздуха, датчиков 14 и 15 давления и температуры окружающей среды, датчика 20 положения органа регулирования давления наддува. Вычисление a (t) выполняется процессором 35 по программе, заложенной в блоке памяти 22. Алгоритм вычисления a (t) представлен на
фиг.10.
Вначале вычисляется параметр угловой скорости ротора турбокомпрессора согласно формуле
- ел ,
где То - температура окружающей среды;
- угловая скорость вращения вала турбокомпрессора и степень повышения давления в компрессоре по формуле
„ - РК
Лк--р-,
где Рк - давление наддува;
Ро - давление окружающей среды.
По статическрй характеристике комп-.
рессора лгк f ( УК, GK, OK ) , (фиг.бХ хранящейся в блоке памяти 22 с учетом ftfc , л и координаты органа регулирования давления наддува о , вычисляется параметр расхода воздуха через компрессор G. а затем - текущая производительность компрессора Gic(t) по формуле
е.(0-тЈ-&.
Далее по скоростной характеристике топливного насоса дц f (h,u ) (фиг.4), хранящейся в блоке памяти 22, с учетом текущих значений положения органа дозирования h (t), скорости ft) (t) и передаточного отношения Uo Шн/а вычисляется цикловая подача топлива дц, а затем определяется часовой расход топлива по формуле Gr(t) Ki дц ft) (t), где Ki - постоянный коэффициент, учитывающий количество цилиндров и тактность двигателя. Так как для
статических условий работы верно равенство GK(t) - Gg(t) 0, где Gg(t) - текущий расход воздуха через двигатель, то можно получить текущее значение коэффициента избытка воздуха по формуле
)-«.-ЈЈ}
где К2 - постоянный коэффициент, учитывающий теоретически необходимое количество воздуха для сгорания 1 кг топлива и условия продувки.
Сигнал ошибки Да Оопт - ct(t ) через выходной преобразователь 34 поступает на вход исполнительного механизма 19, под действием которого орган регулирования давления наддува занимает положение, обеспечивающее значение коэффициента избытка воздуха, близкое к оптимальному для данного установившегося режима.
При вычислении а (т) во всех режимах учитывается давление и температура окружающей среды, следовательно, они учитываются и в сигнале ошибки Да компенсирующем отклонения режима работы от близкого к оптимальному под воздействием этих параметров.
Таким образом, любые отклонения скорости вращения, угла опережения впрыска, коэффициента избытка воздуха по причинам изменения рабочих процессов в двигателе (температурный режим, пропуск вспышки в цилиндре и т.д.), а также перепадов давления и температуры окружающей среды в соответствующих замкнутых контурах будут компенсироваться управляющими воздействиями относительно оптимальных значений йЬпт, v0m, QW .
В режиме холостого хода, когда нагрузка отсутствует, дизель 1 работает на минимальной скорости шь, обеспечивающей устойчивый режим работы установки. Этот скоростной режим определяется значением функции «опт f(PfO при Рн 0 (фиг.2).
Значение угла опережения впрыска в этом режиме вычисляется по зависимости
Vom f( Ш) при ft Шо (фиг.З).
Величина коэффициента избытка воздуха «о определяется по зависимости оьпт (у)при ю оь (фиг.4).
Относительно ftfe, v0, Oo вычисляются сигналы ошибки, под воздействием которых органы регулирования займут соответствующие положения, обеспечивающие значения w(t), v(t) ,a (t), близкие к оптимальным Шо, V0, оь для режима холостого хода.
Таким образом, на холостом ходу установка будет работать на минимально устойчивой частоте при минимальных значениях угла опережения впрыска и коэффициента
избытка воздуха, обеспечивающих минимум расхода топлива и воздуха.
При набросе (сбросе) нагрузки РН1 в мо- мент времени ti выходной сигнал с датчика 6 активной мощности начинает изменяться. Следовательно, изменяются согласно зависимостям ftfcru f(PH), VonT f (W ),0bnr f((W )
оптимальные значения скорости ufem,, угла опережения впрыска v0mi и коэффициента избытка воздуха а опт i , вычисляемые процессором 35. На начальном участке времени переходного процесса скорость изменения напряжения и тока генератора значительно вы- ше скорости изменения текущих значений a#),v(t),a (t), так как постоянные времени генератора и нагрузки намного меньше постоянных времени дизеля с турбокомпрессором. Поэтому вначале переходного процесса сигналы ошибки
Au) ftJonT,-a(t), ,-v(t). &а 0ат,-а(.)
достигнут своих максимальных по модулю значений. Это приведет к перемещению исполнительных механизмов и связанных с ними соответствующих органов регулирования в положения, обеспечивающие приближение текущих значений ft(t),v (t),a (t) к оптимальным w0nri , V0nri . Qfonri , а сигналов ошибки к нулю. При этом изменятся крутящий момент и мощность на валу двигателя. Переходный процесс закончится при равенстве моментов сопротивления и крутящего, а также эффективной мощности на валу и активной мощности в нагрузке с учетом потерь в генераторе.
При этом РН1 будут соответствовать оптимальные Значения Ш0т . 1 onrl , П0т ,
Наличие в устройстве контуров управления скоростью, впрыском и наддувом с основными отрицательными обратными связями позволяет осуществить управление
двигателем по отклонению скорости вращения вала от оптимального значения для данной нагрузки, по отклонению угла опережения впрыска и коэффициента избытка воздуха от оптимальных значений для
выбранного скоростного режима. Кроме этого, в предлагаемой установке в замкнутом контуре управления наддувом учитываются текущие значения давления и температуры окружающей среды и предусматривается
компенсация их влияния на рабочий процесс в двигателе, что обеспечивает возможность его работы с неизменной мощностью до расчетных значений пониженного давления и повышенной температуры окружающей среды.
а следовательно, позволяет поддерживать высокие значения КПД.
Таким образом, в результате такого управления в предлагаемом устройстве выбираются более экономичные по сравнению с прототипом режимы работы.
Формула изобретения Автономная дизель-электрическая установка, содержащая дизель с турбокомпрессором и топливным насосом, электрический генератор с системами возбуждения и регулировки напряжения, кинематически связанный с валом отбора мощности дизеля, датчик частоты вращения коленчатого вала дизеля, датчик активной мощности, блок управления, вход которого связан с выходами датчиков, и исполнительный механизм, кинематически связанный с органом дозирования топливного насоса, а электрически - с выходом блока управления, отличающая с я тем, что, с целью повышения экономичности, установка снабжена датчиком положения органа дозирования, датчиком угла опережения впрыска топлива, датчиком частоты вращения турбокомпрессора, датчиком давления наддуваемого воздуха, датчиками давления и температуры окружающей среды, органом регулирования угла опережения впрыска топлива с исполнительным механизмом, органом регулирования давления наддува с исполнительным механизмом и датчиком положения органа регулирования давления наддува, блок управления выполнен в виде управляющей микроЭВМ с шиной входных данных, блоком памяти с записанными в нем подпрограммами оптимизации, входными преобразователями по числу датчиков, выходными преобразователями по числу исполнительных механизмов, а также с процессором, шина входных данных выполнена в виде входа блока управления, а каждый выходной преобразователь выходом связан с входом соответствующего исполнительного механизма, причем выходы выходных преобразователей выполнены в виде выхода блока управления.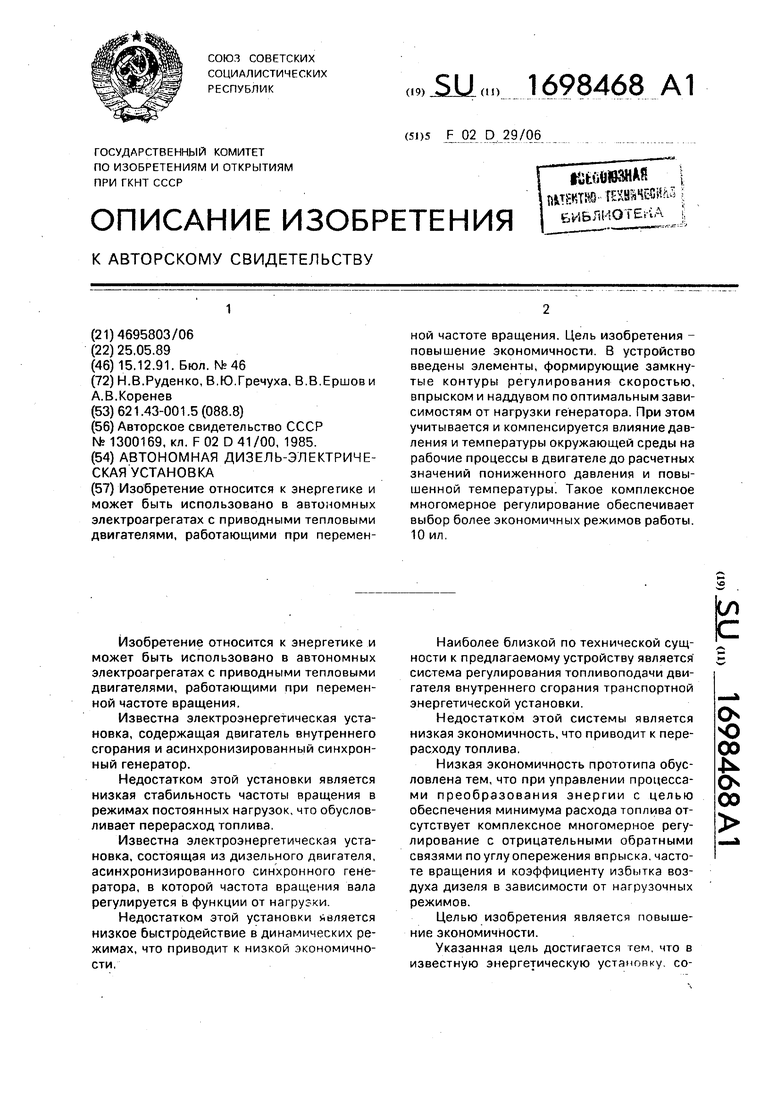
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовая установка | 1975 |
|
SU681204A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДИЗЕЛЯ С НАДДУВОМ | 1992 |
|
RU2038500C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ДИЗЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370659C2 |
| Регулятор дизеля с турбонаддувом | 1990 |
|
SU1813902A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| Способ работы дизеля с турбонаддувом и дизель с турбонаддувом | 1991 |
|
SU1809136A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИЗЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2170849C1 |
Изобретение относится к энергетике и может быть использовано в автономных электроагрегатах с приводными тепловыми двигателями, работающими при переменной частоте вращения. Цель изобретения - повышение экономичности. В устройство введены элементы, формирующие замкнутые контуры регулирования скоростью, впрыском и наддувом по оптимальным зависимостям от нагрузки генератора. При этом учитывается и компенсируется влияние давления и температуры окружающей среды на рабочие процессы в двигателе до расчетных значений пониженного давления и повышенной температуры. Такое комплексное многомерное регулирование обеспечивает выбор более экономичных режимов работы. 10 ил.
ff
сллллллл.
г
SS
DnnCZJC
/
ww
ерие /
л
/з
f4
/Ј го
cpue. 2
|
(Уо
000 &om
Фиг.З
Сип
фиеЛ
О)
.25ЭГ
9«
Фиг. 6
/
ш
у j-
l
и,
Ар
фиг.7
AV5
&н
W)
Вб{Числеме/& arrc/ r A&#o/x 3Mave/stj s
, , ЗЛо4/Ј:е лгЈ7 /77сгм:
«brr-sc ;,
-/().
f (±)
cJ
oar
P/TT
&tifVtS&7ff/T t/ s cae/fa/raE1 e it/t/ Ј r
ь -cJ - o);, &() .()
Ф«г 9
1698468
ОД
Фиг-в
«№)
ь®№Ш)ь&%щЩ
v Г
L
jSa/vvc/rejv&e яг&гущего iSrt&ye/fbJl х& ф срщг/е///77а И3 5а//77л-сг Ј&3Ј7&лга
C)
()
&0ЛсС
ТоМ
М №)®
М Р°Щ
St /wc/7effue /га/хзме/ттр0Ј
%
&к.
6)
У/Г
б)«
РО
о).
X
&aivvcrfe#t/e /гараме/л/хг G crt7 z/m/vec/(0(j xa/ ax/rre- 0ts&77t/xe Холг/г/э&сса/эа.:
&«-/&, с,ск)
1
±
B&Wt/c/jewe 7 /x t/3&7J s/77 x b rtocsryts /ггф Зсжам/гресс&ра :
ям-д&МVuv
G&
ле/ асреЈс:/т}Ёе#/у0е eewe/e/res/cfe cxf (&) ,,,, K &(t)
(6)
() |
Фиг. 7U
W) M
LJ1
Gb/wc/гемие /tavew/ft а„
/Т0СХЦООС/Г7 /ятсе Хсгрег/улерг/сгс/Л & 7J70/r/ri/O#OiЈO S aссса я , . ,J)
1
&г/у хс#е/г &е t/tzco&reo /эасхоЗа.
t rr70S /7tsЈa.
4г-,-ду-ь С.)
0rfi)
| Авторское свидетельство СССР Ms 1300169, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
