Изобретение относится к машиностроению, а именно к кривошипным механизмам с изменяемым в процессе работы радиусом кривошипа.
Известен регулируемый кривошипно-ползунный механизм, содержащий корпус, кривошип, выполненный в виде двух ш.ек, двух опорных и шатунной шеек, установленные в корпусе с возможностью перемеш,ения вдоль оси кривошипа опоры, несушие кривошип, шарнирно соединенный одним концом с последним шатун, шарнирно соединенный с другим концом шатуна ползун и привод, связанный с кривошипом.
В известном механизме щеки образуют упругую часть кривошипа, а радиус кривошипа меняется в зависимости от степени изгиба щек. Степень изгиба регулируется изменением расстояния между подвижными опорами кривошипа 1.
Недостатком известного механизма является его низк.ая несушая способность. При значительной нагрузке гибкий кривошип прогибается в сторону действия нагрузки, а увеличение жесткости кривошипа затрудняет его регулировку.
Цель изобретения - повышение несущей способности механизма.
Указанная цель достигается тем, что в регулируемом кривошипно-ползунном механизме, содержащем корпус, кривошип, выполненный в виде двух шек, двух опорных и шатунной шеек, установленные в корпусе с возможностью перемещения вдоль оси кривошипа опоры, несущие кривошип, щарнирно соединенный одним концом с последним шатун, щарнирно соединенный с другим концом шатуна ползун и привод, связанный с кривошипом, одна из щек щарнирно соединена с щатунной и одной из опорных шейками, а вторая выполнена в виде двух параллельных стержней, шарнирно соединенных с щатунной и второй опорной шейками и образующих с ними шарнирный параллелограмм.
На чертеже показана кинематическая схема механизма.
Механизм состоит из корпуса 1, кривошипа, содержащего опорные шейки 2 и 3, шатунную шейку 4, щеку 5, параллельные стержни 6 и 7, образующие вторую щеку кривошипа. Механизм включает также две подвижные опоры 8 и 9, соединенные винтом 10 с правой и левой резьбой, шатун 11, шарнирно соединенный одним концом с ползуном 12, а другим - с шатунной шейкой 4 кривошипа, и привод 13 с зубчатыми колесами 14 и 15. При необходимости механизм может быть снабжен приводом 16 ходового винта 10.
Механизм работает следующим образом.
Привод 13 с помощью зубчатых колес 14 и 15 приводит во вращение кривошип, шатунная шейка 4 которого приводит в сложное движение шатун 11, а последний сообщает связанному с ним ползуну 12 возвратно-поступательное движение.
При необходимости изменить радиус R кривощипа и, следовательно, величину хода ползуна 12, вручную или с помощью привода 16 приводят во вращение винт 10. При этом расстояние между опорами 8 и 9 уменьшается или увеличивается. Соответственно изменяется угол л ..между осью вращения кривошипа и одним из параллельных стержней 6 или 7, образующих вторую щеку кривошипа. При увеличении угла л ...одновременно увеличивают радиус R кривошипа, и наоборот. Изменение радиуса кривошипа возможно без остановки механизма.
Так как стержни 6 и 7 совместнр с опорной шейкой 3 и шатунной щейкой 4 образуют шарнирный параллелограмм, то при ре гулировке радиуса R кривошипа ось шатунной шейки 4 всегда остается параллельной оси вращения опорных шеек 2 и 3.
Шарнирное соединение между собой опорных и шатунной шеек с помошью щек в виде стержней повышает жесткость и несущую способность механизма, что позволяет применить его в силовых установках.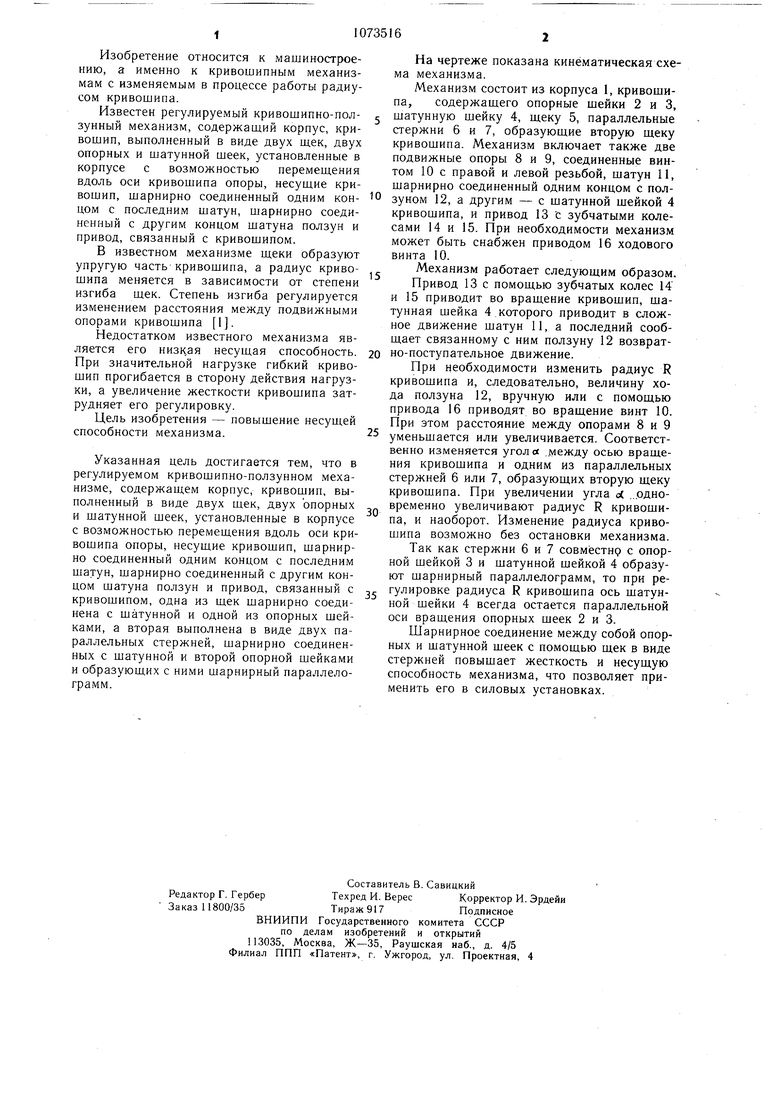
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| УСТРОЙСТВО ИЗМЕНЕНИЯ РАДИУСА КРИВОШИПА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА | 2015 |
|
RU2595993C1 |
| ГИПОЦИКЛОИДНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1997 |
|
RU2139460C1 |
| Штамповочный автомат | 1981 |
|
SU1008007A1 |
| Пресс с кривошипно-круговым исполнительным механизмом | 1981 |
|
SU979169A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ И ОБЪЕМНАЯ МАШИНА, ИСПОЛЬЗУЮЩАЯ ТАКОЙ МЕХАНИЗМ | 2010 |
|
RU2494260C2 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КОРОБОВОЙ ЛИНИИЭЛЛИПСОВ | 1966 |
|
SU187319A1 |
| Движитель транспортного средства | 1972 |
|
SU485899A1 |
| Вытяжной пресс | 1976 |
|
SU952092A3 |
| Шаговый конвейер | 1979 |
|
SU804550A1 |
РЕГУЛИРУЕМЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ, содержащий корпус, кривошип, выполненный в виде двух щек, двух опорных и шатунной шеек, установленные в корпусе с возможностью перемещения вдоль оси кривошипа опоры, несущие кривошип, шарнирно соединенный одним концом с последним шатун, шарнирно соединенный с другим концом шатуна ползун и привод, связанный с кривошипом, отличающийся тем, что, с целью повышения несущей способности, одна из щек шарнирно соединена с шатунной и одной из опорных шейками, а вторая выполнена в виде двух параллельных стержней, шарнирно соединенных с шатунной и второй опорной шейками и образующих с ними шарнирный параллелограмм.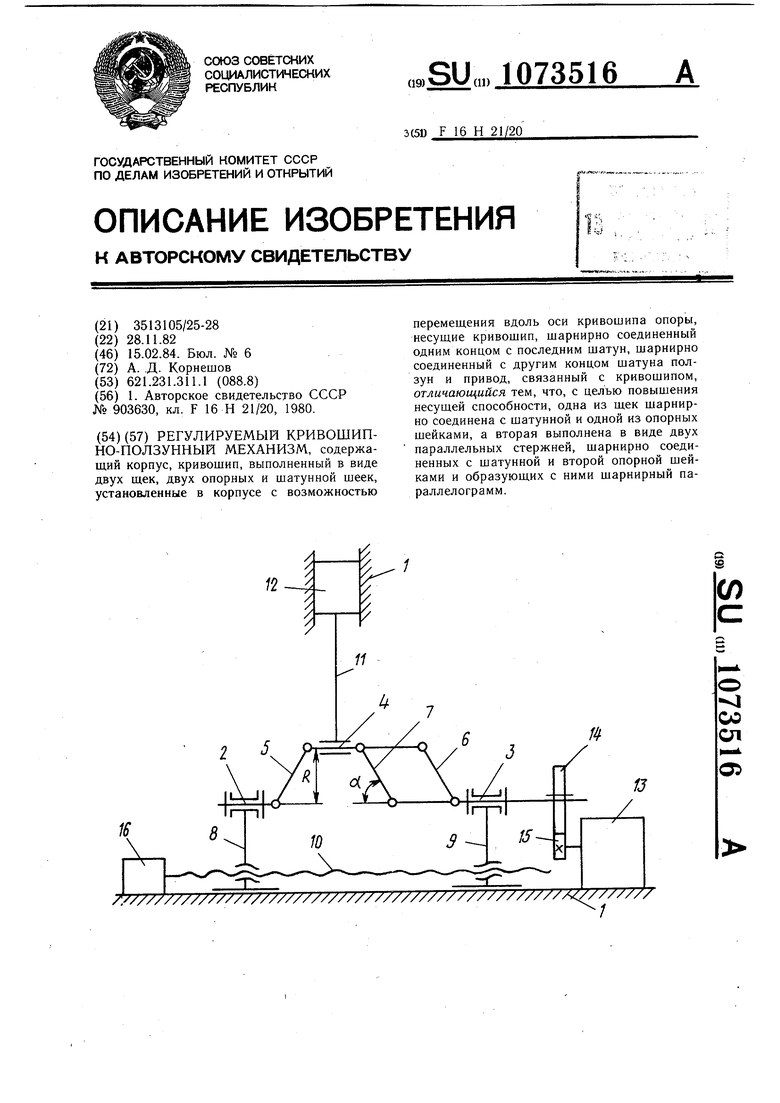
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кривошипно-ползунный механизм | 1980 |
|
SU903630A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
