lib
ч
Ё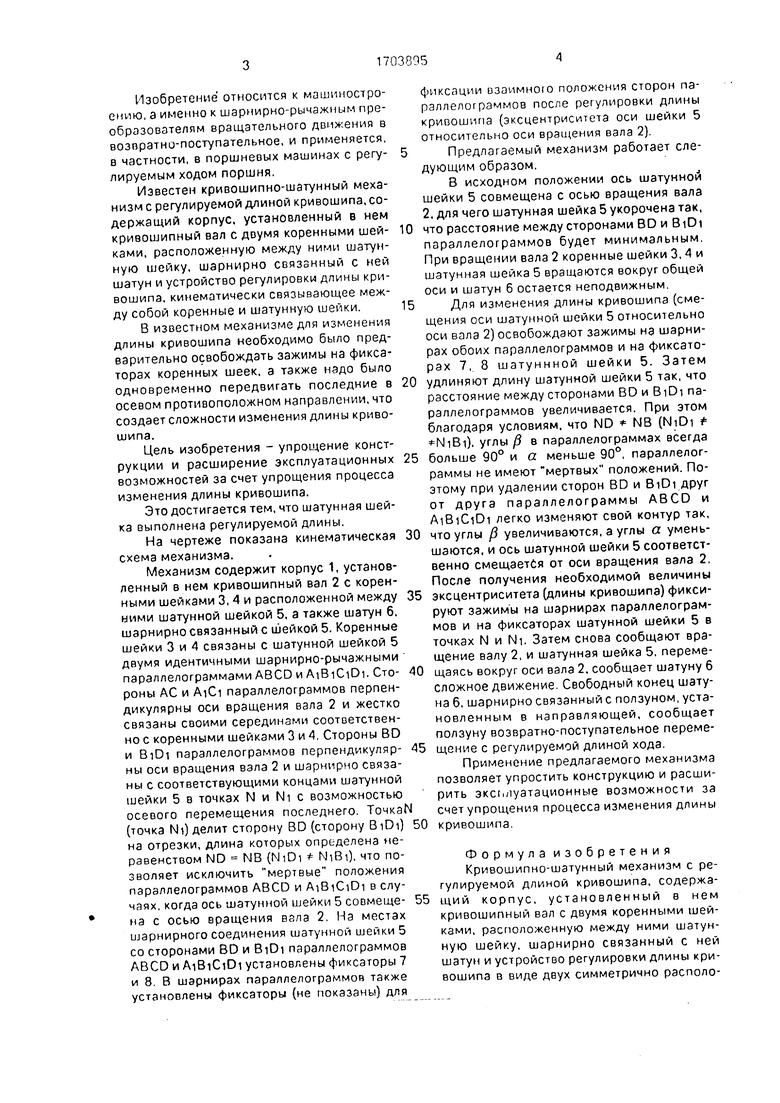
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1988 |
|
SU1587281A1 |
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1990 |
|
SU1803653A1 |
| Роторный измельчитель | 1988 |
|
SU1607733A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| Кривошипно-ползунный механизм | 1987 |
|
SU1414961A1 |
| Режущий аппарат к сельскохозяйственным уборочным машинам | 1986 |
|
SU1393346A1 |
| Оппозитный кривошипно-шатунный механизм | 2023 |
|
RU2820580C1 |
| Регулируемый кривошипно-ползунный механизм | 1982 |
|
SU1073516A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 1996 |
|
RU2108486C1 |
Изобретение относится к машиностроению и может быть использовано в поршневых механизмах с регулируемым ходом поршня. Цель изобретения - упрощение конструкции и расширение эксплуатационных возможностей за счет упрощения изменения длины кривошипа. При вращении кривошипного вала 2 движение посредством шатуна 6 передается на ползун, который совершает возвратно-поступательное движение. Регулирование хода ползуна осуществляется за счет изменения длины шатунной шейки 5, которое осуществляется при освобожденных фиксаторах 7 и 8. 1 ил.
41
О W
со о ел
Изобретение относится к машиностроению, а именно к шарнирно-рычажным преобразователям вращательного движения в возвратно-поступательное, и применяется, в частности, в поршневых машинах с регу- лируемым ходом поршня,
Известен кривошипно-шатунный механизм с регулируемой длиной кривошипа, содержащий корпус, установленный в нем кривошипный вал с двумя коренными шей- хами, расположенную между ними шатунную шейку, шарнирно связанный с ней шатун и устройство регулировки длины кривошипа, кинематически связывающее между собой коренные и шатунную шейки.
В известном механизме для изменения длины кривошипа необходимо было предварительно освобождать зажимы на фиксаторах коренных шеек, а также надо было одновременно передвигать последние в осевом противоположном направлении, что создает сложности изменения длины кривошипа.
Цель изобретения - упрощение конструкции и расширение эксплуатационных возможностей за счет упрощения процесса изменения длины кривошипа.
Это достигается тем, что шатунная шейка выполнена регулируемой длины.
На чертеже показана кинематическая схема механизма.
Механизм содержит корпус 1, установленный в нем кривошипный вал 2 с коренными шейками 3,4 и расположенной между ними шатунной шейкой 5, а также шатун 6, шарнирно связанный с шейкой 5. Коренные шейки 3 и 4 связаны с шатунной шейкой 5 двумя идентичными шарнирно-рычажными параллелограммами ABCD и AiBiCiDi. Сто- роны АС и Aid параллелограммов перпендикулярны оси вращения вала 2 и жестко связаны своими серединами соответственно с коренными шейками 3 и 4. Стороны BD и BiDi параллелограммов перпендикуляр- ны оси вращения вала 2 и шарнирно связаны с соответствующими концами шатунной шейки 5 в точках N и NI с возможностью осевого перемещения последнего. To4Ka (точка NI) делит сторону BD (сторону В iDi) на отрезки, длина которых определена неравенством ND NB (NiDi N161), что позволяет исключить мертвые положения параллелограммов ABCD и AiBiCiDi в случаях, когда ось шатунной шейки 5 совмеще- на с осью вращения вала 2. На местах шарнирного соединения шатунной шейки 5 со сторонами BD и BiDi параллелограммов ABCD и AiBiCiDi установлены фиксаторы 7 и 8. В шарнирах параллелограммов также установлены фиксаторы (не показаны) для
фиксации взаимного положения сторон параллелограммов после регулировки длины криоошипа (эксцентриситета оси шейки 5 относительно оси вращения вала 2).
Предлагаемый механизм работает следующим образом.
В исходном положении ось шатунной шейки 5 совмещена с осью вращения вала 2, для чего шатунная шейка 5 укорочена так, что расстояние между сторонами BD и BiDi параллелограммов будет минимальным. При вращении вала 2 коренные шейки 3, 4 и шатунная шейка 5 вращаются вокруг общей оси и шатун 6 остается неподвижным.
Для изменения длины кривошипа (смещения оси шатунной шейки 5 относительно оси вала 2) освобождают зажимы на шарнирах обоих параллелограммов и на фиксаторах 7, 8 шатуннной шейки 5. Затем удлиняют длину шатунной шейки 5 так, что расстояние между сторонами BD и BiDi параллелограммов увеличивается. При этом благодаря условиям, что ND NB (NiDi t NiBi), углы / в параллелограммах всегда больше 90° и а меньше 90°, параллелограммы не имеют мертвых положений. Поэтому при удалении сторон BD и BiDi друг от друга параллелограммы ABCD и AiBiCiDi легко изменяют свой контур так, что углы /3 увеличиваются, а углы а уменьшаются, и ось шатунной шейки 5 соответственно смещается от оси вращения вала 2, После получения необходимой величины эксцентриситета (длины кривошипа) фиксируют зажимы на шарнирах параллелограммов и на фиксаторах шатунной шейки 5 в точках N и NL Затем снова сообщают вращение валу 2, и шатунная шейка 5, перемещаясь вокруг оси вала 2, сообщает шатуну 6 сложное движение. Свободный конец шатуна 6, шарнирно связанный с ползуном, установленным в направляющей, сообщает ползуну возвратно-поступательное перемещение с регулируемой длиной хода.
Применение предлагаемого механизма позволяет упростить конструкцию и расширить эксплуатационные возможности за счет упрощения процесса изменения длины кривошипа.
Формула изобретения Кривошипно-шатунный механизм с регулируемой длиной кривошипа, содержащий корпус, установленный в нем кривошипный вал с двумя коренными шейками, расположенную между ними шатунную шейку, шарнирно связанный с ней шатун и устройство регулировки длины кривошипа в виде двух симметрично располо51703895 6
женных по обе стороны шатунной шейкиплуэтэционных возможностей за счет упшэрнирно-рычэжных параллелограммов,рощения изменения длины кривошипа,
отличающийся тем, что, с цельюшатунная шейка выполнена регулируемой
упрощения конструкции и расширения экс-длины.
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1988 |
|
SU1587281A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
