vi
о
ел
д
00
о
Изобретение относится к судостроению, о частности к конструкции морской голупогружной платформы.
Известны конструкции морских пол- упогружных платформ и полупогружных судов, содержащие корпус с понтонами и стойками и систему динамической стабилизации. Система динамической стабилизации о известных конструкциях оыполнена в виде поворбтных или стационарных дпижительных колонок и оающих устройств типа винт в трубе. Движительные колонки, как правило, устанавливаются под днищем судна, п подруливающие устройства о поперечном туннеле.
Известны также конструкции полупогружных платформ и судов, на которых дополнительно к туннельным подруливающим устройствам или к поворотным колонкам размещены под днищем корпуса понтона, в составе системы динамической стабилизации используются винтовые неловоротные подруливающие устройства, устанавливаемые на верхней палубе понтона.
Недостатками современных конструкций морских полупогружных платформ и судоо с системами динамической стабилизации являются сложность замены или ремонта движителей системы стабилизации без постановки платформы или судна о док. необходимость применения специальных средств для успокоения качки, а также невозможность изменения величины заглубления понтона без использования балластной системы. Движители, расположенные под днищем, должны убираться вовнутрь корпуса понтона при различных эксплуатационных условиях (во время перехода судка для снижения сопротивления движению, при установке платформы на грунт или при условиях постановки в док и при выводе из дока). Необходимость обеспечения подводного монтажа дпмжительиых колонок или необходимость их выдвижения приводят к усложнению конструкции движительпых колонок, увеличению трудоемкости работ по их техническому обслуживанию и повышению стоимости системы динамической стабилизации.
Цель изобретения - повышение технико-экономических характеристик полупог- ружпой платформы или полупогружного судна за счет упрощения конструкции и обеспечения ремонта движителей системы динамической стабилизации на плаву, по- оышсния эффективности диижителей и улучшения условий эксплуатации системы
динамической стабилизации, а также возможность частичного изменения зэглубле- лия понтонов без использования балластной системы.
Поставленная цель достигается тем, что о системе динамической стабилизации пол- упогружиой платформы или полупогружно- го судна движители выполнены крыльчатыми с верхним расположением ло0 пастей, при этом оси вращения движителей наклонены к вертикали в диапазоне 20-30° (традиционное применение крыльчатых движителей на днище корпуса судна, лопасти расположены вниз).
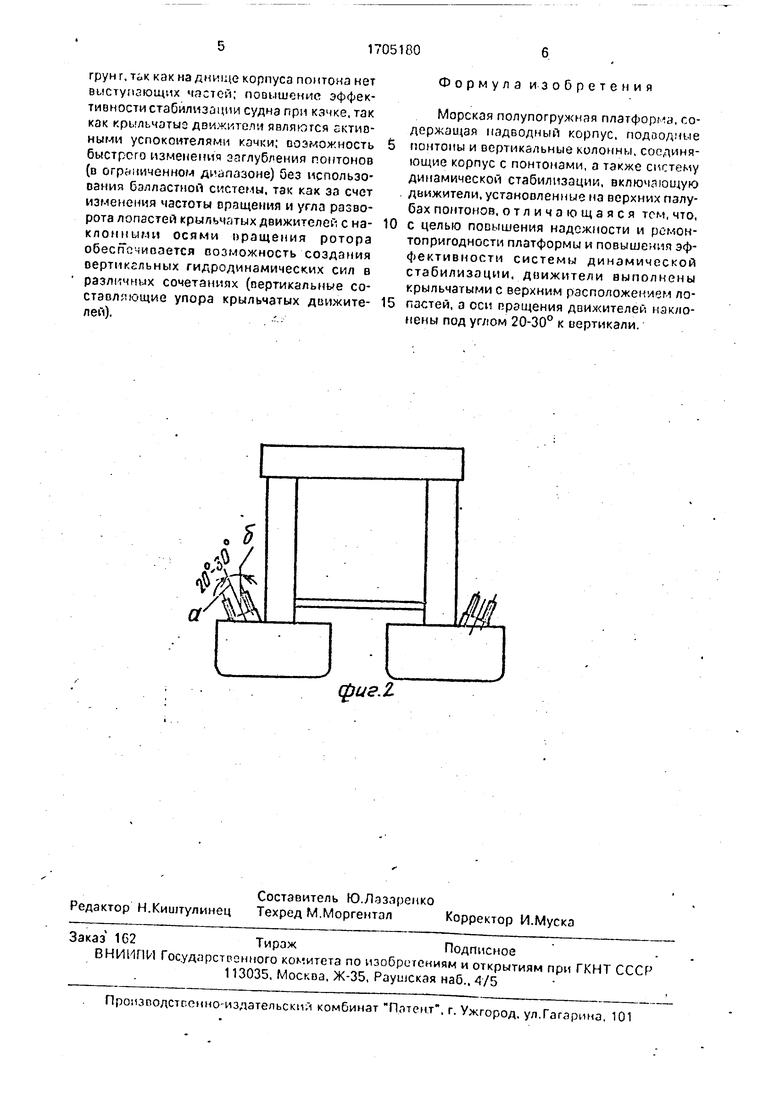
5 На фиг.1 изображена морская пол- упогружная платформа (судно), внешний боковой вид; на фиг.2 - то же, вид спереди.
Морская полупогружная платформа
0 (судно) содержит корпус 1, понтоны 2 и соединяющие их с корпусом 1 вертикальные колонны 3. По верхней палубе понтонов 2 в носовых и кормовых частях размещены крыльчатые движители (КД) А с верхним рдс5 положением лопастей 5, при этом оси а вра- . щепия движителей 4 наклонены от вертикали б.
При эксплуатации платформы (судна) в погруженном положении (позиция I) ватер0 линия находится выше лопастей КД А. При переходах платформы (судна) ватерлиния проходит по понтонам 2 (позиция II) как у обычного водоизменяющего судна - движение по-походному осуществляется с по5 мощью главно о движителя или с помощью сопровождающегося буксира (при несамоходной платформе).
Замена крыльчатого движителя 4 или егосоставныхчастей производится на плаву
О платформы (судна) при позиции II, работы по ремонту движителя А (либо по замене его лопастей или уплотнений) легко выполнимы и являются менее трудоемкими по сравнению с работами по ремонту (замене) дпижи5 телей колонки на обычных платформах (суднах) с колонками и подруливающими ус- тройствами.
Кроме того, использование именно крыльчатого движителя с наклонными
0 осями вращения в пределах 20-30° позволяет получить более эффективное динамическое позиционированце, так как крыльчэтые движители обеспечивают более быстрое и точное изменение упора по
5 величине и направлению по сравнению с колонками и по сравнению с системой стабилизации, состоящей из поперечных подруливающих устройств и главного гребного оинта; обеспечение возможности установки платформы (судна) па
грун г, так как на днище корпуса понтона кет выступающих частой; повышение эффективности стабилизации судна при качке, так как крыльчэтыз движители являются активными успокоителями качки; возможность быстрого изменения заглубления понтонов (в ограниченном диапазоне) без использования балластной системы, так как за счет изменения частоты вращения и угла разворота лопастей крыльчатых движителей с наклонными осями вращения ротора обеспечивается возможность создания вертикальных гидродинамических сил в различных сочетаниях (вертикальные составляющие упора крыльчатых движителей).
0
5
Формула изобретения
Морская полупогружная платформа, содержащая надводный корпус, подоодные понтоны и вертикальные колонны, соединяющие корпус с понтонами, а также систему динамической стабилизации, включающую движители, установленные на верхних палубах понтонов, отличающаяся тем, что, с целью повышения надежности и ремонтопригодности платформы и повышения эффективности системы динамической стабилизации, движители выполнены крыльчатыми с верхним расположением лопастей, а оси прэщения движителей наклонены под углом 20-30° к вертикали.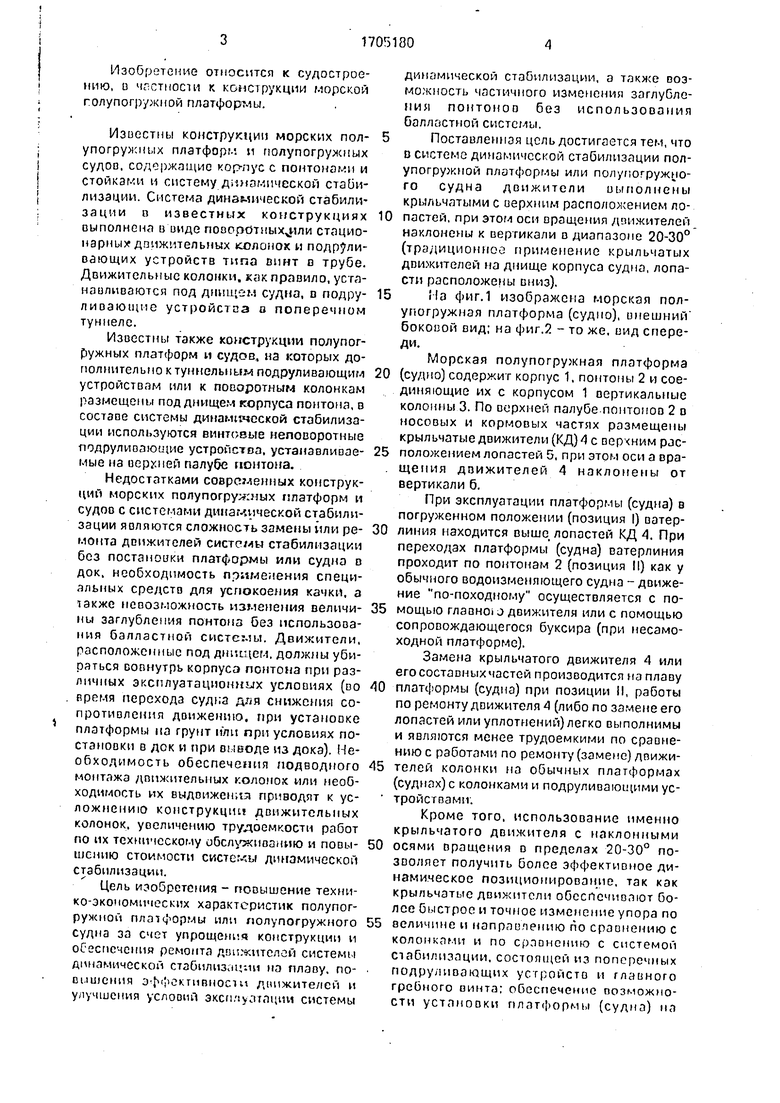
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| ПОЛУПОГРУЖНОЙ МНОГОЦЕЛЕВОЙ МОРСКОЙ КОМПЛЕКС | 2021 |
|
RU2757512C1 |
| ПОЛУПОГРУЖНАЯ БУРОВАЯ ПЛАТФОРМА КАТАМАРАННОГО ТИПА | 2012 |
|
RU2529098C2 |
| РЫБОПРОМЫСЛОВОЕ СУДНО С КОРПУСОМ КОМБИНИРОВАННОЙ ФОРМЫ И ПОВОРОТНЫМИ ВИНТОРУЛЕВЫМИ КОЛОНКАМИ | 2014 |
|
RU2548243C1 |
| МОРСКАЯ ПЛАВУЧАЯ БАЗА ОСТРОВНОГО ТИПА | 2020 |
|
RU2747690C1 |
| СПОСОБ РЕМОНТА ПЛАВУЧЕЙ ПОЛУПОГРУЖНОЙ БУРОВОЙ ПЛАТФОРМЫ | 2000 |
|
RU2224680C1 |
| СПОСОБ ЛОКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И КОРРЕКЦИИ МЕСТОПОЛОЖЕНИЯ ПЛАВСРЕДСТВА | 2023 |
|
RU2799688C1 |
| ПЛАВУЧАЯ МОРСКАЯ ПЛАТФОРМА С ПРИСОЕДИНЕННЫМИ К ПОНТОНАМ РАСШИРИТЕЛЬНЫМИ ПЛАСТИНАМИ ДЛЯ УМЕНЬШЕНИЯ ЕЕ ВЕРТИКАЛЬНОЙ КАЧКИ | 2014 |
|
RU2631724C2 |
Изобретение относится к судостроению, о частности к конструкции морских полупогружных платформ. Цель - повышение надежности и ремонтопригодности платформ и повышение эффективности системы динамической стабилизации. Морская полупогружная платформа содержит корпус 1 с понтонами 2 и вертикальными колоннами 3 и расположенные на верхней палубе понтона 2 крыльчатые движители 4 с верхним расположением лопастей 5. Оси вращения движителей 4 наклонены к вертикали под углом к в диапазоне 20-30°. При работе движителей 4 за счет наклона их осей вращения создается вертикальная составляющая упора, позволяющая изменять осадку платформы без принятия балласта. Одновременно уменьшается возможность повреждения движителей за счет их верхнего расположения и облегчается постановка платформы в док. 2 ил. со С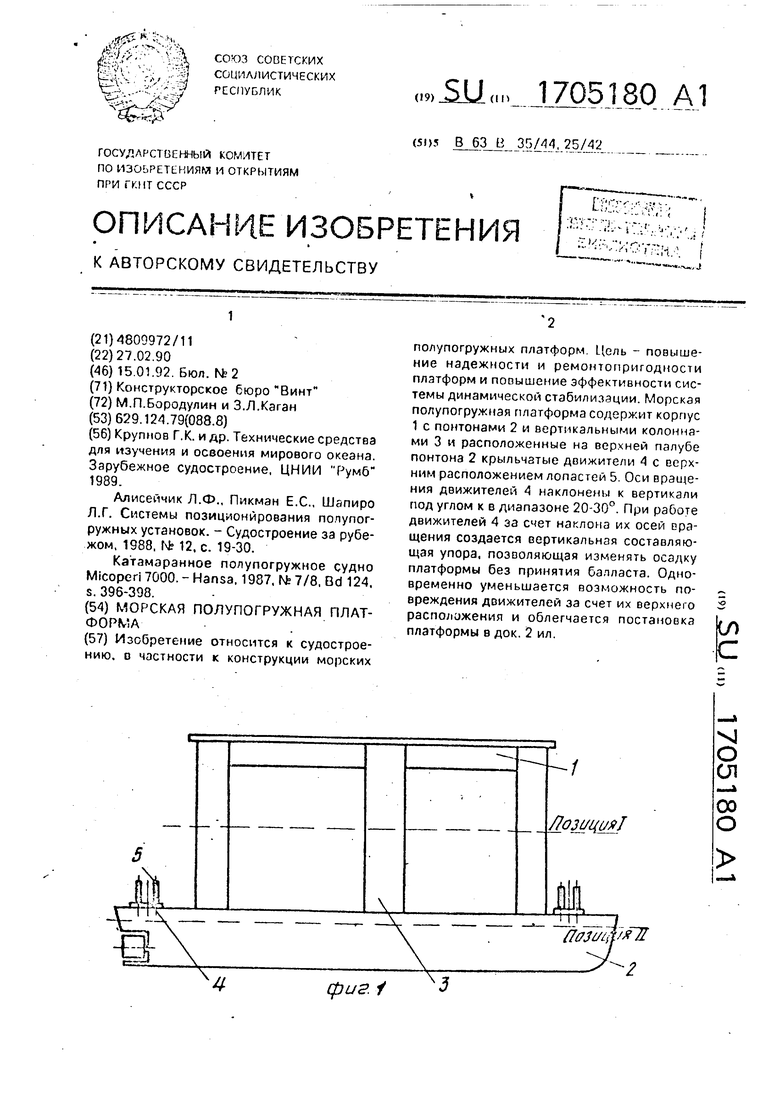
/
(pue.Z
| Крупное Г.К | |||
| и др | |||
| Технические средства для изучения и освоения мирового океана | |||
| Зарубежное судостроение, ЦНИИ Румб 1989 | |||
| Алисейчик Л.Ф., Пикман Е.С., Шапиро Л.Г | |||
| Системы позиционирования полупог- ружных установок | |||
| - Судостроение за рубежом, 1988, № 12, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| ГЕНЕРАТОР ДЛЯ ПАРО-ГАЗОВОЙ СМЕСИ | 1925 |
|
SU7000A1 |
| - Hansa, 1987, Nfc 7/8, Bd 124 | |||
| s | |||
| Приспособление для подъема падающих гребней в машинах льнопрядильного, джутового и т.п. производств | 1913 |
|
SU396A1 |
