Изобретение относится к транспортному машиностроению, в частности к трансмиссиям транспортных средств с ходоуменьшителями, и может быть использовано в тракторах и аналогичных машинах для получения пониженных технологических скоростей движения. .
Цель изобретения - повышение эффективности за счет обеспечения возможности получения бесступенчатого регулируемых г-юниженных скоростей движения транс- riopTHoro средства.
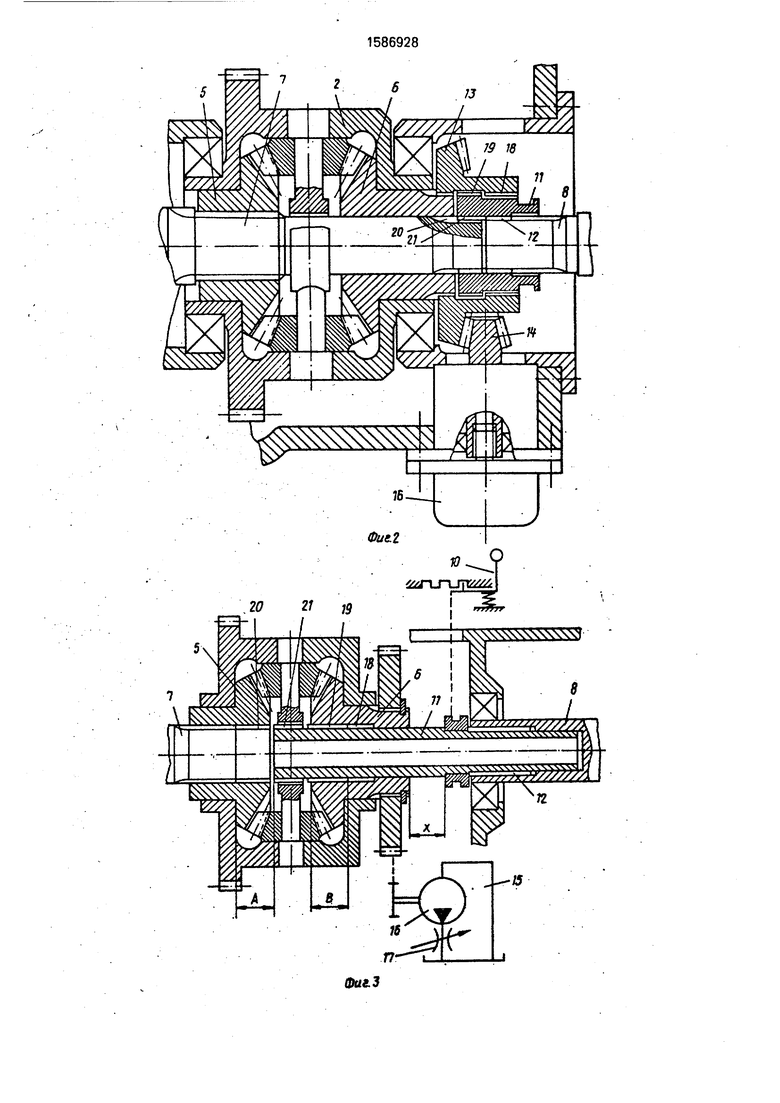
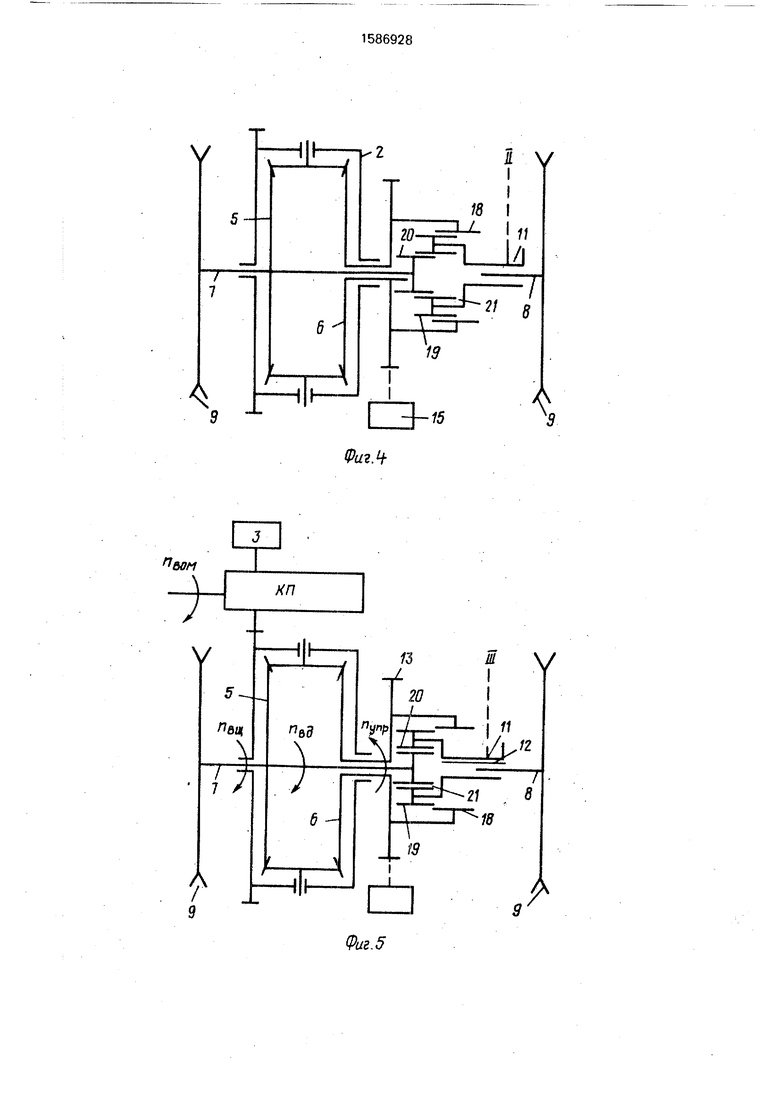
I На фиг. 1 представлена кинематическая 4хема ведущего моста, подвижный элемент положении, соответствующем режиму Дифференциального привода движителей (I Позиция управляющего механизма); на фиг. 2 и 3 - ведущий мост, конкретные примеры Е|ыполнения: на фиг. 4 - положение подвиж- Иого элемента при работе устройства в ре- |)симах сблокированного привода Движителей, торможения и стояночного tppM03a; на фиг. 5 - взаимное положение ч|астей устройства при работе, в режимах х|одоуменьшения, а также при работе с мо- Е)ильными и стационарными агрегатируе- 1Н1ЫМИ машинами; на фиг. 6 - графики з ависимости скорости движения транспор- тйого средства от частоты вращения управ- л|яющего звена дифференциала в режиме хйдоуменьшения (III позиция управляюще- .г|э механизма).
Ведущий мост содержит.межколесный дифференциал 1, корпус 2 которого кинематически связан с двигателем 3. В корпусе 2 установлены саттелиты 4, находящиеся в з|ацеплении с полуосевыми шестернями 5 и 6 Полуоси 7 и 8 кинематически связаны с движителями 9. Мост снабжен управляющим механизмом 10. который кинематически связан с подвижным элементом 11. Последний установлен на одной из полуосей (например, на полуоси 8, расположенной со стороны полуосевой шестерни 6) и связан с ней посредством зубчатого соединения 12. Полуосевая шестерня 6 установлена в корпусе дифференциала 2 с Эозможностью вращения относительно соответствующей ей полуоси 8 и снабжена зубчатым венцом 13, который находится в зацеплении.с ведущим зубчатым колесом 14 гидротормоза 15. Последний состоит из насоса 16 и регулируемого дросселя 17. Полуосевая шестерня 6 снабжена соедини- т 5льными элементами 18, например зубьями внутреннего зацепления, профиль которых соответствует профилю зубьев наружного зацепления 19, выполненных на подвижном элементе 11. Полуось 7 либо жестко закрепленная на ней полуосевая uiec
терня 5 снабжены соединительными элементами 20, например зубьями наружного зацепления, профиль которых соответствует профилю зубьев внутреннего зацепления 5 21 подвижного элемента 11, Управляющий механизм 10 выполнен трехпозиционным и обеспечивает посредством подвижного элемента 11 связь: в I позиции - полуос д 8 с шестерней 6, в II позиции - обеих полуосей 10 7 и 8 с полуосевой шестерней 6 и в III позиции - полуоси 7 с полуосью 8.
Конструктивное выполнение управляющего механизма 10, подвижного элемента 11, форма его связей с полуосями 7 и 8, с 15 полуосевой шестерней 6, а также конструкция гидротормоза 15 и форма его связи с полуосевой шестерней 6 не имеют значения. Предложение может быть реализовано в большинстве существующих конструкций 20 ведущих мостов транспортных средств, содержащих межколесный дифференциал с механизмом его блоки рорки, после их модернизации путчем введения отличительных признаков предлагаемого моста. Оптималь- 25 ный вариант конструкции моста в каждом конкретном случае определяется из условия качественного функционирования его составных частей с одной стороны при минимальных изменениях базовой конструкции 30 (т.е. минимальных затратах на стадии под- , готовки производства) с другой стороны.
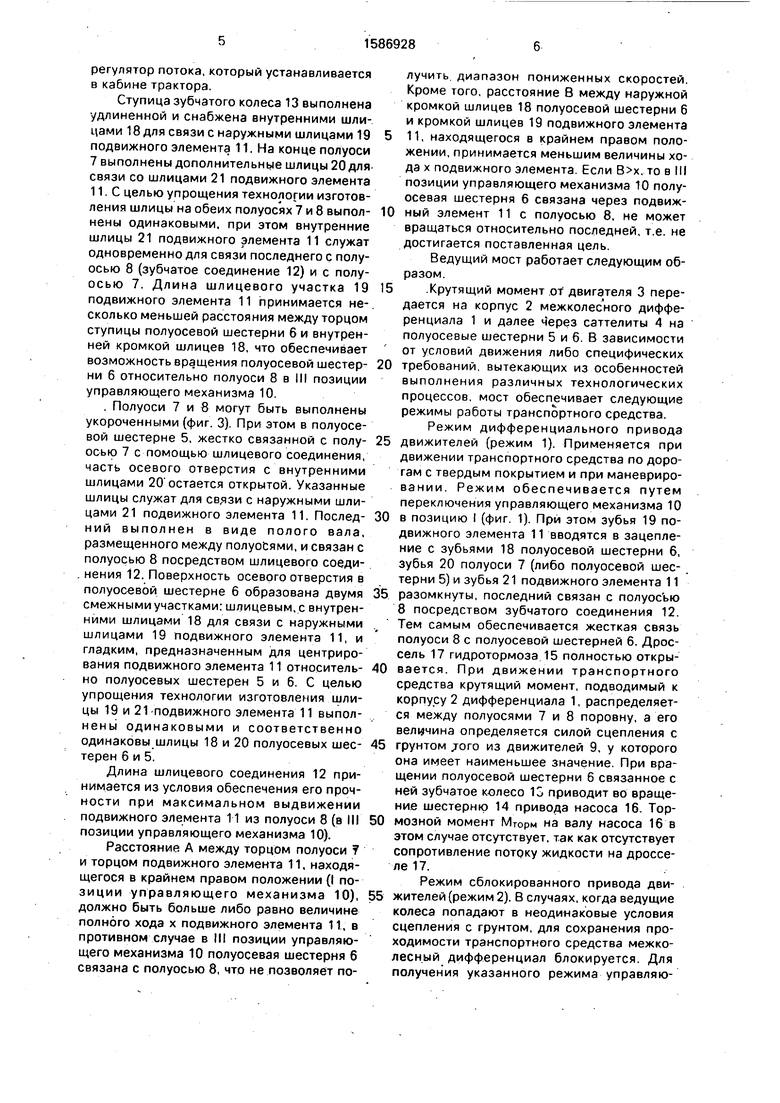
В корпусе 2 межколесного дифференциала установлены полуосевые шестерни 5 и 6 (фиг.. 2), Полуось 7, жестко связанная по- 35 средством шлицевого соединения с полуосевой шестерней 5, выполнена удлиненной и пропущена через центральное отверстие в полуосевой шестерне 6. По- луось 8, расположенная со стороны 40 указанной полуосевой шестерни, вып.олне- , на укороченной и посредством шлицевого соединения 12 связана с подвижным элементом 11, который выполнен в виде шли- цевой полумуфты, приводимой в движение 45 от управляющего механизма (не показан). На ступице полуосевой шестерни 6 закреплено коническое зубчатое колесо 13, находящееся в зацеплении с шестерней 14 привода насоса 16 гидротормоза. Узел при- 50 вода насоса 16 выполнен легкосьемным и крепится на задней стенке корпуса трансмиссии, что обеспечивает п ростоту ремонта и обслуживание указанного узла и требует минимальных конструктивных изменений 55 трансмиссии. В качестве насоса 16 может быть применен шестеренный насос, т.е. идентичный насосу гидравлической системы трактора, что в максимальной степени отвечает требованию унификации узлов, В качестае дросселя 17 может быть применен
регулятор потока, который устанавливается в кабине трактора.
Ступица зубчатого колеса 13 выполнена удлиненной и снабжена внутренними шлицами 18 для связи с наружными шлицами 19 подвижного элемента 11. На конце полуоси 7 выполнены дополнительные шлицы 20 для связи со шлицами 21 подвижного элемента 11. С целью упрощения технологии изготовления шлицы на обеих полуосях 7 и 8 выполнены одинаковыми, при этом внутренние шлицы 21 подвижного элемента 11 служат одновременно для связи последнего с полуосью 8 (зубчатое соединение 12) и с полуосью 7. Длина шлицевого участка 19 подвижного элемента 11 принимается несколько меньшей расстояния между торцом ступицы полуосевой шестерни 6 и внутренней кромкой шлицев 18, что обеспечивает возможность вращения полуосевой шестерни 6 относительно полуоси 8 в III позиции управляющего механизма 10.
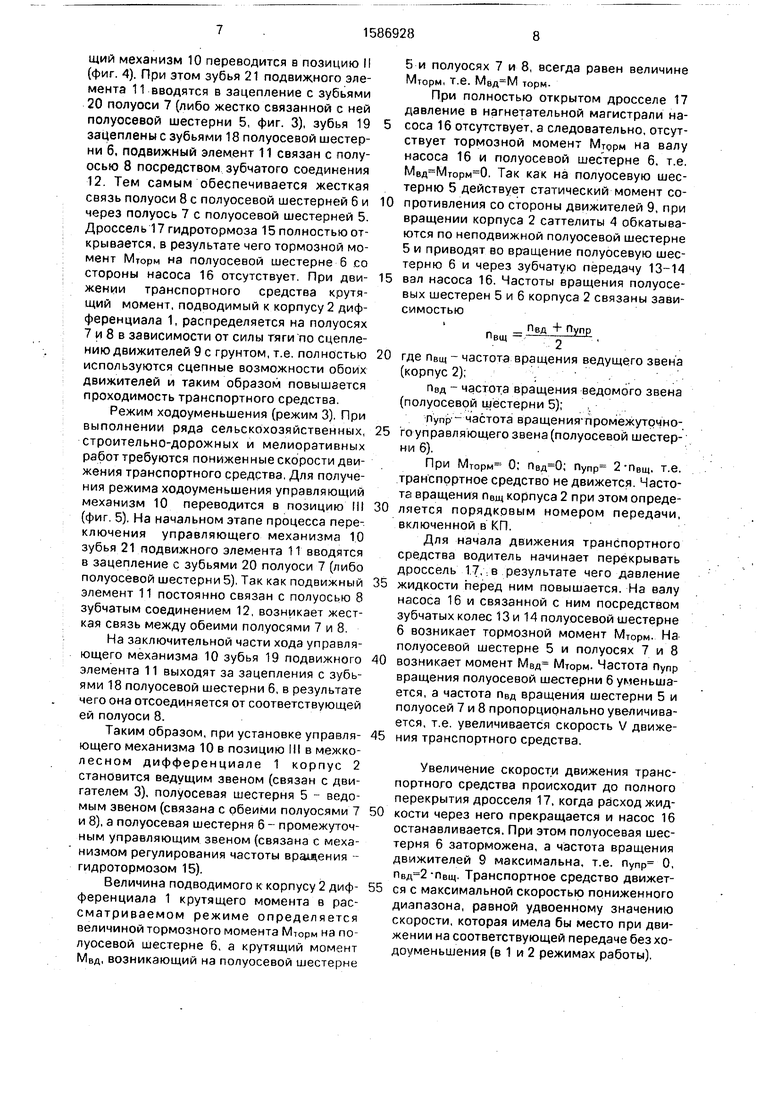
. Полуоси 7 и 8 могут быть выполнены укороченными {фиг. 3). При этом в полуосевой шестерне 5, жестко связанной с полуосью 7 с помощью шлицевого соединения, часть осевого отверстия с внутренними шлицами 20 остается открытой. Указанные шлицы служат для связи с наружными шлицами 21 подвижного элемента 11. Последний выполнен в виде полого вала, размещенного между полуосями, и связан с полуосью 8 посредством шлицевого соеди- . нения 12. Поверхность осевого отверстия в полуосевой шестерне б образована двумя смежными участками: шлицевым, с внутренними шлицами 18 для связи с наружными шлицами 19 подвижного элемента 11, и гладким, предназначенным для центрирования подвижного элемента 11 относительно полуосевых шестерен 5 и 6. С целью упрощения технологии изготовления шлицы 19 и 21 ПОДВИЖНОГО элемента 11 выпол- нень одинаковыми и соответственно одинаковы шлицы 18 и 20 полуосевых шестерен 6 и 5.
Длина шлицевого соединения 12 принимается из условия обеспечения его прочности при максимальном выдвижении подвижного элемента 11 из полуоси 8 (в III позиции управляющего механизма 10).
Расстояние А между торцом полуоси 7 и торцом подвижного элемента 11, находящегося в крайнем правом положении {I позиции управляющего механизма 10), должно быть больше либо равно величине полного хода х подвижного элемента 11, в противном случае в III позиции управляющего механизма 10 полуосевая шестерня б связана с полуосью 8, что не позволяет получить, диапазон пониженных скоростей. Кроме того, расстояние В между наружной кромкой шлицев 18 полуосевой шестерни б и кромкой шлицев 19 подвижного элемента 5 11, находящегося в крайнем правом положении, принимается меньшим величины хода X подвижного элемента. Если . то в III позиции управляющего механизма 10 полуосевая шестерня 6 связана через подвиж- 10 ный элемент 11 с полуосью 8, не может вращаться относительно последней, т.е. не достигается поставленная цель.
Ведущий мост работает следующим образом.
15 .Крутящий момент от двигателя 3 передается на корпус 2 межколесного дифференциала 1 и далее через саттелиты 4 на полуосевые шестерни 5 и б. В зависимости от условий движения либо специфических 20 требований, вытекающих из особенностей выполнения различных технологических процессов, мост обеспечивает следующие режимы работы транспортного средства.
Режим дифференциального привода 25 движителей (режим 1). Применяется при движении транспортного средства по дорогам с твердым покрытием и при маневрировании. Режим обеспечивается путем переключения управляющего механизма 10 30 в позицию I (фиг. 1). При этом зубья 19 подвижного элемента 11 вводятся в зацепление с зубьями 18 полуосевой шестерни б, зубья 20 полуоси 7 (либо полуосевой шес- терни 5) и зубья 21 подвижного элемента 11 5 разомкнуты, последний связан с полуосью 8 посредством зубчатого соединения 12. Тем самым обеспечивается жесткая связь полуоси 8 с полуосевой шестерней 6. Дроссель 17 гидротормоза 15 полностью откры- 0 вается. При движении транспортного средства крутящий момент, подводимый к корпусу 2 дифференциала 1, распределяется между полуосями 7 и 8 поровну, а его величина определяется силой сцепления с 5 грунтом joro из движителей 9, у которого она имеет наименьшее значение. При вращении полуосевой шестерни б связанное с ней зубчатое колесо 13 приводит во вращение шестерню 14 привода насоса 16. Тор- 0 мозной момент Мшрм на валу насоса 16 в этом случае отсутствует, так как отсутствует сопротивление потдку жидкости на дросселе 17.
Режим сблокированного привода дви- 5 жителей (режим 2). В случаях, когда ведущие колеса попадают в неодинаковые условия сцепления с грунтом, для сохранения проходимости транспортного средства межколесный дифференциал блокируется. Для получения указанного режима управляющий механизм 10 переводится в позицию I (фиг. 4). При этом зубья 21 подви кного элемента 11 вводятся в зацепление с зубьями 20 полуоси 7 (либо жестко связанной с ней полуосевой шестерни 5, фиг. 3), зубья 19 зацеплены с зубьями 18 полуосевой шестерни 6, подвижный элекент 11 связан с полуосью 8 посредством зубчатого соединения 12. Тем самым обеспечивается жесткая связь полуоси В с полуосевой шестерней 6 и через полуось 7 с полуосевой шестерней 5. Дроссель 17 гидротормоза 15 полностью открывается, в результате чего тормозной момент Мторм на полуосевой шестерне 6 со стороны насоса 16 отсутствует. При движении транспортного средства крутящий момент, подводимый к корпусу 2 дифференциала 1, распределяется на полуосях 7 и 8 в зависимости от силы тяги по сцеплению движителей 9 с грунтом, т.е. полностью используются сцепные возможности обоих движителей и таким образом повышается проходимость транспортного средства.
Режим ходоуменьшения (режим 3). При выполнении ряда сельскохозяйственных, строительно-дорожных и мелиоративных работ требуются пониженные скорости движения транспортного средства, Для получения режима ходоуменьшения управляющий механизм 10 переводится в позицию III (фиг. 5). На начальном этапе процесса пере-, ключения управляющего механизма 10 зубья 21 подвижного элемента 11 вводятся в зацепление с зубьями 20 полуоси 7 (либо полуосевой шестерни 5). Так как подвижный элемент 11 постоянно связан с полуосью 8 зубчатым соединением 12, возникает жесткая связь между обеими полуосями 7 и 8.
На заключительной части хода управляющего механизма 10 зубья 19 подвижного элемента 11 выходят за зацепления с зубьями 18 полуосевой шестерни 6, в результате чего она отсоединяется от соответствующей ей полуоси 8.
Таким образом, при установке управляющего механизма 10 в позицию III в межколесном дифференциале 1 корпус 2 становится ведущим звеном (связан с двигателем 3), полуосевая шестерня 5 - ведомым звеном (связана с обеими полуосями 7 и 8), а полуосевая шестерня 6 - промежуточным управляющим звеном (связана с механизмом регулирования частоты вращения - гидротормозом 15).
Величина подводимого к корпусу 2 дифференциала 1 крутящего момента в рассматриваемом режиме определяется величиной тормозного момента Мторм на полуосевой шестерне 6, а крутящий момент Мвд, возникающий на полуосевой шестерне
5 и полуосях 7 и 8, всегда равен величине Мторм, Т.е. торм.
При полностью открытом дросселе 17 давление в нагнетательной магистрали наcoca 16 отсутствует, а следовательно, отсутствует тормозной момент Мтррм на валу насоса 16 и полуосевой шестерне 6. т.е. Мвд Мторм 0. Так как на полуосевую шестерню 5 действует статический момент сопротивления со стороны движителей 9, при вращении корпуса 2 саттелиты 4 обкатываются по неподвижной полуосевой шестерне 5 и приводят во вращение полуосевую шестерню 6 и через зубчатую передачу 13-14
вал насоса 16. Частоты вращения полуосевых шестерен 5 и 6 корпуса 2 связаны зависимостью
ПБЩ
РВД + Пупр
20 где Пвщ - частота вращения ведущего звена (корпус 2);V .
Пед - частота вращения ведомого звена (полуосевой шестерни 5);
Пуп|э-- частота вращения-промежуточно- 25 гоуправляющего звена (полуосевой шестерни 6)..
При Мторм 0; Пупр 2 -Пвщ, т.е. транспрртное средство не движется. Частота вращения Пвж корпуса 2 при этом опреде30 ляется порядковым номером передачи, включенной в КП.
Для начала движения транспортного средства водитель начинает перекрывать дроссель 1.7,; в результате чего давление
35 жидкости перед ним повышается. На валу насоса 16 и связанной с ним посредством зубчатых колес 13 и 14 полуосевой шестерне 6 возникает тормозной момент Мторм На полуосевой шестерне 5 и полуосях 7 и 8
0 возникает момент Мвд Мторм. Частота Пупр вращения полуосевой шестерни 6 уменьшается, а частота Пвд вращения шестерни 5 и полуосей 7 и 8 пропорционально увеличивается, т.е. увеличивается скорость V движе5 ния транспортного средства.
Увеличение скорости движения транспортного средства происходит до полного перекрытия дросселя 17, когда расход жид0 кости через него прекращается и насос 16 останавливается. При этом полуосевая шестерня 6 заторможена, а частота вращения движителей 9 максимальна, т.е. Пупр О, -Пвщ. Транспортное средство движет5 ся с максимальной скоростью пониженного диапазона, равной удвоенному значению скорости, которая имела бы место при движении на соответствующей передаче без ходоуменьшения (в 1 и 2 режимах работы).
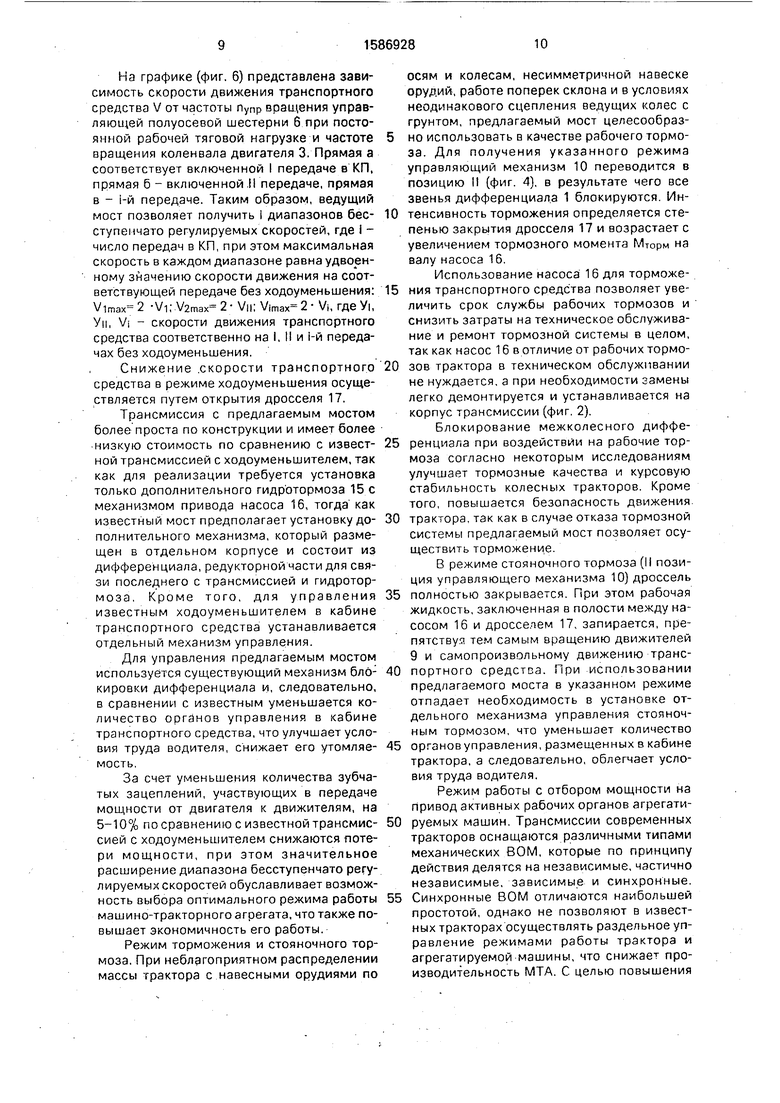
На графике (фиг. 6) представлена зависимость скорости движения транспортного средства V от частоты Пупр вращения управляющей полуосевой шестерни 6 при постоянной рабочей тяговой нагрузке и частоте вращения коленвала двигателя 3. Прямая а соответствует включенной I передаче в КП. прямая б - включенной .11 передаче, прямая в - i-й передаче. Таким образом, ведущий мост позволяет получить 1 диапазонов бесступенчато регулируемых скоростей, где I - число передач в КП, при этом максимальная скорость в каждом диапазоне равна удвоенному значению скорости движения на соответствующей передаче без ходоуменьшения:
Vimax 2 -Vi; V2max 2 Vli; Vimax 2 Vi, ГДе У|,
У||, Vj - скорости движения транспортного средства соответственно на 1, II и 1-й передачах без ходоуменьшения.
Снижение .скорости транспортного средства в режиме ходоуменьшения осуществляется путем открытия дросселя 17.
Трансмиссия с предлагаемым мостом более проста по конструкции и имеет более низкую стоимость по сравнению с известной трансмиссией с ходоуменьшителем, так как для реализации требуется установка только дополнительного гидротормоза 15 с механизмом привода насоса 16, тогда как известный мост предполагает установку дополнительного механизма, который размещен в отдельном корпусе и состоит из дифференциала, редукторной части для связи последнего с трансмиссией и гидротормоза. Кроме того, для управления известным ходоуменьшителем в кабине транспортного средства устанавливается отдельный механизм управления.
Для управления предлагаемым мостом используется существующий механизм блокировки дифференциала и, следовательно, в сравнении с известным уменьшается количество оргйнов управления в кабине транспортного средства, что улучшает условия труда водителя, снижает его утомляемость.
За счет уменьшения количества зубчатых зацеплений, участвующих в передаче мощности от двигателя к движителям, на 5-10% по сравнению с известной трансмиссией с ходоуменьшителем снижаются потери мощности, при зтом значительное расширение диапазона бесступенчато регулируемых скоростей обуславливает возможность выбора оптимального режима работы машино-тракторного агрегата, что также повышает экономичность его работы.
Режим торможения и стояночного тормоза. При неблагоприятном распределении массы трактора с навесными орудиями по
осям и колесам, несимметричной навеске орудий, работе поперек склона и в условиях неодинакового сцепления ведущих колес с грунтом, предлагаемый мост целесообразно использовать в качестве рабочего тормоза. Для получения указанного режима управляющий механизм 10 переводится в позицию II (фиг. 4). в результате чего все звенья дифференциала 1 блокируются. Ин0 тенсивность торможения определяется степенью закрытия дросселя 17 и возрастает с увеличением тормозного момента Мторм на валу насоса 16.
Использование насоса 16 для торможе5 ния транспортного средства позволяет увеличить срок службы рабочих тормозов и снизить затраты на техническое обслуживание и ремонт тормозной системы в целом, так как насос 16 в отличие от рабочих тормо0 зов трактора в техническом обслуживании не нуждается, а при необходимости замены легко демонтируется и устанавливается на корпус трансмиссии (фиг. 2).
Блокирование межколесного диффе5 ренциала при воздействии на рабочие тормоза согласно некоторым исследованиям улучшает тормозные качества и курсовую стабильность колесных тракторов. Кроме того, повышается безопасность движения.
0 трактора, так как в случае отказа тормозной системы предлагаемый мост позволяет осуществить торможенце.
В режиме стояночного тормоза (II позиция управляющего механизма 10) дроссель
5 полностью закрывается. При этом рабочая жидкость, заключенная в полости между насосом 16 и дросселем 17, запирается, пре- пятству п тем самым вращению движителей 9 и самопроизвольному движению транс0 портного средства. При использовании предлагаемого моста в указанном режиме отпадает необходимость в установке отдельного механизма управления стояночным тормозом, что уменьшает количество
5 органов управления, размещенных в кабине трактора, а следовательно, облегчает условия труда водителя.
Режим работы с отбором мощности на Привод активных рабочих органов агрегати0 руемых машин. Трансмиссии современных тракторов оснащаются различными типами механических ВОМ, которые по принципу действия делятся на независимые, частично независимые, зависимые и синхронные.
5 Синхронные ВОМ отличаются наибольшей простотой, однако не позволяют в известных тракторах осуществлять раздельное управление режимами работы трактора и агрегатируемой машины, что снижает производительность МТА. С целью повышения
эффективности его работы современные трактора оснащаются независимыми и полунезависимыми ВОМ, имеющими сложную конструкцию привода и автономных механизмов управления. Предлагаемый мост по- зволлет повысить эффективность работы МТА более простыми средствами.
При движении самоходного шасси в 1 и 2 режимах ( и II позиции управляющего механизма 10) частота вращения Пвом синхронного-Вом определяется включенной в КП передачей, пропорциональна скорости движения и регулировке не поддается. При включении И позиции управляющего механизма 10 (фиг. 5), скорость V движения шасси бесступенчато регулируется в семи диапазонах. При этом одному и тому же значению скорости движения V соответствует семь значений частоты вращения пвом синхронного ВОМ. В общем случае предлагаемый мост при заданной скорости движения V3 транспортного средства позволяет получить I значений частоты вращения пвом синхронного ВОМ, где i - число передач в КП. На графике (фиг. 6) п вомг частота вращения синхронного ВОМ на i передаче в КП, п воМ|Г передаче, п вом| З i-й передаче. Аналогично при работе трактора со стационарными машинами и орудиями можно получить i значений частоты вращения пвом синхронного ВОМ. Для этого управляющий механизм 10 переключается в позицию II, а дроссель 17 полностью открывается, в результате чего вращение от КП на движители не передается, а частота вращения пвом синхронного ВОМ изменяется путем переключения передач.
Таким рбразом, предлагаемый мост позволяет-использовать синхронные ВОМ, приводимые во вращение от любого вала КП, в качестве независимых ВОМ и при этом в отличие от известных систем отбора мощности, которые выполняются одно-двухско- ростными, позволяет получить значительно больше частот их вращения, что повышает эффективность работы МТА, Кроме того, для
получения различных частот вращения ВОМ не требуется отдельный механизм управления, а используе Шя рычаг и механизм переключения передач, что облегчает условия труда водителя.
Формула изобретения
Ведущий мост транспортного средства, содержащий установленный в партере моста межколесный дифференциал, корпус которого кинематически связан с двигателем
и посредством саттелитов с полуосевь1ми шестернями, полуоси движителей и связанный с одной из полуосей и с управляющим механизмом подвижный элемент, отличающийся тем, что, с целью повышения
эффективности за счет обеспечения возможности получения бесступенчато регулируемых пониженных скоростей движения транспортного средства, он снабжен регулируемым тормозным устройством, полуосевая шестерня, расположенная со стороны, связанной с подвижным элементом полуоси, установлена с возможностью вращения относительно последней, связана с указанным тормозным устройством и
снабжена соединительными элементами для связи с подвижным элементом, вторая полуось либо жестко связанная с ней полуосевая шестерня снабжены дополнительными соединительными элементами для связи
с подвижным элементом, причем управляющий механизм выполнен трехпозиционным, обеспечивающим посредством подвижного элемента связь в первой позиции полуосевой шестерни, связанной с гидротормозом,
с соответствующей ей полуосью, во второй позиции - обеих полуосей с указанной шестерней, в третьей позиции - обеих полуосей.
i
хп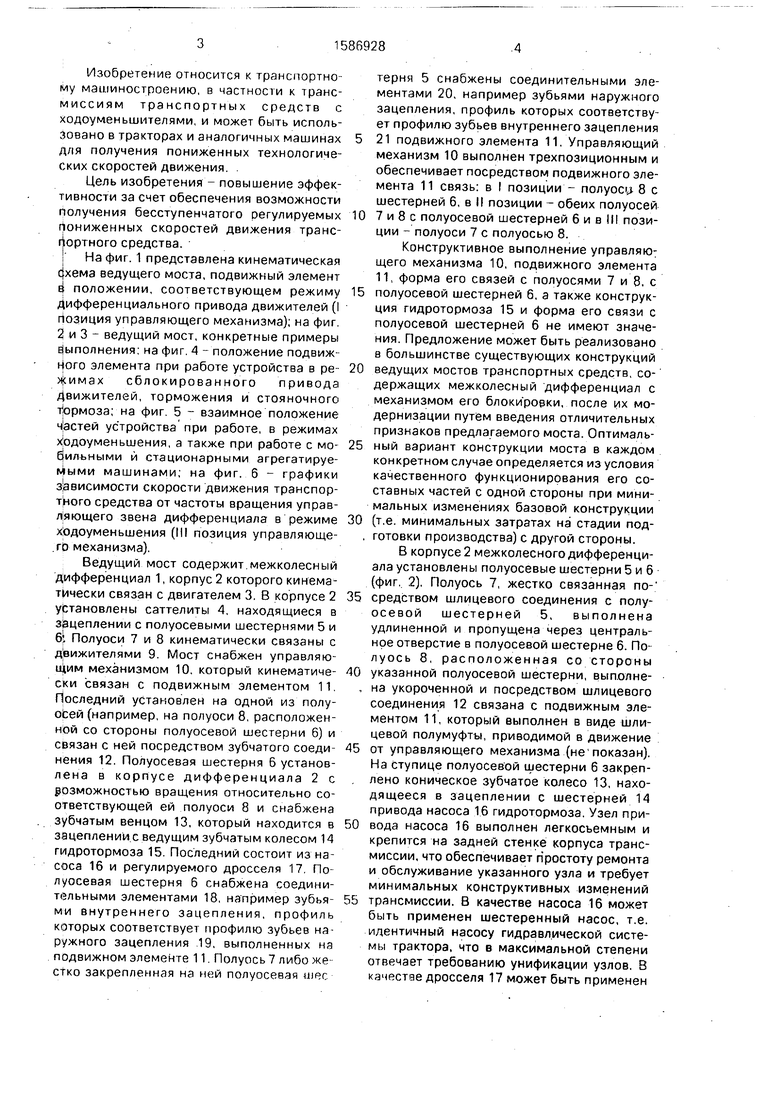

| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий мост транспортного средства | 1989 |
|
SU1699824A2 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
| Ведущий мост транспортного средства | 1989 |
|
SU1703519A2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2029901C1 |
| РЕДУКТОР СРЕДНЕГО МОСТА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2397389C2 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044942C1 |
| Проходная главная передача | 2018 |
|
RU2693433C1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО ПОВОРОТА ТРАНСПОРТНОЙ МАШИНЫ (ВАРИАНТЫ) | 2002 |
|
RU2224677C1 |
Изобретение относится к трансмиссиям транспортных средств с ходоуменьшителями. Цель изобретения - повышение эффективности за счет обеспечения возможности получения бесступенчато регулируемых пониженных скоростей движения транспортного средства. В качестве ходоуменьшителя используются межколесный дифференциал 1, в корпусе 2 которого размещены полуосевые шестерни /ПШ/ 3 и 4, полуоси 5 и 6, постоянно связанный с полуосью 6 подвижный элемент /ПЭ/ 7, выполняющий в известных конструкциях функцию блокировки дифференциала 1, и управляющий механизм 8. ПШ 4 установлена с возможностью вращения относительно соответствующей ей полуоси 6, связана с гидротормозом 9 и снабжена соединительными элементами /СЭ/ 10 для связи с СЭ 11 ПЭ 7. Полуось 5 снабжена СЭ 12 для связи с СЭ 13 ПЭ 7, а управляющий механизм 8 выполнен трехпозиционным. Для получения диапазона пониженных скоростей управляющий механизм 8 переключается в третью позицию. При этом СЭ 12 полуоси 5 зацепляется с СЭ ПЭ 7, в результате чего возникает жесткая связь между полуосями 5 и 6. При этом СЭ 10 ПШ 4 выходят из зацепления с СЭ 11 ПЭ 7, в результате чего ПШ 4 отсоединяется от полуоси 6. Частота вращения ПШ 4 регулируется гидротормозом 9, при этом частота вращения ПШ 3 и полуосей 5 и 6 изменяется от нуля (при отсутствии тормозного момента на ПШ 4) до удвоенной частоты вращения корпуса 2 дифференциала 1 (при полностью заторможенной ПШ 4). 6 ил.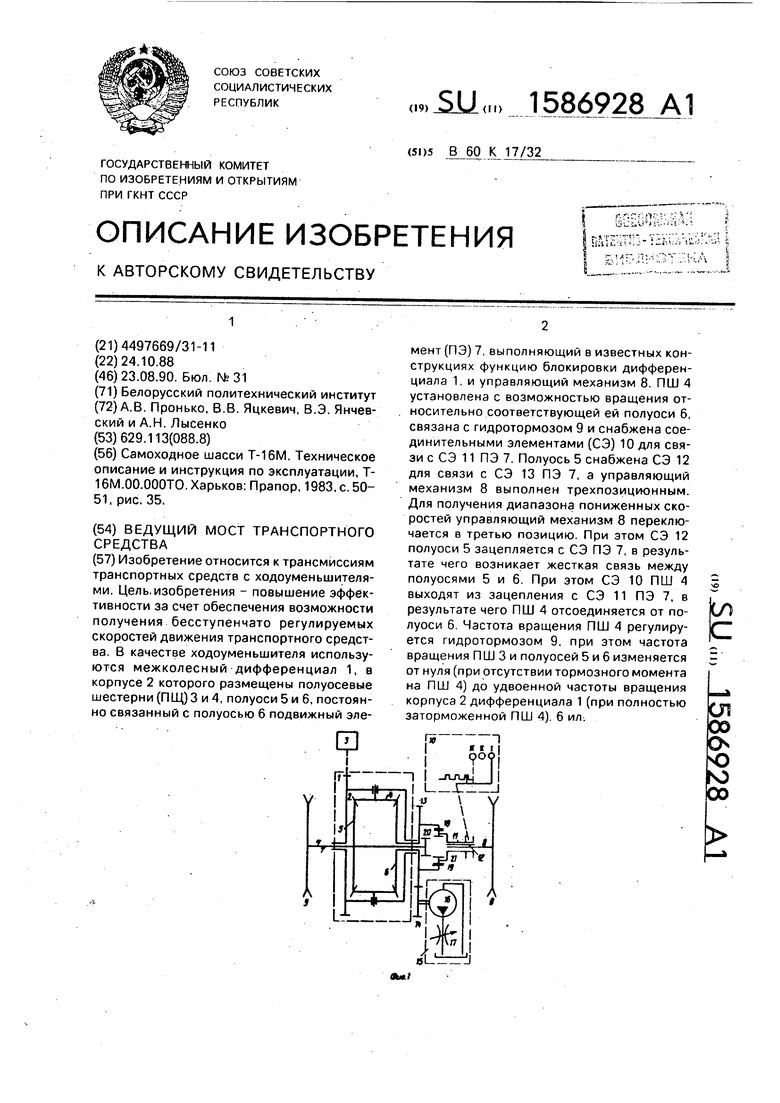
V
eu
вЗ
X
(Й/г.
«
-/
ш V
I
21 , fi -/ff
о
- вщ1 вшп
Фиг.6
п
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Техническое описание и инструкция по эксплуатации, Т- 16М.ОО.ОООТО | |||
| Харьков: Прапор, 1983, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
