Изобретение относится к машиностроению, а именно к кривошипно-ползунным преобразователям вращательного движения Б возвратно-поступательное и наоборот, и найдет применение, в частности, в двигателях внутреннего сгорания.
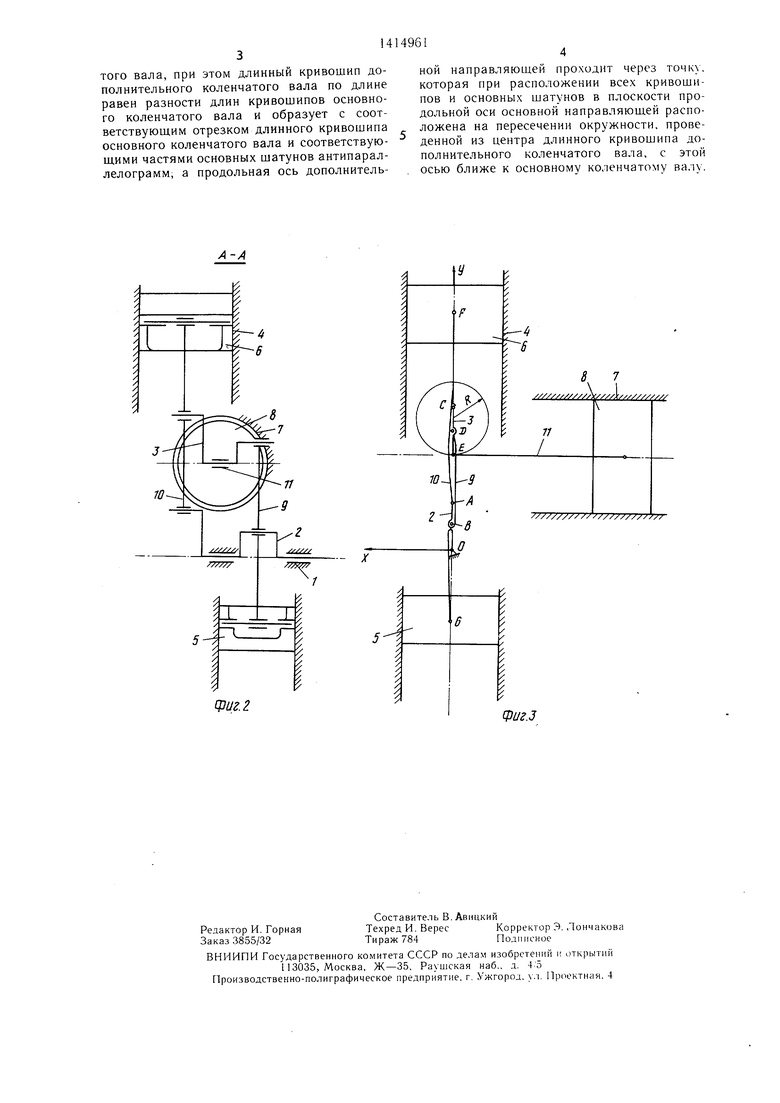
Цель изобретения - повышение долговечности механизма за счет уменьшения боковых усилий на стенки направляющих и соответствующего уменьшения сил трения. На фиг. 1 показана кинематическая схема предлагаемого механизма; на фиг. 2 - сечение Л-А на фиг. 1; на фиг. 3 - расчетная схема для определения расположения продольной оси дополнительной прямолинейной направляющей.
Механизм содержит основание 1, уста- 1 новленный на нем основной коленчатый вал 2 I с коротким ОВ и длинным ОА кривоши- I пами, дополнительный коленчатый вал 3 с I коротким DE и длинным DC кривошипами, основную прямолинейную направляющую 4, продольная ось которой пересечена с осью I вращения основного коленчатого вала 2, установленные в направляющей 4 основные ползуны 5 и 6, дополнительную направ- ; ляющую 7, перпендикулярную основной на- правляющей 4, и установленный в направ- I ляющей 7 дополнительный ползун 8. Пер- : вый основной щатун 9, связанный с основ- ным ползуном 5 через шарнир G, через шар- : нир В связывает этот ползун с коротким I кривошипом ОВ основного коленчатого ва- ла 2 и через шарнир D с коренной шейкой I дополнительного коленчатого вала 3. Второй I основной шатун 10 связанный с основным I ползуном 6 через шарнир F, через шарнир С I связывает этот ползун с длинным кривоши- : пом DC дополнительного коленчатого вала 4 и через шарнир А с длинным кривошипом ОА : основного коленчатого вала 2. : кривошип DC коленчатого вала 3, отре- ; зок АВ кривошипа ОА и связанные с ними отрезок АС шатуна 10 и отрезок BD щату- на 9 образуют антипараллелограмм, откуда следует, что и .
Для определения положения продольной оси дополнительной прямолинейной направляющей 7 совмещают все кривощипы и основные шатуны 9 и 10 с плоскостью продольной оси основной прямолинейной направляющей 4 (фиг. 3). Затем из центра О
кри вошипа ОС радиусом провос
дят окружность. Точка Е пересечения этой окружности с продольной осью направляющей 4, ближняя к основному коленчатому валу 2, и является точкой, через которую должна пройти продольная ось направляющей 7. Эта точка Е определяет длину короткого кривошипа DE, лежащего па продолжении длинного кривощипа DC дополнительного коленчатого вала 3. Дополнительный щатун 11 через П1арниры // и связывает .между собой кривошип DE и допол5
нительный ползун 8. Возможна также жесткая связь шатуна 11 с кривошипом DE и ползуном 8.
Механизм работает следующим образом. При вращении основного коленчатого вала 2 связанные с ним шатуны 9 и 10 через щарниры G к F сообщают ползунам 5 и 6 возвратно-поступательное движение. Одновременно через шарниры Си/) дополнительный коленчатый вал 3 получает
0 сложное движение, в результате которого при указанных соотношениях длин звеньев АВ, DC, АС и BD точка Е кривощипа DE совершает на некотором расстоянии прямолинейное движение вдоль оси прямолинейной
5 направляющей 7. Кривощип DE через щар- нир Е и щатун 11 сообщает возвратно- поступательное движение ползуну 8, при этом боковые усилия на стенки направляющей 7 отсутствуют.
0 Если ползун 8 и направляющую 7 выполнить, например, в виде рабочих цилиндра и поршня порщневой машины, то при рабочем ходе ползуна 8 через шатун 11, дополнительней коленчатый вал 3 и основные шатуны 9 и 10 на основной коленчатый вал 2 передается крутящий момент. При этом ползуны 5 и 6 с направляющей 4 могут выполнять ро-ль как рабочих цилиндров, так и цилиндров наддува или крейцкопфов.
0
Формула изооретения
Кривошипно-ползунный механизм, содержащий основание, установленный на нем коленчатый вал с двумя кривошипами раз5 ной длины, выполненную в основании прямолинейную направляющую, продольная ось которой пересечена с осью вращения коленчатого вала, два ползуна, установленные в направляющей по обе стороны от оси вращения коленчатого вала, и два шатуна,
0 одними концами шарнирно связанные каждый с соответствующим ползуном, отличающийся тем, что, с целью повышения долговечности, в основании выполнена дополнительная прямолинейная направляющая, пер- с пендикулярная основной направляющей, механизм снабжен дополнительным коленчатым валом с двумя кривошипами разной длины, установленным в дополнительной направляющей, дополнительным ползуном и до- полнительнбш шатуном, шарнирно связанQ ными одним концом с дополнительным ползуном, а другим концом - с коротким кривошипом дополнительного коленчатого вала, а основные шатуны другими концами шарнирно связаны первый с коренной шейкой дополнительного коленчатого вала,второй -
5 с длинным кривошипом основного коленчатого вала, и серединами шарнирно связаны первый с коротким кривошипом основного коленчатого вала, а второй - с длинным кривошипом дополнительного коленчатого вала, при этом длинный кривошип дополнительного коленчатого вала по длине равен разности длин кривошипов основного коленчатого вала и образует с соот- ветствуюш,им отрезком длинного кривошипа основного коленчатого вала и соответствующими частями основных шатунов антипараллелограмм, а продольная ось дополнительной направляющей проходит через точку, которая при расположении всех кривошипов и основных шатунов в плоскости продольной оси основной направляющей расположена на пересечении окружности, проведенной из центра длинного кривошипа дополнительного коленчатого вала, с этой осью ближе к основному коленчатому валу.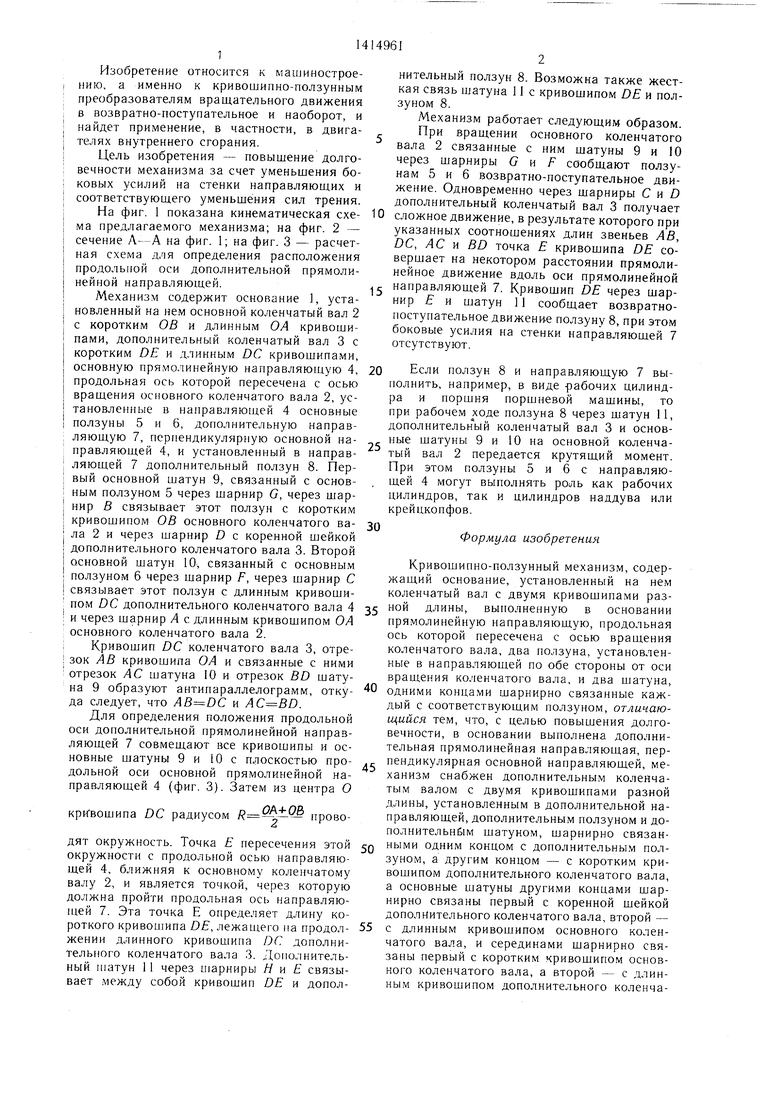
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 1987 |
|
SU1528978A1 |
| Уравновешенный кривошипно-ползунный механизм | 1988 |
|
SU1627769A1 |
| Устройство для преобразования возвратно-поступательного движения во вращательное и наоборот | 1984 |
|
SU1262163A1 |
| Симметричный кривошипно-ползунный механизм | 1985 |
|
SU1270461A1 |
| Кривошипно-ползунный механизм с звеном, движущимся прямолинейно-поступательно | 1988 |
|
SU1605059A1 |
| Лесопильная рама | 1982 |
|
SU1129071A1 |
| Гармонический генератор | 1975 |
|
SU533933A1 |
| Устройство для подачи заготовок в рабочую зону пресса | 1972 |
|
SU444590A1 |
| Механизм для преобразования вращательного движения в винтовое или вращательное | 1986 |
|
SU1373924A1 |
| Кривошипно-кулисный механизм с остановками | 1985 |
|
SU1260610A1 |
Изобретение относится к кривошипно- ползунным преобразователям вращательного движения в возвратно-поступательное и наоборот. Цель изобретения - повышение долговечности механизма за счет уменьшения боковых усилий на стенки направляюш,их и соответствующего уменьшения сил трения. При вращении основного коленчатого вала 2 шатуны 9 и 10 сообщают ползунам 5 и 6 возвратно-поступательное движение в направляющей 4 и одновременно через шарниры С и D сообщают сложное движение дополнительному коленчатому валу 3. При и и точка Е криво- шина DE движется прямолинейно и через шатун 11 сообщает возвратно-поступательное движение ползуну 8, при этом боковые усилия на стенках направляющей 7 отсутствуют. 3 ил. i (Л 4 ;о Од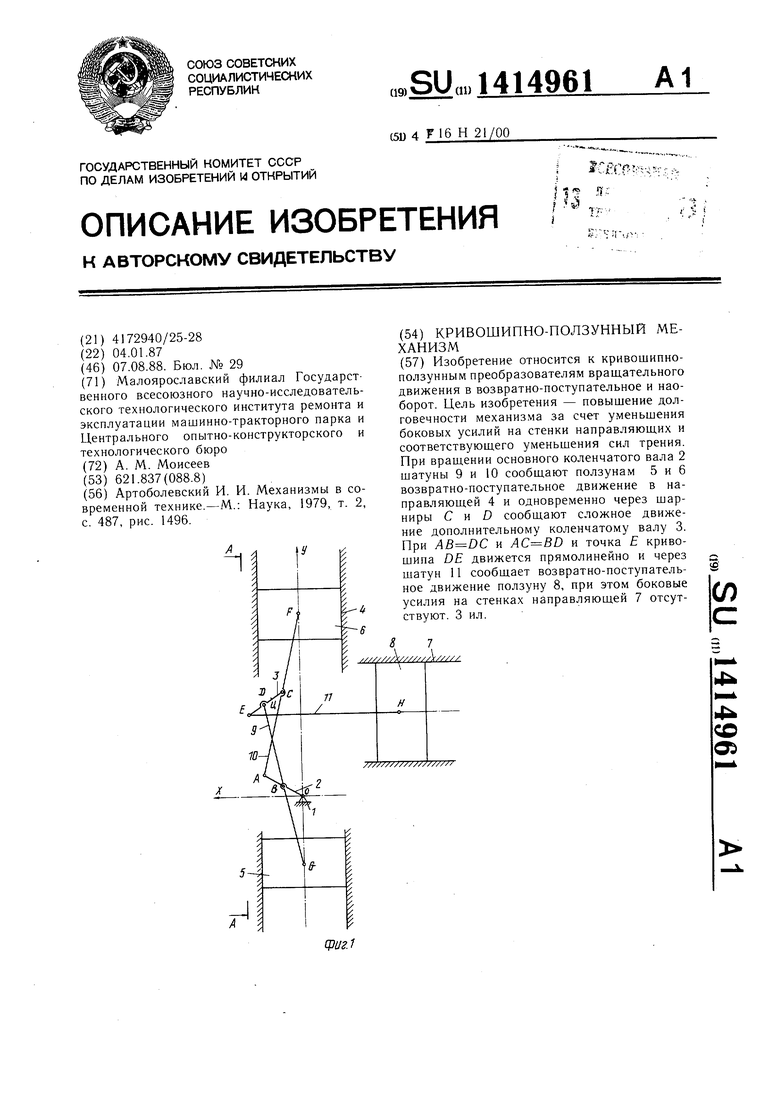
-4 -6
- X
ери г. 2
- в
8 7
////////)//j /X///.
11
10А
д
О
фиг.З
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике.-М.: Наука, 1979, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кренометр | 1923 |
|
SU487A1 |
| Насос для горючей жидкости для двигателей внутреннего горения | 1924 |
|
SU1496A1 |
