Изобретение относится к транспортному машиностроению, в частности к трансмиссиям транспортных средств с ходоуменьшителямиги является усовершенствованием изобретения по основ ному авт. св. № 1586928.
Целью изобретения является повышение маневренности транспортного средства при движении его на пониженных технологических скоростях за счет снижения сил сопротивления при повороте.
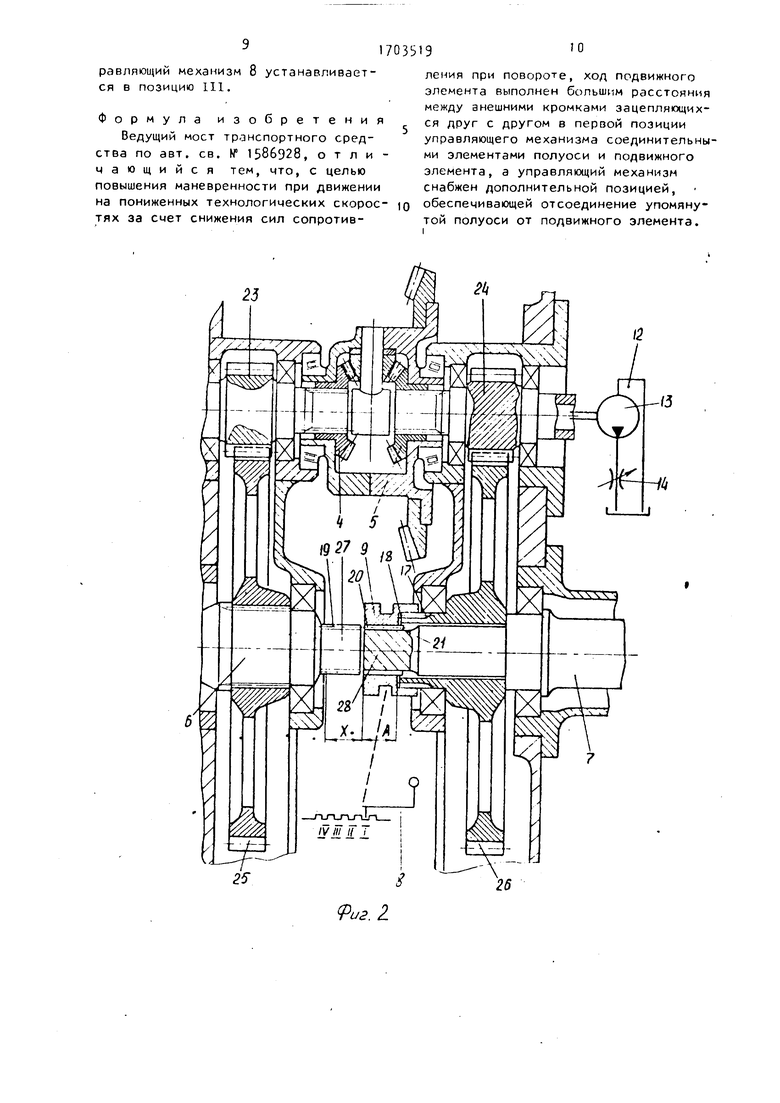
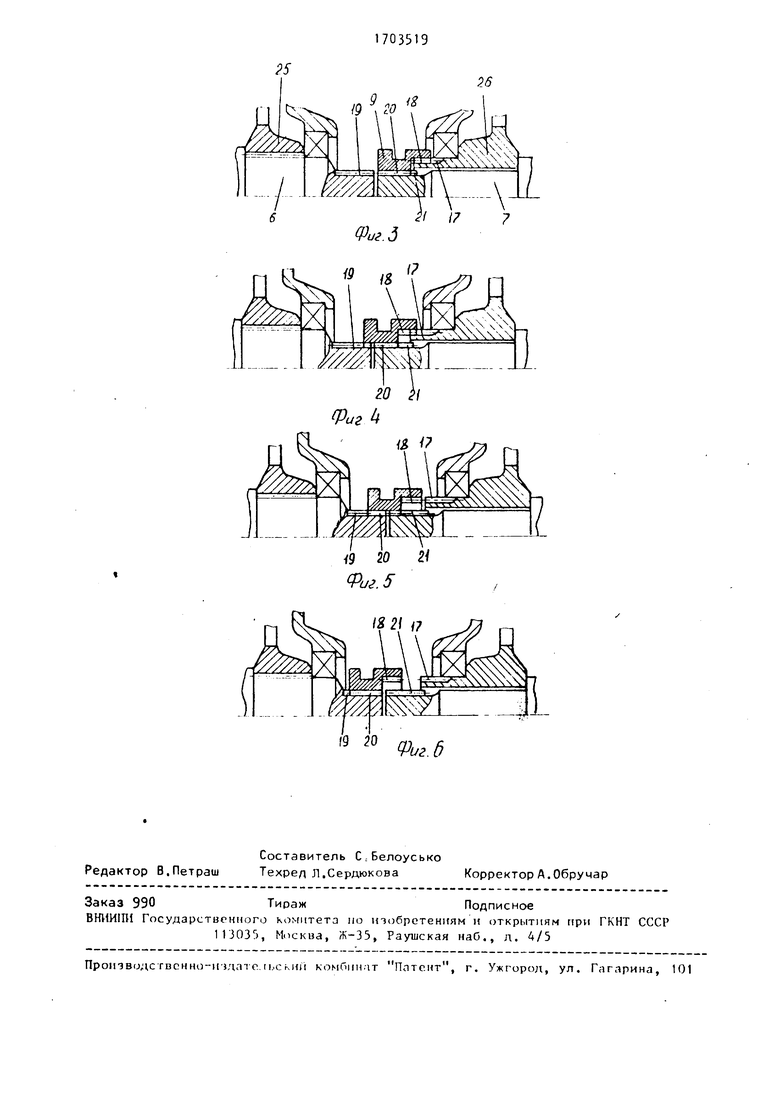
На фиг. 1 представлена конструктивная схема устройства применительно к ведущему мосту самоходного шас- си - Т-16 М; на фиг. 2 - конструктивная схема ведущего моста тракторов типа Беларусь ; на фиг. 3 - взаимное расположение элементов ведущего моста трактора Беларусь в первой позиции управляющего механизма; на фиг. k - то же во второй позиции; на фиг. 5 - то же, в третьей позиции; на фиг.6 - то же, в четвертой позиции.
Ведущий мост транспортного средст- ва (фиг. 1) содержит установленный в картере межколесный,,дифференциал, корпус 1 которого кинематически связа с двигателем 2. В корпусе 1 установлены сателлиты 3, зацепляющиеся с по- луосевыми шестернями и 5. Полуоси 6 и 7, выполненные укороченными, кинематически связаны с движителями (не показаны). Ведущий мост снабжен управляющим механизмом 8, который кинематически связан с подвижным элементом 9 Последний выполнен в виде полого вала, размещенного между полуосями 6 и 7. Подвижный элемент 9 снабжен направляющими колонками 10, которые размещены в центрирующих отвестиях 11, выполненных в полуосях 6 и 7. На корпусе заднего моста закреплено тормозное устройство 12,
5
5
0
Q с 0
5
состоящее из насоса 13 и регулируемого дросселя , На валу насоса 13 закреплена ведомая звездочка 15, образующая с ведущей звездочкой 16, закрепленной на полуосевой шестерне 5, повышающую цепную передачу. Полуосевая шестерня 5 снабжена соединительными элементами (шлицами) 17 для связи с соединительными Элементами (шлицами) 18 подвижного элемента 9. Полуосевая шестерня 1 снабжена соединительными элементами i (шлицами) 19. Часть шлицевого отверстия в шестерне 4 служит для ее жесткого соединения с полуосью 6, а другой, открытый, участок шлицевого отверстия со шлицами 19 предназначен для связи с соединительными элементами (шлицами) 20 подвижного элемента 9.
Полуось 7 снабжена соединительны-: ми элементами (шлицами) 21 для связи с соединительными элементами (шлицами) 22 подвижного элемента 9. Ход подвижного элемента 9 выполнен большим расстояния А между внешними кромками зацепляющихся друг с другом в первой позиции управляющего механизма 8 (фиг. 1) соединительными элементами 21 и 22 полуоси 7 и подвижного элемента 9 соответственно, т.е.
.
Расстояние В между торцами полуоси 6 и подвижного элемента 9 в первой позиции управляющего механизма 8 выполнено равным либо большим величины хода X подвижного элемента 9:
В X.
В I позиции управляющего механизма 8 шлицы 17 полуосевой шестерни 5 зацепляются со шлицами 18 подвижного элемента 9, шлицы 22 последнего зацепляются со шлицами 21 полуоси 7.
517
При этом шлицы 19 полуосевой шестерни 4 и шлицы 20 подвижного элемента 9 разомкнуты. Тем самым обеспечивается жесткая связь полуоси 7 с полуосевой шестерней 5.
Во II позиции управляющего механизма 8 шлицы 18, 20 и 22 подвижного элемента 9 зацепляются одновременно со шлицами 17| 19 и 21 соответствен- мо полуосевых шестерен 5 и Ц и полуоси 7. Тем самым обеспечивается жесткая связь полуоси 7 с полуосевой шестерней 5 и через полуосевую шестерню J с полуосью 6, т.е. дифференциал заблокирован.
8 III позиции управляющего механизма 8 шлицы 20 и 22 подвижного элемента 9 связаны соответственно со шлицами 19 и 21 полуосевой шестерни k и полуоси 7, а шлицы 17 и 18 полуосевой шестерни 5 и подвижного элемента 9 разомкнуты. При этом обе полуоси 6 и 7 жестко связаны с полуосевой шестерней k, а полуосевая шестер- ня 5 отсоединена от соответствующей ей полуоси 7.
Управляющий механизм 8 снабжен дополнительной IV позицией, в которой только шлицы 20 подвижного элемента 9 связаны со шлицами 19 полуосевой шестерни 4, остальные шлицы разомкнуты. При этом полуось 7 отсоединена от трансмиссии транспортного средства
В устройстве согласно фиг. 2 полуосевые шестерни k и 5 межколесного дифференциала связаны с полуосями движителей 6 и 7 соответственно посредством конечных передач, которые включают в себя два вала-шестерни 23 и 2, зацепляющиеся с полуосевы- ми шестернями J{5 и 26 соответственно. В базовой конструкции ведущего моста трактора Беларусь полуоси 6 и 7 снабжены хвостовиками 27 и 28, имею- щими шлицы 19 и 21 соответственно. На хвостовиках 27 и 28 полуосей 6 и 7 установлен с возможностью осевого перемещения подвижный элемент 9 в виде зубчатой полумуфты. Насос 13 ре- гулируемого тормозного устройства 12 закреплен на крышке главного тормоза справа по ходу трактора. Вал насоса 13 установлен в отверстие вала- шестерни 24, который, таким образом, обеспечивает кинематическую связь полуосевой шестерни 5 дифференциала с насосом 13 регулируемого тормозного устройства 12„
п j
0 5
о
п
5
19
Полуосевая шестерня 26, расположенная со стороны регулируемого тормозного устройства 12, установлена с возможностью свободного вращения относительно соответствующей ей полуоси 7, что эквивалентно установке полуосевой шестерни 5 межколесного дифференциала с возможностью вращения относительно вала-шестерни Полуосевая шестерня 25 жестко закреплена на полуоси 6. Полуосевая шестерня 26 снабжена шлицами 17 для связи со шлицами 18 подвижного элемента 9 Последний снабжен шлицами 20 для связи со шлицами 19 и 21 соответственно полуосей 6 и 7. Управляющий механизм 8 выполнен четырехпозицион- ным„
Устройство работает следующим образом.
Крутящий момент от двигателя 2 через трансмиссию передается на корпус 1 межколесного дифференциала. При вращении корпуса 1 закрепленные в нем сателлиты 3 приводят во вращение полуосевые шестерни k и 5. Относительные частоты вращения полуосевых шестерен и 5,а также полуосей 6 и 7 зависят от режима работы ведущего моста.
Режим дифференциального привода. Управляющий механизм 8 переключается в позицию I. При движении транспортного средства в первом режиме крутящий момент, подводимый к корпусу дифференциала, делится между полуосями 6 и 7 поровну. В устройстве согласно фиг. 1 вращение от полуосевой шестерни 5 через шлицы 18 и 17 передается на подвижный элемент 9 и далее через шлицы 22 и 21 на полуось . 7. Вращение от полуосевой шестерни Ц передается На жестко связанную с ней полуось 6. При вращении полуосевой шестерни 5 вращается закрепленная на ней ведущая звездочка 16, которая через цепную передачу приводит во вращение закрепленную на валу насоса 13 ведомую звездочку 15. В первом режиме движения дроссель Ц тормозного устройства 12 полностью открыт, т.е, тормозной момент на валу насоса 13 отсутствует.Направляющие К9лонки 10 центрируют при вращении подвижный элемент 9 в отверстиях 11 полуосей 6 и 7 и исключают тем самым его биение относительно полуосевых шестерен Ь и 5.
7 .1
В устройстве согласно фиг. 2 крутящий момент от полуосевой шестерни 5 через вал-шестерню 2k передается на полуосевую шестерню 26. Вращение последней через и4лицы 17 и 18 передается на подвижный элемент 9, а от него через шлицы 20 и 21 хвостовику 28 полуоси 7. Вращение от полуосевой шестерни k на полуось 6 передается посредством вала-шестерни 23, зацепляющегося с полуосевой шестерне 25. Взаимное расположение рассматриваемых элементов ведущего моста в первой позиции управляющего механизм 8 представлено на фиг. 3. Частота вращения вала насоса 13 равна частоте вращения полуосевой шестерни 5 дифференциала.
Режим сблокированного привода.
Управляющий механизм 8 устанавливается в позицию II. В устройстве согласно фиг. 1 вращение от полуосевой шестерни 5 через шлицы 17 и 18 передается на подвижный элемент Э, а от шестерни k через шлицы 19 и 20 на полуось 6 и подвижный элемент 9. Так как последний посредством соединительных элементов 21 и 22 связан с полуосью 7, возникает жесткая связь между ролуосевыми шестернями k и 5 и полуосями 6 и 7, которые вращаются с одинаковой частотой. Тормозное устройство 12 во втором режиме полностью расторможенб.
Согласно фиг. 2 вращение от шестерни 26 через шлицы 17 и 18 передается на подвижный элемент 9 и от него через шлицы 20 и 21 на полуось, 7. Одровременно шлицы 20 подвижного элемента 9 зацепляются со шлицами 19 хвостовика 27 полуоси 6, создавая те самым жесткую связь между обеими no-i луосями 6 и 7. Таким образом, шлицы 20 подвижного элемента 9 в устройстве согласно фиг. 2 выполняют и функцию шлицев 22 подвижного элемент 9 из устройства согласно фиг. 1.
Режим ходоуменьшения.
Управляющий механизм 8 переводится в позицию III. В III позиции полуосевая шестерня 5 не связана с подвижным -элементом 9 и полуосью 7, так как шлицы 18 разомкнуты. Вращение от полуосевой шестерни 5 через зубчатые звездочки 16 и 15 передается только на вал насоса 13. Вращение от полуосевой шестерни k передается жестко связанной с ней по
0
5
0
5
0
5
0
луоси 6 и через шлицы 19 и 20 на подвижный элемент 9 и далее через шлицевое соединение 20-21 на полуось 7. Таким образом, скорость движения транспортного средства в режиме ходоуменьшения определяется частотой вращения полуосевой шестерни Ь межколесного дифференциала. Путем изменения степени закрытия регулируемого дросселя регулируется частота вращения полуосевой шестерни 5 межколесного дифференциала, при этом изменяется частота вращения полуосевой шестерни 4 и скорость транспортного средства.
В устройстве согласно фиг. 2 шлицы 17 и 18 полуосевой шестерни 26 и подвижного элемента 9 в III позиции управляющего механизма 8 разомкнуты (фиг. 5). Соединение полуосей 6 и 7 осуществляется посредством шли- цевых соединений и 20-21. При этом обе полуоси 6 и 7 жестко связаны с полуосевой шестерней 25, а полуосевая шестерня 5 дифференциала, вал-шестерня 21 и полуосевая шестерня 26 вращаются независимо от полуоси 7.
Маневрирование в режиме ходоуменьшения о
При движении транспортного средства в режиме ходоуменьшения полуоси 6 и 7 движителей заблокированы. В результате при повороте управляемых колес со стороны заблокированных ведущих возникает дополнительное сопротивление повороту. Для уменьшения этого сопротивления управляющий механизм 8 переводится в позицию IV„При этом вращение от полуосевой шестерни k межколесного дифференциала передается на полуось 6 и через шлицевое соединение 19-20 на подвижный элемент 9. Шпицы 18 и 22 последнего (фиг.1) выведены из зацепления соответственно со шлицами 17 полуосевой шестерни 5 и шлицами 21 полуоси 7, т.е. подвижный элемент 9 выполняет пассивную функцию, не нагружаясь крутящим моментом. Крутящий момент от корпуса 1 дифференциала передается только на одну полуось 6, вторая полуось 7 и соответствующее колесо находятся в ведомом режиме. В результате снижается сопротивление повороту и сохраняется при этом неизменной пониженная скорость движения. По завершении маневра транспортного средства управняющий механизм 8 устанавливается в позицию ill.
Формула изобретения
Ведущий мост транспортного средства по авт. св. № 1586928, отличающийся тем, что, с целью повышения маневренности при движении на пониженных технологических скоростях за счет снижения сил сопротивления при повороте, ход подвижного элемента выполнен большим расстояния между внешними кромками зацепляющихся друг с другом в первой позиции управляющего механизма соединительными элементами полуоси и подвижного элемента, а управляющий механизм снабжен дополнительной позицией,
обеспечивающей отсоединение упомянутой полуоси от подвижного элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
| Ведущий мост транспортного средства | 1989 |
|
SU1699824A2 |
| Проходная главная передача | 2018 |
|
RU2693433C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ ВЫСОКОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2163868C2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044942C1 |
| ПРОХОДНАЯ ГИПОИДНАЯ ГЛАВНАЯ ПЕРЕДАЧА | 2007 |
|
RU2353530C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2040721C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242656C2 |
| Способ управления блокируемым дифференциальным приводом колес транспортного средства и устройство для его осуществления | 1983 |
|
SU1130501A1 |
Изобретение относится к транспортному машиностроению, в частности к трансмиссиям транспортных средств с ходоуменьшителями. Целью изобретения является повышение маневренности при Движении на пониженных технологи3 ческих скоростях за счет снижения сил сопротивления при повороте. Ведущий мост содержит межколесный дифференциал, в корпусе 1 которого размещены полуосевые шестерни Ц и $, полуоси 6 и 7 и управляющий механизм 8, кинематически связанный с подвижным элементом 9. С шестерней 5 кинематически связано регулируемое тормозное устройство, содержащее насос 13 и дроссель k. Шестерня 5 снабжена соединительными элементами 17 для связи с элементами 18 элементом 9. Шестерня k снабжена элементами 19 для связи с полуосью бис элементами 20 элементом 9- Полуось 7 снабжена элементами 21 для связи с элементами 22 элементом 9. Управляющий механизм 8 обеспечивает посредством эле8 I k/ Я§Г1
23
25
Фиг. 2.
12
Фиг b
19 20
Фиг.З
Фиг. б
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
